重型商用車AMT坡度及載重識別策略
2018-09-10 04:30:47韓偉
牡丹江師范學院學報(自然科學版) 2018年3期
韓偉
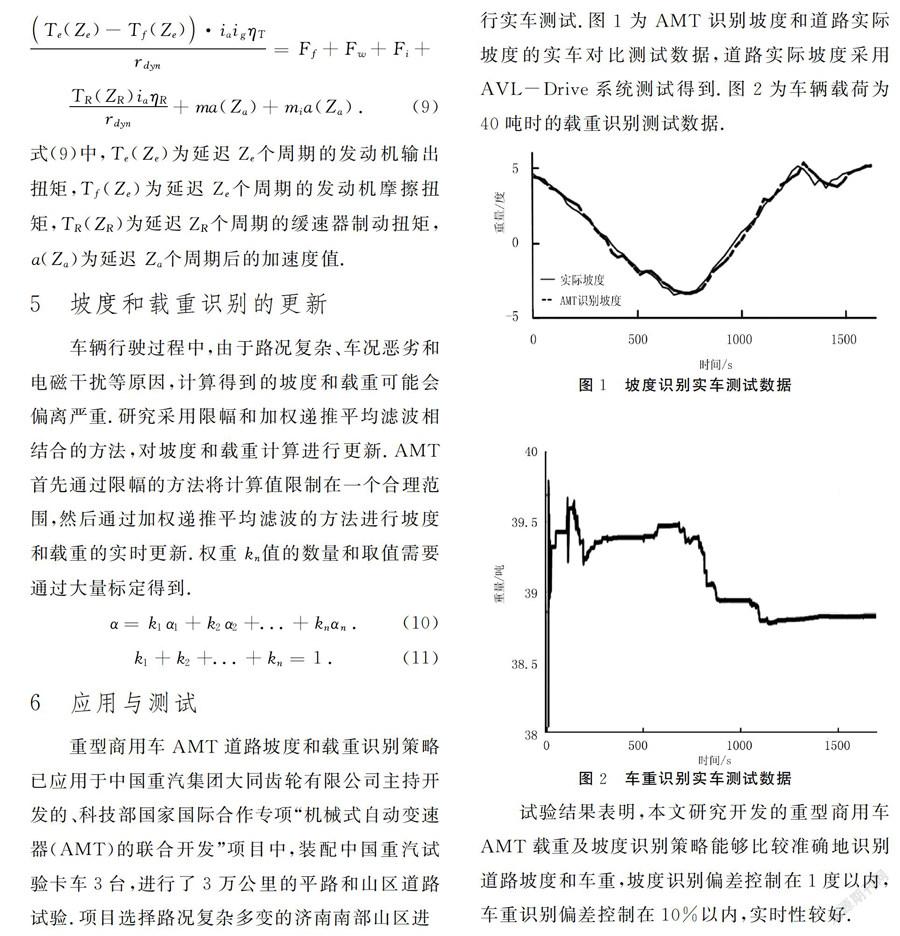
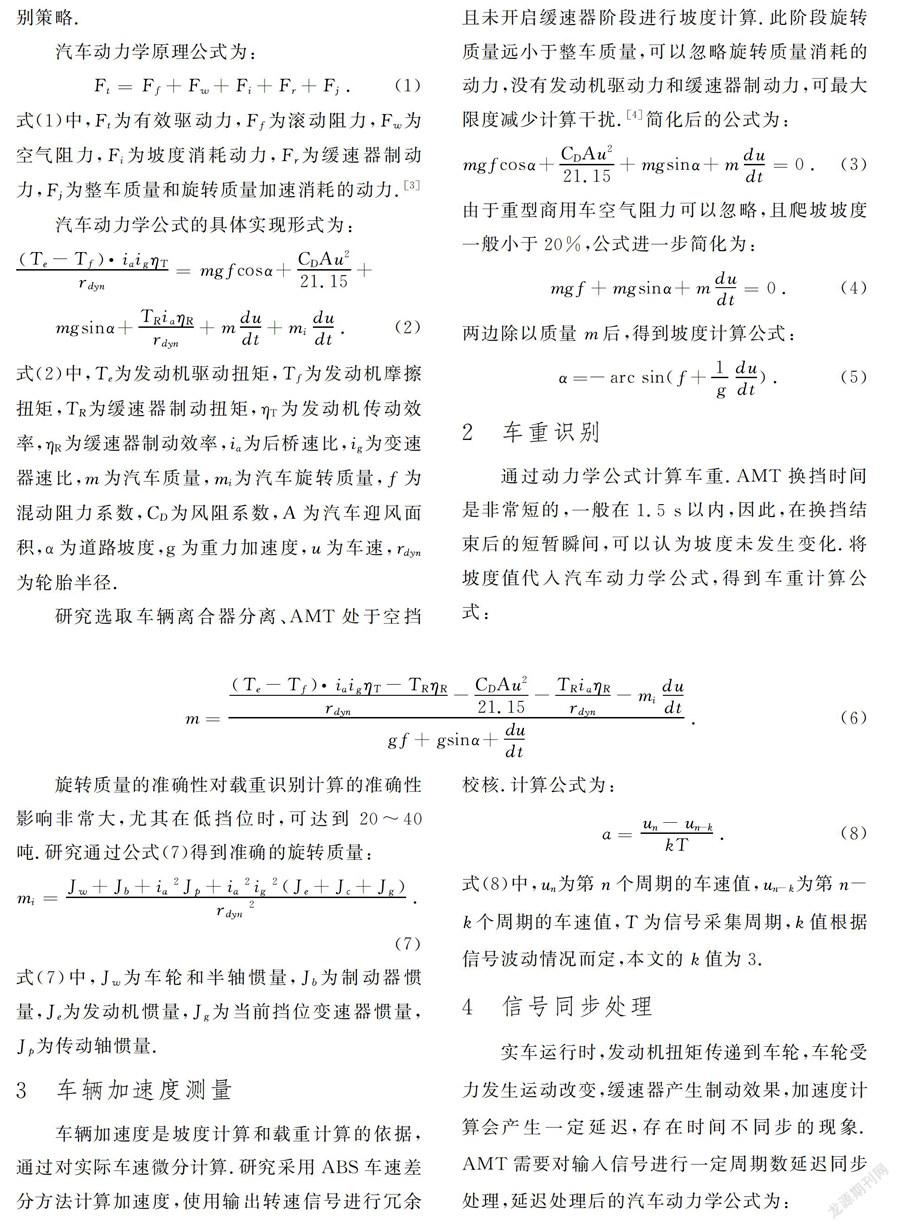
摘 要:提出基于汽車動力學原理的重型商用車AMT自動變速器坡度和載重識別策略.策略能夠根據(jù)車輛狀態(tài),智能識別道路坡度和車重.道路試驗表明,該策略的坡度識別偏差控制在1度以內(nèi),車重識別偏差控制在10%以內(nèi),實時性較好.
關鍵詞:坡度識別;載重識別;AMT;汽車動力學
[中圖分類號]O369 [文獻標志碼]A
Abstract:Road slope and vehicle mass are the basis for AMT automatic transmission shift for heavy duty commercial vehicles. A road slope and vehicle mass recognition strategy of AMT automatic transmission based on vehicle dynamics was introduced, which can intelligently identify the road slope and vehicle mass based on current vehicle status. Road test shows that, slope deviation is controlled within 1 degree, mass deviation is controlled within 10%, and the real-time performance is good.
