玉米播種與測控技術研究進展
2018-09-17 06:49:18苑嚴偉白慧娟方憲法王德成周利明
農業機械學報 2018年9期
關鍵詞:深度
苑嚴偉 白慧娟 方憲法, 王德成 周利明 牛 康
(1.中國農業機械化科學研究院土壤植物機器系統技術國家重點實驗室, 北京 100083;2.中國農業大學工學院, 北京 100083)
0 引言
提高玉米播種質量是提高玉米產量的關鍵途徑,目前,主要通過精密播種技術提高玉米播種質量。玉米精密播種技術是將定量的玉米種子,按照農藝要求的行距、株距和播種深度進行穴播,同時按照農藝要求的種肥間距,進行種肥深施[1]。精密播種技術可以提高玉米植株田間分布的均勻性,最大限度地減小植株間對土壤水分、養分的競爭,從而提高產量[2]。
精密播種技術主要通過玉米播種機來實現。為了提升播種機的性能,國內學者進行了大量研究,對排種器的結構進行優化設計(排種盤型孔數、型孔結構、型孔直徑等)[3-12],優選播種機的作業參數(如排種盤的氣壓、轉速、播種機作業速度等)[11,13-15],優化導種管的結構[13,16],優選開溝器[17],探索播種機作業狀態的改變對播種機性能的影響[18]等。目前,國內播種機在機械結構與性能方面與國外的差距已明顯縮小,然而,在智能化程度上還遠遠落后。國內播種機排種器采用地輪驅動較多,研究表明高速作業時排種性能會大幅度下降[19-20],而采用電動機驅動播種單體時,播種性能優于地輪驅動[21-23];播種機上幾乎沒有安裝排種測控設備,故障診斷仍然依靠人來完成;播種機仍主要依靠導種管導種,高速時無法實現穩著床,株距一致性差;播種機仿形和播深調節仍然主要依靠平行四桿、機械彈簧和限深輪結合的方式,播深一致性有待提高。而針對以上問題,國外知名農機企業(如美國John Deere、Precision Planting公司等)不僅有智能化解決方案,其先進的播種機產品也已經進入市場,引領了播種機的發展方向。目前,高速、高精度是播種機的發展趨勢,單靠機械性能的提升無法滿足高速時的高精度要求,在先進的播種技術的基礎上采用測控技術是解決以上問題的新途徑,也是提升播種機智能化水平的必然要求。
玉米播種機不僅要追求高速、高精度的發展方向,也要符合精準農業的發展要求。精準農業概念產生于20世紀90年代初,逐漸成為當今世界農業發展的新潮流,其基本內涵是根據土壤肥力和作物生長狀況的空間差異,調節對作物的投入,實現各類農業資源的高效利用,獲得高效益[24]。精密播種是精準農業的關鍵環節,精準農業背景下的精密播種是把播種機和作業環境同時作為研究對象,基于氣象信息、土壤特性等進行變量播種,前提是信息的快速獲取,這都依賴于傳感器等測控技術的發展。
目前,我國玉米播種機的速度、精度和智能化水平均較發達國家還有一定差距,必須針對各項關鍵技術逐項突破。玉米精密播種過程是一個系統工程,包括排種、投種、著床3個主要環節,各環節緊密關聯,互相影響。要獲得較高的播種性能,即好的合格指數、重播指數、漏播指數和種距變異系數等[25],必須追求每一個環節的精密,從而必須提升每一個環節的播種與測控水平。本文圍繞玉米播種全過程,綜述排種、投種、著床3個環節中播種與測控技術的國內外研究及應用現狀,總結國內差距所在,指出國內玉米播種技術未來的發展方向。
1 精密排種與測控技術
為實現精密播種,首先在排種環節提供均勻有序的單粒化種子流,使其既不重播,也不漏播。排種器是排種環節的核心部件,需按照設定的農藝要求提供單粒化的種子流。目前,排種器的研究成果比較多,除研發了多種類型的排種器外,還發現了很多有價值的規律[26],并且每一條規律已經被多次證明,這些研究成果可以用于指導生產實際,排種器已經實現了穩定且高速地排種[27]。然而,排種器驅動方式也會影響排種精度,傳統的排種器由地輪通過一系列的機械傳動來驅動,具有一定的局限性,采用新型的驅動系統驅動排種器逐漸成為發展趨勢[19]。這些新型的驅動系統具體是根據采集的播種機作業速度信號控制驅動系統(液壓馬達、電動機等)的轉速,從而實現對排種器轉速的精確控制。采集播種機作業速度信號的方法有增量式光碼盤脈沖個數測速、電磁式轉速傳感器測速、開關型霍爾傳感器測速、GPS測速、北斗導航系統測速等。新型排種驅動系統不僅提高了排種精度,也為變量播種技術的實現提供了可能。目前,排種環節的研究包括針對排種器本身性能的研究、排種驅動技術的研究、變量播種技術的研究。后兩個方面是排種環節的新課題,逐漸受到廣泛關注。
1.1 排種驅動技術
玉米播種機播種質量不僅取決于排種器的性能,還受到排種器驅動方式的影響。目前,Maschio、Kinze、Horsch、Precision Planting、John Deere等知名農機企業中,地輪驅動、液壓驅動、電動機驅動等驅動方式都有應用,用戶可以選配。而國內企業生產的播種機仍以地輪驅動為主。
傳統的排種器驅動方式是地輪通過鏈傳動驅動,地輪是驅動排種器的動力源。如圖1所示,地輪通過一系列機械傳動將動力傳遞給排種器。隨著作業速度的提升,地輪的滑移以及鏈傳動的不穩定性也會增加。AYKAS等[28]和YAL?IN等[29]的研究表明,不同播種機的地輪滑移程度為6.08%~8.77%。另外,在采用地輪驅動方式的情況下,排種速率不能實現大范圍的無級調速,無法實現播種量快速且準確的調節[19]。
自20世紀80年代起,出現了液壓馬達驅動、電動機驅動等地輪驅動的替代方案。液壓馬達驅動是以液壓馬達作為動力源驅動排種器,通過不同的傳動方式將動力從液壓馬達傳遞到排種器。如圖2所示,是兩種不同的液壓馬達驅動方案[30]。

圖1 地輪驅動排種器Fig.1 Ground wheel drives seed meter

圖2 液壓馬達驅動方案Fig.2 Hydraulic motor driving program
