靜止軌道衛星南北位置保持推力器效率補償方法及應用
2018-09-15 08:35:10邱瑞左子瑾戴雪揚
航天器工程 2018年4期
關鍵詞:效率
邱瑞 左子瑾 戴雪揚
(北京空間飛行器總體設計部,北京 100094)
地球靜止軌道衛星位置保持是衛星長期在軌管理工作中的重要測控事件,對于地球靜止軌道衛星,南北位置保持克服衛星軌道傾角受太陽和月球攝動的影響。傾角攝動的短周期項很小,可以作為誤差處理,主要考慮長周期項和長期項。主要的長周期項有幅值約0.004°的半月周期項和幅值約0.023°的半年周期項。長期攝動使傾角按0.75~0.95(°)/年的速率變化,需要進行軌道傾角修正[1]。
南北位置保持過程中,成對點火的2個10 N推力器在點火過程中對衛星的X軸產生控制力矩,滾動角不可避免地會出現正向超調[2],衛星姿態會出現波動,嚴重時會影響用戶使用,隨著衛星用戶對衛星姿態要求程度不斷提高,開展避免南北位置保持時姿態超調過大的研究具有十分重要的意義。
本文通過對南北位置保持情況的分析,提出了利用推力器點火時間反推出推力器工作效率的在軌補償方法,針對某在軌衛星在軌實際驗證,成功地將衛星姿態超調量控制在0.15°以內。
1 南北位置保持原理及策略
靜止軌道衛星每天在南北緯度方向周期性漂移是由于軌道傾角引起的,而傾角的漂移是太陽、月球攝動引起的,其結果是傾角矢量在一個近似圓錐面上進動,圓錐中心線的傾角大約為7.4°,并倒向黃極方向,以54年為周期作負方向旋轉,其中太陽攝動引起半年為周期的波動,月球攝動引起周期為兩星期的較小波動,它們是傾角變化的主要因素。靜止軌道衛星受到太陽和月球的引力方向如圖1和圖2所示[3]。

圖1 太陽對靜止軌道衛星的引力方向示意圖Fig.1 Sketch map of gravitation direction between sun and GEO satellite
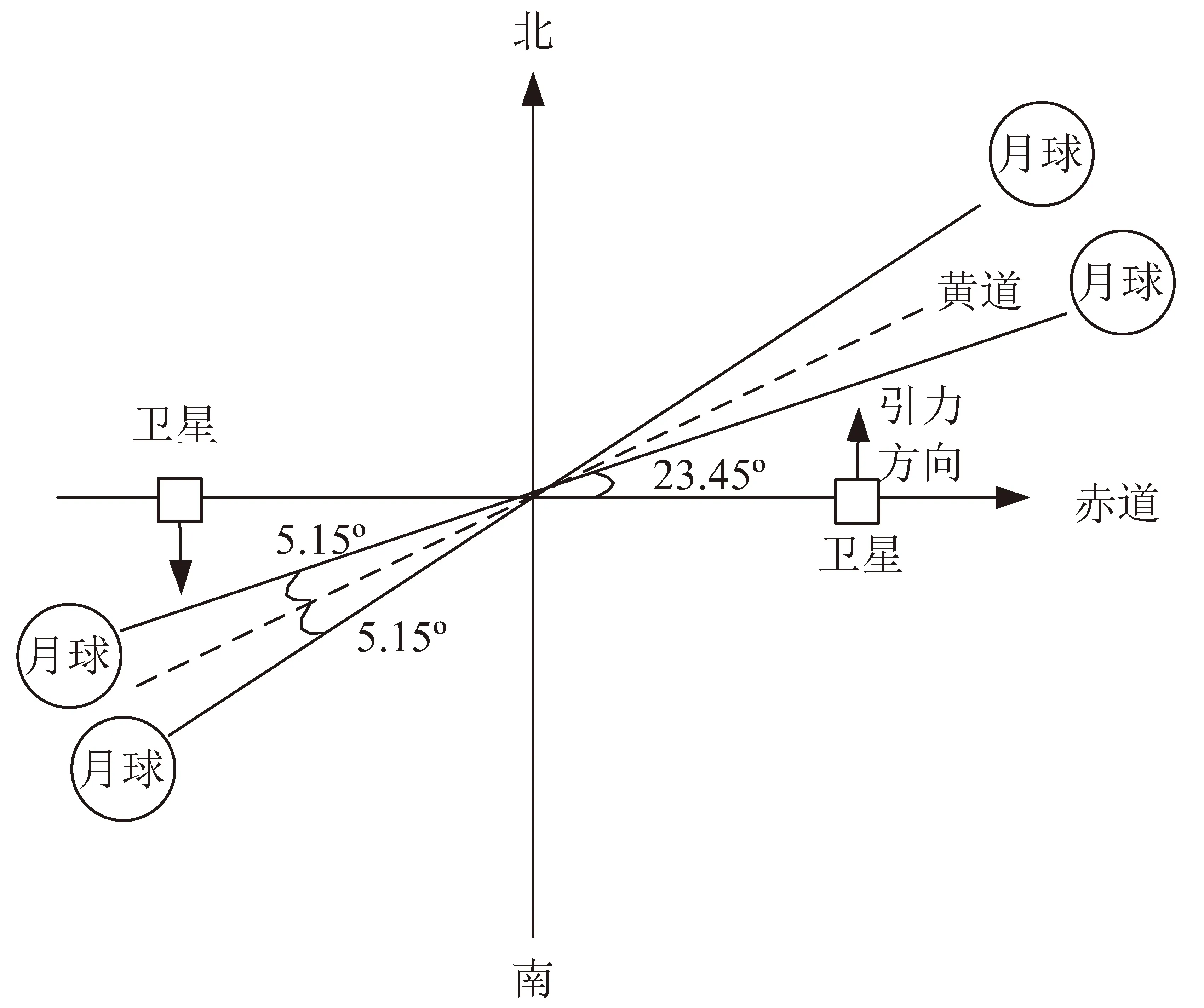
圖2 月亮對靜止軌道衛星的引力方向示意圖Fig.2 Sketch map of gravitation direction between moon and GEO satellite
為使衛星星下點不漂出其定點位置允許的范圍偏差,在衛星即將漂出其范圍前,對衛星進行南北位置保持控制,使其維持在允許的范圍內。
南北位置保持控制采用傾角負偏置策略,在位置保持模式下向南加速,對軌道傾角矢量進行修正。為了使控后軌道具備開始正常運行和例行位置保持控制的條件,傾角矢量修正的目標應該使控后傾角為最大允許值,升交點赤經大約為270°(即所謂“負傾角”)[4]。
2 推力器效率補償方法及效果
2.1 推力器布局
靜止軌道衛星的軌道位置保持所需推力由雙組元推進系統的10 N 推力器提供,某靜止軌道衛星上共安裝14個10 N推力器, 分成 A、B兩個分支。推力器安裝如圖3所示。

