適于時(shí)變幅值分析的直升機(jī)黏彈減擺器模型
2018-09-04 01:58:46吳靖胡國才劉湘一
北京航空航天大學(xué)學(xué)報(bào) 2018年8期
吳靖, 胡國才, 劉湘一
(海軍航空大學(xué) 航空基礎(chǔ)學(xué)院, 煙臺 264001)
結(jié)構(gòu)簡單、重量較輕、易于維護(hù)及可靠性強(qiáng)的黏彈減擺器現(xiàn)廣泛應(yīng)用于無鉸式、無軸承式及星型柔性旋翼直升機(jī)槳葉減擺。黏彈減擺器的非線性特性對直升機(jī)旋翼/機(jī)體耦合動穩(wěn)定性影響較大,而耦合系統(tǒng)的非線性動穩(wěn)定性分析一般采用時(shí)域分析法,因此建立一種能用于直升機(jī)旋翼/機(jī)體耦合非線性動穩(wěn)定性時(shí)域分析的黏彈減擺器模型尤為重要。
直升機(jī)動力學(xué)研究中常用的黏彈減擺器模型有VKS(Voigt-Klevin)模型[1-3]、ADF(Anelastic Displacement Fields)模型[4-7]和遲滯非線性模型[8-11]等。在直升機(jī)旋翼/機(jī)體耦合動穩(wěn)定性分析中,一般對黏彈減擺器進(jìn)行線性化處理后采用特征分析法:Gandhi和Chopra[12]對黏彈減擺器線性化處理后,分析了其對直升機(jī)懸停空中共振的影響;筆者課題組[13]采用線性化的VKS模型分析了黏彈減擺器對直升機(jī)前飛空中共振的影響;王波等[14]采用線性化的VKS模型分析了黏彈減擺器的不同連接方式對直升機(jī)地面共振的影響。而在保留黏彈減擺器非線性情況下進(jìn)行直升機(jī)旋翼/機(jī)體耦合動穩(wěn)定性分析的研究較少,王波等[15]將基于復(fù)模量的非線性VKS模型用于直升機(jī)空中共振時(shí)域分析;衛(wèi)麗君等[16]則將該方法用于分析黏彈減擺器不同連接方式對直升機(jī)空中共振的影響。但基于復(fù)模量識別的非線性VKS模型不能很好地預(yù)估時(shí)域響應(yīng),而基于時(shí)域響應(yīng)識別的VKS模型卻難以描述其幅變特性[2]。
為了適用較寬的動幅值范圍,黏彈減擺器一般引入動幅值變量[11],但很難將其用于幅值變化的直升機(jī)旋翼/機(jī)體耦合動穩(wěn)定性時(shí)域分析。為解決上述問題,對動幅值參量進(jìn)行改進(jìn),并將改進(jìn)后的黏彈減擺器模型用于直升機(jī)地面共振非線性時(shí)域分析,驗(yàn)證上述方法的可行性。
1 黏彈減擺器改進(jìn)模型
現(xiàn)有的黏彈減擺器模型為了適用于寬的動幅值范圍,一般在模型中引入動幅值參量δ,如式(1)所示一種雙線性遲滯模型,在周期激振x=x0+δcos(ωt)作用下(x0為靜位移,ω為響應(yīng)頻率,t為時(shí)間),黏彈減擺器恢復(fù)力表示為
(1)

其中:xs為滑移極限位移;ks=zs/xs為滑移線性剛度,zs為滑移極限恢復(fù)力。
黏彈減擺器的復(fù)模量經(jīng)推導(dǎo)可得
(2)
式中:G′和G″分別為儲能模量和耗能模量。
在直升機(jī)旋翼/機(jī)體耦合動穩(wěn)定性時(shí)域分析中,減擺器響應(yīng)的動幅值一般是變化的,而減擺器剛度會隨動幅值變化而變化,這就導(dǎo)致頻率也是變化的,采用類似上述包含動幅值及頻率參量的模型難以進(jìn)行時(shí)域分析,需要進(jìn)行改進(jìn)。
1.1 單頻激振條件
