POS在鐵路軌道不平順性檢測中的應用
2018-09-03 00:46:50孟凡效張宇冉丁樂樂黎蕾蕾權(quán)冉冉
導航定位學報 2018年3期
孟凡效,張宇冉,丁樂樂,黎蕾蕾,權(quán)冉冉
(1.天津市勘察院,天津 300191;2.重慶大學 航空航天學院,重慶 400044;3.中交天津港灣工程研究院有限公司,天津 300220)
0 引言
隨著我國高速鐵路的建設(shè)與運營里程的增加,人們的出行變得方便快捷;與此同時,人們對于乘車舒適度和安全度的要求越來越高。鐵路軌道不平順性是影響列車行駛快慢和安全性的一項重要指標。
目前國內(nèi)外對于鐵路軌道不平順性檢測的手段主要包括以下幾種:大型綜合高速軌檢車、便攜式軌檢小車、弦線與道尺[1]。但是每一種方式都存在各自的缺點:大型綜合高速軌檢車雖然可測線路整體狀況,但無法對局部以及重點路段進行精確測量,而且綜合軌檢車數(shù)量少、技術(shù)復雜,成本高昂[2];便攜式軌檢小車可精確測量小區(qū)域的線路狀況,但是作業(yè)效率低,而且精度受外界因素(控制點點位精度、溫度、風力等)影響較大,且每次遷站只能測量60 m左右,無法進行長波的檢測[3];弦線與道尺技術(shù)手段落后,效率低且受人為因素影響較大。鐵路的快速發(fā)展,對于高鐵而言每日僅4 h的天窗時間用于檢查,傳統(tǒng)軌道檢測手段難以滿足現(xiàn)實的實際應用需要;因此迫切需要一種新的軌道平順性檢測手段來提高人工檢測效率和精度。
目前集全球衛(wèi)星導航系統(tǒng)(global navigation satellite system,GNSS)和慣性導航系統(tǒng)(inertial navigation system,INS)于一體的定位測姿系統(tǒng)(positioning and orientation system,POS)主要應用于航空遙感和車載移動測量。隨著慣導設(shè)備精度的提高,POS系統(tǒng)得到的點位精度也逐步提升[4]。POS系統(tǒng)可直接輸出載體高精度的三維位置和姿態(tài)角信息,顧及到INS的高采樣率特性,依次綜合考慮離散點位置和姿態(tài)信息便可重繪出載體的運動軌跡。這正是鐵路檢測所需要的,載體平臺和軌道之間無縫運動,載體平臺的軌跡便可代表軌道的幾何形狀,既可以得到高精度的數(shù)據(jù)結(jié)果,又可以提高效率,達到軌道幾何狀態(tài)檢測的目的。
1 鐵路軌道不平順參數(shù)及檢測方式
軌道的幾何狀況檢測參數(shù)可以分為內(nèi)部幾何參數(shù)和外部幾何參數(shù)[5]。內(nèi)部幾何參數(shù)主要刻畫鋼軌間的相對精度指標,主要包含軌距、超高(水平)、軌向(正矢)、高低。為了進一步從整體上對軌道進行分析,防止其實際位置偏離設(shè)計位置,需要檢查其外部幾何參數(shù),即中心線實際的絕對位置[6]。傳統(tǒng)的檢測方式主要是使用全站儀靜態(tài)采集軌檢小車進行檢測。
1.1 軌距
軌距是指左右兩股鋼軌內(nèi)側(cè)頂面下16 mm處兩作用邊間的最小間距[5]。我國當前使用的標準軌距值是1 435 mm,實測軌距值和標準軌距的差值稱為軌距誤差。
在軌距檢測時,通常使用全站儀軌檢小車上面的軌距傳感器進行軌距測量。新的POS方式也是通過安裝在小車上面的軌距傳感器對軌距進行測量的。
1.2 超高
超高(水平)指鐵路軌道在相同里程點的左右鋼軌頂面的實測高程與設(shè)計高程的差值[7]。在軌道直線部分高差理論設(shè)計值為0,直線段實測值與設(shè)計值0之間的差值稱為水平不平順。曲線段的設(shè)計值一般不是0,根據(jù)路線設(shè)計而定,曲線段的實測值與設(shè)計值的差值稱為超高不平順。
傳統(tǒng)測量時通過全站儀軌檢小車上面的水平傳感器測量的橫向傾角及鋼軌頂面的中心距離進行計算,新的POS方式是通過組合導航計算的橫滾角代替水平傳感器計算的傾角來計算超高值。
1.3 軌向(正矢)
二者本質(zhì)為同一個檢測項目,反映軌道左、右二軌在橫向方向的平順性指標,直線段稱為軌向,曲線段稱為正矢[5]。本文以軌向為示例進行詳細說明。不同的國家對于軌向的檢測方法有不同的指標,我國傳統(tǒng)方法是以10 m弦長作為檢測方法。如圖1中,以B點為圓心,以10 m長為半徑做圓,會和依據(jù)實測的軌道平面坐標(含左、右軌)擬合出的曲線相交在A、C2點,則B點到AC連線的水平距離即為測點B處的實測軌向值[8]。

