微型電動汽車懸架系統(tǒng)設(shè)計與平順性分析
2018-09-13 02:19:18蘭鳳崇陳吉清翁楚濱曾文波
重慶理工大學學報(自然科學) 2018年8期
關(guān)鍵詞:優(yōu)化
陳 鑫,蘭鳳崇,陳吉清,翁楚濱,曾文波
(1.華南理工大學 機械與汽車工程學院/廣東省汽車工程重點實驗室, 廣州 510640;2.中國電器科學研究院 工業(yè)產(chǎn)品環(huán)境適應(yīng)性國家重點實驗室, 廣州 510300)
近年來,微型電動汽車逐漸受到一些消費者的青睞,但其也存在著操縱穩(wěn)定性和平順性較差、安全得不到保障等問題,這不僅會影響到乘員的乘坐體驗,甚至會危及乘員的生命安全。汽車懸架系統(tǒng)作為汽車重要的組成部分,對于確保汽車的舒適性和安全性有著重要意義。國內(nèi)外關(guān)于汽車懸架系統(tǒng)的研究主要圍繞以上性能展開,并且多以基準車為基礎(chǔ),針對已有懸架系統(tǒng)以改善性能為目標進行分析和優(yōu)化。一方面,在已有懸架系統(tǒng)結(jié)構(gòu)基礎(chǔ)上進行結(jié)構(gòu)參數(shù)化,根據(jù)懸架的綜合性能要求進行參數(shù)協(xié)同設(shè)計優(yōu)化。如:馬俊等[1]基于轉(zhuǎn)向回正性能和輕便性,計及殘留橫擺角速度和前輪定位諸參數(shù)之間的關(guān)系,建立了一種前輪定位參數(shù)優(yōu)化設(shè)計方法,并以某輕型貨車為例,對其前輪定位參數(shù)值進行優(yōu)化,并通過相關(guān)試驗驗證了所選定位參數(shù)的正確性和合理性;劉偉等[2]以汽車行駛平順性、操縱穩(wěn)定性為優(yōu)化目標,對后懸架彈簧剛度、減振器阻尼系數(shù)及穩(wěn)定桿扭轉(zhuǎn)剛度進行了優(yōu)化。另一方面,從懸架動力學特性出發(fā),在虛擬載荷系統(tǒng)中利用數(shù)值分析對系統(tǒng)結(jié)構(gòu)進行改進或設(shè)計優(yōu)化,如梅聲遠等[3]利用有限元方法對某款乘用車扭轉(zhuǎn)梁半獨立后懸架進行了靜力分析,獲得了在各種典型工況下懸架結(jié)構(gòu)強度分布規(guī)律和動態(tài)特性,并對原有結(jié)構(gòu)的設(shè)計薄弱環(huán)節(jié)提出了改進方向。
