基于五桿機構的丹參膜上移栽機構設計與試驗
2018-09-17 06:49:22徐高偉劉宏新薦世春何騰飛
農業機械學報 2018年9期
徐高偉 劉宏新 薦世春 史 嵩 何騰飛
(1.東北農業大學工程學院, 哈爾濱 150030; 2.山東省農業機械科學研究院, 濟南 250100)
0 引言
丹參是我國常用大宗藥材之一,年需求量5.2萬t且用量逐年增加[1-2]。在丹參種植過程中,移栽是其重要環節,丹參種植的勞動力成本占丹參種植總成本50%以上[3]。山東省丹參種植方式以山東省農業主推技術“丹參大壟雙行覆膜高效生產技術”為基礎,采用大壟膜上移栽的栽培模式,要求丹參種苗與壟面線的夾角不低于80°,以增加丹參扎根深度,提高丹參產量[4]。然而,由于丹參移栽機械化配套工作起步較晚,針對上述種植模式的丹參移栽幾乎全部由人工完成,不僅勞動強度大,生產效率和質量低,而且立苗率難以保證[5-7]。
目前,市面上膜上移栽機構主要以移栽蔬菜[8]、煙草[9]等作物的缽苗移栽為主,而丹參育苗方式采用傳統的作畦越冬育苗,移栽方式為裸苗移栽,沒有缽體支撐,移栽后在穴中姿態不確定,極易倒伏;另外,丹參種苗長度約為200 mm,根莖長度約為150 mm,質量較輕,根莖細長。由于丹參種苗的植株形態與蔬菜、煙草缽苗相差較大,蔬菜、煙草等膜上移栽機構的鴨嘴栽植器與丹參種苗的匹配程度較低,降低了丹參移栽質量[10];丹參種苗移栽深度為150 mm,遠超過蔬菜、煙草等作物,現有膜上移栽機的軌跡升程無法滿足丹參移栽。而以丹參裸苗以及丹參栽培模式為移栽對象和農藝要求的丹參專用移栽機和移栽機構尚未見相關報道。
針對以上情況,本文結合“丹參大壟雙行覆膜高效生產技術”提出的農藝要求,同時針對丹參種苗裸苗機械化移栽的立苗率問題設計一種五桿式丹參移栽機構,實現丹參移栽的農藝要求,提高鴨嘴栽植器與丹參種苗的匹配程度,保證丹參裸苗移栽的大升程軌跡、作業質量和立苗率要求,同時為五桿機構在特定約束條件下的參數優選探索有效的方法。
1 栽植器端點運動軌跡分析與機構選擇
1.1 栽植器端點運動軌跡分析
為保證丹參種苗裸苗機械化移栽的立苗率,根據陳建能等[11]提出的保證立苗率的新思路,以鴨嘴栽植器為末端執行器的膜上移栽機構在移栽丹參種苗時,丹參種苗落入穴中時應保持與壟面的垂直狀態。
為確保上述垂直狀態,鴨嘴栽植器在退穴過程中應盡量與壟面垂直,在鴨嘴栽植器退穴后,丹參種苗與其完全脫離之前沿移栽機構作業速度前進方向略微傾斜,根據丹參種苗與壟面線不低于80°的立苗率要求,傾斜角度不超過10°,即這一過程中鴨嘴栽植器與壟面線夾角不低于80°,以防止丹參種苗被栽植器推倒。這樣在后續的覆土和鎮壓作用下,丹參種苗就會靠到沿移栽機前進方向一側的穴口壁面,以保證立苗率。