減擺器在收斂、中性穩(wěn)定和發(fā)散3 種情況下受到擾動后的時(shí)域響應(yīng)如圖1所示。
減擺器等效線性化后,其響應(yīng)可表示為
x=x0+δ0e-ξωntsin(ωdt+φd)
(3)

(4)
其中:Ib和Sb分別為槳葉對擺振鉸的慣性矩和靜矩;kb為除減擺器外的擺振剛度;e為擺振鉸外伸量;Ω為旋翼轉(zhuǎn)速;Rd為擺振鉸至減擺器距離。
由式(3)可知,響應(yīng)振動幅值可表示為
(5)
擺振阻尼較大時(shí),響應(yīng)很快衰減,沒有振蕩特性,故暫針對小阻尼情況進(jìn)行研究。此時(shí),響應(yīng)振動幅值可近似表示為
(6)
圖1中所示的點(diǎn)線即為采用式(6)計(jì)算的振動幅值,結(jié)果說明了式(6)計(jì)算的準(zhǔn)確性。
將式(6)代入式(1)即可消除黏彈減擺器模型中的動幅值及頻率參量。
1.2 雙頻激振條件
直升機(jī)前飛或滑跑時(shí),槳葉擺振面由于存在1Ω的哥氏力矩作用,將產(chǎn)生1Ω的強(qiáng)迫振動響應(yīng)作用于減擺器。因此,黏彈減擺器受到擾動后實(shí)際上是處于雙頻激振條件下,其動態(tài)響應(yīng)可表示為
(7)
式中:xΩ為強(qiáng)迫振動位移;δΩ為強(qiáng)迫振動幅值;φΩ為強(qiáng)迫振動初始相位角。
1Ω強(qiáng)迫振動在擺振阻尼較小的情況下,強(qiáng)迫振動幅值可表示為
(8)
式中:Mc為哥氏力矩幅值。
此時(shí),擾動響應(yīng)振動幅值δd可表示為
(9)
完整響應(yīng)振動幅值可表示為
(10)
式(10)中頻率是作用于速度項(xiàng),因此將其表示成關(guān)于強(qiáng)迫振動和擾動運(yùn)動速度幅值比的指數(shù)函數(shù)。當(dāng)δΩ=0時(shí),即沒有強(qiáng)迫振動的情況下,式(10)與式(6)相同,表示單頻條件下的振動幅值。
在1.1節(jié)單頻激振條件的基礎(chǔ)上疊加頻率為6 Hz、幅值為1 mm的強(qiáng)迫振動,3種情況下的響應(yīng)如圖2所示,圖中實(shí)線表示位移,采用式(10)計(jì)算的幅值如點(diǎn)線所示。
由圖2可以看出,式(10)所計(jì)算的幅值曲線較好地反映了雙頻條件下黏彈減擺器響應(yīng)幅值在時(shí)域上的變化趨勢。

因?yàn)榉涤?jì)算需要頻率參數(shù),而頻率又受幅值的影響,因此初始幅值用初始位移與靜位移差值的絕對值|xt=0-x0|代替。
2 計(jì)入黏彈減擺器的地面共振分析
2.1 計(jì)入黏彈減擺器的地面共振模型
黏彈減擺器安裝在旋翼上主要用于提高槳葉擺振阻尼,計(jì)入黏彈減擺器作用后的直升機(jī)地面共振當(dāng)量平面模型為
(11)
2.2 仿真分析主要參數(shù)
某型黏彈減擺器經(jīng)識別后所得的參數(shù)為:a1=-0.346 2,a3=-5.087,a5=-57.83,p=0.798 2 mm,k1=307.6 N/mm,k3=11.76 N/mm3,k5=-0.046 8 N/mm5,b=3.103,q=1.367 mm,ce=541.8 N/mm,zs=505.6δN,xs=0.234 8δmm。
采用式(2)對靜位移為6 mm時(shí),不同動幅值下黏彈減擺器的復(fù)模量進(jìn)行計(jì)算,并與實(shí)驗(yàn)值對比,結(jié)果如圖4所示。