意大利Maschio公司用液壓馬達驅動傳動主軸,再通過萬向節將傳動主軸的動力分配給各播種單體[31],如圖3所示。

圖3 液壓馬達驅動排種器Fig.3 Hydraulic motor drives seed meter
電動機驅動是以電動機作為動力源驅動排種器,一般地,一個播種單體由一臺電動機驅動。如圖4所示,Precision Planting公司采用電動機直接驅動排種器[32]。

圖4 電動機驅動排種器Fig.4 Motor drives seed meter
表1對各種驅動方式的動力源、優缺點進行了比較,并列舉了各種驅動系統的代表機型。
目前,電驅排種方式在國內外都是研究的熱點,在國內主要處于實驗室階段,產品化仍處于起步階段[26]。采用電驅排種技術,主要是采用電動機替代機械傳動結構,直接驅動排種器,可以基于播種機的作業速度和設定的株距信息,實時地調節電動機的轉速,從而實時調節排種器轉速,使排種速率和播種機的作業速度相匹配,達到較高的排種精度。YANG等[23]設計了一款玉米播種機的開環控制和驅動系統,采用步進電動機和齒輪傳動驅動排種器,提高了排種盤轉動的穩定性,同時也降低了對電動機最大輸出扭矩的要求,地輪的作業速度通過編碼器實時測量。HE等[21]、張春嶺等[33]在楊麗等研究的基礎上,針對步進電動機高速時的低扭矩特點,設計了基于直流電動機驅動的閉環控制系統,實現對電動機轉速的控制。CAY等[19,22]比較了電驅排種和地輪驅動的播種機性能,認為傳統的地輪驅動方式可以用電驅方式取代,同時發現影響種距一致性的主要因素是排種盤的旋轉速度和種盤上的型孔數。

表1 各類排種驅動方式的比較Tab.1 Comparison between driving modes of seed meters
在產品化方面,德國Horsch公司的播種機采用電驅排種系統,通過減速器直接驅動排種器[34],但是排種系統沿排種軸方向的尺寸較大,如圖5所示。
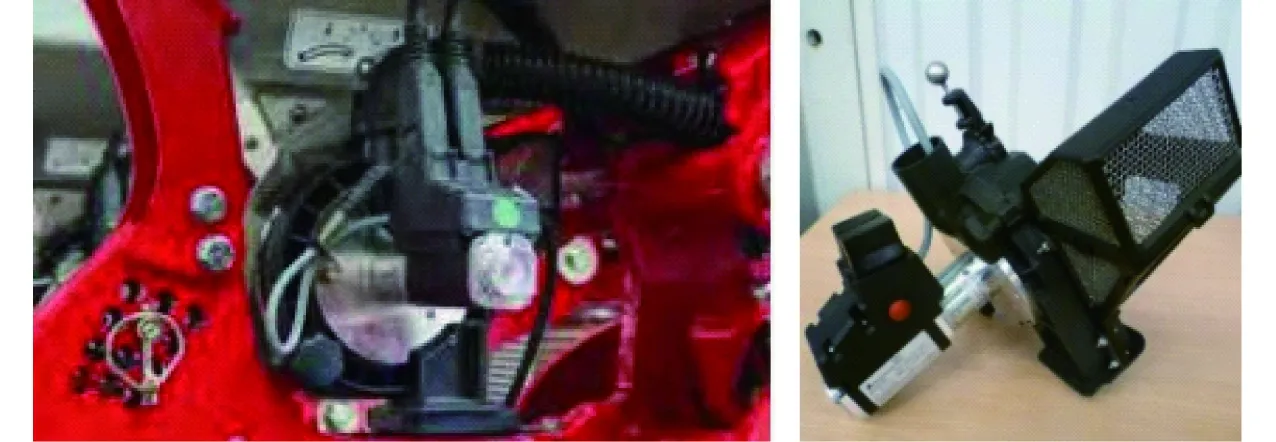
圖5 Horsch電驅排種系統Fig.5 Electric drive seeding system of Horsch
Precision Planting公司的電驅排種系統采用了齒輪嚙合的方式將電動機的動力傳遞給排種器[35],減小了排種器整體尺寸,如圖6所示。
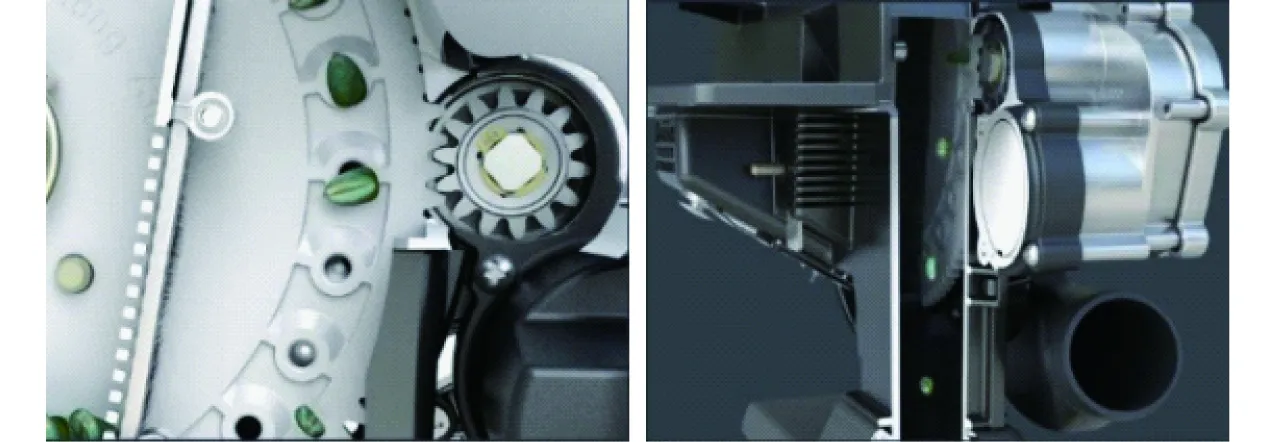
圖6 Precision Planting電驅排種系統Fig.6 Electric drive seeding system of Precision Planting
采用電驅排種系統不僅可以提高排種精度,適應高速播種作業,而且能夠實現對每一路播種單元的單獨啟停控制。Precision Planting的播種機采用了電驅排種系統,在曲線地塊作業時,可以對內行和外行的播種單體獨立控制,使內行的速度低于外行的速度,最終實現播種的均勻性,如圖7所示[36]。

圖7 Precision Planting曲線補償Fig.7 Curve compensation of Precision Planting
1.2 變量播種技術
傳統的精密播種技術缺少對具體作業環境的考慮,采用粗放型的平均化投入方式,保證種量一致、種距一致、播深一致,限制了田塊最大潛力的發揮。變量播種是在精準農業背景下對精密播種技術提出的新要求[24],即基于田塊小區土壤特性差異,調節播種量、播種密度和播種深度,充分發揮土地潛力,實現產量和收益最大化。LOWENBERG-DEBOER[37]的試驗研究表明,在土壤肥沃的地方采用大的播種密度,在土壤貧瘠的地方采用小的播種密度,可以提高產量。
變量播種技術目前僅限于研究和示范,實際應用非常有限。BULLOCK等[38]進行了變量播種試驗,把產量的影響因素總結為:①在作物的生長期基本不變的常量因素,稱之為小區特性,如土壤質地、坡度等。②可控因素,稱之為生產物料的施用率,如種子、肥料、農藥等。③不可控制的隨機因素,如氣候等。試驗表明,變量播種獲得收益的前提是了解小區特性對播種密度和產量的影響機制,需要進行長期、大量、廣泛的試驗,獲得精確的播種處方圖。LICHT等[39]基于土壤特性和地形特征進行了玉米變量播種的田間試驗,歷時3個生長季,選擇了土壤特性有明顯差異的3個區,一共獲得9個試驗結果,但最終結果并不理想,只有5個試驗結果得到了最優的播種速率,其中只有3個試驗結果具有分析的價值。試驗結果表明,由于播種速率對氣候因素和田間特性的變異性的響應,以及各因素之間的交互作用,根據田間土壤特性和地形變量來尋求最優播種率的方法很難實現。因此,需要針對不同的小區分別進行變量播種試驗,探索各個小區的變量播種規律,生成各自的處方圖。
目前,播種領域的變量作業主要基于土壤肥力和產量生成的施肥處方圖進行變量施肥,而少有變量播種的報道。市場上的變量施肥播種機實質上都是變量施肥機和播種機的組合,如凱斯的Flexi-Coil變量播種機,可以基于施肥處方圖,利用變量控制器控制電液伺服馬達的轉速,從而實時調節施肥量[40]。然而,由于通過傳感器實時檢測獲取土壤養分圖的方法尚不成熟,土壤養分圖獲取仍然依靠土壤采樣,不僅耗時耗力,成本高,而且獲取的數據量有限。
變量播種的核心內容是變量播種處方圖和變量播種機。變量播種處方圖的獲取是一個難點,目前仍未解決。變量播種機的技術關鍵在于可以實時地調節排種速率,可以通過液壓馬達或電驅排種技術實現。由于變量播種處方圖獲取的難度較大,變量播種技術的應用受到限制。
2 平穩投種與測控技術