相對和絕對運動軌跡如圖1所示,絕對軌跡由鴨嘴栽植器端點相對機架的相對運動軌跡與機具水平方向運動軌跡合成。丹參種苗移栽深度為150 mm,株距為200 mm,為滿足丹參移栽的農藝要求同時保證立苗率和升程要求,其絕對軌跡應滿足:①絕對運動軌跡最低點與壟面線的垂直距離h1,即移栽深度為150 mm。②鴨嘴栽植器在回程過程中端點軌跡與壟面線的夾角β1盡量接近90°。③單個運動周期內絕對運動軌跡與壟面線的交點距離l,即入土、出土軌跡與壟面線的交點距離越小越好。④由于丹參植株在壟面線上露出的長度為50 mm,出土軌跡從壟面線至豎直向上50 mm之間的軌跡與壟面線所呈夾角α1不低于80°。⑤絕對軌跡升程h不低于300 mm。
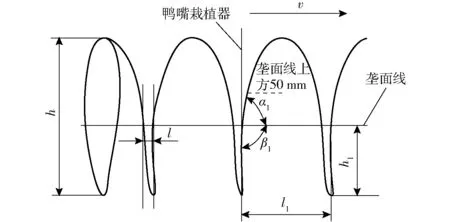
圖1 鴨嘴栽植器端點軌跡分析Fig.1 End point trajectory analysis of duckbill planting apparatus
1.2 機構選擇
五桿機構是具有多自由度最簡單的閉環機構,機構相對穩定,具有較多的尺寸和角度參數、不同的驅動方式及傳動比,可實現豐富的曲線軌跡,因此采用五桿機構作為栽植器端點軌跡的形成機構[12]。
對于五桿機構參數的求解,當前主要采用解析法與軟件相結合的方法。馬良等[13]由ADAMS軟件建立參數化模型,尋求連架桿輸出軌跡的改變規律;方芳[14]借助于計算機輔助設計的方法,研制了齒輪五桿機構的軌跡曲線生成系統;陶軍等[15]經過仿真和試驗驗證了圖解法與解析法相結合是確定齒輪五桿機構實現預定軌跡的有效方法;何小晶等[16]對五桿式移栽機構建立了運動學模型,并進行了參數分析。
以上研究皆從單一機構角度對五桿機構進行理論研究,未考慮機構應用時所處的實際工況環境以及五桿機構自由運動的約束條件。而本文所面對的工程實際問題中,在丹參移栽機構軌跡的大升程要求、移栽機構的空間約束條件以及五桿機構自由運動的基本約束條件下,如何得到滿足丹參移栽農藝要求的機構參數組合是需要解決的首要問題。在建立約束條件和運動學模型的基礎上,結合Matlab建立的輔助界面對機構進行運動學分析、軌跡繪制,尋求區域軌跡特性,并研究關鍵參數對軌跡的影響規律,根據機構軌跡的要求優選機構參數,以滿足丹參移栽的農藝和大升程要求。
2 工作原理與模型建立
2.1 工作原理