圖1 我國軌向10 m弦長檢測原理
傳統(tǒng)全站儀軌向檢測方式是通過外業(yè)測量前在處理軟件中輸入測量線路的設(shè)計曲線參數(shù)及各控制點坐標;實際測量時,利用后方交會原理,通過自動全站儀觀測控制點坐標及軌檢小車棱鏡,得到全站儀軌檢小車上安裝棱鏡的中心點坐標;根據(jù)小車的設(shè)計參數(shù),反求出測量點左右軌道面的坐標值;然后按照相應參數(shù)計算公式利用各點東、北向坐標值和設(shè)計值計算軌向值。
1.4 高低
高低是指軌道沿鐵路設(shè)計線路方向在豎平面內(nèi)的不平順程度,其定義、檢測方法和軌向類似,規(guī)范中對軌向的規(guī)定同樣適用于軌道的高低檢測[9-10]。與計算軌向需使用東、北向坐標不同,在計算高低時需要測量點的里程及高程數(shù)據(jù)進行高低參數(shù)的計算。
1.5 軌道幾何測量精度要求
按照《高速鐵路設(shè)計規(guī)范》要求,表1列出線路軌道靜態(tài)作業(yè)允許各不平順性參數(shù)偏移量的范圍值。

表1 線路軌道靜態(tài)作業(yè)允許各不平順性參數(shù)偏移量范圍值
2 GNSS/INS組合POS模型
本文中GNSS/INS組合是使用卡爾曼濾波對GNSS和INS進行松散組合實現(xiàn),其對應的狀態(tài)方程和觀測方程分別為
(1)
(2)

針對軌道檢測所要達到的高精度要求,同一測段采用多次重復測量方式,使用載波相位差分算法對GNSS觀測數(shù)據(jù)進行處理。對于解算得到的GNSS結(jié)果數(shù)據(jù),通過斜率識別法分割區(qū)間及正交最小二乘擬合算法對每個小區(qū)間進行線性擬合優(yōu)化,提高GNSS結(jié)果的相對定位精度。將優(yōu)化后的GNSS結(jié)果與INS數(shù)據(jù)進行松組合,采用正-反-正三向卡爾曼濾波算法對組合數(shù)據(jù)進行優(yōu)化處理[11],對組合結(jié)果按照實際測量路段線型進行再次線性優(yōu)化,得到高精度的離散點位置和姿態(tài)數(shù)據(jù)。根據(jù)各設(shè)備之間的安裝位置以及姿態(tài)角信息,將得到的高精度點位位置轉(zhuǎn)化到計算鐵路不平順性參數(shù)所在的坐標系統(tǒng)中,然后按照各不平順參數(shù)的計算公式計算各參數(shù)。
3 實驗與結(jié)果分析
為了驗證GNSS/INS組合計算不平順參數(shù)新方式在計算鐵路不平順性參數(shù)中的正確性和可行性,通過在鐵路運行天窗期對同一測試鐵路段分別使用傳統(tǒng)全站儀靜態(tài)小車和本文新檢測方式對已運營線路實地采集數(shù)據(jù),與鐵路設(shè)計參數(shù)進行30 m弦長不平順性參數(shù)對比來進行實驗驗證。
3.1 系統(tǒng)組成與采集實驗
實驗數(shù)據(jù)為2016年12月某天晚上在鐵路天窗期鐵路客運專線運營線路實地使用POS小車采集的數(shù)據(jù)。基站通過三腳架安放在鐵路沿線的CPII控制點位上面,基站使用的GNSS接收機為北斗衛(wèi)星導航系統(tǒng)(BeiDou navigation satellite system,BDS)、全球定位系統(tǒng)(global positioning system,GPS)、格洛納斯衛(wèi)星導航系統(tǒng)(global navigation satellite system,GLONASS)三星雙頻,數(shù)據(jù)采樣率為2 Hz,GNSS接收機基站架設(shè)如圖2所示。

