基于TMS320C6748和XC6SLX16的超聲多普勒流量計的設計
2018-08-31 04:36:14曲兆松夏麗娟
水利科技與經濟 2018年5期
曲兆松,王 帥,夏麗娟
(南京思孚泰科信息技術有限公司,南京 210023)
0 引 言
目前,明渠流量測量是流量監測需求中的一個重要角色,而明渠流量計是用于非滿管狀態、敞開渠道中測量自由表面流的流量儀表,廣泛應用于城市供水水渠、污水排放水渠、工礦企業管線供水、廢水以及農業灌溉等關系國計民生的重要環境當中。
超聲多普勒原理是基于多普勒原理,利用遙距測量的方式,對位于探頭前方一定距離的采樣點進行流速測量。超聲多普勒流量計是基于超聲學多普勒效應原理基礎上研制的測流、測量產品。被測量點位于探頭的前方,不會破壞流水環境,使流量流速測量結果的瞬時性得以保證。該流量計具有測量精度高、響應速度快,既可以用來測量弱流,也可以測量強流。由于流量計的探頭結構是根據適用野外環境需求進行特殊設計的,所以堅固耐用,不易損壞,使流量計具有更好的實用、耐用等特點。
本文采用超聲多普勒測速計算,并結合模擬電路、FPGA、DSP等電子技術,實現信號發射、信號接收、模擬信號放大、數字電路采集、信號處理、信號傳輸等,獲得水體流速、流量,為水力學、流體力學基礎研究和國家能源、水資源利用和水污染防治等重大戰略需求提供堅實的技術支撐與設備保障。
1 系統結構設計
整個硬件系統主要由超聲傳感器、信號發射模塊、信號接收模塊、信號邏輯控制模塊、信號緩存模塊以及信號處理模塊6個部分。見圖1。在信號邏輯控制模塊中,XC6SLX16(即FPGA)產生脈沖信號,并發送到信號發射模塊,脈沖信號經過發射模塊后被放大,然后被發送至超聲探頭,超聲探頭會根據脈沖電信號的變化產生相應的超聲波信號。當發射出去的超聲波遇到水粒子后會被反射回來,并被接收探頭接收,反射信號需要依次經過信號放大,信號濾波電路,然后進入ADC電路,實現模擬、數字信號的轉換,通過FPGA的控制,數字信號將被緩存到信號緩存模塊,同時被傳送到TMS320C6748(即DSP)。 DSP實現數字信號的處理與分析,獲得信號的頻移,從而計算得出水流的速度。通過壓力傳感器獲得所在位置的水的深度,然后結合所在渠道的寬度算出橫截面,這樣即可算出當前位置的流量值。
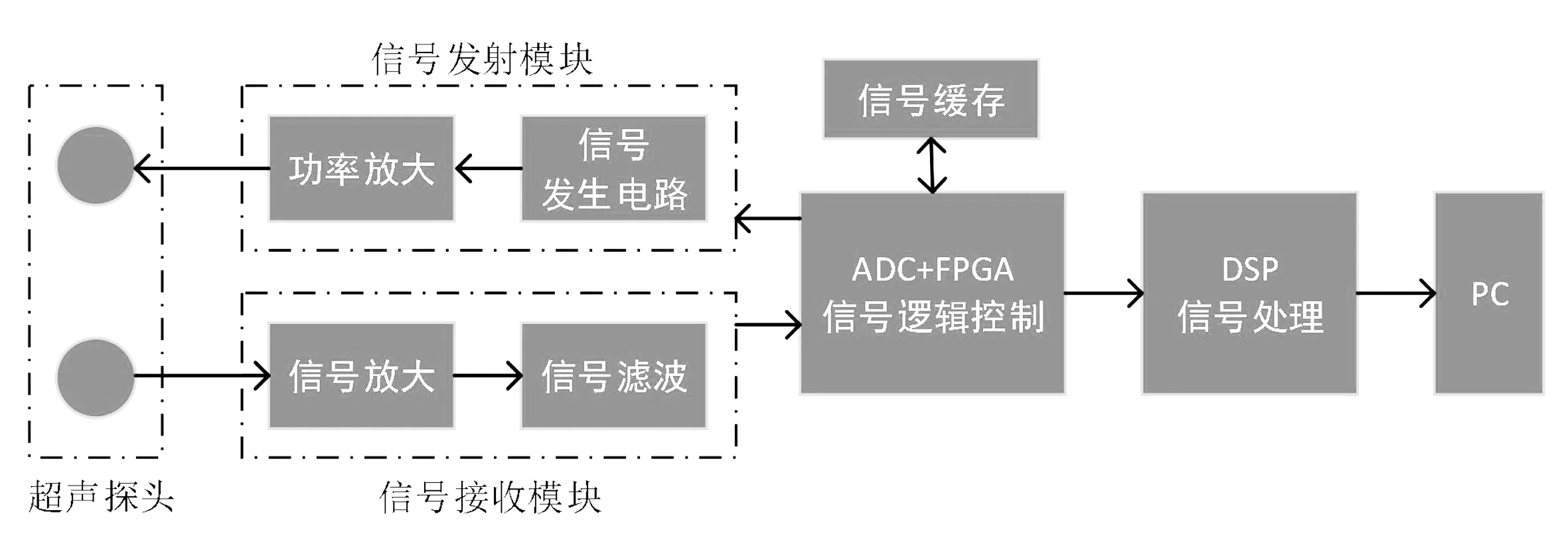