本研究對全新開發(fā)的微型電動車進行懸架設(shè)計,針對其整車質(zhì)量小、尺寸小的特點給出該車懸架系統(tǒng)的設(shè)計方法,根據(jù)整車布置和性能要求進行結(jié)構(gòu)設(shè)計,結(jié)合結(jié)構(gòu)參數(shù)化和有限元數(shù)值化方法,對懸架系統(tǒng)進行優(yōu)化和校核,并通過整車平順性分析驗證懸架系統(tǒng)設(shè)計的合理性。
1 懸架系統(tǒng)的參數(shù)化
1.1 懸架形式選擇
目標車總質(zhì)量m為700 kg,總簧下質(zhì)量mu為60 kg,軸荷比為55∶45,軸距L為1 870 mm,輪距B為1 480 mm,前輪型號為145/60R13,后輪型號為165/55R13。該車定位為短距離代步車,設(shè)計最高行駛車速為100 km/h,對乘坐舒適性的要求不算很高,且整車尺寸較小,不適合占用空間較多的懸架類型。麥弗遜懸架具有經(jīng)濟性好、結(jié)構(gòu)簡單、占用空間小、車輪定位參數(shù)變化小等優(yōu)點,故選擇麥弗遜式懸架作為該車的前懸架。扭轉(zhuǎn)梁隨動臂式懸架具有結(jié)構(gòu)簡單、成本低、適用于前置前驅(qū)乘用車后懸架等特點,故選擇扭轉(zhuǎn)梁隨動臂式懸架作為該車的后懸架。
在設(shè)計懸架時,往往以其需要達到的性能作為驅(qū)動。懸架系統(tǒng)作為汽車重要的組成部分,對汽車的操縱穩(wěn)定性和可靠性有著極大的影響。在車輪上下跳動時,車輪定位參數(shù)會發(fā)生變化,若其變化能滿足一定要求,則能使汽車具有較好的操縱穩(wěn)定性。可靠性涉及零件的耐久性、強度等方面,這里主要考慮后懸架的強度表現(xiàn)。因此,在完成懸架的初步設(shè)計后,將就車輪定位參數(shù)的變化特性和扭轉(zhuǎn)梁后懸架在極限工況下的強度性能兩個方面對懸架系統(tǒng)進行性能分析及優(yōu)化。
1.2 懸架的設(shè)計參數(shù)
懸架的設(shè)計參數(shù)可以歸結(jié)為兩類:表征結(jié)構(gòu)尺寸的硬點坐標和表征力學特性的彈簧剛度及減震器阻尼。懸架的硬點坐標決定了前輪定位參數(shù)隨車輪跳動時的變化特性,由設(shè)計經(jīng)驗選定前輪外傾角和前束角為0°,主銷后傾角為3°,主銷內(nèi)傾角為12°,主銷偏移距為15 mm。根據(jù)上述前輪定位參數(shù)初始值和布置要求,繪制了前懸架導向機構(gòu),見圖1。扭轉(zhuǎn)梁懸架的強度受很多因素影響,如懸架結(jié)構(gòu)和尺寸、加工工藝等,圖2為結(jié)合整車設(shè)計需求和裝配要求建立的扭轉(zhuǎn)梁懸架三維模型。
