基于地理信息的無人機低空公共航路規劃研究
2018-09-10 18:36:56廖小罕徐晨晨岳煥印
無人機 2018年2期
關鍵詞:規劃
廖小罕 徐晨晨 岳煥印
低空是無人機主要活動空域,隨著無人機商業化應用快速發展,無人機飛行活動陡增。近幾年國外針對無人機應用發展提出了劃設低空無人機專用空域的構想,我國也有類似的倡議。但是對于如何高效利用低空空域資源卻缺乏進一步的研究。中國科學院地理科學與資源研究所正在開展的基于地理信息技術構架的無人機低空公共航路規劃方案,可快速、低成本緩解空域需求矛盾,促進無人機應用有序發展。無人機低空航路與民航、通航航路不同,既要與二者銜接,也要針對無人機特點,充分利用和融合已有的地面資源和設施。本文提出的無人機低空航路是指在有人駕駛航空器最低飛行高度以下,預先規劃具有一定寬度專供無人機飛行的公共空中通道。無人機實際飛行的路線稱為航線,在航路中飛行的無人機,其航線就是航路的中心線。本文介紹的無人機低空航路規劃包括無人機空港優化布局、低空空域環境構建和路徑搜索與優化等技術。無人機低空航路的應用可以規范低空日益增加的無人機交通流,確保航空和公共安全。本文研究方法和進一步深化的成果可為空域管理部門、各類無人機云管理系統、無人機飛行操控者的航路規劃提供重要參考,是無人機管控的重要基礎手段。
無人機航路的基本屬性
等級體系
按照無人機低空航路的定位和服務,建議劃分為四級:低空骨干航路、低空主干航路、低空支線航路和低空末端航路。其中,低空骨干航路是指連接首都與各省、自治區、直轄市首府的航路,連接各大經濟中心、港站樞紐、商品生產基地和戰略要地的航路。其主要特點是:連接全國,具有全國政治、經濟地位;在全國范圍內便捷可達。
低空主干航路是指具有全省性政治、經濟意義的省級低空航路。其主要特點是:省際間交通。
低空支線航路是指連接區域的低空航路,主要承載無人機空港與骨干/主干航路間的聯系,或布設在復雜地形區域(如山區、人口稀疏區等)的低空航路。其主要特點是:提供區域間、山區及人口稀疏區等特殊區域間交通。除了長距離飛行,無人機還需通過末端航路與終端用戶發生聯系,解決“最后一公里”運營問題。
低空末端航路是指連接支線到終端用戶或者一個終端用戶到另一個終端用戶的航路,主要承載無人機從支線航路到物流、餐飲投遞等終端服務點/站的聯系。其主要特點是:為偏遠區域或山區物流貨運、城市辦公區或者居住區便捷社區服務等。