由圖4可知,采用本文黏彈減擺器雙線性遲滯模型計(jì)算的復(fù)模量與實(shí)驗(yàn)值吻合較好,證明了該模型的準(zhǔn)確性。后續(xù)也將采用靜位移為6 mm狀態(tài)下的黏彈減擺器特性進(jìn)行計(jì)算。
某型直升機(jī)旋翼及機(jī)體的主要參數(shù)如表1所示,除減擺器外的擺振剛度及阻尼較小,可以忽略不計(jì),即kb=cb=0。
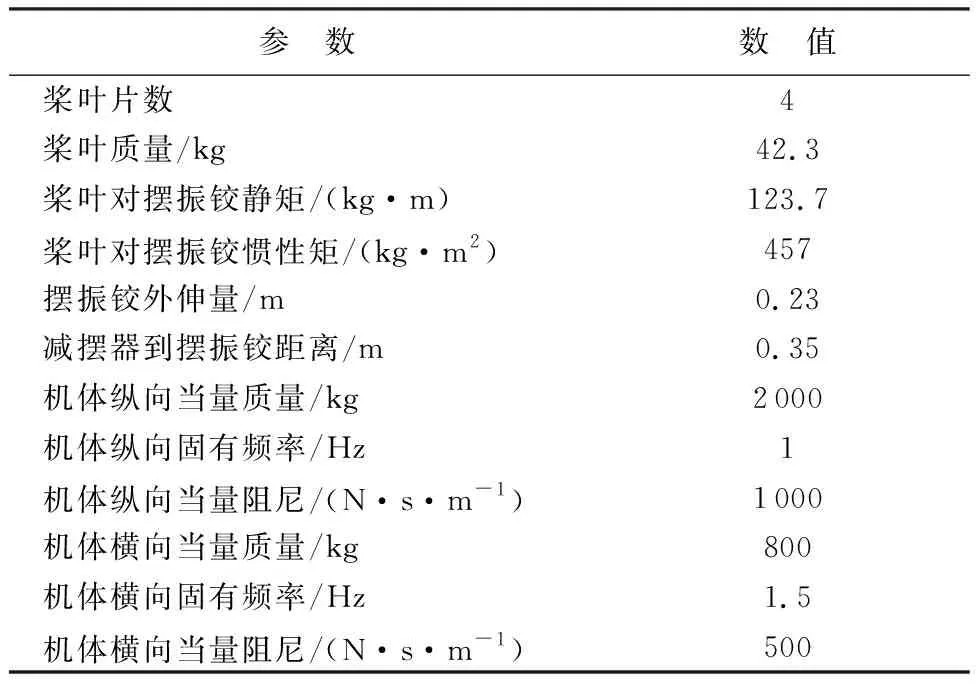
參 數(shù)數(shù) 值槳葉片數(shù)4槳葉質(zhì)量/kg42.3槳葉對擺振鉸靜矩/(kg·m)123.7槳葉對擺振鉸慣性矩/(kg·m2)457擺振鉸外伸量/m0.23減擺器到擺振鉸距離/m0.35機(jī)體縱向當(dāng)量質(zhì)量/kg2000機(jī)體縱向固有頻率/Hz1機(jī)體縱向當(dāng)量阻尼/(N·s·m-1)1000機(jī)體橫向當(dāng)量質(zhì)量/kg800機(jī)體橫向固有頻率/Hz1.5機(jī)體橫向當(dāng)量阻尼/(N·s·m-1)500
2.3 地面共振仿真分析
旋翼擺振后退型模態(tài)在直升機(jī)地面共振分析中較為重要,為分析旋翼擺振后退型模態(tài),首先需要通過對槳葉擺振方向以擺振固有頻率施加激振力矩的方式激出旋翼的擺振后退型模態(tài)。由圖4可知,黏彈減擺器在不同動幅值下具有不同的復(fù)模量,因此采用的激振力矩需要使得激出的槳葉擺振幅值(減擺器振動幅值)與激振頻率(減擺器儲能模量)符合圖 4中的復(fù)模量曲線。根據(jù)強(qiáng)迫振動理論[17]可估計(jì)需要的激振力矩幅值Mr為
(12)
黏彈減擺器取不同動幅值下的復(fù)模量確定激振頻率,采用式(12)確定激振力矩幅值,激出不同轉(zhuǎn)速下旋翼的擺振后退型模態(tài)后,確定模擬出的減擺器響應(yīng)幅值如圖5所示。
由圖5可知,模擬出的減擺器響應(yīng)幅值δr與最初選擇的振動幅值(理論值)基本吻合,雖然個別點(diǎn)由于旋翼擺振后退型模態(tài)與機(jī)體運(yùn)動模態(tài)耦合引起的誤差稍大,但最大誤差仍不超過6%,證實(shí)了采用式(12)確定激振力矩幅值的可行性。
選取動幅值分別為0.5、2和6 mm的3種情況下對應(yīng)的復(fù)模量狀態(tài),針對黏彈減擺器線性化(復(fù)模量取常值)的情況,在激出旋翼擺振后退型模態(tài)后,采用基于多槳葉坐標(biāo)變換的阻尼識別法[18]對瞬態(tài)響應(yīng)進(jìn)行模態(tài)阻尼識別,并與采用特征值法計(jì)算的模態(tài)阻尼進(jìn)行對比,具體結(jié)果如圖6所示,圖中BX和BY分別表示機(jī)體的縱橫向運(yùn)動模態(tài),RL表示旋翼擺振后退型模態(tài),fm和σ分別為模態(tài)頻率和模態(tài)阻尼。
由圖6可知,在黏彈減擺器取不同復(fù)模量的情況下,通過阻尼識別所得的模態(tài)阻尼與采用特征值法計(jì)算所得的模態(tài)阻尼基本吻合,說明所采用的基于多槳葉坐標(biāo)變換的阻尼識別法的有效性。由圖中還可以看出,在旋翼擺振后退型模態(tài)與機(jī)體模態(tài)耦合時(shí),激出旋翼擺振后退型響應(yīng)的同時(shí)也激出了機(jī)體響應(yīng),使得所識別的擺振后退型模態(tài)阻尼誤差稍大。