五桿式丹參移栽機構示意圖如圖2所示,為便于機構的實際應用,設置雙曲柄的傳動比為1,即本文主要針對等速雙曲柄五桿機構進行研究。曲柄OD與AB為原動件,以相同轉速同向轉動,進而帶動連桿BL和DE擺動,栽植器FG與連桿DE以一定角度固連并在DE帶動下進行移栽。
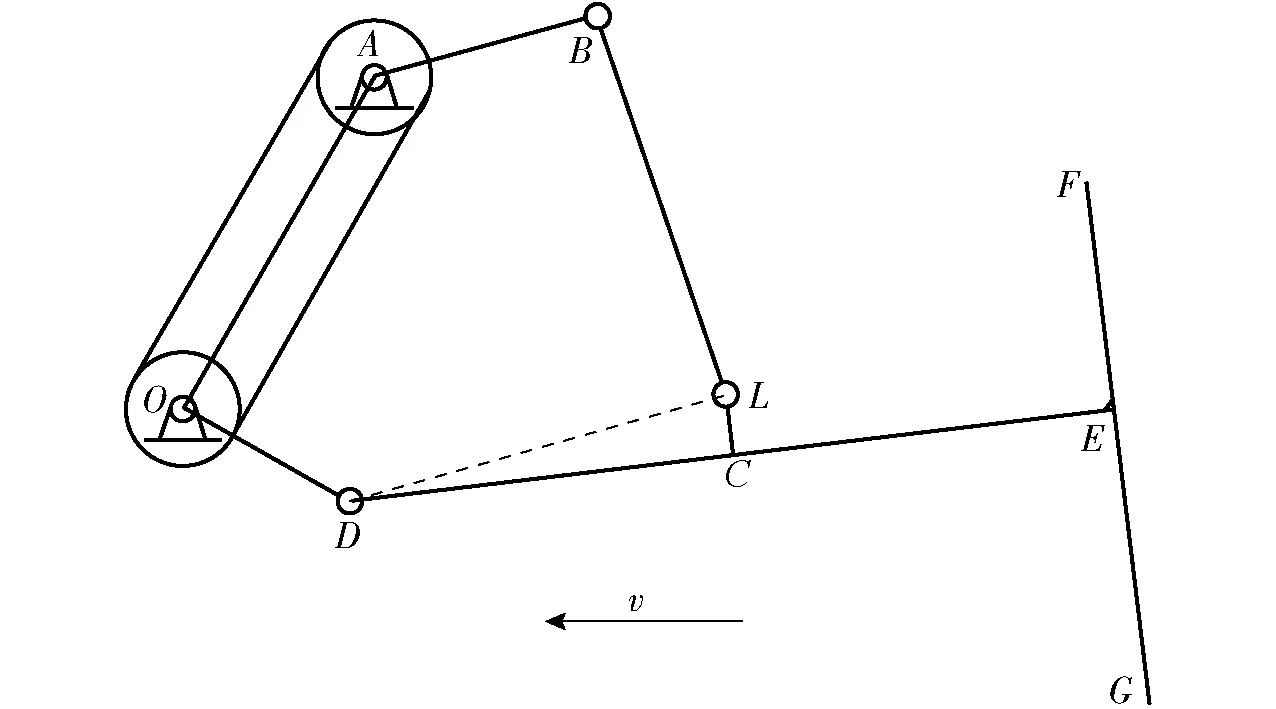
圖2 五桿式丹參移栽機構示意圖Fig.2 Schematic diagram of five-bar transplanting mechanism of Salvia miltiorrhiza
2.2 數學模型建立
以O點為坐標原點,水平方向為x軸、豎直方向為y軸建立直角坐標系,如圖3所示。
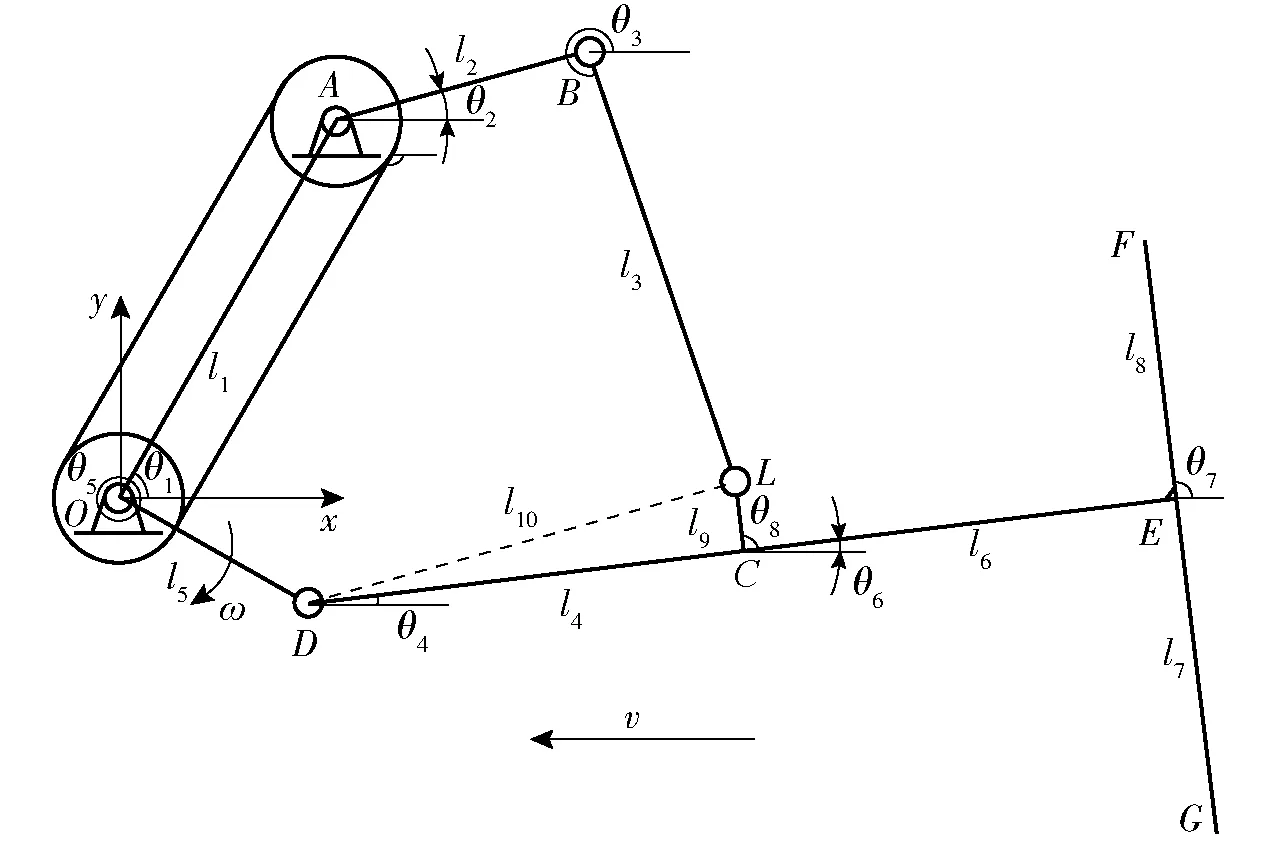
圖3 五桿式丹參移栽機構數學模型Fig.3 Mathematical model of five-bar transplanting mechanism of Salvia miltiorrhiza
2.2.1運動學模型
D點的位移方程為
(1)
B點的位移方程為
(2)
根據矢量方程lOA+lAB+lBL=lOD+lDL可得L點的位移方程為
(3)
令
(4)

(5)
將θ3代入式(3)可求出θ4。
C點的位移方程為
(6)
E點的位移方程為
(7)
F點的位移方程為
(8)
G點的位移方程為
(9)
對式(9)求一階導數和二階導數,即可得鴨嘴栽植器底端點G的速度和加速度方程[16]。
2.2.2空間約束條件
為保證機構在整機安裝及作業時與其他機構不發生干涉、碰撞,將機構布置為空間結構,其空間限制如圖4所示。
(1)機架高度H1:為保證作業時丹參種苗順利落入鴨嘴栽植器,要求機構所能達到的最高位置C′小于機架的高度,由圖4可知,機架高度需滿足
H1=H+l2+l1sinθ1+δ
(10)
式中δ——機構最高點位置距離機架的高度,mm
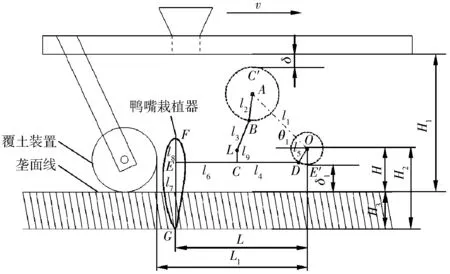
圖4 五桿式丹參移栽機構空間限制邊界條件Fig.4 Boundary conditions of five-bar transplanting mechanism of Salvia miltiorrhiza
(2)O點距離壟面線的高度H:為保證機具具有良好的通過性,要求H大于l5與E′距壟面線距離之和,即
H>l5+δ1
(11)
式中δ1——E′距離壟面線距離,mm
(3)移栽深度H3取值為150 mm。
(4)F點相對軌跡可行域的長度與高度L1、H2:本文設定L1為600 mm;H2為O點到移栽最深處的距離
H2=H+H3
(12)