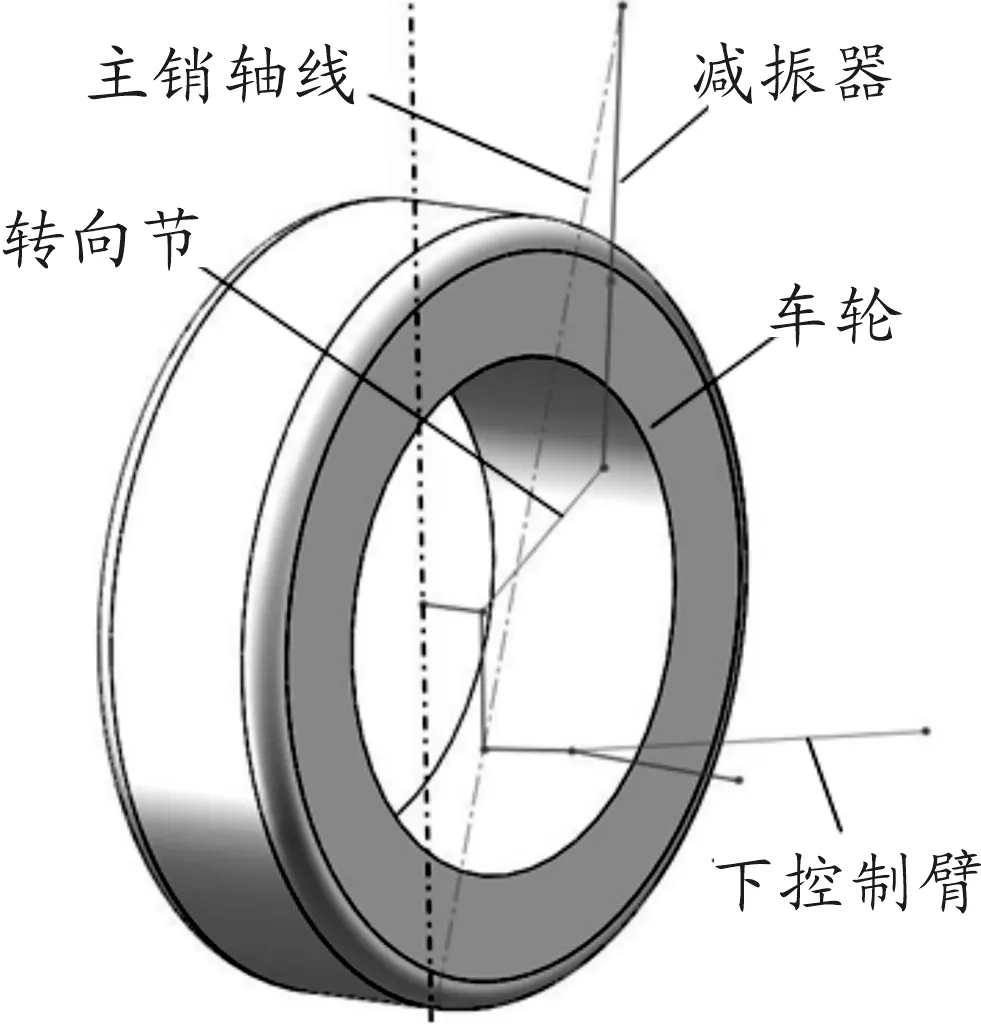
圖1 導向機構(gòu)
由建立的前后懸架模型得到了懸架硬點坐標,如表1所示,并在Adams中建立了懸架系統(tǒng)的仿真模型(見圖3、圖4)。
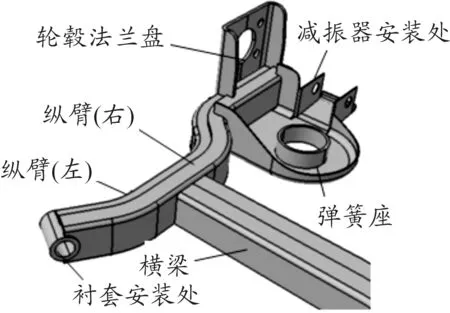
圖2 后懸架扭轉(zhuǎn)梁結(jié)構(gòu)形式三維模型
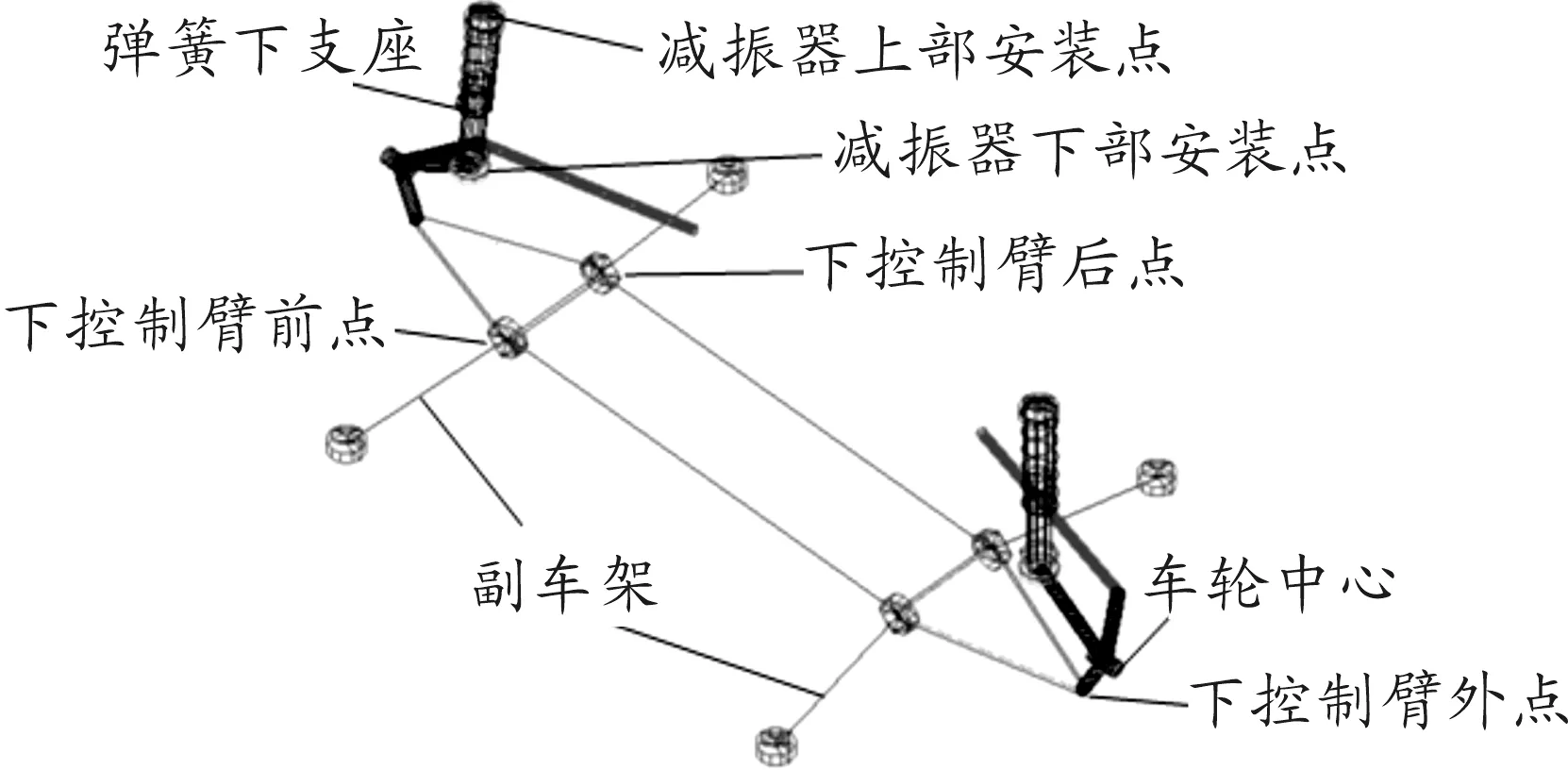
圖3 麥弗遜懸架系統(tǒng)
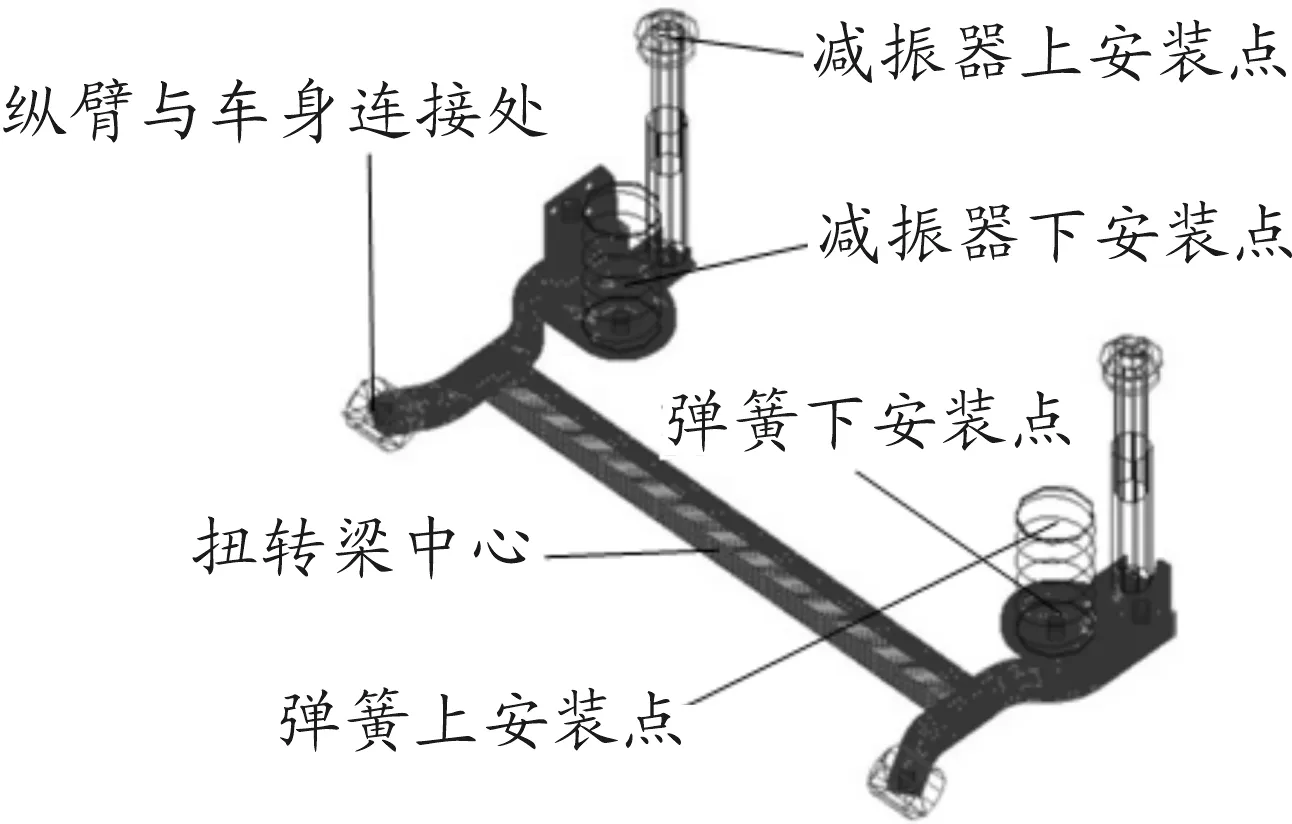
圖4 扭轉(zhuǎn)梁懸架系統(tǒng)
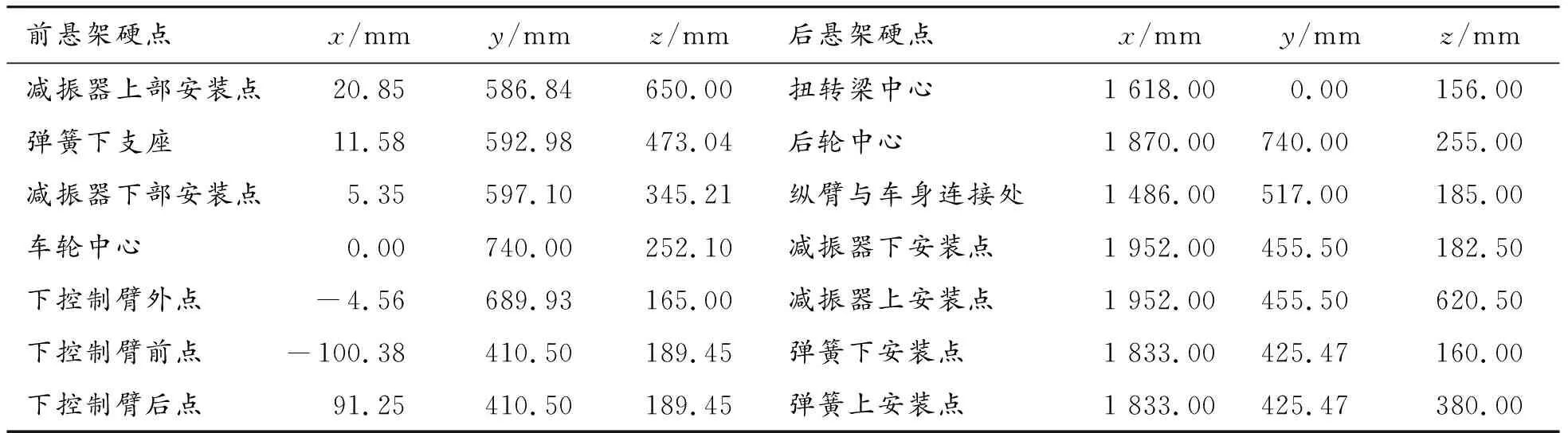
表1 懸架硬點坐標
根據(jù)整車參數(shù)和設(shè)計經(jīng)驗,選定:前懸架剛度為21 kN/m,偏頻為1.23 Hz,靜撓度為164.4 mm;后懸架剛度為22 kN/m,偏頻為1.39 Hz,靜撓度為128.4 mm。取壓縮時相對阻尼系數(shù)ζc=0.12,伸張時相對阻尼系數(shù)ζe=0.4,可求得前懸架壓縮時阻尼為652.5 N·s/m,伸張時阻尼為2 175.1 N·s/m;后懸架壓縮時阻尼為604.1 N·s/m,伸張時阻尼為2 013.7N·s/m。如圖5所示:Kl和δ分別為麥弗遜懸架單側(cè)的剛度和阻尼,也即懸架總剛度和總阻尼的一半;b為減振器上部安裝點A到懸架側(cè)傾中心M的距離;p為輪胎接地點C到懸架側(cè)傾中心M的距離。對于麥弗遜懸架,其彈簧剛度與懸架總剛度,減振器阻尼與懸架總阻尼分別有如式(1)和(2)的數(shù)學關(guān)系。
由麥弗遜懸架導向機構(gòu)確定b和p的值分別為3 890.8mm、4 041.6mm,由式(1)和(2)可得前懸架彈簧剛度Ks為11.3kN/m,減振器阻尼δa為352.0N·s/m(壓縮時)和1 173.5N·s/m(伸張時)。
2 懸架性能特性分析及優(yōu)化