以旋翼轉(zhuǎn)速Ω=300 r/min為例,取黏彈減擺器響應(yīng)幅值δ=6 mm時(shí)的儲能模量確定激振頻率,以此激振頻率激出系統(tǒng)的擺振后退型模態(tài)后,計(jì)算黏彈減擺器線性化(復(fù)模量取常值)和非線性2種情況下的瞬態(tài)響應(yīng),由于各槳葉減擺器響應(yīng)僅存在相位差的區(qū)別,因此只給出第1個減擺器的位移時(shí)域響應(yīng)和功量圖,如圖7、圖8所示。
由圖7可以看出,與黏彈減擺器線性化的響應(yīng)相比,在保留減擺器非線性的情況下,其響應(yīng)衰減得更快,且振動頻率更大。據(jù)分析可知,是衰減過程中減擺器阻尼及剛度隨響應(yīng)幅值的減小而增加引起的。
由圖8可見,保留黏彈減擺器非線性的功量圖與線性化后差異較大,說明在進(jìn)行黏彈減擺器載荷計(jì)算時(shí)不能忽略其非線性的影響。
旋翼擺振后退型模態(tài)響應(yīng)ζRL如圖9所示,采用阻尼識別法對旋翼擺振后退型模態(tài)阻尼進(jìn)行識別,其隨時(shí)間的變化如圖10所示。
由圖10可知,由于減擺器非線性的影響,在響應(yīng)衰減的過程中,隨著黏彈減擺器振動幅值的減小,其耗能模量增加,使得槳葉的擺振阻尼增加,旋翼擺振后退型模態(tài)阻尼在時(shí)域上呈增加趨勢,減擺器線性化后,擺振后退型模態(tài)阻尼保持不變,這也就是圖9中保留減擺器非線性后,旋翼擺振后退型響應(yīng)衰減的更快的原因。
據(jù)分析,在圖4所示的黏彈減擺器非線性條件下,系統(tǒng)初始穩(wěn)定能確保整個過程的穩(wěn)定。結(jié)合圖6的結(jié)果可知,減擺器受到的擾動越大,旋翼擺振后退型模態(tài)阻尼越小,情況越危險(xiǎn)。因此,在地面共振試驗(yàn)或理論分析中應(yīng)該重點(diǎn)關(guān)注大擾動下系統(tǒng)初始階段的響應(yīng)及其模態(tài)阻尼。
3 結(jié) 論
1) 針對小擺振阻尼比的情況,給出了單頻及雙頻條件下黏彈減擺器模型中動幅值參量的計(jì)算方法,采用該方法計(jì)算系統(tǒng)在收斂、中性穩(wěn)定及發(fā)散3種情況下的幅值曲線能較好地反映響應(yīng)幅值在時(shí)域上的變化趨勢,說明該方法可使帶動幅值參量的黏彈減擺器模型用于直升機(jī)旋翼/機(jī)體耦合動穩(wěn)定性時(shí)域分析。
2) 給出了計(jì)入非線性黏彈減擺器后,激出旋翼擺振后退型模態(tài)所需激振力矩的計(jì)算方法,在不同轉(zhuǎn)速不同復(fù)模量狀態(tài)下,采用該方法確定的激振力矩對槳葉進(jìn)行激振激出的響應(yīng)幅值與預(yù)期值誤差不超過6%,說明了所述方法的準(zhǔn)確性。
3) 將改進(jìn)后的黏彈減擺器模型用于直升機(jī)地面共振時(shí)域分析,對擺振后退型響應(yīng)進(jìn)行分析可知,系統(tǒng)穩(wěn)定時(shí),與線性化結(jié)果相比,計(jì)入黏彈減擺器非線性后,旋翼擺振后退型響應(yīng)衰減更快,其模態(tài)阻尼在時(shí)域上呈增加趨勢。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
湖北經(jīng)濟(jì)學(xué)院學(xué)報(bào)·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機(jī)學(xué)院學(xué)報(bào)(2015年4期)2015-02-28 14:30:00
計(jì)算物理(2014年2期)2014-03-11 17:01:44