Key words:slope recognition; vehicle mass recognition; AMT; vehicle dynamics
電控機械式自動變速器(AMT)具有燃油經(jīng)濟性好、傳動效率高、成本低和生產(chǎn)繼承性好等優(yōu)勢,是適合中國國情的重型商用車自動變速器.重型商用車行駛過程中,需要AMT控制器識別車輛載重和道路坡度,從而確定合適擋位.我國市場上量產(chǎn)的AMT在道路坡度劇烈變化和車輛非標載情況下,往往無法實時且準確地識別坡度和載重,從而出現(xiàn)循環(huán)換擋、動力性差和燃油經(jīng)濟性差等現(xiàn)象.[1\]本文提出一種重型商用車AMT坡度識別和載重識別策略,能夠?qū)崟r識別當前道路坡度和車輛載重,解決國內(nèi)量產(chǎn)AMT存在的問題.
參考文獻
[1] 王玉海,宋健,李興坤. 駕駛員意圖與行駛環(huán)境的統(tǒng)一識別及實時算法[J].機械工程學報,2006,42(4):206-212.
[2] Wulrtenberger M,Germann St,Isermann R.Modeling and parameter estimation of nonlinear vehicle dynamics[J] .American Society of Mechanical Engineers,Dynamic Systems and Control Division (Publication) DSC,1992,44:53-63.
[3] 余志生.汽車理論[M].北京:機械工業(yè)出版社,2006.
[4] 金輝,葛安林,秦貴和,等. 基于縱向動力學的坡道識別方法研究[J].機械工程學報,2002,38(1):79-86.
編輯:琳莉