投種技術是實現玉米精密播種的一項關鍵技術,投種過程是指玉米種子從排種器出口到達種溝的過程。傳統的播種機一般采用曲形導種管進行投種,結構簡單,安裝方便,種子離開排種盤后在重力的作用下沿著導種管下落,到達種溝,在此過程中,種子與排種管壁發生碰撞,到達種溝時發生彈跳,在高速播種的情況下,彈跳更加劇烈,這會影響播種的均勻性,進而影響產量。因此,投種技術的研究也一直是精密播種領域的研究課題之一。由于播種作業環境復雜,需要播種質量監測設備實現漏播報警,預防缺苗減產,而排種器的結構比較復雜、緊湊,安裝監控模塊難度大,通常安裝在結構較為簡單的投種裝置上,對投種過程中單粒化的種子流進行監控。本節主要對投種技術及投種過程涉及到的測控技術進行闡述。
2.1 平穩投種技術
為了實現精密播種,學者提出了零速投種、點播式投種、帶式投種和氣力式投射等多種方式。
佟超[41]闡述了零速投種理論,即保證種子落入種床的瞬間相對地面速度接近于零。零速投種主要有“重力投種”和“二次投種”兩種方式,“重力投種”是指排種口排出的種子在重力作用下下落,途經曲形導種管,獲得與播種機作業速度大小相等、方向相反的水平分速度。“二次投種”是將排種口排出的種子再通過機械作用向播種機前進的相反方向加速,使種子在投種時獲得與播種機前進方向相反、大小相等的水平分速度。導種管是利用“重力投種”方式實現“零速投種”的主要部件,主要采用后彎拋物線的形式,距地面一定高度,連接在排種口,可以抵消掉種子在播種機前進方向的分速度,減少種子落入種溝的彈跳現象,提高播種精度。KOCHER等[13]以John Deere MaxEmerge Plus Vacumeter Planter的新舊導種管為試驗對象,進行了播種性能對比試驗,發現新導種管的播種性能更好,主要是由于新導種管內壁光滑,舊導種管內壁粗糙。YAZGI[16]在不同的作業速度和理論種距的試驗條件下,研究了不同的導種管形狀對排種性能的影響,就排種合格率而言,塑料波紋管式導種管的性能比金屬光滑面差很多。劉立晶等[42]基于對進口導種管結構的逆向工程設計,設計了一款新型導種管,進行了無導種管、進口導種管、新型導種管的性能對比試驗,試驗結果表明,導種管的使用優于無導種管的情況。導種管的設計需要考慮多種因素,如:直線段部分長度、直線段部分與水平方向夾角、圓弧部分曲率、圓弧圓心角、截面面積和粗糙度等,這些因素都會影響排種性能,在排種盤適當的轉速下,合理的導種管結構和精密的排種器配合,可以實現零速投種。導種管作為投種裝置,在排種盤轉速較低時,種子貼著導種管壁排出,管內碰撞少,種子落入種溝時彈跳小,隨著排種盤轉速增高,種子在導種管內的碰撞增多,種子排出導種管的軌跡無法預測,因此,導種管具有一定的局限性。
點播式投種方式是指利用與地面垂直的往復式投種機構將種子直接送進種溝。魏宏安等[43]設計了垂直插入式小麥覆膜穴播機,采用轉筒結構,運用平行四桿機構原理,實現了成穴器——鴨嘴的直立接種、垂直入土和出土;李復輝等[44]設計了舵輪式玉米免耕精量施肥播種機,其關鍵部件舵輪既是行走輪又是投種器,縮短了投種行程,可直接把種子送到土壤中。點播式投種方式,實質是用點播的方式讓土壤包圍種子,由于種子受到土壤的摩擦力,從而消除了落入種溝時的彈跳,該投種方式能夠保證種距的一致性,但其無法實現高速作業。
帶式投種技術是目前先進的投種技術之一,其通過傳送帶將種子從排種器出口運輸到較低的投種高度后投種。美國John Deere公司研發了毛刷導種帶,種子從氣吸式排種器排出后,粘附在導種帶上,導種帶柔性夾持種子并攜種子運動,到達較低投種位置時投種,精確地把種子排在種溝底部,實現零速投種[45-46],如圖8所示;美國Precision Planting公司2014年研發了由步進電動機驅動的“SpeedTube”投種系統,可安裝在該公司生產的“vSet”氣吸式排種器上,一對齒形喂入輪相對旋轉將排種盤吸孔上的種子“摘”下,送入到輸種帶的葉片隔腔中,種子在輸種帶葉片高速推壓下從播種單體的上端輸送到接近種溝的位置,然后被葉片拋出,“零速”落入種溝,該輸種系統可將播種機作業速度提高至16 km/h,且能夠較好地保持株距一致性,而且輸種帶的傳動速度隨著播種機前進速度的變化而變化[47],如圖9所示。采用帶式投種方式,可對種子在排種器與種溝之間的行程進行很大程度地控制,降低最終的投種高度,縮短種子的自由運動行程,從而減少種子運動的不確定性,減少種子在種溝的彈跳,能夠實現精密播種機的高速作業。
氣力式投射方式是指利用正壓氣流將排種器口的種子吹到種溝中,氣流對種子的作用力,減少了種子的自由運動,從而實現對種子運動軌跡的控制。呂金慶等[48]以氣吸式馬鈴薯排種器為研究對象,利用正壓氣流對下落的種子施加與播種機前進方向相反的作用力,以實現零速投種,結構如圖10所示。荷蘭Lockwood公司的馬鈴薯播種機采用了相同排種原理的排種器[49],如圖11所示。瑞典V?derstad公司的Tempo播種機播種速度超過了20 km/h,種植深度精度為±0.5 cm,重播率為0.35%,漏播率為1.21%,平均播種精度為98.5%,株距變異系數為24.3%,在作業速度達到17 km/h時,播種機的變異系數通常接近20%。高速作業時可以實現高精度播種,主要取決于加壓排種器的設計,其中采用了力量投射技術,利用氣壓對種子從排種器落入土壤的整個過程進行完全的控制[50],其排種管結構如圖12所示。
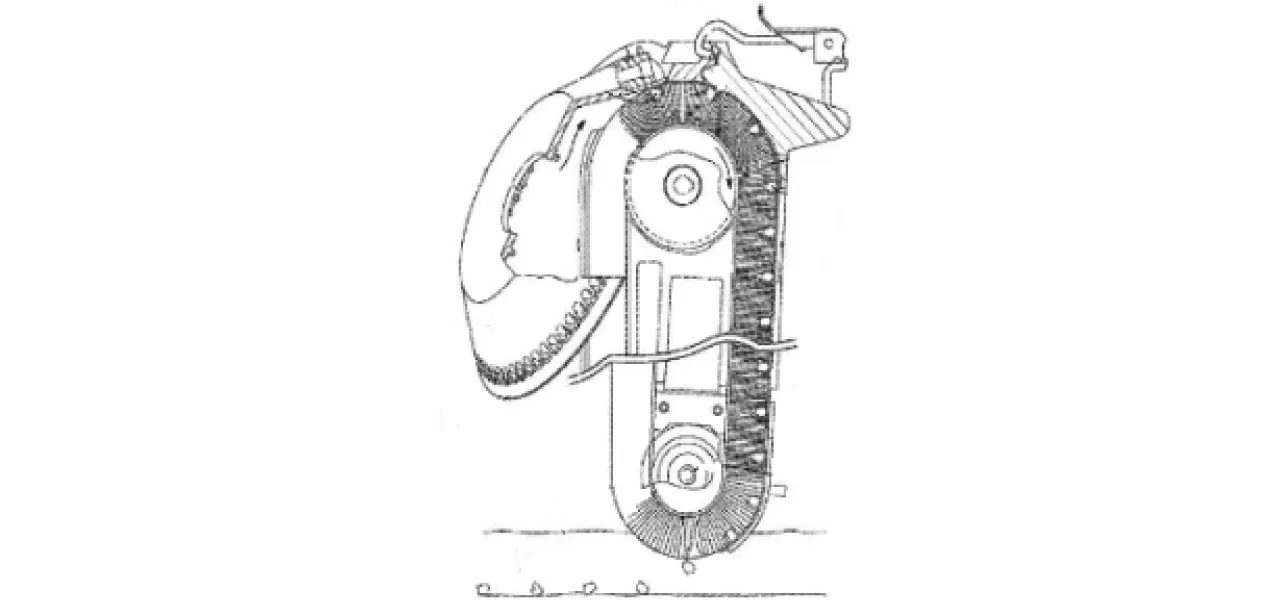
圖8 John Deere導種帶Fig.8 Seed-guiding belt of John Deere

圖9 SpeedTube投種系統Fig.9 SpeedTube seed-guiding system
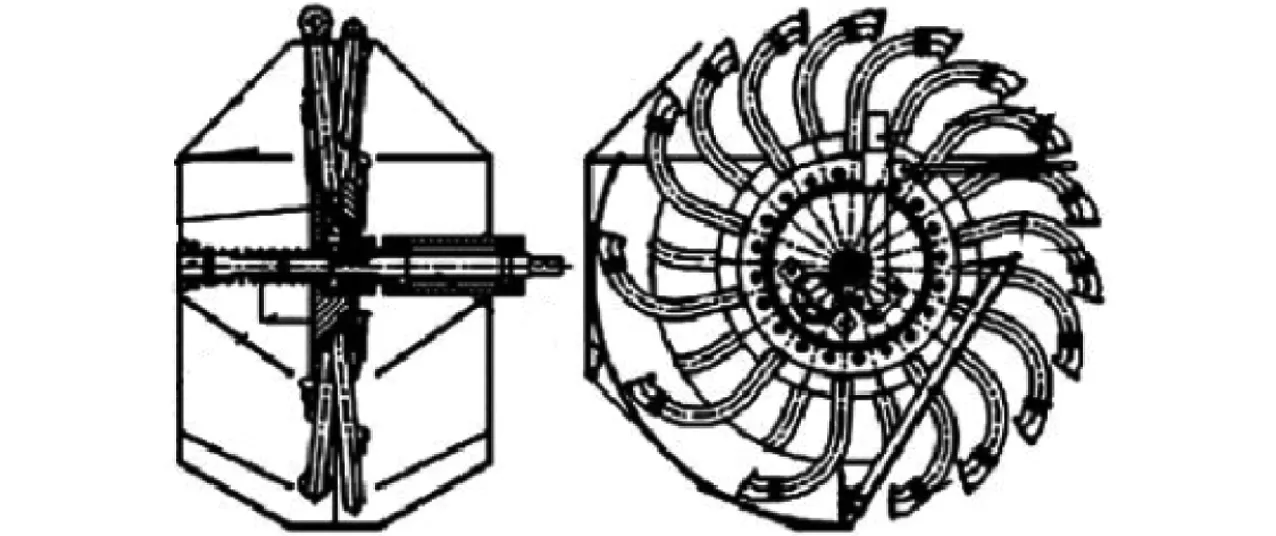
圖10 正壓氣流式排種器結構圖Fig.10 Structure of seed meter with flowing positive pressure air

圖11 Lockwood馬鈴薯排種器Fig.11 Potato seedmeter of Lockwood

