開-閉環結合控制方式的定日鏡跟蹤控制策略
2018-09-15 04:31:08郝曉弘郭鐵鍔汪寧渤
自動化儀表 2018年9期
郝曉弘,郭鐵鍔,汪寧渤,丁 坤
(1.蘭州理工大學電氣工程與信息工程學院,甘肅 蘭州 730050; 2.甘肅電力公司風電技術中心,甘肅 蘭州 730050)
0 引言
定日鏡是塔式光熱電站中用于收集太陽能并將其聚集到吸熱器的裝置。其在電站中數量較多、占據場地較大。其控制方式、跟蹤精度和穩定性等性能的優劣,將直接影響電站的運行效率。
常見的定日鏡跟蹤控制方式有開環控制和閉環控制兩種[1]。國外已建塔式電站大多采用開環控制方式。開環控制(即程序控制)具有跟蹤快速、適用于大型鏡場集中調度方便的優點,其缺點是控制算法復雜、存在累積誤差[2-5]且較難校正。閉環控制(即傳感器控制)通過光電傳感器檢測定日鏡與太陽光線的相對位置,根據偏差控制執行機構運動,從而達到精準聚集太陽光的目的[1,6-8]。這類控制可有效克服累積誤差以及鏡面偏心導致的跟蹤角度修正問題。但其缺點也顯而易見:當陰天時,光電傳感器無法檢測到太陽光,可能導致控制失效;不適用于鏡場的集中監控和調度;光電傳感器較難實施定日鏡的大范圍跟蹤,并且跟蹤的精度受傳感器結構、光電池的靈敏度等因素的影響。
由于以上兩種控制方式存在不同的優缺點,隨著塔式電站對定日鏡跟蹤精度要求的不斷提高,本文提出一種兼具這兩種控制方式優點的開-閉環結合的控制方式,并通過試驗,驗證了該方法的可行性。
1 定日鏡結構
根據定日鏡設計要求及控制方式,本文研究的定日鏡采用雙軸結構,即方位角-高度角跟蹤。定日鏡結構如圖1所示。
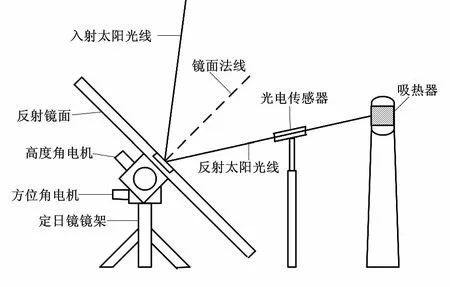
圖1 定日鏡結構圖
部分入射太陽光線經過定日鏡鏡面幾何中心(幾何中心處放置一塊小型平面鏡)反射后,反射太陽光線穿過閉環光電傳感器,投射到吸熱器內。當太陽相對運動時,跟蹤控制系統通過控制定日鏡的鏡面角度,使定日鏡鏡面中心、閉環光電傳感器與吸熱器接收面中心點(或其他指定目標點)始終成“三點一線”。
2 跟蹤控制策略
跟蹤控制系統采用開-閉環結合的控制方式。開環進行鏡場集中控制,快速調整各定日鏡光斑位置。閉環進行跟蹤微調,校正和消除定日鏡累積誤差,實現精準跟蹤。對于因陰雨天或光照強度過低而導致的光電傳感器失效、鏡場能量的優化調度等情況,系統將只進行開環控制,所以開環控制方式也應具有較高的跟蹤精度。
根據太陽運行規律和定日鏡場經緯度等數據,監控計算機實時計算入射太陽光的方位角和高度角,并將定日鏡旋轉目標值發送至定日鏡控制器,控制器輸出脈沖寬度調制(pulse width modulation,PWM)信號,驅動方位角、高度角電機按設定的方向、位置轉動。
在一個控制周期內,當定日鏡角度反饋值與目標值的偏差大于Emax時,定日鏡以快速運行速度Vmax進行快速定位(即開環粗調);當偏差小于Emax時,定日鏡進行開環細調,采用增量式PID算法繼續跟蹤,至此實現開環控制;當定日鏡跟蹤偏差進一步減小至Emin,達到光電傳感器的工作范圍內,并且光照強度高于傳感器正常工作限制,則切換至閉環控制。閉環微調過程采用閉環跟蹤速度Vmin。整個控制周期內采用復合式控制算法,如式(1)所示。當下一次反射太陽光偏離誤差產生后,重復以上控制過程,實現定日鏡精準跟蹤。此外,在閉環控制過程中,如果出現光電傳感器失效、鏡場需要優化調度等情況,即切換至開環控制。
(1)
式中:U為算法輸出值,即步進電機PWM脈沖頻率控制量;Vmax為定日鏡快速移動速度輸出;f(PID)為增量式數字PID算法;Vmin為定日鏡閉環跟蹤速度輸出;E為反饋值與目標值的偏差;Emax和Emin為偏差絕對值的兩個設定閾值。