(5)栽植器端點G與O點的初始水平距離L:在移栽過程中,要求該值在一定范圍內越小越好。在l2、l5不變的情況下,可通過調節l3、l4和l9減小L。
根據市場上一般移栽機機架的高度[17],設定H1=720 mm,而移栽機構最下端E′與壟面線的距離應大于E點與壟面線的距離,取δ1>l7-H3,0<δ<10 mm,經分析可得
(13)
本文設定移栽機構機架初始長度l1和安裝角度為290 mm和45°,根據機構軌跡升程不低于300 mm的要求,得到兩曲柄以及初始安裝角度的取值范圍
(14)
2.2.3基本約束條件
設計的五桿機構屬于雙曲柄型,雙曲柄均為勻速轉速,為使機構形成完整封閉的運動軌跡,五桿機構各尺寸參數需要滿足雙曲柄存在的必要條件,必要條件是指兩原動件按一定運動規律作整周運動時,五桿機構在每一時刻都滿足裝配條件[18-23]。
(1)五桿機構裝配條件
五桿式丹參移栽機構數學模型見圖3,其裝配條件可表示為
(15)
式中lBDmax、lBDmin——鉸接點B與D距離的最大值和最小值
令x=max(l3,l10),y=min(l3,l10),則有
(16)
化簡可確定l3、l10取值范圍為
(17)
(2)雙曲柄存在必要條件
由運動學模型可得機構B點和D點坐標,曲柄AB和OD以相同角速度ω轉動時,BD之間的距離lBD的幾何關系為

(18)

(19)
式(19)是對時間t的非線性方程,借助Matlab搜索極值可能出現的范圍,再利用fmin函數求出lBD的極值lBDmax和lBDmin。將lBDmax和lBDmin代入式(15)可得到l3和l10范圍。
根據機構空間約束條件,初定l1=290 mm、l2=80 mm、l5=70 mm、θ1=45°、θ2=97°、θ5=118°,結合上述求解過程,得到l3和l10的取值范圍
(20)
初定五桿式丹參移栽機構參數值為:l1=290 mm、l2=70 mm、l3=120 mm、l4=220 mm、l5=60 mm、l6=229 mm、l7=243 mm、l8=100 mm、l9=45 mm、θ1=45°、θ2=97°、θ5=118°、θ7=90°、θ8=90°。
2.3 人機交互可視化輔助界面
在上述建立的數學模型基礎上,運用Matlab編寫五桿式丹參移栽機構人機交互可視化輔助界面(軟件著作權登記號:2017SR663379),如圖5所示。
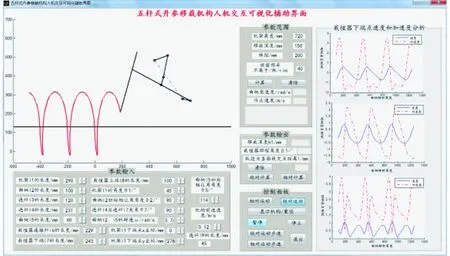