圖2 基站實地采集數(shù)據(jù)
移動站接收機設(shè)備與慣導設(shè)備安裝在POS小車上面,移動站的GNSS接收機同樣為BDS/GPS/GLONASS三星雙頻,采樣率為20 Hz。慣性測量單元(inertial measurement unit,IMU)設(shè)備使用的國產(chǎn)某型號的激光慣導設(shè)備,該IMU設(shè)備的采樣率為200 Hz,陀螺儀零偏穩(wěn)定性為0.001(°)/h,加表零偏穩(wěn)定性為4.9×10-5m/s2,軌檢數(shù)據(jù)采集設(shè)備在POS小車上面的安裝位置如圖3所示。

圖3 POS小車設(shè)備安裝說明
數(shù)據(jù)采集流程如下所述:首先架設(shè)基站,把基站設(shè)置靜態(tài)采集數(shù)據(jù)模式,待基站成功鎖星并且開始正常存儲數(shù)據(jù)后,進行POS小車設(shè)備通電,數(shù)據(jù)采集開始,正反向共推行4趟。POS小車在起點位置首先靜態(tài)采集10 min左右,隨后以1.5~2.0 m/s速度人工推行POS小車1.2 km左右至測試終點位置,隨后在終點位置靜態(tài)采集10 min,然后反向推行至起點位置,起點位置靜態(tài)采集5 min,隨后再正向推行至終點位置,終點位置靜態(tài)采集3 min,反向推行至起點位置,起點位置靜態(tài)采集10 min,隨后關(guān)閉設(shè)備電源,一次數(shù)據(jù)采集完成。基站架設(shè)位置離移動站的距離為50~1 300 m。數(shù)據(jù)采集條件良好,屬于短基線動態(tài)差分解算,POS小車推行途中沒有發(fā)生GNSS鎖星失敗情況。
3.2 GNSS差分結(jié)果擬合與不擬合對比
對采集的GNSS數(shù)據(jù),使用動態(tài)事后差分高精度解算軟件處理采集的數(shù)據(jù),并按照采集的趟數(shù)對采集的數(shù)據(jù)按照線型擬合算法進行優(yōu)化后處理,并將點位平面坐標按照里程和高程進行畫圖。