2.1 前輪定位參數(shù)的變化特性
前輪定位參數(shù)隨車輪跳動有良好的變化特性,對于汽車的操縱穩(wěn)定性有著積極的意義。一般要求:在車輪跳動量為±50mm時,前輪外傾角變化范圍為0°~1°20′,變化量為-2°~+0.5°/50mm;主銷后傾角變化范圍為1°~4°;主銷內(nèi)傾角變化范圍為11°~15°30′;前束角變化范圍為0°±10′,變化量為0°~-0.5°/50mm[4-5]。
為了分析前輪定位參數(shù)隨車輪跳動的變化特性,在Adams中對前懸架進行雙輪同向跳動仿真,結(jié)果如圖6虛線所示。由圖6可見:前輪外傾角變化范圍為-0.3°~1.25°,變化量約為1.06°/50mm;主銷后傾角變化范圍為2.8°~3.35°;主銷內(nèi)傾角變化范圍為10°~13.3°;前束角變化范圍為-0.025°~0.375°,變化量為0.375°/50mm。因此,除了主銷內(nèi)傾角超出了變化范圍需要優(yōu)化外,其余3個定位參數(shù)均滿足前述要求。
利用Adams的Insight模塊對主銷內(nèi)傾角進行優(yōu)化,選擇主銷內(nèi)傾角的均方根值為優(yōu)化目標,其值越小越好。考慮到整車裝配等因素,諸如減振器下部安裝點、車輪中心、彈簧下支座等很難調(diào)整,故選擇減振器上安裝點,下控制臂外點,下控制臂前后點的x、y、z坐標作為優(yōu)化變量。為了從眾多優(yōu)化變量中篩選出對優(yōu)化目標影響最大的變量,需要先分析主銷內(nèi)傾角對于各個優(yōu)化變量的靈敏度。設(shè)定各優(yōu)化變量的變化范圍為±1%,仿真時間為 10s,車輪跳動量為±50mm,對模型進行以試驗要素篩選為目的的雙輪同向跳動仿真,結(jié)果如圖7所示。
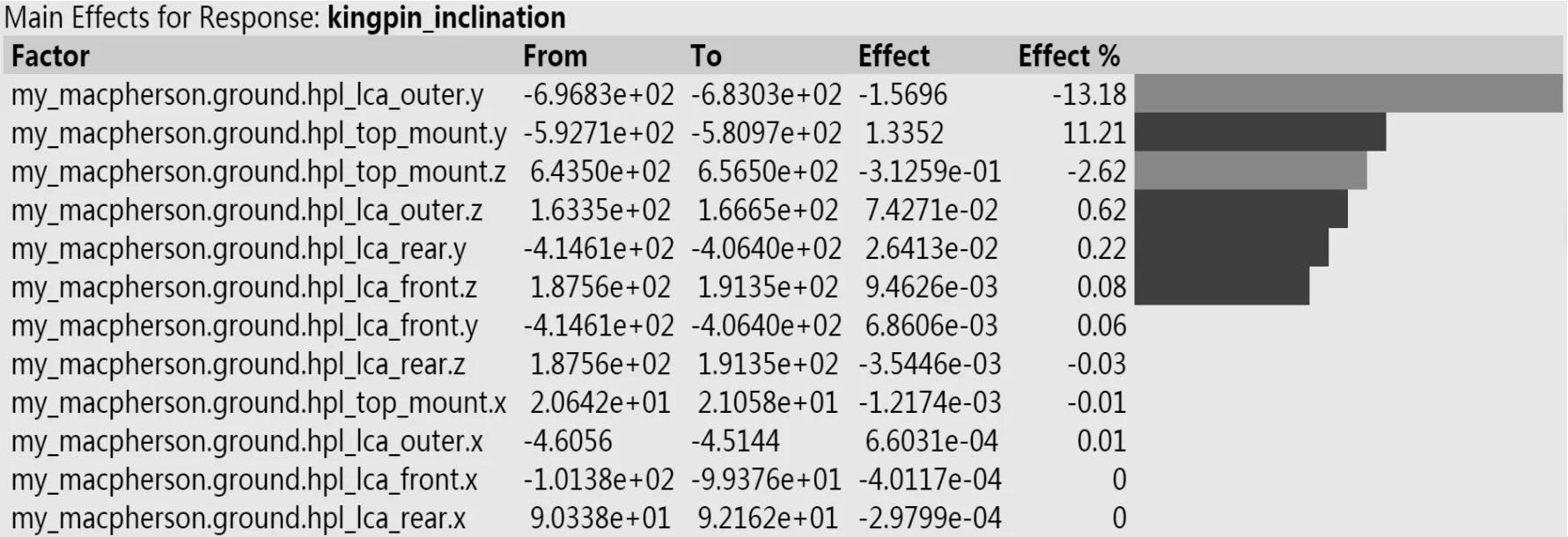
圖7 主銷內(nèi)傾角對各變量的敏感度
這里選取對主銷內(nèi)傾角有5%以上靈敏度的變量,即下控制臂外點的y坐標(lca_outer.y)和減振器上部安裝點的y坐標(top_mount.y)作為設(shè)計變量,將其變化范圍約束在±10%內(nèi)。設(shè)置4個定位參數(shù)的均方根值處于前述設(shè)計要求范圍內(nèi),作為約束條件。采用二次響應(yīng)面擬合法優(yōu)化,其余試驗條件與靈敏度分析試驗相同。優(yōu)化后下控制臂外點的y坐標和減振器上部安裝點的y坐標分別為-696.83和-581.23。