3 開環控制
開環控制依據反饋值與目標值偏差的絕對值大小分成兩段進行,如式(2)所示。
(2)
當偏差E大于26 mrad時,定日鏡以開環速度Vmax快速達到等待點;當偏差E小于26 mrad時,定日鏡轉換為開環細調,進行變速運行。此時,跟蹤精度成為關鍵指標,采用增量式數字PID算法。
定日鏡跟蹤控制時,采用主從方式,以Modbus遠程終端單元(remote terminal unit,RTU)通信協議實現與監控計算機的通信,通信波特率為9 600 bit/s。監控計算機每隔一定的時間向各定日鏡ID發送命令。命令串中包含定日鏡角度目標值。時間間隔的設置與吸熱器接收靶大小、由定日鏡間歇式運動導致的最大允許漂移誤差以及太陽周日運動角度變化率等因素有關。本文將間隔設置為12 s。
當定日鏡接收到狀態查詢命令時,采用應答方式將定日鏡的運行狀態返回至監控計算機,方便監控計算機分析和處理數據,觀察跟蹤效果。對于定日鏡臺數眾多的鏡場,為方便分組集中管理,可將每20臺定日鏡分為一組,由網絡中繼器連接構成子網。各子網再通過各自的網絡中繼器與監控計算機相連。
4 閉環控制
光電傳感器主要由凸透鏡、鏡筒、光電池、金屬外殼等部件組成[9]。
4.1 光電傳感器設計
光電池布置采用四象限法則[10]。將四片性能、參數相同的光電池分別安裝在鏡筒底部的Ⅰ、Ⅱ、Ⅲ和Ⅳ四個象限內,如圖2所示。光電池Ⅰ、Ⅱ、Ⅲ和Ⅳ由隔板隔開,分別代表東、北、西、南四個方向。

圖2 光電池布置圖
在光電池前放置長度可調的鏡筒,并將凸透鏡放置在鏡筒前端。當光線平行于光軸(透鏡法線方向)射入凸透鏡時,合理調節鏡筒的長度,使光斑均勻落在四片光電池上,則此時各光電池輸出電流大小相等。當光線與光軸成φ角入射時,在四片光電池上形成的光斑必然發生偏移。光線與光軸不平行時的光斑如圖3所示。光線照到的地方用陰影部分表示。此時光斑不再等面積地覆蓋在四片光電池上,各光電池產生的光電流也不再相等。這時,控制器經過A/D轉化模塊采樣經過信號放大的光電壓信號[11-12],并經過比較算法,驅動方位角電機和高度角電機動作,直到Ⅰ、Ⅲ象限和Ⅱ、Ⅳ象限光電池輸出的光電壓相等或電壓差在誤差范圍內,即太陽光線與透鏡光軸平行,電機停止運行。Ⅰ、Ⅲ象限電壓差控制方位角電機運轉,Ⅱ、Ⅳ象限電壓差控制高度角電機運轉。

