基于序列匹配的螺旋槳軸頻自動提取方法
2018-09-03 02:51:04楊日杰鄭曉慶韓建輝李大衛
振動與沖擊 2018年16期
楊日杰, 鄭曉慶, 韓建輝, 李大衛
(1.海軍航空工程學院,山東 煙臺 264001; 2.95972部隊,甘肅 酒泉 735018)
螺旋槳噪聲是水面艦船、潛艇等水聲目標的主要噪聲源,當發生空化時,螺旋槳槳拍對空化噪聲常常會產生周期性幅度調制,通過對這種極富有節奏感的調制空化噪聲的解調處理,可以得到與調制相關的離散線譜,而這些線譜頻率可以反映出螺旋槳的軸頻、葉頻及其諧波等信息,因而利用螺旋槳空化噪聲調制信息估計螺旋槳的軸頻和葉片數等不變特征可以實現被動聲納目標的分類識別[1]。但在實際應用中,螺旋槳軸頻的自動估計是一件非常困難的事,線譜值起伏、多調制源干擾和線譜之間不嚴格的倍頻關系直接影響了螺旋槳軸頻的自動估計,并且信噪比越低,影響也越嚴重。
史思遠等[2]利用邊界元法對船用螺旋槳振動聲輻射進行了計算,得到了螺旋槳在流場中的振動輻射噪聲。殷敬偉等[3]將軸頻及其各次諧波看作一個準周期信號,提取諧波頻率的最大公約數法。童峰等[4]基于模糊理論采用累加處理改善信噪比提出了基于模糊系統的軸頻提取方法。但這些方法線譜的提取精度有很大的依賴性,實際海洋環境噪聲的干擾,線譜幅值變化較大低幅值線譜可能會漏檢,同時還會包含由噪聲等形成的干擾線譜。孫焱[5]提出了多段融合DEMON譜分析方法,由于水聲信號多途干擾和噪聲的存在,DEMON譜中真實線譜在融合后幅值峰值會被削弱,不利于真實線譜的準確提取。孫焱提出了基于幅值加權的水聲目標輻射噪聲線譜檢測方法,相對于未進行幅值加權法,檢測性能得到了提高。鄭恩明等[6]采用了EEMD分解的方法處理艦船輻射噪聲,并進行了特征提取和識別。
在DEMON譜中,即使由于干擾的存在使得調制譜中與軸頻及其諧波相關的線譜不明顯,但總存在著在真實線譜位置出現線譜并趨向于局部峰值的潛在屬性[7-8]。本文提出一種基于能量累積和序列匹配的螺旋槳軸頻自動提取算法,算法首先利用噪聲不同頻段的調制信息利用多頻段融合改進方法對DEMON譜進行線增強,然后利用平均能量累積方法對與螺旋槳軸頻及其諧波相關的線譜進行提取,由于提取的線譜所對應軸頻或諧波次數不明確,最后算法通過序列匹配方法計算線譜對應的諧波次數,從而實現螺旋槳軸頻的自動提取,通過實驗驗證,算法取得了較好效果。