圖12 V?derstad投種裝置Fig.12 Seed-guiding device of V?derstad
2.2 投種過程中的測控技術
黏油帶法是傳統的排種器性能檢測方法[51],由于可獲得的樣本數量有限,浪費種子,污染環境,耗時耗力,近年來,逐漸被智能化檢測的手段所取代。投種過程中的檢測技術是用傳感器、高速攝像機等手段代替人監測種子流的狀態,實時地獲取排種器的作業狀態,在線評估排種性能,并在問題出現時發出報警信號,提醒人采取調整措施或進行自動調整。投種過程中的測控技術有兩方面的應用,一方面用于試驗室條件下,對排種器的性能進行檢測,另一方面用于田間作業環境下,對播種機的性能進行實時監測,以避免播種機在復雜多變的田間作業環境下性能下降。目前,播種機的性能指標主要有排種性能的合格指數、重播指數、漏播指數和種距變異系數等[25],均是以種距或株距的測量為基礎。
目前,對種子流的檢測技術主要有基于光電傳感器的檢測技術和基于高速攝像與圖像處理的檢測技術。
2.2.1基于光電傳感器的檢測技術
采用光電傳感器方式的檢測系統主要由光電傳感器、速度傳感器、控制器和顯示終端組成,結構組成如圖13所示[2]。
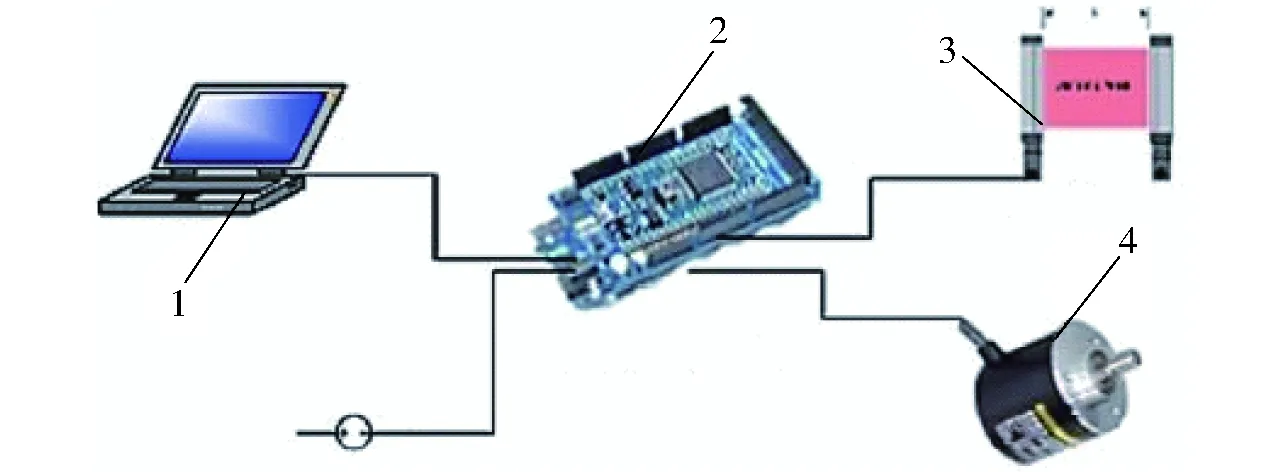
圖13 光電檢測系統方案圖Fig.13 Scheme diagram of photoelectric monitoring system1.顯示終端 2.控制器 3.光電傳感器 4.速度傳感器
光電傳感器用于監測種子流的狀態,一般由發射端的光源和接收端的敏感元件組成,發射端和接收端相對安裝在投種區域的兩側,形成監測區域,排種器排出的種子經過此區域時,光電傳感器可以實時監測種子流的狀態。光電傳感器的工作原理是:光源發出光線,由敏感元件接收光線,排種過程中,種子經過監測區域時,會遮擋發射端光源發出的光線,觸發接收端發出電平信號,進而得到相鄰兩粒種子下落的時間間隔。Horsch公司將光電傳感器安裝在導種管上,監測種子的通過狀態,如圖14所示。
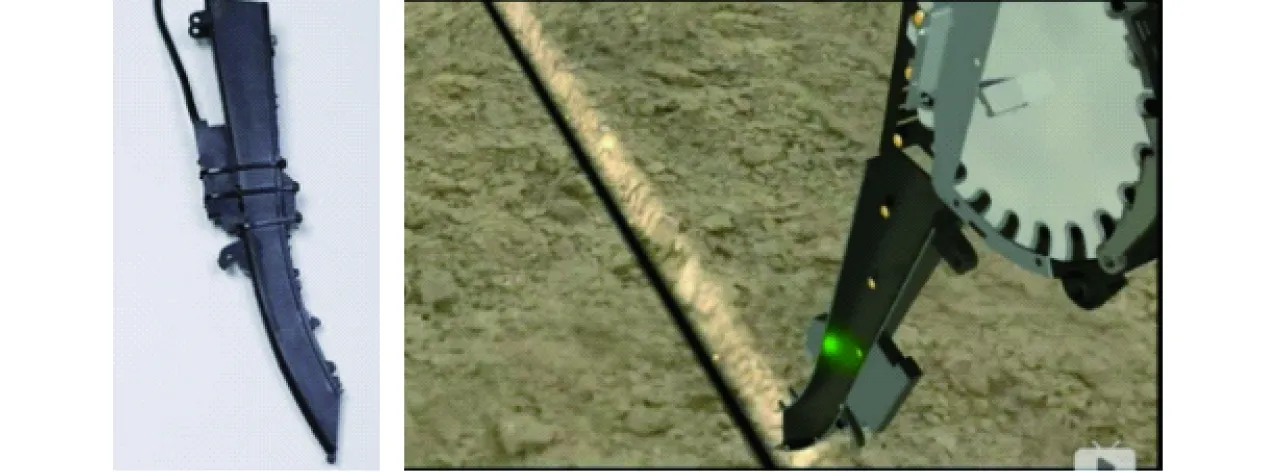
圖14 Horsch光電傳感器Fig.14 Photoelectric sensor of Horsch
John Deere公司將傳感器安裝在溝槽式輸送系統上,種子在輸送系統的夾持下通過傳感器時,和輸送系統處于相對靜止狀態,傳感器獲得的信號會非常準確,并將信號傳給控制器,如圖15所示[52]。對于光電傳感器的導種管配置和導種帶配置方式,前者在排種速率增加時,會漏掉一些種子,最后需要對記錄結果進行調整,后者的記錄結果更準確。

圖15 John Deere溝槽式輸送系統與傳感器Fig.15 Reflective seed sensor and sensor on trench-delivery system of John Deere
播種機性能監測中使用的光電傳感器包括光纖傳感器、光敏電阻傳感器、紅外線傳感器、激光傳感器等。最近幾年,使用光纖傳感器監測小粒種子(如黑麥、油菜、谷物)播種機性能的研究較多[53-55],主要以監測播量和排種性能為主,這些播種機多是采用外槽輪排種器,種子呈柱狀流出,研究表明采用光纖傳感器的監測系統有較高的測量精度。而玉米播種機性能監測系統一般采用光敏電阻傳感器、紅外線傳感器和激光傳感器等。光敏傳感器接收端采用光敏電阻,發射端的光源類型不固定;紅外線傳感器發射端的光源采用紅外發光二極管,接收端的敏感元件類型不固定;激光傳感器發射端的光源采用激光二極管,接收端的敏感元件類型不固定。光電傳感器發射端的光源一般包括紅外發光二極管、發光二極管和激光二極管,接收端的敏感元件主要包括光敏二極管、光敏三極管、光敏電阻和硅光電池。因此,通過不同的組合可以組成多種傳感器。
文獻[56-58]均采用發光二極管和光敏電阻分別作為發光元件和光敏元件,組成光敏電阻傳感器,實時監測播種機的作業狀態,并在監測到故障時發出報警信號。文獻[59-60]采用近紅外發光二極管和光敏三極管組成傳感器,監測排種器的性能,并與黏油帶系統的監測結果進行了對比,兩者相關系數為0.951。金衡模等[61]設計了玉米精播機漏播補償系統,采用兩組傳感器分別用于原播種系統和補播系統的性能監測,兩組傳感器分別是紅外發光二極管和光敏三極管的組合、發光二極管和光敏電阻的組合。XIA等[62]采用3~4組紅外發光二極管和光敏三極管在排種管上均勻對稱地配置,實時地監控播種機的性能,并能進行光電報警。OKOPNIK等[63]采用DFRobot RB-DFR-49紅外線傳感器檢測種距,紅外發光二極管和紅外光電二極管之間形成三維監測區域,當種子通過監測區域時,種子反射的紅外線會激發紅外光電傳感器產生5 V的高平信號,當種子在監測區域之外時,接收端輸出0 V的低平信號,通過改變光電傳感器與皮帶表面的距離來調整監測區域的大小。史智興等[64-65]采用激光二極管和硅光電池設計了激光束柵格光電傳感器和雙路激光逆向直射光電傳感器,改善了傳感器對落種的覆蓋性能,減少了漏檢。宋鵬等[66]采用一字線激光器和緊密排列的貼片光敏二極管作為光電傳感器的發射端和接收端,監測排種器的性能。表2為幾種不同結構的傳感器,為了提高傳感器的覆蓋性能,一方面盡量使光束的直徑小于種子的尺寸,避免種子從光束內部通過,無法完整遮擋光束,另一方面使傳感器的監測區域對種子的通過區域進行全覆蓋,避免漏檢。
KARIMI等[69]對光敏電阻傳感器、紅外線傳感器、激光傳感器3種非接觸式種子流量檢測技術進行了對比試驗,3種傳感器的原理如圖16所示,試驗結果表明,紅外線傳感器的檢測結果與電子秤的測量結果最接近,綜合比較得出,紅外線傳感器是光電檢測系統的較優選擇。