優(yōu)化后再次仿真,結(jié)果如圖6實線所示,可以看到主銷內(nèi)傾角變化范圍約為11.5°~14.8°,已經(jīng)在理想范圍內(nèi),而前輪外傾角、主銷后傾角的變化和之前相差很小。雖然前束角變化相較之前而言,在車輪上跳時增加的趨勢更為明顯,但最大變化量和變化范圍卻減少了,更加接近0°。
2.2 多種極限工況下的性能分析
將扭轉(zhuǎn)梁懸架三維模型導入Hypermesh軟件后,對各個零件抽取中面,進行幾何清理, 然后用2D里的automesh對模型進行網(wǎng)格劃分。網(wǎng)格是以四邊形為主、有少數(shù)三角形的混合單元。用1Drigid單元模擬焊縫,將有裝配關(guān)系的零件的對應(yīng)點連接起來。應(yīng)盡量使較多的對應(yīng)點連接,且連線要接近水平,以保證受力均勻,避免應(yīng)力集中或過大。通過移動單元節(jié)點、單元自動優(yōu)化等方法,使模型的QI值(質(zhì)量指數(shù))達到0.01,表明網(wǎng)格質(zhì)量很好,無任何單元失效。結(jié)構(gòu)各零件材料都為鋼,彈性模量為2.1×105GPa,泊松比為0.3,密度為7.9×103kg/m3,屈服極限為355MPa。橫梁的厚度為1.5mm,縱臂和彈簧座的厚度為5mm,輪轂法蘭盤和襯套安裝處的厚度為6mm。
對于扭轉(zhuǎn)梁后懸架的強度分析,主要考慮以下幾種極限工況:雙側(cè)車輪駛過凸包、緊急制動和極限轉(zhuǎn)向。先在縱臂與車身連接處,襯套的中心添加節(jié)點,再用剛性單元將該節(jié)點與襯套安裝處的所有節(jié)點連接,并約束節(jié)點X、Y、Z三個方向的平動自由度和繞Y、Z軸的轉(zhuǎn)動自由度,以此來模擬車身對縱臂的約束。再在彈簧支座加上1D彈簧單元,模擬懸架彈簧。然后根據(jù)具體工況的受力情況,在兩側(cè)輪轂法蘭盤的4個螺栓孔圓周節(jié)點上加載相應(yīng)載荷即可。
駛過凸包工況:車輪經(jīng)過減速帶等不平路面時,路面對車輪有很大的沖擊,并會傳遞給扭轉(zhuǎn)梁懸架。取動載系數(shù)k=2,則兩側(cè)車輪受到垂向力FZ為
緊急制動工況:急剎車時,車輪接近抱死,除垂直方向的力FZ外,還受到縱向的地面制動力作用,取路面附著系數(shù)φ=0.7。