圖1 系統結構圖Fig.1 The structure of system
1.1 系統硬件結構設計
本系統中采用的XC6SLX16屬于Spartan-6系列的FPGA。Spartan6系列具有成本低,功耗低、處理速度快等特點,具有多電壓、多標準接口,便于兼容擴展應用。支持DDR、DDR2、DDR3和LPDDR存儲模塊,數據速率高達800 Mb/s。采用多端口總線結構,帶有獨立FIFO,能夠減少設計時序問題。還擁有豐富的邏輯資源,支持移位寄存器或分布式RAM,具有雙觸發器功能。擁有高性能算術與信號處理,不僅配備快速18X18乘法器和48位累加器,同時還擁有流水線與級聯功能。時鐘管理模塊(CMT),具有低噪聲,高靈活度的時鐘控制結構,能夠消除時鐘歪斜和占空比失真,精準實現倍頻、分頻和調相。采用低成本、簡易的配置方式,利用雙引腳自動檢測配置,支持第三方SPI(高達4位寬度)和NOR閃存。XC6SLX16擁有2 278個Slice和18 224個觸發器,BlockRAM模塊最大可達576 Kb,擁有最多可達232用戶I/O接口。
采用異步SDRAM芯片 IS61LV25616AL作為數據緩存芯片,擁有高速率、低功耗、三態輸出、全靜態操作、無時鐘控制等特點,操作極為簡單方便。擁有4M存儲空間,保證測量數據安全存儲。
數據處理芯片TMS320C6748是DSP芯片,是德州儀器(TI)推出浮點功能的全新高性能處理器,這款芯片也是業界功耗最低的浮點數字信號處理器,擁有二級高速緩沖存儲器結構,128kb內存共享內存,6個ALU功能單元,支持雙32X32-Bit乘法器,4個16X16-Bit乘法器或者更復雜的乘法器,支持錯誤檢測,配備兩個外部存儲器接口EMIFA和DDR2/Mobile DDR控制器,3個可配置的16550型UART模塊,10/100 Mbps Ethernet MAC (EMAC)。
1.2 系統軟件結構設計
本系統檢測軟件流程圖見圖2。系統上電后DSP、FPGA分別完成初始化,完成系統的默認配置。FPGA中完成對發射信號和接收信號的邏輯控制,以及對信號數據的緩存和上傳DSP,DSP中完成對接收到信號的處理,并向上發送給PC。
2 流速儀測量原理及流量計算
2.1 超聲多普勒流速測量原理及流速計算