光電傳感器具有很多優點,適用于漏播檢測,具有高的測量靈敏性、快的測量速度,成本低,數據采集和使用都很方便[2]。然而,也有一些缺點,對于重播檢測,當種子顆粒較小、播種速度較快時,誤差較大,也無法檢測種子破碎率。周利明等[70]針對現有的光電傳感器較難監測重播的情況,基于微電容信號獲取與分析的方法,設計了電容傳感器,由電容傳感器獲取種子運動信息,利用峰值搜索方法獲取所捕獲的相鄰2個籽粒脈沖的時間間隔及脈沖積分面積,實現對排種性能的監測,特別能檢測出兩粒種子同時下落的情況。

表2 各類應用于播種機性能檢測系統的光電傳感器的對比Tab.2 Comparison between photoelectric sensors applied to planters’ performance monitoring system
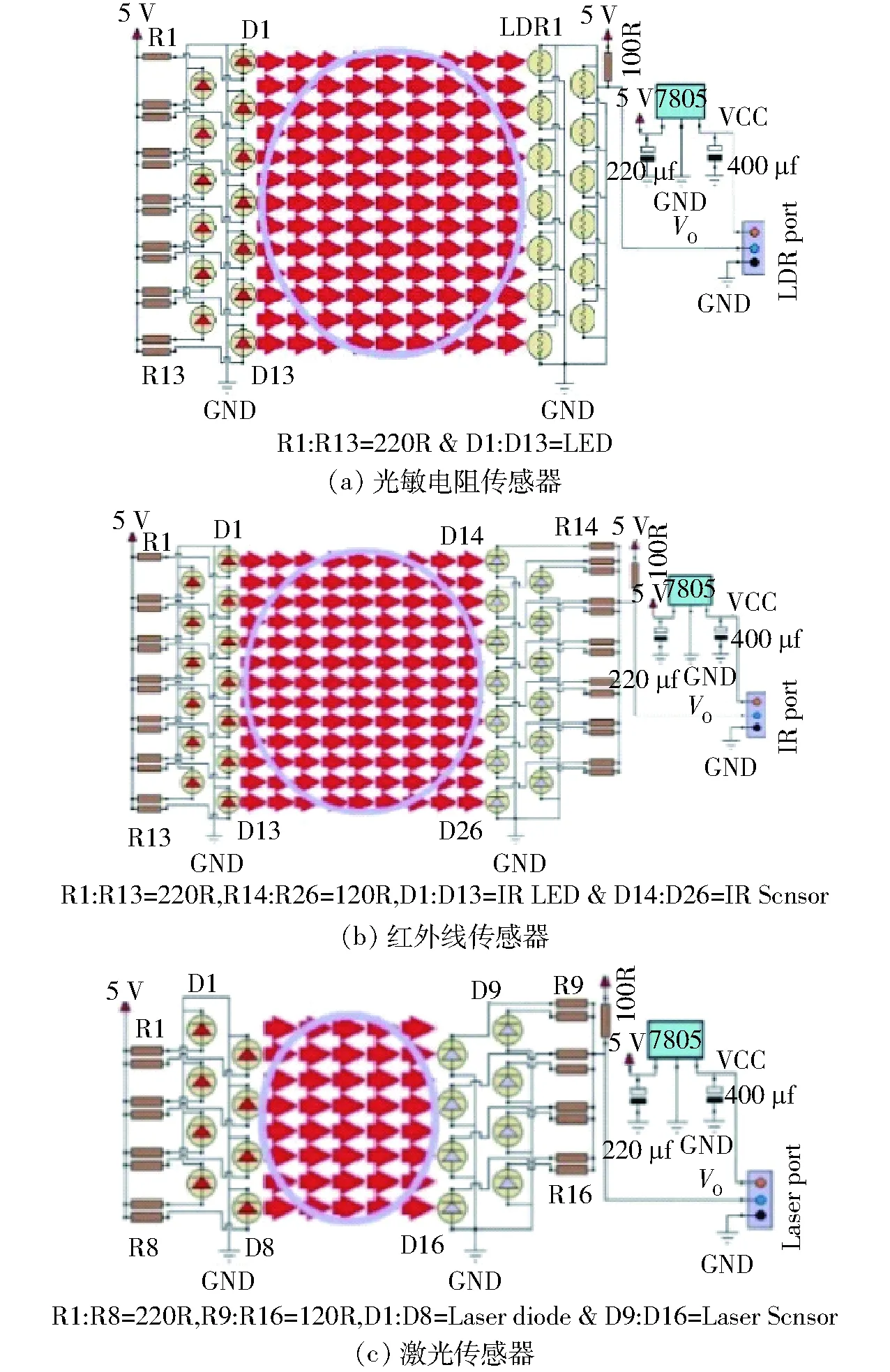
圖16 各類光電傳感器原理圖Fig.16 Schematic diagram of various photoelectric sensors
2.2.2基于高速攝像和圖像處理的檢測技術
基于高速攝像和圖像處理技術的檢測系統包括高速攝像機、圖像采集卡、照明系統、計算機等部分[71-74],方案如圖17所示[75]。
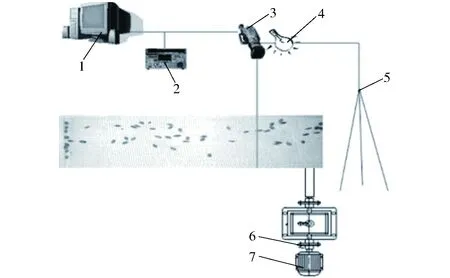
圖17 基于高速攝像和圖像處理的檢測系統方案Fig.17 Detection system scheme based on high-speed camera and image processing1.計算機 2.圖像采集卡 3.高速攝像機 4.照明系統 5.三腳架 6.編碼器 7.電動機
高速攝像機用于對排種器排出的種子流進行圖像采集,需要有較高的檢測速度,以及較高的成像質量和分辨率,如CCD相機等;圖像采集卡用于將攝像機拍攝的圖像傳輸給計算機,應具有較高的傳輸速率,并能快速進行A/D轉換;照明系統用于為攝像提供一個良好的光照環境;計算機具有人機交互接口,用于顯示、存儲圖像,并借助專門的圖像處理軟件處理和分析圖像。
當前,關于高速攝像和圖像處理檢測技術的研究較多。陳進等[76]提出了采用此檢測方式分析種子破碎和重播情況的方法,將圖像像素點的面積和與設定的單粒種子的面積范圍比較,若小于最小值,則發生了破碎,認為是漏播,若大于最大值,則認為是重播。NAVID等[77]利用圖像處理技術對番茄種子排種器的性能進行了檢測,并與傳統的黏油帶檢測方式進行了對比,發現黏油帶方式的測量值和種距的設定值有較好的一致性,而采用圖像處理檢測方式的測量值與種距的設定值有一定的差異,且兩種檢測方式測得的種距值具有線性關系,兩種檢測方式測量值的差異是由種子下落時的狀態導致的,圖像處理的檢測方式是在假定種子自由落體的情況下獲得種距值,而黏油帶的測量值是真實情況下的種距值,如果要用圖像處理方式的測量值代替黏油帶方式的測量值,則需要采用程序進行調節。AKDEMIR等[75]研發了播種機室內性能檢測的圖像分析系統,采用兩臺攝像機,一臺對落種過程進行監測,用于計數,一臺對傳送帶上的種子進行監測,用于計算種距。MANGUS等[18]采用了高速攝像和圖像處理技術去測量播種機不同作業狀態下(加速、減速、轉彎等)的速度和單粒率,并與光電傳感器的檢測結果進行了對比,誤差率為(0.8 ± 0.2)%,從而驗證了高速攝像和圖像處理檢測技術的可行性,該方式與其他高速攝像檢測方式的不同之處在于,提前對排種盤上的型孔進行標定,作業過程中,對轉動的型孔依次進行高速攝像,圖像只有以下4種情況:型孔單粒充種、雙粒充種、3粒充種和未充種,通過圖像處理技術,可以準確地判斷排種情況,過程如圖18所示。
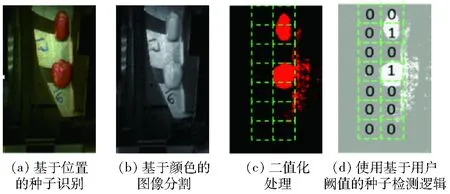
圖18 高速攝像和圖像處理的過程Fig.18 Process of high-speed camera shooting and image processing
相對于光電傳感器檢測技術檢測重播率誤差較大的局限性,高速攝像和圖像處理相結合的檢測技術可以更準確地檢測重播率,另外,還可以檢測種子的破碎率。但這種檢測技術也有一些局限性,其對軟件、硬件和環境的要求都很高,需要有高分辨率的攝像機、專業化的圖像處理軟件和均勻的照明環境,且需要對攝像機進行復雜的標定,以及后續的圖像處理操作,不僅成本較高,而且勞動強度較大。
光電傳感器檢測技術、高速攝像和圖像處理檢測技術各有優缺點。前者成本低,使用方便,應用更為廣泛;后者對檢測種子的顆粒尺寸沒有要求,且有更高的檢測精度,可應用于精密排種器的室內性能檢測。
3 平穩著床與測控技術
在精密排種技術和平穩投種技術的基礎上,為了確保排種和投種過程中實現的種距一致性,最終實現播種的均勻性,需要使種子平穩地著床。當前,種溝構建、外力壓種、播深控制等技術是種子平穩著床的關鍵技術,也是玉米播種領域的主要研究方向。
3.1 種溝構建技術
種溝構建技術是實現精密播種的關鍵[78],優質種床結構可分為3層,分別為種下土壤、種上土壤和土壤表層的土塊、殘茬等覆蓋物[79],如圖19所示,種下土壤應緊實,利于提熵,種上土壤應松碎緊密,利于空氣和熱量的流通,土壤表層的覆蓋物用于防止水分蒸發[80]。構建適宜的種床土壤結構,保證良好的種床性能,不僅可以為種子提供虛實相間的生長環境,有利于提高水分的利用率,還可以減少種子的觸土彈跳,提高種子的分布均勻性、播深一致性[27]。
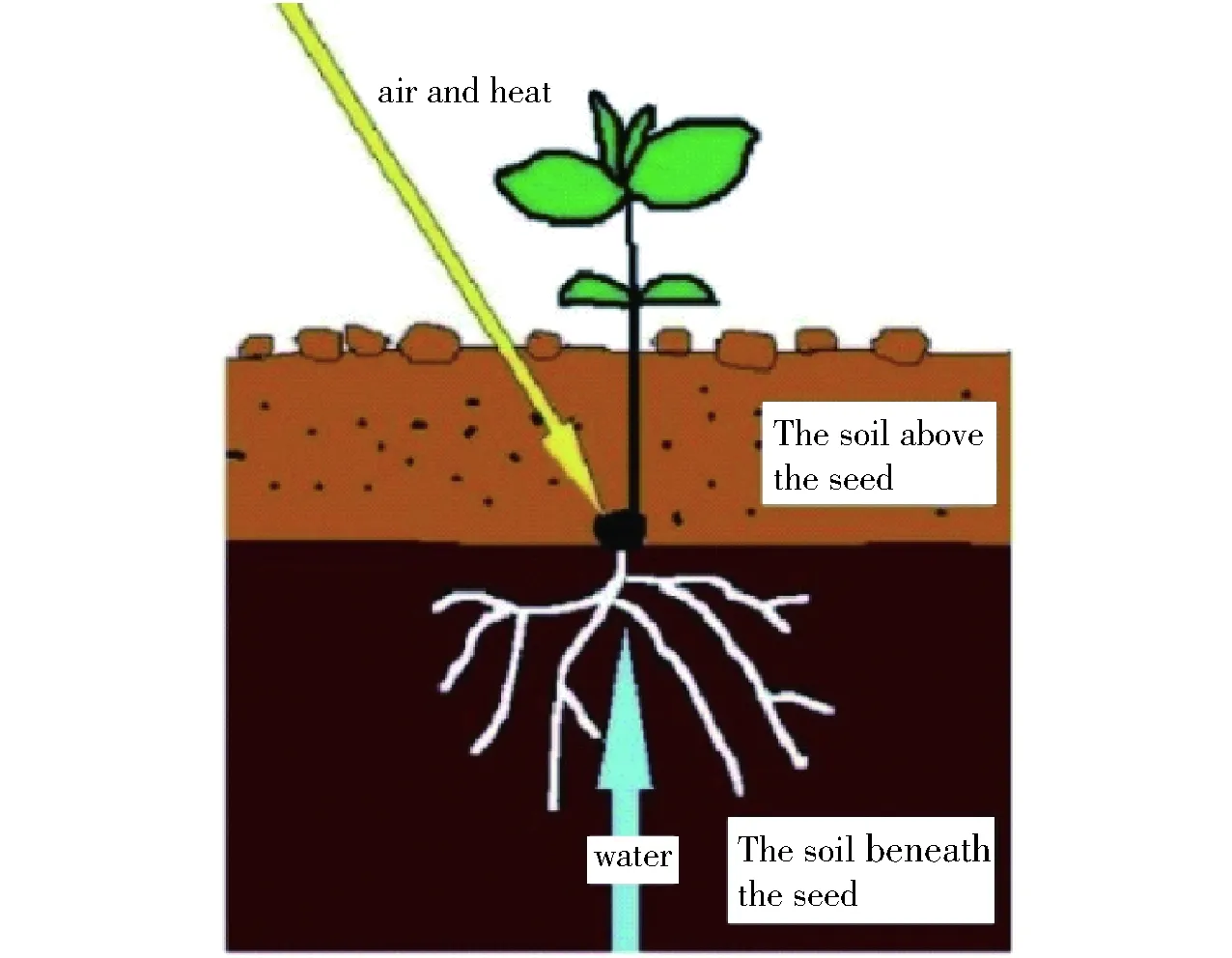
圖19 種床結構示意圖Fig.19 Schematic diagram of seed bed structure