以鐵路直線段為例進行擬合方式說明。通過差分得到點位坐標,平面東北向坐標使用3 m長度的大區(qū)間來擬合長度為0.1 m的小區(qū)間離散平面點,高程坐標使用5 m長度的大區(qū)間進行擬合長度為0.1 m的小區(qū)間離散高程點;通過大區(qū)間的內(nèi)部離散點,按照直線方程y=kx+b,使用正交最小二乘擬合算法獲得大區(qū)間段的斜率k以及截距b,并通過得到的k和b,根據(jù)與待擬合小區(qū)間的點位數(shù)學關(guān)系來擬合處理長度為0.1 m小區(qū)間內(nèi)部的離散點。
圖4給出了GNSS平面位置優(yōu)化結(jié)果對比整體圖,圖5給出了平面位置優(yōu)化結(jié)果對比局部放大圖。從圖5中可以明顯地看出每一趟數(shù)據(jù)的分布情況以及使用線型擬合算法對數(shù)據(jù)進行優(yōu)化后的結(jié)果對比情況,并且圖中可以看到優(yōu)化后的結(jié)果與原始數(shù)據(jù)整體線型非常吻合。
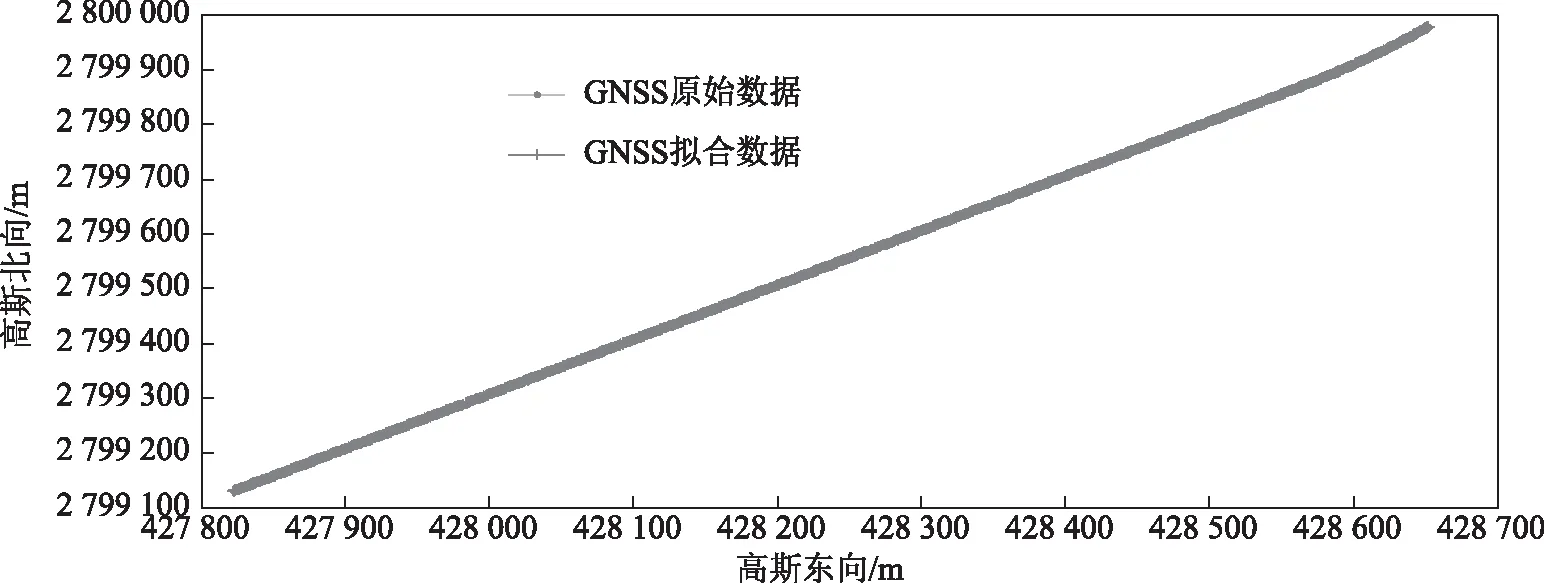
圖4 GNSS平面位置優(yōu)化結(jié)果
從圖4、圖5可以看出,本次GNSS采集數(shù)據(jù)的平面位置大約在直徑為2 cm的圓柱內(nèi),擬合后的平面位置處于原始數(shù)據(jù)離散點的中間,擬合算法是根據(jù)該段實際鐵路設(shè)計線型所處的線型進行擬合,因此擬合后的線型相較于原始數(shù)據(jù)線型,與實際鐵路設(shè)計線型更加吻合。
GNSS高程優(yōu)化結(jié)果如圖6所示,從圖6可以看出,擬合后的高程處于原始高程數(shù)據(jù)離散點的中部,而且擬合后的軌跡與原始數(shù)據(jù)吻合。對圖6進行局部放大,得到圖7。
從圖7可以看出,GNSS原始差分結(jié)果高程的范圍為直徑4 cm的圓柱帶,擬合后的高程在5 mm之內(nèi),可以看出明顯提高了測量得到的點位高程精度,從而可以更好地用于計算軌檢參數(shù)值。

圖5 GNSS平面位置優(yōu)化結(jié)果局部放大
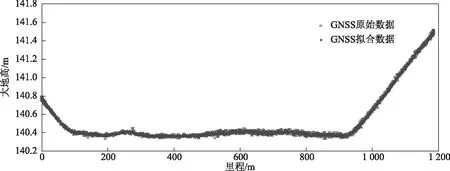
圖6 GNSS高程優(yōu)化結(jié)果