FX=FZφ=989 N
(4)
極限轉(zhuǎn)向工況:極限轉(zhuǎn)向時,車輛受到離心力的作用,轉(zhuǎn)向內(nèi)側(cè)離開地面,僅靠外側(cè)車輪支撐,同時該側(cè)到地面?zhèn)认蚰Σ亮Y的作用。
FZ=2 826 N
FY=FZφ=1 978 N
(5)
僅以3種極限工況中的應(yīng)力最大的極限轉(zhuǎn)向工況為例,該工況下應(yīng)力幾乎只分布在受力車輪一側(cè),分析結(jié)果如圖8所示,由圖8可見:最大應(yīng)力為352 MPa,發(fā)生在縱臂與車身連接處,小于材料的屈服極限;最大位移為2.9 mm,發(fā)生在輪轂法蘭盤外端。因此,設(shè)計的扭轉(zhuǎn)梁懸架滿足強度要求。
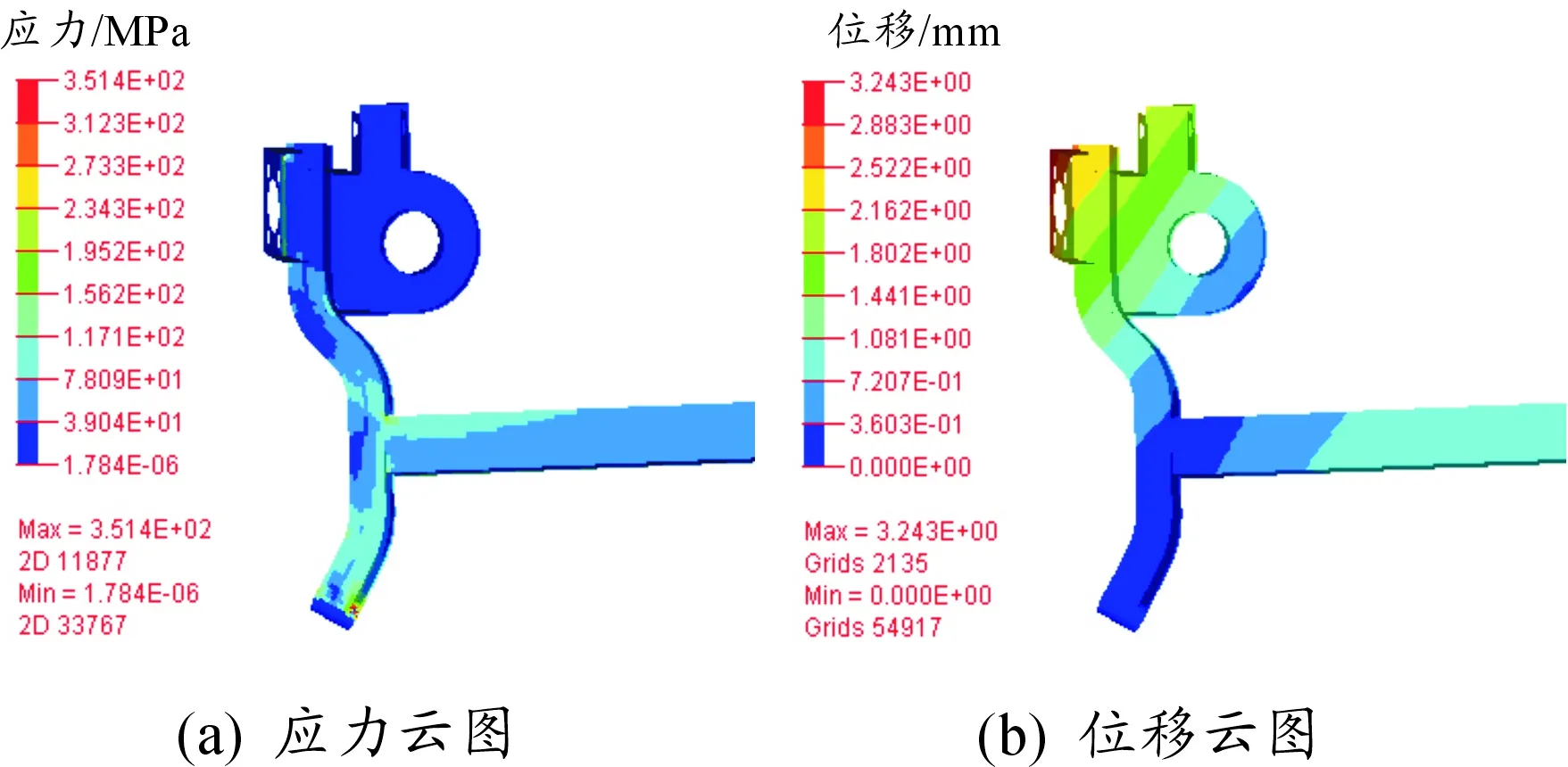
圖8 極限轉(zhuǎn)向時的強度校核云圖
3 整車平順性仿真
3.1 隨機瀝青路面仿真
在前述前后懸架子系統(tǒng)的基礎(chǔ)上搭建了整車模型,如圖9所示。為了進行平順性仿真,還需為懸架系統(tǒng)賦予彈簧剛度特性和減振器阻尼特性。在設(shè)計經(jīng)驗范圍內(nèi),對彈簧剛度和減振器阻尼多次取值仿真,得到了較為合適的組合如下:前后懸架的彈簧剛度均為7 kN/m,前后懸架的減振器阻尼均為300 N·s/m(壓縮時)和1 200 N·s/m(伸張時)。
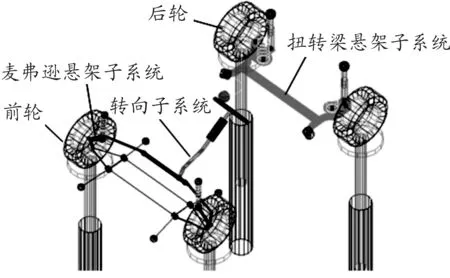
圖9 整車仿真模型
Adams自帶的路面生成工具以Sayers經(jīng)驗?zāi)P蜑榛A(chǔ),輸入不同的功率譜密度,即可得到相應(yīng)等級的隨機路面。選擇B級瀝青路面進行仿真,對應(yīng)的Sayers模型空間功率譜密度Ge為0 m2·s,速度功率譜密度Gs為12 m2·s,加速度功率譜密度Ga為0.17 m2·s。以常用車速40 km/h在生成的隨機瀝青路面上仿真,仿真結(jié)果如圖10所示。可以看出:車身質(zhì)心在縱向振動的功率譜峰值出現(xiàn)在2.2 Hz和5.5 Hz處,在側(cè)向振動的功率譜峰值出現(xiàn)在6.8 Hz和17.5 Hz處,避開了水平振動最敏感頻率范圍0.5~2 Hz,但2.2 Hz與該范圍的上限很接近,會使人略微感到不舒適;在垂向振動的功率譜峰值出現(xiàn)在2.6 Hz和18.1 Hz,不處于垂向振動最敏感頻率范圍4~12.5 Hz。從峰值頻率看,本車的平順性比較好。