1 多頻帶融合DEMON譜增強
小波變換能在時頻兩維空間上提取信號中的包絡成分,得到反映信號全貌的尺度包絡譜[9],可同時確定水聲信號中是否有調制信息所在的頻帶.因此,為了綜合利用各頻帶的信息,改進DEMON分析方法首先利用小波包將信號在頻域進行劃分,使每一段信號滿足窄帶條件,同時又不能過窄,因為頻域越窄,調制信號能量越小,然后取每一頻帶信號的包絡譜將不同頻帶包絡譜融合累加,得到信號的在全頻帶的包絡譜。
圖1所示為多頻帶融合改進DEMON譜處理框圖,首先利用小波包將目標輻射噪聲分解為n個子帶信號,分別求得n個子帶信號的歸一化DEMON譜,提取每個DEMON譜的線譜,并以線譜根數的平方作為權重,對各子帶DEMON譜進行加權求和,得到水聲目標輻射噪聲信號的改進DEMON譜。該方法以線譜根數的平方作為權重系數,這樣可使線譜多而且明顯的DEMON譜加以重權,同時,對目標輻射噪聲信號多頻段進行DEMON譜分析,可以彌補傳統譜分析丟失線譜的缺點,使最后加權求和得到的改進譜具有更多的線譜,充分利用了信號各個不同頻段的有用信息。
本文利用4階小波包變換對水聲目標輻射噪聲信號進行子帶分解。圖2(a)所示為某艦載聲納系統錄制的實測水聲目標輻射噪聲信號,經小波變換分頻后,其中四個子頻段的歸一化DEMON譜圖,而圖2(b)為融合線譜增強后的DEMON譜,從圖中可以看出,經小波變換后,各個頻帶信號的調制各不相同,而改進的DEMON解調方法充分利用了信號各頻帶的有用信息,能取得較好的解調譜,解調質量更高。
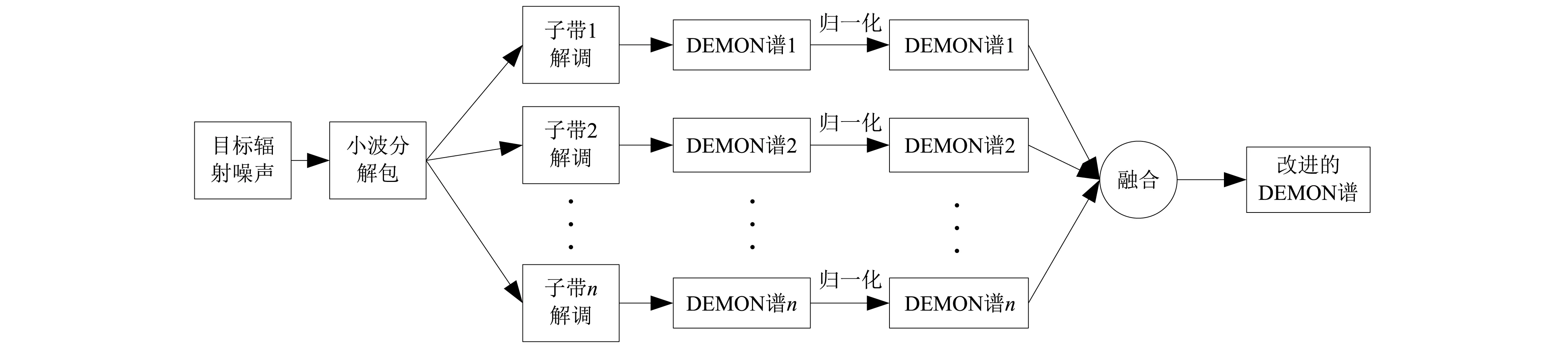
圖1 改進的Demon譜處理框圖Fig.1 The flow diagram of improved DEMON spectrum analysis
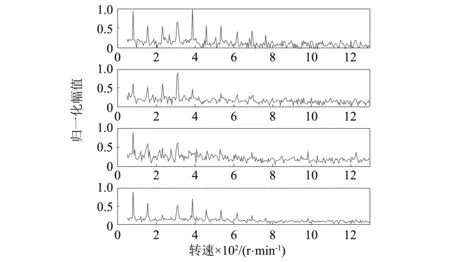
(a)小波變換分頻后的不同頻段DEMON譜
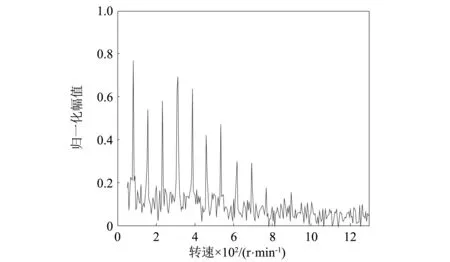
(b)多頻段融合改進DEMON譜圖
2 基于平均累積能量的線譜提取
在理想DEMON譜圖中,呈倍頻關系的線譜頻率最小值即是目標的軸頻,但在實測信號是不現實的,特別是在背景噪聲干擾比較強的低信噪比的情況下,很難確定哪根譜線是希望尋找到的用于判斷軸頻的線譜。