圖7 GNSS高程優(yōu)化結(jié)果局部放大
使用擬合算法的意義在于擬合后GNSS結(jié)果可以消除觀測中存在的隨機誤差,從而獲得更高精度的三維點位坐標;高精度的GNSS差分擬合結(jié)果可以為INS數(shù)據(jù)組合濾波提供高精度的量測更新數(shù)據(jù),從而得到高精度的反饋校準值,組合計算出來的位置、速度及姿態(tài)信息也會相應提高,進而對于提高計算不平順參數(shù)精度有顯著效果。
3.3 多趟測量姿態(tài)角重復性對比
對采集的數(shù)據(jù)進行GNSS/INS組合導航解算處理,得到各趟姿態(tài)角數(shù)據(jù),按照到起始點的距離為橫坐標,每一趟計算得到的姿態(tài)角為縱坐標進行畫圖對比。為了方便查看姿態(tài)角重復性的情況,對第二、第三及第四趟數(shù)據(jù)計算得到的姿態(tài)角數(shù)據(jù)分別進行一定量平移。例如對航向角結(jié)果,第二、第三及第四趟分別平移0.5、1.0、1.5°,以便查看各趟數(shù)據(jù)吻合情況。圖8、圖9、圖10分別列出俯仰角、橫滾角及航向角的4趟數(shù)據(jù)重復性對比情況。
由圖可以看出,對采集的4趟數(shù)據(jù)計算得到的俯仰角、橫滾角以及航向角,整體的線型走勢都非常一致,線型的升降起伏規(guī)律都特別明顯,沒有發(fā)現(xiàn)有異常點的出現(xiàn),說明了對數(shù)據(jù)處理的正確性。

圖9 橫滾角重復性對比

圖10 航向角重復性對比
從圖9橫滾角度值的變化趨勢可以發(fā)現(xiàn),從里程0~110 m的橫滾角度值在2.7°左右,從里程110~190 m左右橫滾角度值從2.7°減小至0°左右,從里程190~1 180 m的橫滾角度值都是在0°左右,從而可以看出從0~110 m的觀測段數(shù)據(jù)屬于圓曲線段數(shù)據(jù),從里程110~190 m的觀測段數(shù)據(jù)為緩和曲線段的數(shù)據(jù),從里程190~1 180 m的觀測段數(shù)據(jù)為直線段的數(shù)據(jù),而且這也和實測軌道所處的線型相吻合。
從圖10的航向角度值變化趨勢也可以發(fā)現(xiàn),從里程0~190 m的航向角度值一直處于變化中,說明該段數(shù)據(jù)顯示的軌道所屬于的線型為曲線段;而在里程190~1 180 m的航向角一直保持在135.3°左右,說明該段測量的數(shù)據(jù)屬于的線型為直線段,進一步說明對采集數(shù)據(jù)處理的正確性。
為了更加形象地說明姿態(tài)角重復性的吻合度,對計算得到的每一趟的姿態(tài)角數(shù)據(jù)進行量化對比,得到任意2趟數(shù)據(jù)進行姿態(tài)角差值的均值、最大值以及標準差的計算,從而可以進一步說明計算結(jié)果重復性的精度以進行定量分析。為了便于表示,使用D12代表第一趟計算結(jié)果與第二趟計算結(jié)果之間姿態(tài)角差值的對比情況。表2列出了姿態(tài)角任意2趟之間的差值統(tǒng)計結(jié)果。
由表2可以看出:俯仰角的任意2趟差值均值在0.017°以內(nèi),最大值在0.006°以內(nèi),標準差在0.001 1°以內(nèi);橫滾角的任意2趟數(shù)值差均值不大于0.01°,最大差值不大于0.021°,標準差不大于0.005°;航向角的任意2趟的差值均值在0.023°以內(nèi),最大差值不超過0.03°,標準差在0.001°左右。