開溝器是種溝構建的主要部件,其工作質量直接決定種溝的形狀,進而影響播種質量。開溝器有多種形式,按照入土角的不同,可以分為銳角和鈍角開溝器兩類,銳角開溝器的入土性能通常優于鈍角開溝器,銳角開溝器主要包括鋤鏟式和芯鏵式,鈍角開溝器主要包括滑刀式和圓盤式。不同類型的開溝器適用于不同的作業環境。由于圓盤式開溝器依靠周邊韌口滾動工作,因此適用于整地條件差的作業環境(如免耕作業環境),也能夠實現高速作業。由于芯鏵式、雙圓盤式、滑刀式開溝器在開溝時對土層擾動較小,可實現濕土覆種,因此,適用于干旱地區。一般而言,開溝時對土層擾動較小的開溝器,自覆土性能相對較差,需要專門的覆土部件進行覆土(如滑刀式);而自覆土性能較好的開溝器,一般會擾亂土層,使干濕土混合,不適用于干旱地區(如鋤鏟式)。相對而言,雙圓盤開溝器是一種適應性較好的開溝器,而滑刀式開溝器在非免耕條件下,播種質量較高。
近年來,學者們對開溝器進行了大量的研究,以提高入土與切土性能、減阻耐磨為目的,主要涉及開溝器的結構、表面材料、作業參數和作業環境等[81-87]。BUFTON等[88]研究了落種速度、落種角度及地表類型對種子在種溝內位移的影響:落種速度越低,位移越小;落種角度在75°~85°之間時,位移最小;與壓實表面相比,種子落在剪切表面上的位移較小;此外,尺寸較小的不規則形狀種子的位移小于尺寸較大的球狀種子。馬旭等[89]建立了種子著地速度、著地角度、開溝角度、播種深度和土壤濕度等影響因素與種子彈跳滾動位移的數學模型,為田間植株分布預測和計算機仿真研究奠定了基礎。為實現精密播種,開溝器需要滿足開溝阻力低、開溝質量好的要求,以利于平穩落種,提高種子分布的均勻性。然而,關于種溝質量的研究相對缺乏。不同的開溝器結構會形成不同的種溝形狀,會對種子觸土后的狀態產生不同影響。袁銳[90]研究了溝形對種子觸土后彈跳滾動的影響,對于V型開溝器,開溝角越小,種子的位移越小。寬度較窄、溝內平整的種溝,種子觸土后的彈跳滾動位移較小。賈洪雷等[91]設計了雙V形筑溝器,相對于圓盤式開溝器,開溝深度均勻,開出種溝較窄,溝形穩定,溝壁平滑,土壤緊實,有利于保證播種深度一致性、種子分布直線性。由以上研究可知,開溝器影響種床的質量,從而影響種子在種溝內的分布均勻性,然而通過文獻可知,開溝器對種床質量影響方面的研究較少。
作物生長需要一個上松下實的土壤耕層環境[92],主要通過種溝鎮壓和播后鎮壓來實現。文獻[27,93-94]的研究表明,種溝鎮壓可增加或保持種溝含水量,縮短出苗時間。目前,耕層環境往往忽略了種溝鎮壓,只進行播后鎮壓。BLANCO等[95]提出,當播深較深時,不能單純依靠增加鎮壓輪的配重實現種子帶所在耕層的土壤壓實,否則,表層土壤將被過分鎮壓。播種深度為0~200 mm時,作物正常生長的土壤堅實度臨界值為2~3 MPa,土壤堅實度超過此臨界值時,將會抑制作物根系生長[96-97]。播種機上采用種溝鎮壓裝置可保證種下土壤的堅實度,其原理是在開溝器之后安裝種溝鎮壓裝置,對初始種溝進行造型和鎮壓,提高種溝質量的同時,可提高種溝土壤的堅實度,減少種子在種溝內的彈跳,保持和增加土壤的含水率。如圖20所示,意大利Maschio公司播種機種溝鎮壓裝置安裝在圓盤開溝器后,可以對種溝進行造型和鎮壓,減少種子觸土后的位移,提高種子分布的一致性[98]。

圖20 Maschio種溝鎮壓裝置Fig.20 Maschio’s suppression device of seed groove
3.2 外力壓種技術
種子落入種溝時,會發生觸土彈跳或滾動,通過采用壓種裝置對落種及時地進行按壓,可以有效地減少種子的彈跳或滾動,提高種子的分布均勻性。因此,精密播種機上通常裝有壓種裝置。
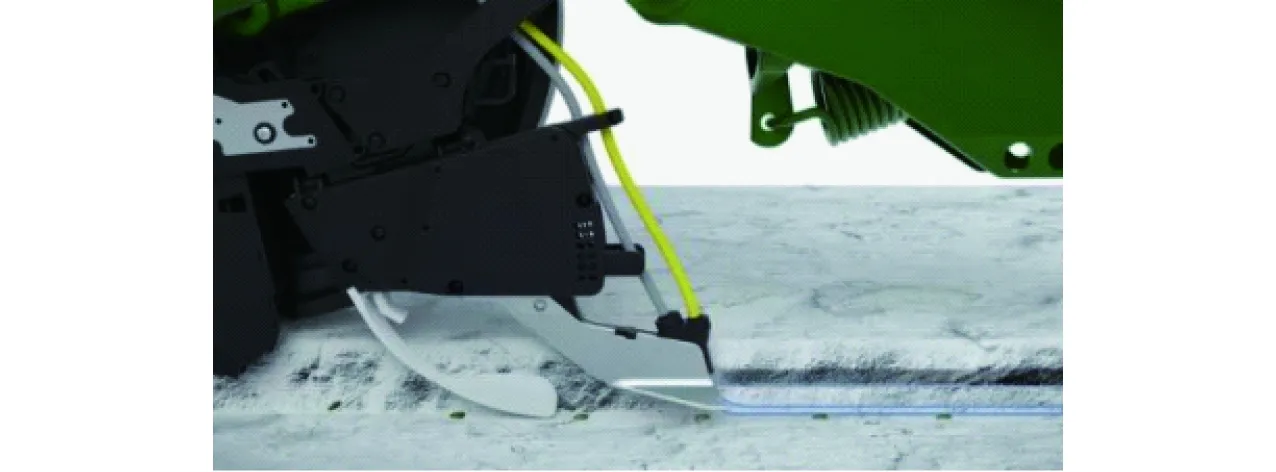
圖21 Precision Planting壓種舌Fig.21 Seed-pressing tongue of Precision Planting
壓種裝置主要有壓種舌和壓種輪兩種形式。圖21為Precision Planing公司的壓種舌,直接安裝在SpeedTube投種裝置的底部,可以防止落種的彈跳[99]。
德國Horsch公司采用比較柔軟的橡膠滾筒作為壓種裝置,直接安裝在導種管的后面,當種子離開導種管后立即固定種子,防止種子的滾動和跳動[100],如圖22所示。

圖22 Horsch壓種輪Fig.22 Seed-pressing wheel of Horsch
3.3 播深測控技術
播種深度影響出苗時間和出苗率,適宜的播種深度,種子可獲得較好的水分條件和養分條件。H?KANSSON等[101]通過大麥出苗試驗得出,隨著播種深度的增加,出苗時間線性增長。對于不同的土壤情況,適宜的播種深度范圍有所不同。播種深度一致,可以保證種子同時出苗,減小大小苗現象導致的植株間的競爭。當播深過淺時,會導致種子成長初期缺水,也可能被禽類所捕食[102];播深過深時,在出苗之前,種子內的營養成分已消耗殆盡。KARAYEL等[103]研究了播種深度對出苗率的影響,得到了播種深度一致時出苗率高的結論。
土壤的阻力、地表殘留會引起開溝器的振動,從而造成開溝深度的變動[104-105],KARAYEL等[106]的研究表明,即使在實驗室條件下,開溝深度也會發生變化。因此,為保證適宜的播種深度,需要對播種單體的播種深度進行控制。針對傳統播種機,播種單體通過平行四桿機構及安裝在開溝器后面的鎮壓輪或限深輪,實現對地面的仿形,并且在平行四桿機構上安裝機械彈簧,減少播種單體的振動,保持一致的播種深度[107]。該方式是在作業前調整好彈簧的壓緊力,同時調整好限深輪和開溝器的相對高差,通過試播一段距離來檢查作業質量,達到合格率后開始正式作業,整個作業過程中不再調節播種深度,這無法適應地表土壤條件多變的情況。