超聲多普勒原理把觀測源的頻率變化同觀測源和觀測者的相對速度相聯系。當流動的水體中所包含的細小的泥沙顆粒和其他物體伴隨水體進行運動時,發射的超聲波頻率遇到顆粒物后發生反射和散射現象,則超聲頻率將發生變化,即由于相對運動導致的頻率的變化。
多普勒頻移即由于反射物的運動造成的接收到的反射信號的頻率變化,也能描述為兩個連續且獨立的反射信號的相位差,其原理示意圖見圖3。發射聲波的脈沖中只有非常小的聲波能量被反射回傳感器,大部分聲波能量被吸收或者是被反射到其它方向。當反射體遠離傳感器端時,超聲波頻率移到較低頻率,這種頻移同超聲傳感器與反射體之間的速度成比例。部分多普勒頻移的超聲波散射到接收傳感器端,散射體將作為超聲波源,超聲波頻移一次后,又再次頻移。通過對測量空間內大量散射體的多普勒頻移信息的感知和處理,可計算出水流速度 。
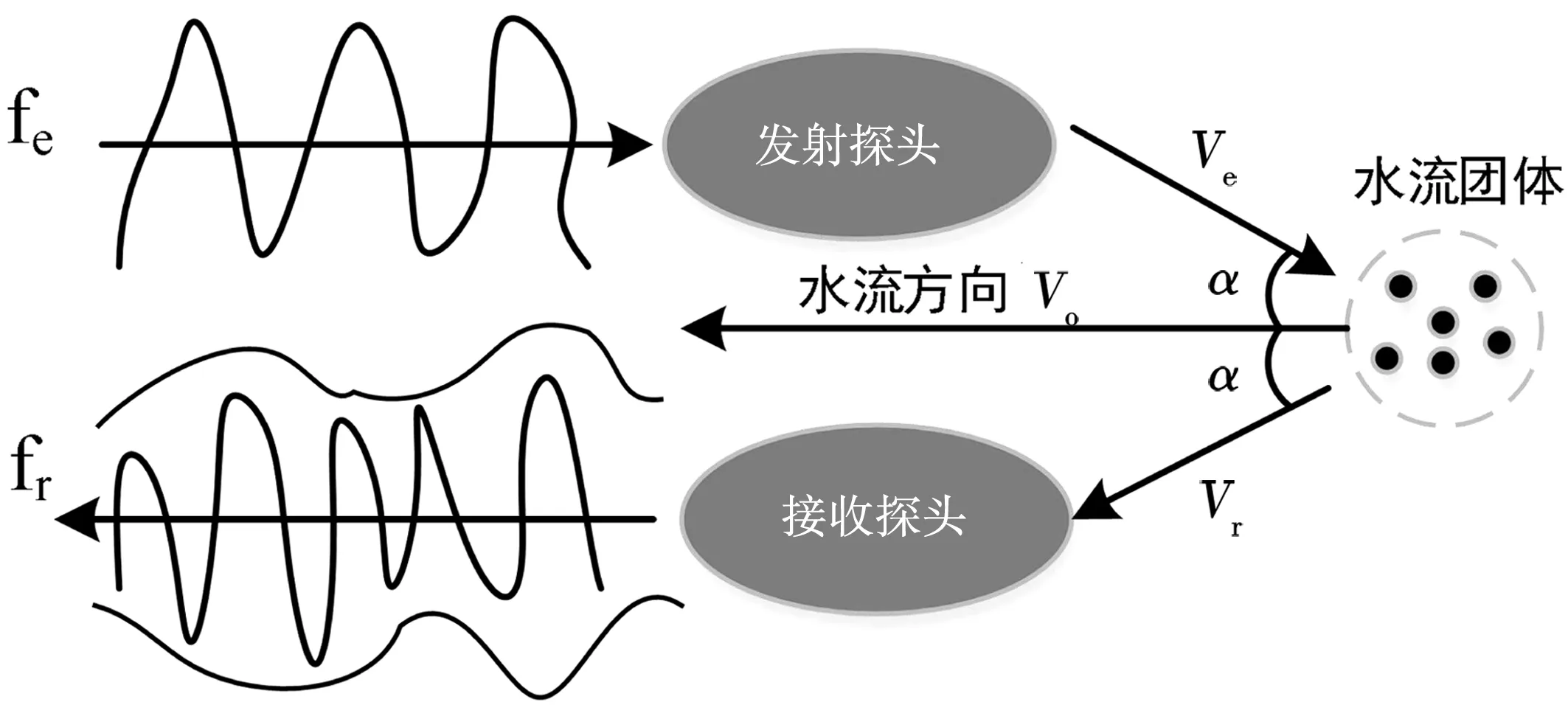
圖3 超聲多普勒原理Fig.3 Ultrasonic Doppler principle
其中,fe為發射端發射信號頻率,fr為頻率fe經過水顆粒散射后的攜帶偏移信息fd的超聲波信號頻率,即多普勒頻移:
fd=fr-fe
(1)
當水流團體以速度V0向探頭流動時,超聲波被水流團子反射回去后,接收探頭接收到的聲波頻率為:
(2)
其中c為聲波速度。由式(1)和式(2)可得超聲多普勒頻移:
(3)
因為c遠大于Vr,Vr與Ve近似相等,所以:
(4)
由此可以得出:
(5)
2.2 流量計算
根據壓力傳感器可以得知當前測量位置的水深H,根據測試現場設計標準中,可以獲得水槽或水渠等的寬度信息,這樣即可獲得橫截面積S。將式(5)代入流量計算公式Q=V0S,即可得出流量值Q與頻偏fd的關系式:
(6)
3 結 論
本文介紹了一種基于超聲多普勒原理,采用FPGA+DSP相結合的低功耗明渠流量計。通過一發一收組合方式實現聲學多普勒頻移信號的獲取。硬件設計上對信號進行了濾波,放大處理;軟件上通過算法對采集數據進行優化處理,保證了測量數據精度的,再結合壓力傳感器得到的水深信息從而獲得流量值。該系統結構簡單,安裝便捷,可以廣泛應用于流量測量。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中國生殖健康(2019年3期)2019-02-01 06:12:26
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00