圖3 某靜止軌道衛星推力器布局圖Fig.3 Thruster layout of a GEO satellite
為了減小干擾力矩、提高控制精度和改善推力器工作條件,采取脈沖關調制方式進行軌道控制。由姿態與軌道控制計算機(AOCC)根據開關調制占空比要求,在兩個推力器成對點火時推力器關調制工作,其他時間推力器開調制工作。
2.2 現象描述
某靜止軌道衛星A在軌使用10 N推力器A分支進行姿態和軌道控制,南北位置保持使用成對10 N推力器6A和7A,2個推力器分別產生滾動方向正向和負向力矩,成對工作可產生俯仰軸方向的正向推力,以達到控制軌道傾角的目的。
該衛星在軌多次南北位置保持作業中發現,位置保持過程中滾動姿態角超調量過大,最高達到0.3°左右,該現象會使衛星業務受到部分影響。以某一次南北位置保持為例,位置保持過程中姿態角變化趨勢見圖4。

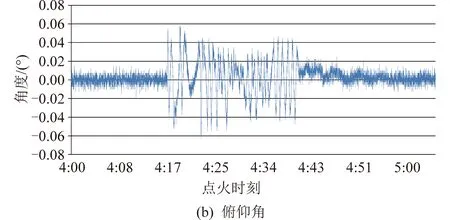
圖4 南北位置保持過程中衛星A姿態角趨勢圖Fig.4 Attitude angle trendline of satellite A in NSSK
該星在南北位置保持過程中使用3個10 N推力器6A、7A成對點火,由圖3可知滾動角出現正向超調,表明推力器6A的推力比7A大,在滾動方向產生了一個正向外力矩。同時俯仰姿態角變化的趨勢范圍為-0.05°~0.058°。
2.3 現象分析
靜止軌道衛星A南北位置保持控制目前采用向北位置保持,軌道機動使用6A、7A推力器。6A、7A推力器點火時對衛星的X軸產生控制力矩,力矩值約為3.6 Nm,6A、7A成對點火進行南北位置保持時,滾動角不可避免的會出現正向超調,為了維持衛星姿態,星載計算機在南北位置保持過程中采用關調制的方式,通過減少某一推力器點火時間的方法抵消干擾力矩的影響,雖然這種調節方法可以保持衛星姿態,但由于時間滯后,位置保持過程中出現姿態超調現象是必然的。
2.4 補償方法
針對南北位置保持過程中姿態角出現0.3°的超調量現象,可以通過調整推力器效率的方法,使星載計算機提前識別點火過程中產生的力矩偏差,減少力矩較大的推力器的點火時間(通過關調制實現)[5-7],最終達到減少姿態超調量的目的。
此次南北位置保持過程10 N推力器的點火時間統計見表1,軌道面法向速度增量為3.854 m/s,點火脈沖為542個。