3.2 平順性計算與評估
根據(jù)國標和ISO 2631—1:1997(E),單軸向加權(quán)加速度均方根值aw可由式(6)求得。
式中W( f )頻率加權(quán)函數(shù)見式(7)和(8),其圖像見圖11。
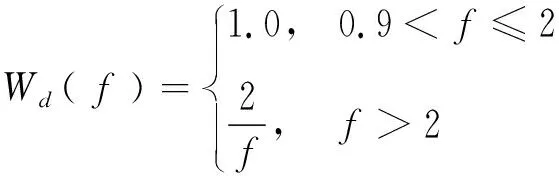
(7)
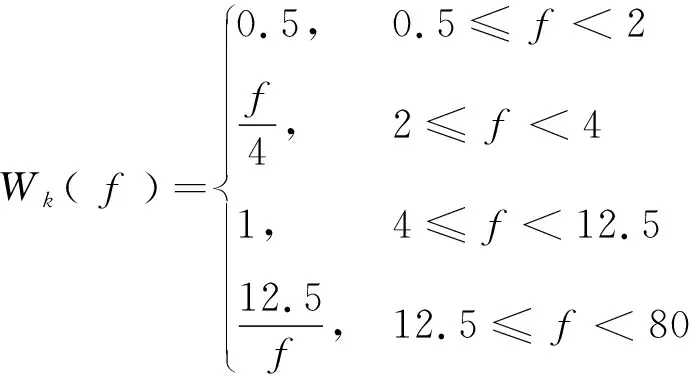
(8)
根據(jù)式(6),用加權(quán)函數(shù)曲線的平方與功率譜密度曲線相乘得曲線1,對其積分得曲線2(圖12),其最大值再開方,得車身質(zhì)心處Z軸向加權(quán)加速度均方根值為0.428m/s2。由于座椅下方車身處的垂向加速度均方根值是座椅上人體感受的1.4倍以上[8],故可以用車身質(zhì)心處3個方向上的加權(quán)加速度均方根值除以1.4作為本車平順性的評價指標。于是計算得Z軸加權(quán)加速度均方根值azw為0.306m/s2,用同樣的方法求得X軸和Y軸加權(quán)加速度均方根值axw、ayw分別為0.010m/s2和0.183m/s2。
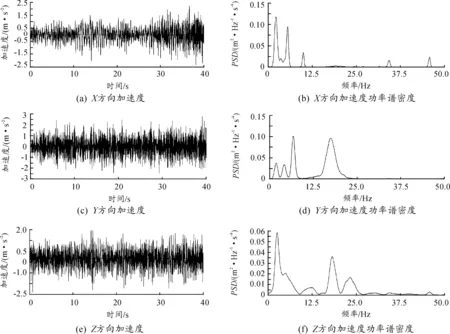
圖10 車身質(zhì)心處3個方向的加速度時間歷程及其功率譜密度曲線
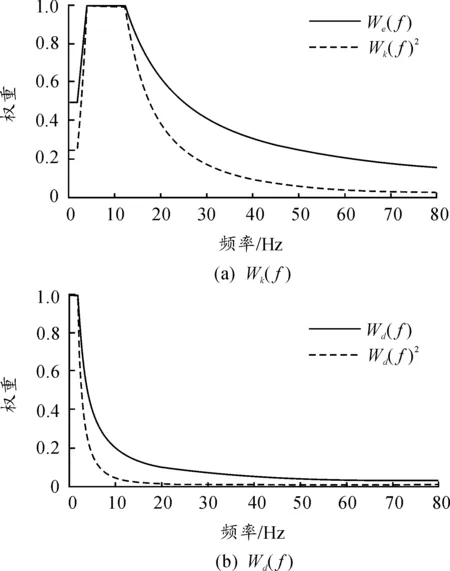
圖11 頻率加權(quán)函數(shù)
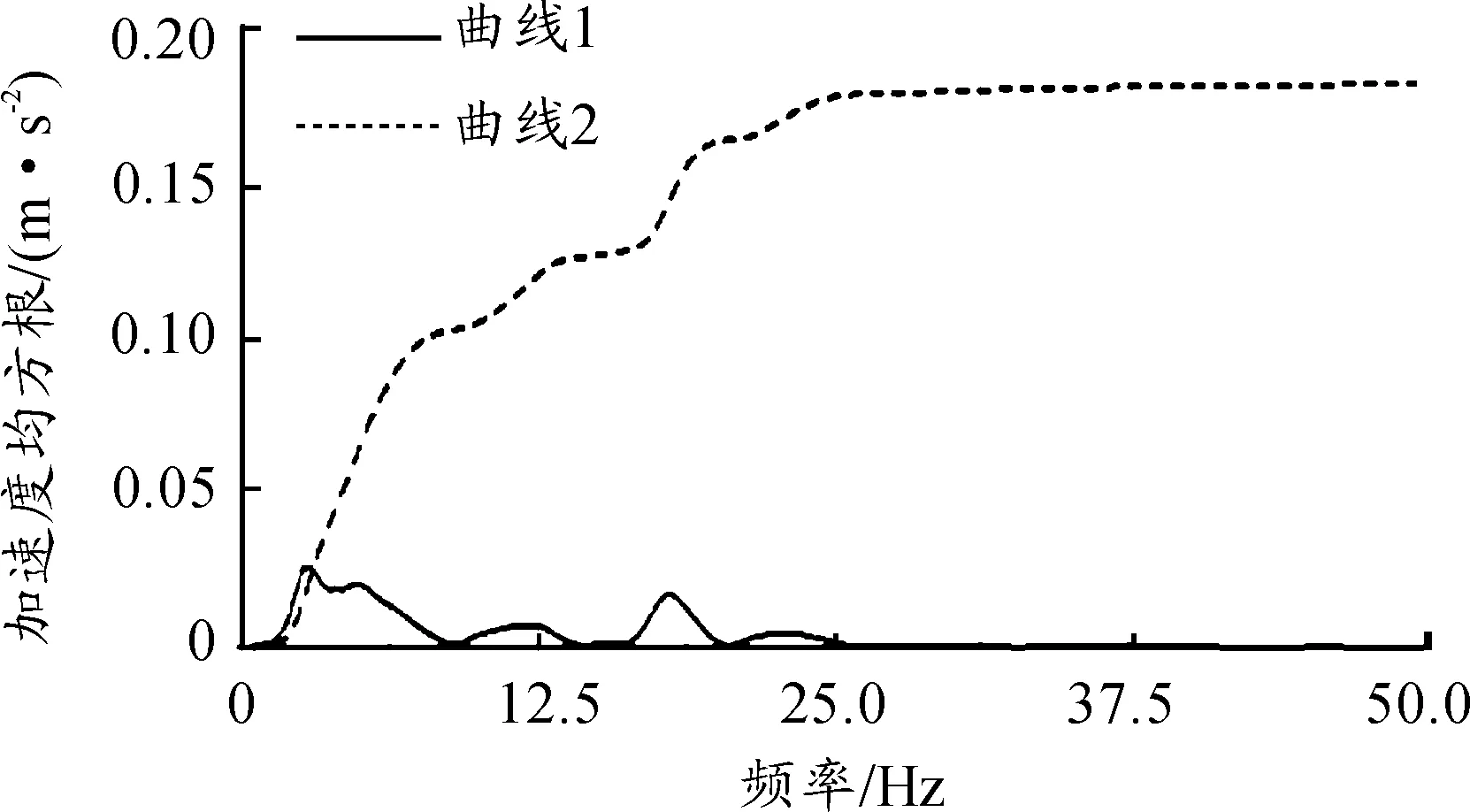
圖12 車身質(zhì)心Z軸加權(quán)加速度均方根值
可見,X軸加權(quán)加速度均方根值axw幾乎為0,這是因為汽車軸距短,且前后懸架匹配較為合理,使得汽車前后部分振動比較一致,沒有明顯的俯仰運動。Y軸加權(quán)加速度均方根值ayw相較而言就比較大,因為在設(shè)置仿真參數(shù)時,兩側(cè)輪轍輸入的信號并不完全相同,汽車在行駛時會產(chǎn)生側(cè)傾運動。根據(jù)軸加權(quán)加速度均方根值ayw與人的主觀感覺之間的關(guān)系,在X、Y、Z三個方向的加權(quán)加速度均方根值均低于0.315m/s2的安全閾值。因此,本車在瀝青路面(B級路面)下行駛時的平順性良好,能帶給乘員舒適的乘坐體驗。