圖3 光線與光軸不平行時的光斑圖
鏡筒的長度決定了閉環控制運行時的角度范圍,即跟蹤系統切入閉環控制的角度閾值。光電傳感器的精度決定了閉環跟蹤運行時的位置精度。因此,當閉環控制時,能夠比較容易地提高跟蹤系統的精確度。
本文設計的光電傳感器,鏡筒長200 mm,光電池直徑為24 mm;凸透鏡參數為厚度5 mm,直徑為24 mm,焦距為800 mm。當太陽光線平行于光軸入射時,形成的光斑直徑d為:
(3)

為了克服云遮工況或者早晨太陽升起以及太陽落山等工況造成的光照強度過低、閉環控制失效等情況,控制器在采樣電壓信號的同時,對光電流強度進行測量。當光照強度低于設定閾值,控制系統切入開環控制。
4.2 跟蹤精度分析
圓形光斑移動圖如圖4所示[9]。當太陽光斑圓心落在光電池中心O點時,Ⅰ、Ⅲ象限面積之差為零,Ⅱ、Ⅳ象限面積之差為零,則東西方向和南北方向電壓差為零。
假設光斑隨著太陽光線的偏移以近似圓形移動,并且圓形光斑半徑為r。當光斑移動Δx時(如圖4所示),光斑落在第Ⅰ象限的面積為扇形SCOD,光斑落在第Ⅲ象限的面積為扇形SAOB。

圖4 圓形光斑移動圖
圖4中,點A、B、C、D為光斑移動后與各象限邊界的交點。設∠OAO′=θ,則根據圖中對應關系,∠BCO′=∠O′BC=∠OAO′=θ。由圖4可得出以下公式:
(5)
(6)
所以,扇形SCOD和SAOB的面積之差y可表示為:
(7)

(8)
則面積變化率表示為:
(9)

(10)
光電池的半徑r0=12 mm。在此選擇光電池的開路電壓U0=650 mV,則Ⅰ、Ⅲ象限的電壓差ΔU變化最大值為:
(11)

5 定日鏡控制程序設計
跟蹤流程如圖5所示。圖5中,E(k)為定日鏡角度目標值和反饋值之間的偏差。控制切換條件為:當光電傳感器失效、鏡場優化調度時,閉環控制切換至開環控制。

圖5 跟蹤流程圖
6 跟蹤精度測量
對所設計的定日鏡跟蹤系統進行了測試。首先,測量定日鏡對應焦距f,選定測試時間段,繪制接收靶刻度。然后,設置定日鏡為接收靶跟蹤狀態,每隔5 min利用光斑采集系統捕捉對應時刻的光斑圖像,利用軟件確定光斑中心點。光斑直徑以90%能量集中范圍來限定。

測試選址在南京江寧(北緯31.98°,東經118.83°),時間為2016年8月20日,當地年平均氣溫為15.5℃,年平均大氣壓為1 015.4 hPa,海拔高度為8.9 m[12]。根據上述數據,實時計算當天當地的太陽高度角和方位角。對應的開環控制和閉環控制測試的結果如表1所示。檢測條件為:風速<4 m/s,f=50 m。由表1可知,本文設計的定日鏡控制系統開環控制精度優于3.5 mrad,閉環跟蹤精度優于1 mrad。

表1 控制精度測試結果
7 結束語
本文設計了基于開-閉環結合控制方式的定日鏡跟蹤裝置,提出了復合控制策略,有效克服了開環、閉環單獨控制方式的各自缺點,實現了定日鏡的高效、精準、穩定跟蹤。在試驗測試中,該定日鏡控制不僅開環精度優于3.5 mrad,閉環跟蹤精度優于1 mrad,而且定日鏡與監控計算機實時通信,實現了開、閉環方式的自動、無擾切換,達到了預期研究效果,具有很高的推廣應用價值。