歸一化平均能量累積方法的思想是在DEMON譜中搜索線譜及其倍頻線譜值的平均累積能量最大的線譜頻率,作為螺旋槳軸頻或葉頻。根據軸頻及其諧波的倍數關系,對軸頻頻率fe,計算其倍頻位置fi(fi=i×fe,i=1, 2, …)的鄰域:
Ω=[fi-Δ,fi+Δ]
(1)
式中:Δ=f(fe)為鄰域變量參數,其為fe的函數,判斷Ω內是否存在局部線譜峰值,其中如果存在,則將峰值能量進行累積相加;然后將累加后的能量值除以fe的諧波總數,得到平均累加能量。依次循環計算每一個可能軸頻頻率的平均累積能量,則平均累加能量最大的fe值,即為目標螺旋槳軸頻或某個葉頻(軸頻的倍頻)。
設某子軸頻fsub為
(2)
根據算法描述有
Nfe=N·Nfsub
(3)
軸頻fe與子軸頻fsub的平均累積能量分別為:
(4)
(5)
因為D2(fi)為線譜頻率處的DEMON譜能量,有
D2(fi)>D2(fn)
(6)
因此可得
Efe>Efsub
(7)
即軸頻或葉頻的平均累積能量要大于子軸頻的平均累積能量。

圖3 歸一化平均能量累積方法提取某一線譜Fig.3 Some extracted line spectrum using normalizedaverage energy accumulation method
圖3所示,為每個頻率位置平均能量累積分布,目標艦船為5葉漿,狀態為轉速約78 r/min,從圖中看出,算法在一次平均能量累積判斷時,提取了5倍軸頻的葉頻線譜,結合線譜分布,可以確定該目標的轉速為77.72 r/min。將圖3所示的線譜分布與圖2(b)所示的線譜分布相比較可以發現,盡管圖3所示線譜得到增強且倍頻關系明顯,但由于噪聲干擾和頻譜分析分辨率不足引起的頻率偏移,諧波簇中頻率并不是每個線譜都能得到真實線譜的最佳估計。
3 基于序列匹配的軸頻提取
由于噪聲干擾及線譜分析時頻率分辨率不足等原因,經過平均能量累積得到的螺旋槳諧波線譜頻率,不一定是真實水聲目標螺旋槳軸頻的嚴格整數倍,這對利用軸頻與諧波的倍數關系計算軸頻會帶來不可控制的誤差,因此,本節第2節提取諧波線譜頻率作為初始值,利用脈沖序列匹配方法對得到的諧波軸頻進一步優化估計。
周期信號x(n)的SAMSF函數[10]ξx(m)可以表示為:
(8)
式中:l=mod(n+m,Q),l=mod(n+m,Q),Q為計算ξx(m)的信號幀長度。故實測水聲信號y(n)=x(n)+v(n)的SAMSF函數ξy(m)可以表示為
(9)
從而可以得到不等式:

(10)
通過引入ε(m)≥0,式(9)可以表示為:
ξy(m)=ξx(m)+ξv(m)-ε(m)=
ξx(m)+Γ(m)
(11)
式中:Γ(m)=ξv(m)-ε(m)為由噪聲及其他原因引入的偏差。
指出在各種噪聲下,ξy(m)與ξx(m)的峰值分布是同步的,ξy(m)在ξx(m)的峰值頻率位置有保持其峰值的趨勢[11-12]。即在各種不同的噪聲環境下,含噪信號y(n)的SAMSF函數ξy(m)可以很好的反映未被噪聲干擾信號x(n)的諧波特性,從而可以利用實測含噪聲信號包絡的SAMSF函數ξy(m)來描述信號的諧波特性,利用若干局部極大值頻率估計出ωqopt的諧波階次,進而估計出信號的螺旋槳軸頻。
根據螺旋槳軸頻及其諧波的倍數關系,假定提取的諧波線譜頻率ω可以用來計算一個時域周期:
(12)
對于給定的ω,Ti可以根據不同的諧波階次q而變化,但其與軸頻周期T0保持固有的倍數關系,定義周期為TI=qT的脈沖序列:
(13)
式中:m∈[0, 1, …,ms],δ(m)為Kroneckerδ函數,IT為位脈沖數量;通過改變q進而改變TI,可以找到q的最優值,使得脈沖序列I(m,q)與DEMON譜線譜頻率ξy(m)的真實周期相匹配,定義目標函數,即SAMSF函數加權的脈沖序列:
(14)
由于ξy(m)在T0的整數倍位置會出現局部極大值,因此,使TI與T0同步的q值也會使η(q)為最大值,即qopt的優化值為
(15)
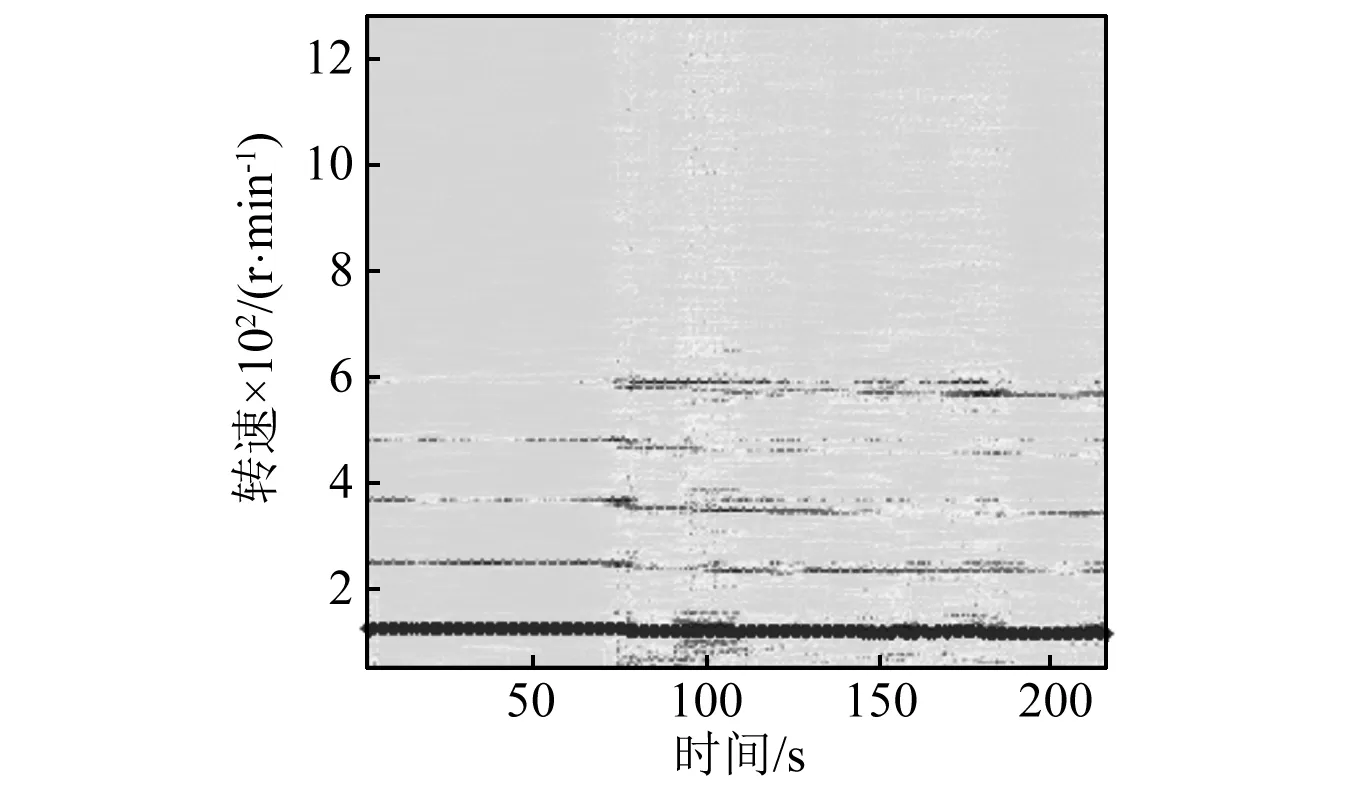
式中:qopt取整型值且滿足(IT-1)(qTqopt) (16) 為驗證本文算法的有效性,實驗選用多艘艦船的實測目標輻射噪聲數據樣本進行算法實驗驗證,其中包括商船樣本50個,護衛艦樣本10個以及包括兩棲攻擊艦、補給艦等多種樣本較少艦型的混合樣本40個。實驗數據采樣率均為fs=44.1 kHz,對平均能量累積方法提取的軸頻初始粗值進行擬合的步長設置為Δω=0.01 π,在進行基于頻域序列諧波次數估計時,脈沖序列數設為Fn=7。實驗時對輸入的水聲目標輻射噪聲信號經濾波,以1 024個采樣點進行絕對值檢波后,對每個頻帶內信號進行分幀,這樣最高分析頻率為21.53 Hz,取每個通道的連續5幀信號進行幀間融合改進DEMON譜計算并提取軸頻。 如圖4、圖5所示為使用本文方法和基于最大公約數的DEMON譜軸頻提取技術方法對水聲目標輻射噪聲提取軸頻的軌跡,圖中黑色點為計算得到的軸頻軌跡。