空間形狀
為簡化航路建模,將航路設置為圓柱體,而圓柱體的中心線即為航線。航線由多條航段構成。航線(航段)在三維空間中的表達和定位通過起點和終點、航線角和高度等因素確定,而航路的三維表達則是在以上因素基礎上增加航路寬度因素。航線角是指從航線起點的經線北端順時針到航線去向的角度,范圍為0·~360·。
航路寬度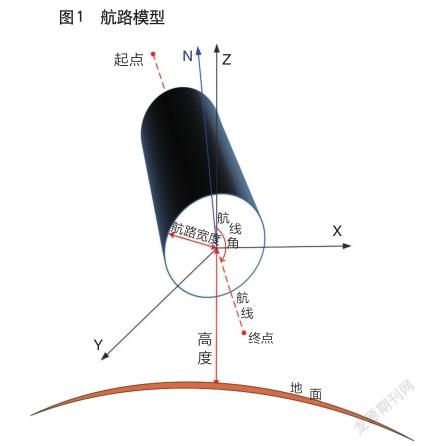
無人機在飛行中需要嚴格沿航線飛行,即無人機縱軸前方延長線的方向(航向)需要與航線角重合。但飛行途中會受到一些內在或外部環境因素影響,從而不可避免地偏離航線,比如受到無人機性能的影響、氣象條件(如風切變)影響。為使無人機的航跡始終保持在航線上,除了無人機自身調控外,研究通過設置航路寬度來實現距離冗余以保證無人機在航路內安全飛行。不同等級航路的寬度不一樣。全國骨干航路最寬,末端航路最窄。
航路最低安全高度
航路最低安全高度是為保障無人機在航路中的安全飛行而提出,由無人機管制相關規定、無人機性能、任務以及飛行環境等確定。參考民航規定,無人機航路的最低安全高度等于航路范圍內的最大標高加上最小超障裕度。最大標高是指航路范圍內地物的最高高程,最小超障裕度是指無人機超越障礙時所應保證的最小垂直間隔,影響因素包括可能造成高度偏差的氣象條件、儀表誤差和無人機性能等。
航路間隔和飛行間隔
航路間隔是指兩條相鄰航線之間的距離;飛行間隔是無人機基于時間或空間的距離,分為水平間隔和垂直間隔,其中水平間隔又分為側向間隔和縱向間隔,飛行側向間隔是指兩架無人機在相鄰航路同一高度層的水平距離;飛行縱向間隔是指處在同一航路同一高度層的無人機沿航向的距離,與無人機的儀表誤差、機載防撞參數有關。為保證無人機的飛行安全,航路間隔必須大于飛行側向安全間隔與航路寬度之和(見圖3)。因此,航路間隔由無人機的飛行安全間隔決定。影響飛行間隔的因素主要包括:(1)無人機的通信、導航、任務載荷性能及其干預能力均對飛行安全間隔影響甚大;(2)自然環境對無人機的飛行安全產生非常重要的影響,比如積冰會導致機翼的氣動性變差,風切變會影響無人機的飛行姿態等;(3)航路結構復雜度和交通流密度的增加會加大無人機飛行碰撞風險。因此,在某一時間點某個空域的無人機數量應該得到控制。
無人機航路設計的基本流程