表2 姿態(tài)角任意2趟差值對比統(tǒng)計 (°)
通過分析這些統(tǒng)計數(shù)據(jù)可以發(fā)現(xiàn),對采集4趟數(shù)據(jù)、使用本文算法解算得到的橫滾角、俯仰角以及航向角,4趟之間的吻合度都非常好,從而可以說明該算法的內(nèi)符合精度很高,更加說明本論文使用計算方式的準確性以及可靠性。
3.4 與全站儀對比實驗
對于采集的數(shù)據(jù),使用本文提到的技術(shù)手段進行數(shù)據(jù)處理,為了對比處理結(jié)果的正確性、有效性及可靠性,同時使用傳統(tǒng)的全站儀靜態(tài)小車對該段軌道進行數(shù)據(jù)的實地采集和處理,并且通過與鐵路測量段的所屬工務段聯(lián)系獲得該段軌道對應里程處的左軌、右軌以及中心線的設(shè)計坐標。通過對軌枕點上超高不平順、軌向不平順值及高低不平順值對比分析(如圖11~13所示),驗證使用新的技術(shù)手段計算結(jié)果的正確性及可靠性。

圖11 POS小車與全站儀計算超高/水平不平順值結(jié)果對比
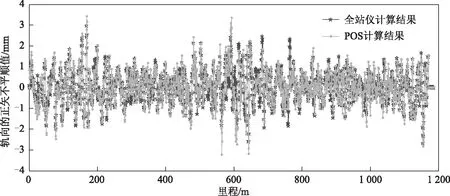
圖12 POS小車與全站儀計算軌向不平順值結(jié)果對比
由圖11及圖12可以看出:2種方式計算的軌向和高低不平順值整體趨勢是吻合的,僅部分點存在差異,該差異存在的原因主要是由于本文對慣導設(shè)備采集數(shù)據(jù)是連續(xù)的,而全站儀是間斷型(隔一采一)采集方式,部分真實情況全站儀無法反映;超高不平順的整體趨勢也是一致的,但是存在較小偏差,該部分差異是由于本文未對慣導設(shè)備與小車之間的安裝誤差角進行有效的估計。表3給出了2種方式獲得的不平順值的統(tǒng)計結(jié)果。

圖13 POS小車與全站儀計算高低不平順值結(jié)果對比

表3 POS小車和全站儀各平順值對比統(tǒng)計mm
對比表中2種方式的超高不平順值差值可得出,差值平均值為0.791 2,最大值為1.657 9,標準差為0.358 6 mm。因本測段屬于普快專線的有砟鐵路,超高不平順的限值為3 mm,因此使用本方法計算的超高不平順滿足軌道測量的精度要求。對比2種方式軌向不平順值差值可得出,差值均值為0.265 0,最大值為2.057 7,標準差為0.265 9 mm,說明二者計算的軌向不平順值幾乎一致的,存在零點幾毫米的差別。對比2種方式高低不平順值差值可得出,均值為0.357,最大值為4.82,標準差為0.466 1 mm,整體而言計算結(jié)果還是比較匹配的。
軌向和高低值存在差異主要是由于全站儀小車的采集方式并非連續(xù)測量,而POS小車則是連續(xù)采集,全站儀小車測量存在部分異常點未測情況,POS小車則可以真實反映每個點的實際情況,而且更高效和高精度,從而為不平順參數(shù)的采集提供了一種新的技術(shù)手段。
4 結(jié)束語
本文通過將已有的GNSS/INS組合POS系統(tǒng)應用到新的鐵路測量軌道不平順性領(lǐng)域,在原有算法的基礎(chǔ)上,使用優(yōu)化算法將得到的點位坐標轉(zhuǎn)換到計算不平順性值所使用的坐標系中,通過同一測段多趟采集,對每一趟姿態(tài)角進行做差對比,得出多趟姿態(tài)角,并且結(jié)果非常吻合。與傳統(tǒng)全站儀小車結(jié)果進行對比分析,得出新方式在計算30 m弦上不平順性參數(shù)與全站儀計算結(jié)果相當,且作業(yè)效率是靜態(tài)小車方式的8~10倍,可以達到預期的效果。在計算300 m弦的不平順參數(shù)方面,精度還有部分欠缺,需要進一步改進和完善。
猜你喜歡
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
北京測繪(2020年12期)2020-12-29 01:37:18
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(shè)(2019年3期)2019-10-10 01:40:18
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
電測與儀表(2016年9期)2016-04-12 00:29:52