圖5 五桿式丹參移栽機構人機交互可視化輔助界面Fig.5 Human-computer visual interface of five-bar transplanting mechanism of Salvia miltiorrhiza
該界面包括圖像顯示區、參數范圍確定區、參數輸入區、控制面板區、速度和加速度分析區以及結果輸出區。通過該界面可先確定機構參數的基本取值范圍,根據參數取值范圍調整各參數,在圖像顯示區中進行直觀定性的識別判斷,在結果輸出區定量比較分析,對設計參數進行調整得到符合丹參移栽農藝要求的軌跡。
3 軌跡區域分布特性與變化規律分析
3.1 軌跡區域定位
通過輔助界面模擬仿真發現,在其他參數不變的前提下,當DE與FG的夾角θ7取值不同時,軌跡的形狀、大小及位置都會發生改變,圖6為θ7在[0°,180°]內變化的各位置軌跡特性。區域1為θ7在[0°,80°)的各位置軌跡特性;區域2為θ7在[80°,100°]的各位置軌跡特性;區域3為θ7在(100°,180°]的各位置軌跡特性。

圖6 區域軌跡特性Fig.6 Regional trajectory characteristics
根據軌跡長軸與水平方向的夾角,將軌跡分為3個區域。區域軌跡的變化規律為,θ7從0°到180°軌跡先向左側傾斜然后再向右側傾斜;長短軸比值逐漸變小;軌跡下端點在豎直方向上的區域范圍變化呈一開口向上的拋物線。以區域2中軌跡為基準進行分析,區域1中軌跡向左側傾斜,且長短軸比值較大,另結合實際移栽位置,區域1中的軌跡區域不符合要求;區域2中軌跡長軸方向與水平方向近似垂直,在θ7取90°時垂直度最好,軌跡區域下端點在豎直方向達到最大且長短軸比值較大但低于區域1;區域3中軌跡向右傾斜,軌跡區域向上方移動,長短軸比值逐漸縮小。
為滿足丹參移栽的可行域要求,選擇區域2中的軌跡特性作為目標。而對應θ7取值需結合后續軌跡分析進行判斷和驗證。
3.2 栽植器端點軌跡的變化規律分析
運用人機交互可視化輔助界面,通過改變五桿機構的關鍵參數得到相應的栽植器端點軌跡,根據輔助界面輸出的軌跡參數結果,分析關鍵參數對相對和絕對軌跡的影響。
3.2.1l2與端點軌跡之間的關系
在初定的五桿式丹參移栽機構各參數中保持其余參數不變,改變曲柄AB的長度l2,l2與栽植器端點軌跡之間的關系如圖7所示。
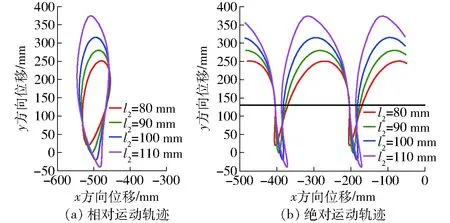
圖7 l2與栽植器端點軌跡之間的關系Fig.7 Relationship between l2 and endpoint of trajectory