4 結(jié)束語
針對全新開發(fā)微型電動車懸架系統(tǒng)設(shè)計,為確保汽車具有良好的平順性、操縱穩(wěn)定性和可靠性,確定了定位參數(shù)優(yōu)化、強度校核和平順性評估等流程,能節(jié)省微型電動汽車開發(fā)時的實車試驗成本并縮短研發(fā)周期,可作為微型電動汽車懸架設(shè)計參考。
懸架系統(tǒng)設(shè)計參數(shù)為表征懸架結(jié)構(gòu)尺寸的硬點坐標及表征懸架力學特性的彈簧剛度和減振器阻尼。結(jié)合整車布置和設(shè)計要求,建立了麥弗遜懸架模型和扭轉(zhuǎn)梁懸架模型,確定了上述參數(shù)的初始值。
通過雙輪跳動仿真,得到了前輪定位參數(shù)隨車輪跳動的變化曲線。針對主銷內(nèi)傾角變化不夠理想的問題進行了優(yōu)化,結(jié)果顯示:主銷內(nèi)傾角變化范圍從10°~13.3°變?yōu)?1°~15°30′,并且所有定位參數(shù)均有良好的變化特性。分析了極限工況下扭轉(zhuǎn)梁懸架的受力情況,最大應(yīng)力為352 MPa,小于材料的屈服極限,說明設(shè)計的扭轉(zhuǎn)梁懸架滿足強度要求。
基于設(shè)計的懸架系統(tǒng)建立了整車仿真模型,通過隨機瀝青路面平順性仿真得到了汽車在40 km/h時的加權(quán)加速度均方根值,該值小于 0.315 m/s2的安全閾值,表明該車的平順性良好。在保證建立的整車模型與實車高度吻合的前提下,該方法可作為評估汽車平順性的有效且便捷手段。在利用其他優(yōu)化方法獲得前后懸架彈簧剛度和減振器阻尼的最優(yōu)解后,修改模型中的相關(guān)特性,重新仿真便可以得到最佳的平順性,從而驗證優(yōu)化結(jié)果的正確性,為實車試制時的參數(shù)取值提供重要理論依據(jù)。
猜你喜歡
房地產(chǎn)導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導向(2021年7期)2021-07-16 07:07:52
中學生數(shù)理化(高中版.高二數(shù)學)(2021年12期)2021-04-26 07:43:48
中學生數(shù)理化(高中版.高考數(shù)學)(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45