本文的研究工作按照“構建本底數據庫——無人機空港布局優選——無人機低空飛行空域環境構建——無人機低空航路生成及優化”的總體技術路線,先進行全國無人機空港的優選與布局,然后采用多級布設原則構建無人機低空多級航路網絡體系,實現無人機低空多級航路構建的初步構想。本文主要介紹無人機航路設計總體技術路線的實現過程和演示性成果,沒有考慮三維的情況,假設飛行都在地面移動通信網信號覆蓋的合理高度如300米。航路規劃主要包括以下六個部分:
構建低空航路規劃本底數據庫
劃設無人機在幾百米為上限的低空空域飛行的優勢是規避有人駕駛航空器,減少對有人駕駛航空器的干擾和碰撞風險。但是,地面的因素可能會給低空超視距飛行帶來航空和公共安全隱患,因此,在進行低空航路規劃時需要大量精準地理空間數據及社會經濟數據等基礎數據支撐,構建一個航路規劃本底數據庫。該數據庫不僅包含地面道路分布、通信環境、地形條件、涉及人類活動的禁飛區、限制區以及潛在的危險區等靜態數據,還應包括未知威脅信息以及嚴重影響無人機飛行活動的動態變化數據,以支持無人機飛行路徑的重規劃。本文優先考慮低空氣候(風切變、雷暴、積冰、低能見度天氣等)約束、通信約束和限制區約束。
無人機空港布局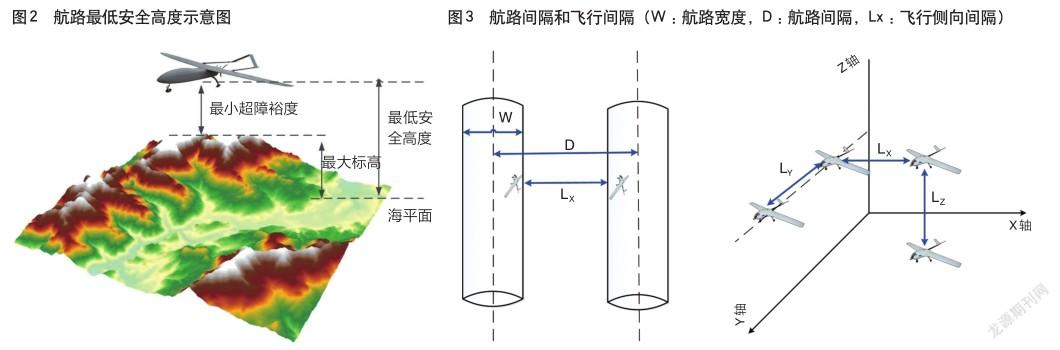
“無人機空港”或者“無人機驗證場”一詞最早在我國無人機遙感應用領域提出。無人機空港是指擁有合法空域的無人機機場和有關服務設施構成的有機整體,硬件設施主要包括無人機跑道、無人機機庫、無人機組裝調試區,導航通信設施等,軟件設施主要包括飛行監管系統、空管協同通報系統等。無人機空港是無人機低空航路與地面的樞紐,可作為無人機的起降點和中轉場地,為無人機的安全飛行提供保障。結合當前依托國家生態觀測研究試驗網開展無人機驗證場和無人機組網科學實驗的基礎,本文擬根據中科院在全國272個野外科學實驗臺站的布局數據,結合各省會城市、區域經濟中心城市或交通樞紐城市位置分布,選擇一批野外臺站定義為無人機空港,在此基礎上構建連接各無人機空港的無人機低空航路,形成全國無人機科學實驗低空航路網,作為全國無人機低空骨干航路原型,達到演示全國無人機低空航路構建過程的目的。
航線連接與優化
初步設計的無人機航路網局限于無人機空港對,未考慮交叉節點對航路的影響,存在飛行安全隱患,無法滿足實際飛行要求。因此應采用合適的優化算法對其進行優化和調整。如合并臨近無人機空港,調整共線航路、交叉航線和低利用率航路,以及調整航路網絡非直線性等。