由圖7可知,隨著l2逐漸增加,栽植器端點相對運動軌跡逐漸向左側傾斜,長短軸比值逐漸增大;絕對運動軌跡最低點與壟面線的垂直距離h1逐漸增大,鴨嘴栽植器在回程過程中端點絕對運動軌跡與壟面線的夾角β1逐漸減小;單個運動周期內絕對運動軌跡與壟面線的交點距離l逐漸減小;出土軌跡從壟面線至豎直向上50 mm之間的軌跡與壟面線所呈夾角α1逐漸增大。
3.2.2l5與端點軌跡之間的關系
在初定的五桿式丹參移栽機構各參數中保持其余參數不變,改變曲柄OD的長度l5,l5與栽植器端點軌跡之間的關系如圖8所示。
由圖8可知,隨著l5逐漸增加,栽植器端點相對運動軌跡逐漸向右側傾斜,長短軸比值逐漸減小;絕對運動軌跡最低點與壟面線的垂直距離h1逐漸減小,鴨嘴栽植器在回程過程中端點絕對運動軌跡與壟面線的夾角β1逐漸增大,單個運動周期內絕對運動軌跡與壟面線的交點距離l逐漸減小;出土軌跡從壟面線至豎直向上50 mm之間的軌跡與壟面線所呈夾角α1逐漸減小。
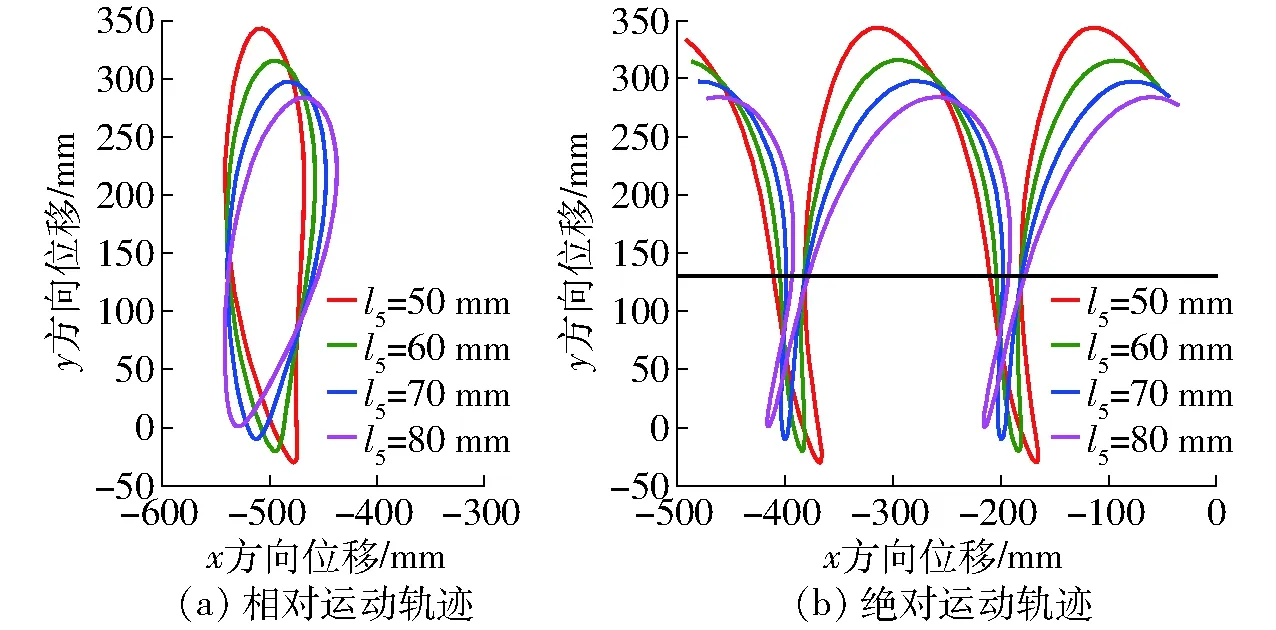
圖8 l5與栽植器端點軌跡之間的關系Fig.8 Relationship between l5 and endpoint of trajectory
3.2.3θ2與端點軌跡之間的關系
在初定的五桿式丹參移栽機構各參數中保持其余參數不變,改變曲柄AB的初始安裝角度θ2,θ2與栽植器端點軌跡之間的關系如圖9所示。
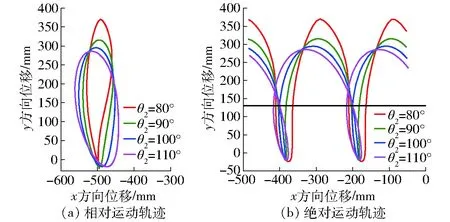
圖9 θ2與栽植器端點軌跡之間的關系Fig.9 Relationship between θ2 and endpoint of trajectory
由圖9可知,隨著θ2逐漸增加,栽植器端點相對運動軌跡逐漸向左側傾斜,長短軸比值逐漸減小;絕對運動軌跡中入土和出土軌跡發生交叉,變為繞扣型軌跡,絕對運動軌跡最低點與壟面線的垂直距離h1先減小后增大,但變化量較小;鴨嘴栽植器在回程過程中端點絕對運動軌跡與壟面線的夾角β1逐漸減小;單個運動周期內絕對運動軌跡與壟面線的交點距離l先減小后增大;出土軌跡從壟面線至豎直向上50 mm之間的軌跡與壟面線所呈夾角α1先減小后增大,但變化量較小。
3.2.4θ5與端點軌跡之間的關系
在初定的五桿式丹參移栽機構各參數中保持其余參數不變,改變曲柄OD的初始安裝角度θ5,θ5與栽植器端點軌跡之間的關系如圖10所示。
由圖10可知,隨著θ5逐漸增加,栽植器端點相對運動軌跡逐漸向右側傾斜,長短軸比值逐漸增大;絕對運動軌跡中入土和出土軌跡發生交叉,變為繞扣型軌跡,絕對運動軌跡最低點與壟面線的垂直距離h1先減小后增大,但變化量較小;鴨嘴栽植器在回程過程中端點絕對運動軌跡與壟面線的夾角β1逐漸增大;單個運動周期內絕對運動軌跡與壟面線的交點距離l先減小后增大;出土軌跡從壟面線至豎直向上50 mm之間的軌跡與壟面線所呈夾角α1先減小后增大。