對于通過三點懸掛機構安裝在拖拉機上的機具,早期是通過調節拖拉機三點懸掛機構的角度來調節作業深度。LEE等[108]設計了耕作深度控制系統,主要由設置單元、檢測單元、控制單元、液壓單元以及三點懸掛和機具單元組成。檢測單元采用光學傳感器測量傳感器和地表之間的距離,傾斜角傳感器測量拖拉機的俯仰角,提升臂傳感器測量提升臂的位置,通過3個傳感器采集的信號計算耕作機具的耕作深度,作為控制單元的輸入信號,與設置單元傳遞給控制單元的信號進行對比,得到偏差信號,控制電磁閥的開閉,從而控制液壓缸的運動,間接地控制拖拉機的三點懸掛裝置,調節安裝在三點懸掛裝置上的耕作機具的作業深度,通過實驗獲得了系統的響應特性。MOUAZEN等[109]和SAEYS等[110]為了在線檢測土壤同一深度的堅實度,把土壤堅實度測量儀通過三點懸掛安裝在拖拉機上,分別研發了測量機架相對地表高度的傳感器和用于作業深度控制的模型。測量儀的機架相對地表的高度變化信號通過wheel-LVDT傳感器獲得;作業深度控制模型基于電液控制技術而建立,主要通過調節拖拉機三點懸掛機構的角度,來保持堅實度測量儀在地表下的作業深度不變。
對于機具作業深度的測控方法,學者們進行了大量研究。VAN DER LINDEN等[111]研發了紅外激光三角測量傳感器,實時地測量行間機械鋤草器的作業深度,結果表明該深度傳感器不受太陽光的影響,可以有效識別土壤和作物,此外,針對運動中的機具,測量精度可以達到5 mm。NIELSEN等[112]設計了播種機開溝深度的測量系統和電液控制系統,采用角度傳感器測量開溝器的角度,通過計算得到開溝深度,與設定的開溝深度對比,獲得偏差信號,作為控制系統的輸入信號,通過室內試驗比較了深度控制系統的3種控制算法:三點位置控制、P控制、PID控制,發現三點位置控制的響應最快,而PID 控制最穩定,也最準確。NIELSEN等[113]研發的播深測量系統,主要由線性位移傳感器和超聲波傳感器組成,分別用于測量開溝器相對機架的位置變化和機架與地表的高度變化,在控制器中將兩個傳感器獲得的信號進行聯立,可以得到實際的開溝深度。NIELSEN等[114]在田間試驗中,控制系統采用三點位置控制算法,與未采用控制系統的情況相比,播種深度變異性由±8 mm減小為±2 mm。
目前,在播種機上,一般采用單體仿形技術實現更精確的仿形,從而提高播種深度的一致性,一般也基于播種單體進行播種深度的測量和控制。SHARIPOV等[115]在同一個絕對地理參照坐標系下,測量了播種深度以及機具的垂直和剖面沖擊力,研究了播種深度的變動和開溝器受力之間的關系,得到引起播種深度大幅度變動的垂直沖擊力和剖面沖擊力的頻率和波長。在此基礎上,SHARIPOV等[116]建立了開溝器豎直方向運動的數學模型,這一模型包括開溝器裝配體、作為被動控制系統的鎮壓輪、半主動電磁流變阻尼系統。針對半主動電磁流變阻尼系統,對3種假設模型(Bingham,Dahl和Bounc-Wen模型)進行了對比仿真試驗,從減小機具豎直位移和作用力的角度來看,半主動控制系統要優于被動控制系統,并且Bounc-Wen模型的性能最優。蔡國華等[117]和WEN等[118]采用超聲波傳感器實時檢測開溝深度,并設計了控制系統,通過液壓系統來調節開溝深度。趙金輝等[119]設計了播種機開溝深度控制系統,采用兩個位移傳感器獲取實時的開溝深度,與設定開溝深度的偏差超過設定范圍時,通過液壓系統調節四連桿仿形機構,進而調節開溝深度,使其滿足要求,控制系統響應時間為0.12 s,測量的開溝深度穩定性系數大于90%。黃東巖等[120]設計了一種主動作用式播種深度自動控制系統,采用PVDF壓電薄膜傳感器測量播種機限深輪的胎面形變量,根據胎面形變量實時監測播種單體對地表的壓力,通過安裝在四連桿間的空氣彈簧調節播種單體對地表的壓力,通過控制播種單體對地表的壓力來控制播種深度。李玉環等[121]設計了玉米播種深度控制系統,選用壓力傳感器測量鎮壓輪的壓力,當超出預設閾值范圍時,通過電動推桿驅動覆土器運動,調節覆土量,從而調節播種深度,播深合格率高于90%。JIA等[122]設計了一款自適應性耕作深度監控系統,采用地表適應性擺臂和光學編碼器測量擺臂的旋轉,測得的角度通過公式可以轉換為耕作深度,通過田間試驗,得到該系統在規則地表的測量誤差為11.3 mm。SUOMI等[123]在條播機上安裝了8個傳感器,用于測量開溝器的作業深度,并將此信號作為控制系統的輸入信號,在串聯的控制系統中采用PID控制算法調節液壓開溝器的壓力,采用ISO 11783協議進行通信。WEATHERLY等[124]研制了一款主動式播種深度控制系統,該系統利用干燥面傳感器檢測土壤電阻以得到土壤水分信息,再通過控制器、液壓系統、調節機構等將圓盤開溝器調整至合適位置,從而把種子播在土壤中含水率較適宜的位置。
當前,在國外先進的農機企業中,在播種機上安裝播深測控裝置較為廣泛。德國Horsch公司、Knize公司、意大利Maschio公司、美國Precision Planting公司等均采用液壓或氣壓裝置對開溝器的作業深度進行控制,尤其是美國Precision Planting公司研發的氣力式下壓裝置,設置了兩個氣囊,分別用于提起和下壓開溝器,通過自動增加或減小壓力來實現。如圖23所示,是不同的典型播種深度調節裝置[98, 125-127]。

圖23 播深調節裝置Fig.23 Seed depth adjusting device
德國Horsch公司通過在播種單體上安裝力傳感器實時獲取播種單體對地表的壓力,并采用液壓裝置改變播種單體的下壓力,達到調節播種深度的目的(圖24a)。美國Agleader公司研發了下壓力測控系統,其針對播種單體受地面障礙物影響而發生彈跳的情況,設計了蓄能裝置,保證播種單體運動的穩定性,系統響應時間僅為1 s,借助于該系統能夠快速、準確地實現播種深度的一致性(圖24b)。
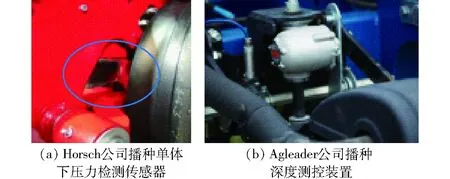
圖24 播深測控裝置Fig.24 Seed depth measurement and control device