構建空域環境
研究采用柵格法建立無人機低空飛行空域環境。首先將空域環境劃分為大小相同的矩形空間,然后根據柵格內是否包含限制區、惡劣氣候多發區、機場凈空保護區和基站信號覆蓋區,將柵格分為障礙柵格和自由柵格。自此,空域環境由自由柵格和障礙柵格構成,并形成一個連通圖,因而航路規劃問題就轉化成對自由柵格的規劃問題,即在該連通圖上尋找從起始柵格到終點柵格的規避障礙物的最優路徑。
路徑搜索
構建空域環境后,采用搜索算法進行最優路徑搜索,得到無人機空港對之間的最優航路。路徑搜索原則包括:(1)避開障礙物;(2)在移動通信基站信號覆蓋范圍內;(3)路徑最短或者耗時最短;(4)沿地面路網搜索。
航路優化
無人機航路除了安全性要求外,還需滿足無人機的動力學轉彎速率,即航路上任意一點上的曲率必須小于無人機可達到的最大曲率。研究采用FrenetSerret(FS)坐標系定義無人機運動,在二維平面內曲率定義為路徑的轉彎半徑。因此,為了滿足無人機的動力學約束,設計航路時需要考慮現有無人機的最小轉彎半徑等機動性參數。
案例應用分析
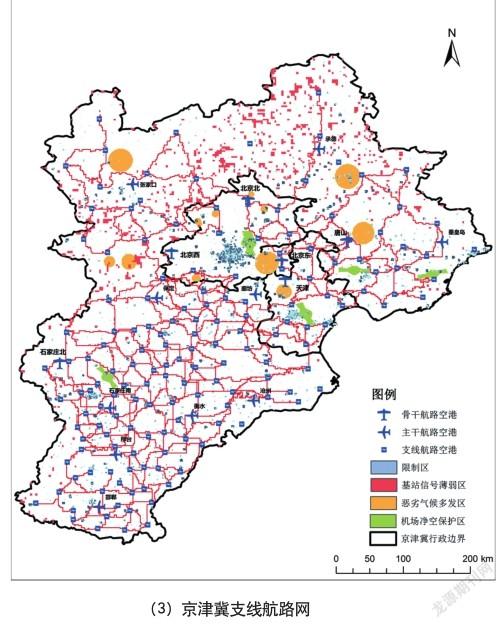
根據各級航路的職能區分,全國骨干航路網在整個航路網絡中起著舉足輕重的作用,京津冀承擔著政治和經濟中心的重要職能。因此,本文以全國骨干航路網和京津冀多級航路網為例,進行全國骨干航路網和京津翼多級航路網規劃。
本研究結合《“十三五”現代綜合交通運輸體系發展規劃》,在北京、上海、廣州、成都、昆明、烏魯木齊、哈爾濱、西安、鄭州、武漢、大連、廈門等12個國際性綜合交通樞紐的地區,依托中科院野外臺站作為無人機骨干航路的主要空港,將其他野外臺站作為航路沿途的輔助空港。假設這些無人機主要空港承擔著全國無人機物流集散、中轉等綜合服務功能,據此通過輸入約束條件,優化計算出通達全國的無人機低空交通中樞(見圖4);選擇京津冀地區的北京、天津、石家莊、唐山、秦皇島、邯鄲、張家口、承德、保定、滄州、衡水、邢臺和廊坊等13個地區綜合交通樞紐的區域內,依托中科院野外臺站或選擇行政中心地帶作為無人機空港,構建京津冀地區的無人機骨干和主干航路空港。此外,選擇以京津冀地區的縣級市中心地帶或交通樞紐附近,建設各地區的無人機支線航路網空港。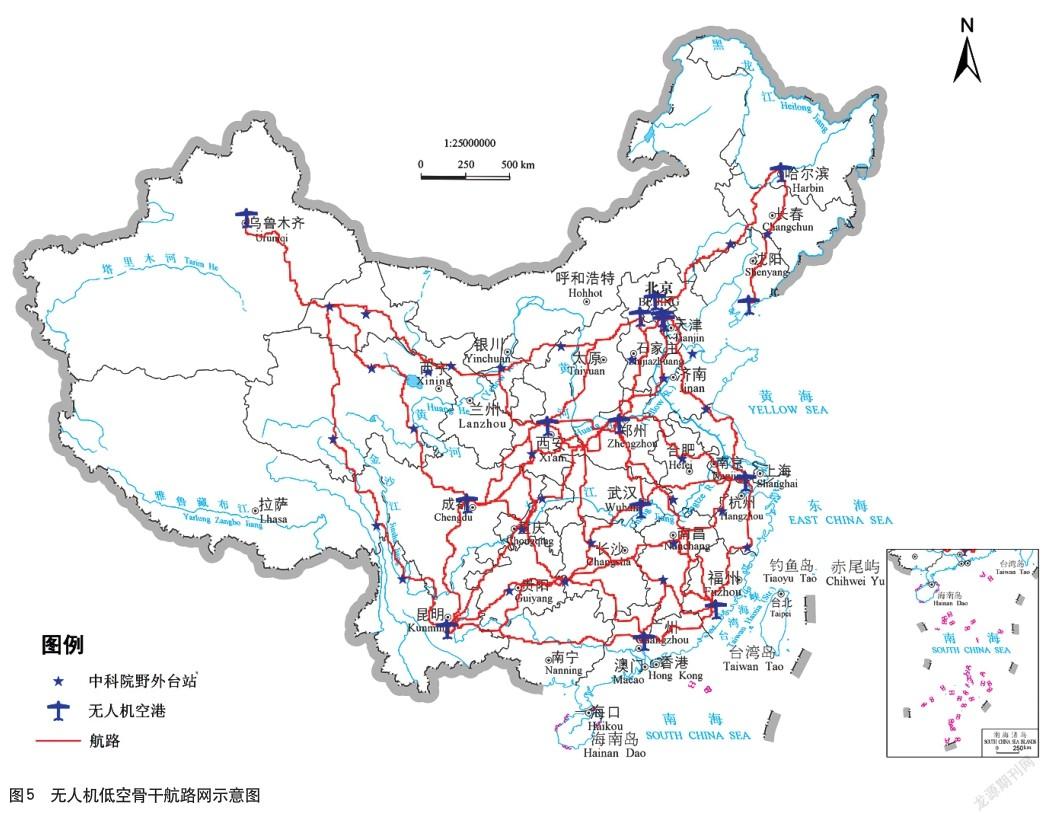