圖10 θ5與栽植器端點軌跡之間的關系Fig.10 Relationship between θ5 and endpoint of trajectory
3.2.5l3與端點軌跡之間的關系
在初定的五桿式丹參移栽機構各參數中保持其余參數不變,改變連桿BL的長度l3,l3與栽植器端點軌跡之間的關系如圖11所示。
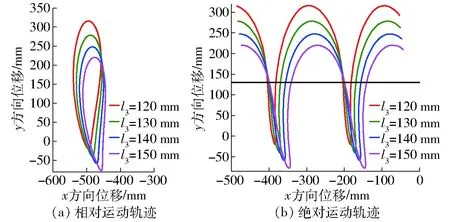
圖11 l3與栽植器端點軌跡之間的關系Fig.11 Relationship between l3 and endpoint of trajectory
由圖11可知,隨著l3逐漸增加,栽植器端點相對運動軌跡形狀、大小都不變,僅位置發生變化;絕對運動軌跡最低點與壟面線的垂直距離h1逐漸增大;鴨嘴栽植器在回程過程中端點絕對運動軌跡與壟面線的夾角β1基本不變;單個運動周期內絕對運動軌跡與壟面線的交點距離l逐漸增大;出土軌跡從壟面線至豎直向上50 mm之間的軌跡與壟面線所呈夾角α1逐漸減小。
3.2.6l10與端點軌跡之間的關系
在初定的五桿式丹參移栽機構各參數中保持其余參數不變,改變鉸接點D和L的距離l10,l10與栽植器端點軌跡之間的關系如圖12所示。
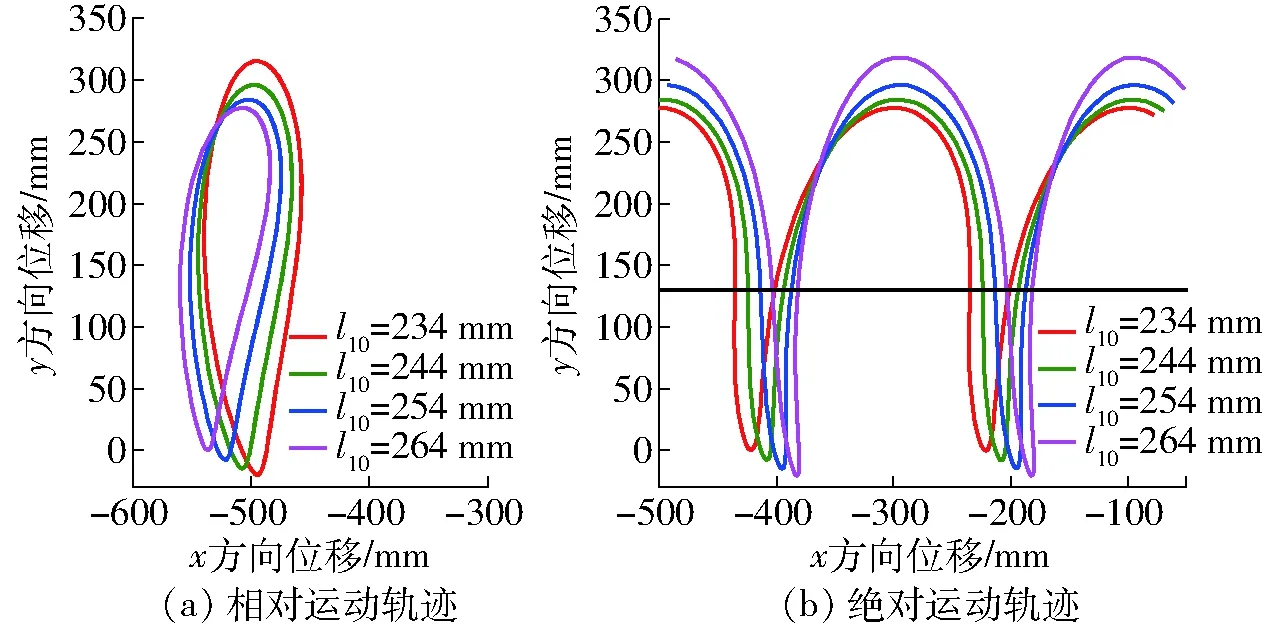
圖12 l10與栽植器端點軌跡之間的關系Fig.12 Relationship between l10 and endpoint of trajectory
由圖12可知,隨著l10逐漸增加,栽植器端點相對運動軌跡形狀不變,軌跡大小和位置發生變化;絕對運動軌跡最低點與壟面線的垂直距離h1逐漸減小;鴨嘴栽植器在回程過程中端點絕對運動軌跡與壟面線的夾角β1逐漸增大;單個運動周期內絕對運動軌跡與壟面線的交點距離l逐漸增大;出土軌跡從壟面線至豎直向上50 mm之間的軌跡與壟面線所呈夾角α1逐漸減小。
3.2.7θ1與端點軌跡之間的關系
在初定的五桿式丹參移栽機構各參數中保持其余參數不變,改變機架安裝角度θ1,θ1與栽植器端點軌跡之間的關系如圖13所示。
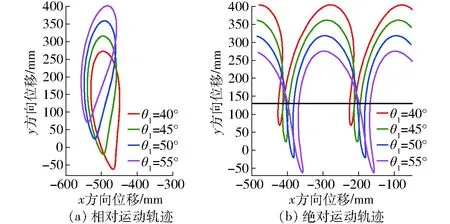
圖13 θ1與栽植器端點軌跡之間的關系Fig.13 Relationship between θ1 and endpoint of trajectory