總之,播深測控技術的研究目標是實現作業深度的一致性,基本原理主要是通過實時地測量開溝器的作業深度,并與設定的理論作業深度對比,偏差超過設定范圍時,啟動控制系統進行調節,具體是通過電磁閥的開閉,調節液壓或氣壓裝置的壓力,由于開溝器與氣壓或液壓裝置連接,從而開溝器的作業深度可調,直至達到設定的理論深度,最終實現播深的一致性。
4 討論和建議
近年來,玉米播種技術經歷了快速的發展,在機械化的基礎上開始逐步趨于智能化,玉米播種質量大大提升。然而,從國內外的發展現狀來看,尚存在以下問題,在以后的研究中需要重點關注和解決:
(1)玉米排種器的驅動問題
目前,在國外知名農機企業中,地輪驅動、電動機驅動、液壓馬達驅動等多種驅動方式均有應用,可以滿足用戶的不同需求。采用電驅、液壓馬達等新型排種驅動技術,極大地提高了播種的速度和精度。然而,在國內農機企業中,地輪驅動仍然是主要甚至唯一的排種器驅動方式,電驅排種技術主要處于實驗室階段,而關于液壓馬達驅動排種的研究和應用則更少,國內播種機的驅動方式限制了播種速度和精度的提升。建議在未來的研究中,加強對電驅和液壓馬達驅動排種技術的研究和應用,為我國播種機速度和精度的提升提供技術保障。
(2)玉米變量播種處方圖的獲取問題
變量播種處方圖的獲取在國內外都是難點。一方面,受到土壤傳感器技術水平的限制,在線檢測土壤特性的技術還不成熟,而傳統的土壤采樣法成本高、數據量少,無法為變量播種提供足夠的數據支撐。另一方面,影響玉米產量的因素眾多,包括土壤特性、肥料和農藥的施用量、氣候因素等,在眾多因素交互作用下,探索獲得高產高收益的適宜播種量,需要開展長期的、大范圍的試驗,也具有很大難度。目前,變量播種處方圖主要基于產量圖和土壤養分圖生成,考慮的因素尚不充分,國內外尚無變量播種成功實踐的相關報道,因此,變量播種技術的價值仍然需要未來實踐的驗證,其發展也依賴于各方面技術的進步。
(3)平穩投種技術在國內的研究及應用問題
目前,國外發達國家已經研發成功了先進的帶式和氣力式投種系統,提升了高速作業(可達20 km/h)時的種距一致性。然而,國內播種機播種速度為6~8 km/h,目前仍主要依靠導種管進行投種,速度和精度都有待提升。因此,國內應加快平穩投種技術的研究及應用,從而為播種機速度和精度的提升奠定基礎。
(4)播深測控技術的研究及應用問題
目前,國外發達國家已經研發成功了針對播深的測控設備,可以實時地通過壓力傳感器及液壓、氣壓系統測量并調節播種深度,在播種機上已有大量應用。國內播種機主要依靠機械彈簧和平行四桿機構進行被動的仿形,播種深度的精度及一致性有待提高。因此,國內應加強播深測控技術的研究和應用。
(5)播種測控技術的應用推廣問題
目前,國外播種機的智能化水平遠高于我國,一般在播種機上安裝各類傳感器用于在線監測播種機的性能,機手通過駕駛室內的智能終端可以觀察播種機的實時作業狀態,包括播種量、株距合格指數、下壓力等,在一定程度上,智能化技術既解放了人力,也大大提升了播種精度,減少了故障率。然而,盡管國內在智能化測控技術方面取得了很多成果,包括播量監測、漏播監測等技術,但目前國內市場上,應用相關成果的播種機少之又少,其主要原因在于安裝測控設備的成本較高。因此,在研究層面上,不僅要提高測控設備的精度,也要盡量降低測控設備的成本,在政府層面上,應該加強對測控設備的政策補貼力度,促進技術的推廣應用。
5 展望
現代化農業背景下,高速、高精度、智能化成為玉米播種機的發展方向,同時,精準農業對播種機提出了變量作業的新要求。目前,在播種機的速度、精度、智能化程度等方面,國內與國外均存在一定差距。然而,由于國內外的地形、種植習慣、經濟發展水平等有差異,需要結合國內的實際情況,因地制宜地開展玉米播種與測控技術的研究。基于現有技術以及未來發展的方向,我國玉米播種與測控技術將主要朝以下方向發展:
(1)從排種器驅動方式上看,今后將向多種驅動方式并存的方向發展。目前,對于電驅排種技術,國內已經開展了大量的研究工作,具有了一定的技術積累,而關于液壓馬達驅動排種的研究相對較少。因此,未來國內將向電驅排種技術為主、地輪驅動和液壓馬達驅動等驅動方式為輔,多種驅動并存的方向發展。
(2)在精準農業背景下,播種機會朝著變量播種的方向發展。目前,變量播種主要指的是基于小區特性的變密度播種,未來可能會涉及到基于小區特性的變深度播種。國外,有少部分地區開始嘗試基于小區特性的變深度播種,但尚未發現相關報道。
(3)從投種技術上看,今后將向多種投種技術并存的方向發展。帶式投種方式和氣力式投射方式滿足高速作業的要求,未來會成為國內主要的投種方式。
(4)智能化技術將成為玉米播種技術中研究的熱點。智能化技術包括各類傳感器技術、控制技術等,智能化測控設備不僅有助于提高玉米播種的精度和速度,減少故障率,還極大地解放了人力。
隨著研究的深入,對播種技術的研究將更加全面和充分,排種驅動技術、投種技術、種溝構建技術、外力壓種技術、播深控制技術和智能化測控技術等都將被深入研究。在玉米播種過程中,排種、投種、著床3個環節相互關聯,均影響播種性能,研究中應采用系統工程的思想,對各環節統籌考慮。此外,農機與農藝深度融合是提升我國玉米播種水平的關鍵。
猜你喜歡
中學生數理化·七年級數學人教版(2022年6期)2022-06-05 06:50:50
快樂學習報·教育周刊(2022年16期)2022-05-01 21:25:05
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年6期)2019-01-08 02:43:04
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
新聞傳播(2016年10期)2016-09-26 12:14:59
新聞傳播(2015年10期)2015-07-18 11:05:40
交通建設與管理(2015年15期)2015-03-20 15:18:57