表1 南北位置保持過程中10 N推力器點火時間
由圖4和表1可知本次南北位置保持過程中10 N推力器6A的實際推力比7A大,推力器6A的點火時間比7A少147 s。
由于2個推力器的點火時間可以反映其力矩大小的不同,南北位置保持推力器效率補償方法可以通過計算推力器6A與7A的點火時間來確定推力器效率,以此作為力矩補償系數上注星載計算機,提前預知兩個推力器的力矩偏差,在后續南北位置保持操作過程中減少衛星姿態超調,避免給衛星用戶使用帶來影響[8-9]。
可以利用兩個推力器點火時間的比值來反推出推力器工作效率。設置推力器7A的工作效率為1,則有:推力器6A效率=7A點火時間/6A點火時間=698/551≈1.27。
考慮到余量,在后續南北位置保持中選擇推力器6A的效率為1.25,推力器7A效率不變,仍然保持原來的效率值1。圖5給出了推力器6A效率補償后南北位置保持過程中姿態角變化情況。
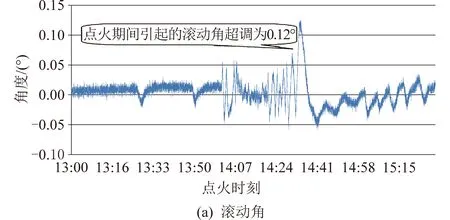
圖5 衛星A推力器效率補償后姿態角趨勢圖Fig.5 Attitude angle trendline of satellite A after efficiency compensatory
從圖5中可以看出,推力器6A效率調整后,位置保持過程滾動姿態角超調明顯變小,在點火開始時滾動角超調量消失,而在點火結束時滾動角超調量為0.12°;俯仰姿態角的趨勢范圍為-0.058°~0.05°,與補償前基本一致。
本次南北位置保持過程10N推力器的點火時間統計見表2,軌道面法向速度增量為3.983 m/s,點火脈沖為585個。
表2 南北位置保持過程中10 N推力器點火時間
由表2可以看出推力器效率補償后南北位置保持過程中推力器6A、7A點火時間相差不大。同時推力器效率補償前后的兩次南北位置保持控制量和脈沖個數基本相同,但補償后的南北位置保持過程推力器點火時間明顯增加。
3 推力器效率補償方法應用
同平臺某靜止軌道衛星B采用了相同的優化位保控制參數的效率補償方法,圖6為推力器效率補償前后南北位置保持過程中滾動角變化情況。
由圖6可見靜止軌道衛星B采用了推力器效率補償后效果顯著,南北位置保持過程中的滾動軸姿態負向超調由-0.34°降低為-0.11°。

圖6 衛星B推力器效率補償前后滾動角趨勢圖Fig.6 Attitude angle trendline of satellite B after efficiency compensatory
4 結束語
本文針對某靜止軌道衛星南北位置保持過程中出現的姿態超調量過大問題,提出了利用推力器點火時間反推出推力器工作效率的在軌補償方法,通過在軌衛星的實際驗證和應用,有效地將南北位置保持過程中姿態超調量控制在0.15°以內,進一步提高了衛星在軌管理水平。
猜你喜歡
瘋狂英語·初中天地(2021年5期)2021-07-21 02:24:28
甘肅教育(2020年14期)2020-09-11 07:57:42
中學生數理化(高中版.高考數學)(2020年5期)2020-06-02 09:19:08
商周刊(2017年9期)2017-08-22 02:57:49
遼寧經濟(2017年6期)2017-07-12 09:27:16
中國衛生(2016年9期)2016-11-12 13:27:54
時代英語·高二(2015年1期)2015-03-16 00:08:11
中國洗滌用品工業(2015年7期)2015-02-28 19:02:38
電子設計工程(2015年12期)2015-02-27 12:06:10
中國衛生(2014年11期)2014-11-12 13:11:32