基于無人機低空航路規劃基本流程,考慮在氣象約束、通信約束、限制區約束和機場凈空保護區約束條件下進行無人機航路規劃。氣象約束條件主要包括風切變、積冰、雷暴和低能見度天氣;在假設有人區通信狀況良好的情況下(假設北京和天津全境基站信號覆蓋良好),通信約束環境僅考慮無人區的基站覆蓋情況,因此,通信空域環境由人口分布和基站信號覆蓋數據綜合得到;限制區主要考慮地市級以上的重要政府機關、火車站、客運站、港口碼頭、公安局和高層大廈的分布;機場凈空保護區根據《民用航空機場障礙物限制面保護范圍數據》得到。為簡化計算,以上約束條件均轉化為航路規劃空域環境中的“障礙物”,在路徑搜索中實行“規避”原則。構建全國和京津冀的航路規劃空域環境后,進行最優路徑的搜索。研究采用蟻群算法進行最短路徑搜索。然后利用ArcMAP軟件自帶的指數核的多項式近似 (PAEK)算法,基于無人機的性能參數(假設無人機最小轉彎半徑為1千米)進行航路的平滑優化,得到全國無人機低空骨干航路網(圖5)和京津冀無人機低空多級航路網(圖6)。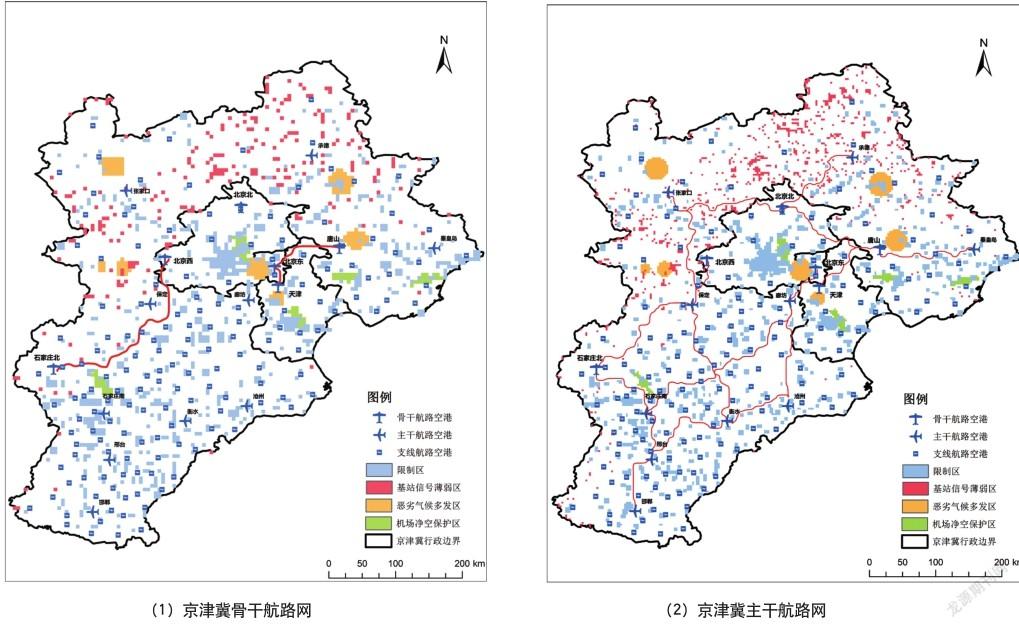
結束語
結合無人機商業化應用的迅猛發展和日益增加的無人機數量所引起的監管困難,本文提出并定義了無人機低空多級公共航路的概念,研究了無人機低空多級航路規劃的關鍵技術,并將其應用到全國和京津冀航路網規劃設計中,通過地理信息多約束條件和路徑搜索與優化算法,得到基于全國無人機空港骨干布局基礎上的全國骨干航路網和包括縣級行政區的京津冀的支線航路網。該研究成果作為基于地理信息技術生成的無人機低空航路圖,可促進和規范未來無人機大范圍商業化應用、為全國和地區的無人機飛行監管提供相關技術支撐,為已有的無人機云管理系統提供公共航路支持。但是當前的無人機低空公共航路規劃僅停留在理論層面,在未來工作中,將對無人機航路實施基于相關軟件平臺的仿真飛行和實際飛行,檢驗數據真實性,論證無人機航路的合理性和安全性;并設計和開發無人機航路規劃軟件,規范推進無人機低空應用的大發展。
猜你喜歡
房地產導刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術與機床(2017年3期)2017-06-23 08:11:34
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41