圖4中水聲目標航速17節,轉速約78 r/min;圖5中水聲目標開始時轉速約為121 r/min。從圖中可以看出,與基于最大公約數的DEMON譜軸頻提取方法相比,本文方法能夠穩定且準確地提取目標軸頻。 (17) 軸頻估計值與真值之間的誤差率為: (18) (a)基于最大公約數方法 (b)本文方法圖4 某水聲目標目標在航速17節,轉速78 r/minFig.4 Navigational speed at 17 Knot and rotationalspeed at 78 r/min of some acoustic target (a)基于最大公約數方法 (b)本文方法圖5 某水聲目標在航速17節,轉速121 r/minFig.5 Navigational speed at 17 Knot and rotationalspeed at 78 r/min of another acoustic target 軸頻的均方誤差: (19) 為進一步驗證算法對軸頻提取的精確度,采用式(17)和式(19)兩個指標進行對比,其比較結果如表1所示。 表1 不同方法軸頻提取結果 通過軸頻提取精度比較試驗和軸頻軌跡提取試驗可以看出,本節提出的基于平均能量累積和序列匹配的軸頻提取技術取得了比較好的軸頻提取結果,在實測噪聲受到干擾情況下,通過線譜增強、軸頻估計確保最后的提取結果的準確性和精確性。 本文針對船舶、潛艇等水聲目標螺旋槳軸頻自動提取困難的問題,提出了一種基于能量累積和脈沖序列匹配的螺旋槳軸頻自動提取算法,該算法在利用多頻段融合改進方法對輻射噪聲DEMON譜線譜增強的基礎上,利用平均能量累積方法提取螺旋槳軸頻或其諧波相關的線譜,通過序列匹配方法計算線譜的諧波次數,從而實現螺旋槳軸頻的自動提取。最后,利用實測水聲目標輻射噪聲數據對該算法進行了試驗,結果表明,文中算法比基于最大公約數的DEMON譜軸頻提取方法在軸頻提取的精確性和穩定性上都取得了較好的效果。4 實驗驗證



5 結 論
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國生殖健康(2019年3期)2019-02-01 06:12:26
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56