由圖13可知,隨著θ1逐漸增加,栽植器端點相對運動軌跡形狀、大小都不變,僅位置發生變化;絕對運動軌跡最低點與壟面線的垂直距離h1逐漸減小;鴨嘴栽植器在回程過程中端點絕對運動軌跡與壟面線的夾角β1逐漸增大;單個運動周期內絕對運動軌跡與壟面線的交點距離l逐漸減小;出土軌跡從壟面線至豎直向上50 mm之間的軌跡與壟面線所呈夾角α1先增大后減小。
3.2.8θ7與端點軌跡之間的關系
在初定的五桿式丹參移栽機構各參數中保持其余參數不變,改變栽植器FG與連桿DE的夾角θ7,θ7與栽植器端點軌跡之間的關系如圖14所示。
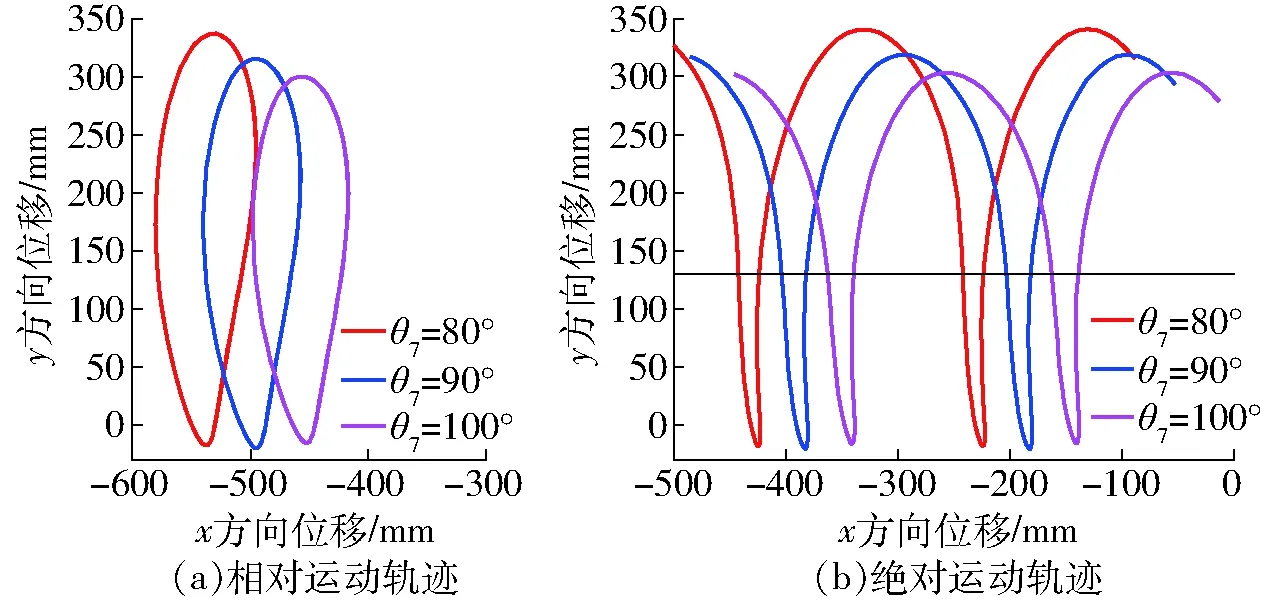
圖14 θ7與栽植器端點軌跡之間的關系Fig.14 Relationship between θ7 and endpoint of trajectory
由圖14可知,隨著θ7逐漸增加,栽植器端點相對運動軌跡形狀不變,位置和大小發生變化;絕對運動軌跡最低點與壟面線的垂直距離h1先增加后減小,90°時h1達到最大;鴨嘴栽植器在回程過程中端點絕對運動軌跡與壟面線的夾角β1基本不變;單個運動周期內絕對運動軌跡與壟面線的交點距離l逐漸增大;出土軌跡從壟面線至豎直向上50 mm之間的軌跡與壟面線所呈夾角α1逐漸減小。
3.3 數值循環比較優選
上述機構參數對栽植器端點絕對軌跡參數h1、β1、l、α1的影響見表2。
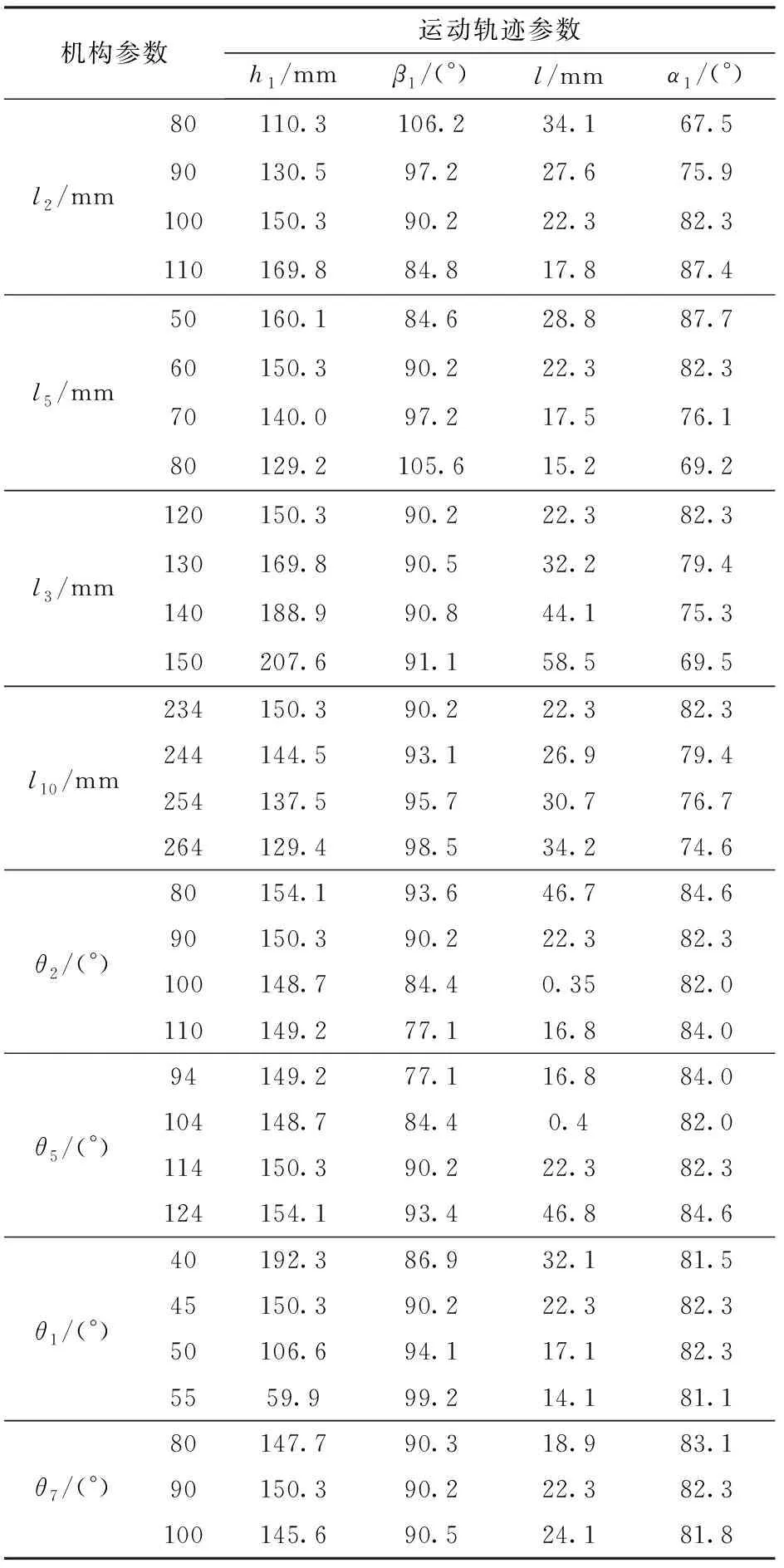
表2 l2、l5、θ2、θ5、l3、l10、θ1、θ7對栽植器端點絕對運動軌跡參數的影響Tab.2 Influence of l2, l5, θ2, θ5, l3, l10, θ1 and θ7 on absolute motion trajectory parameters of planting apparatus endpoint
條件約束及參數優選流程如圖15所示,圖中虛線框所示為數值循環比較進行參數優選的過程。優選的依據為:移栽深度h1最接近150 mm;鴨嘴栽植器在回程過程中端點絕對運動軌跡與壟面線的夾角β1最接近90°;出土軌跡從壟面線至豎直向上50 mm之間的軌跡與壟面線所呈夾角α1不低于80°,且越接近90°越好;入土、出土軌跡與壟面線的交點距離l越小越好。
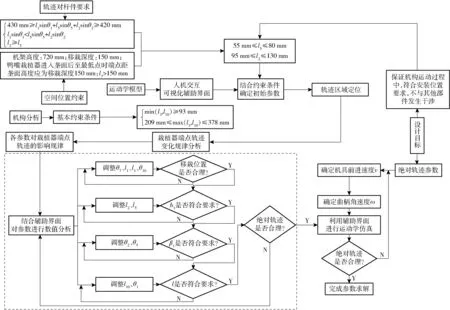
圖15 條件約束關系及參數優選流程Fig.15 Flow chart of conditions constraint and parameters solution
根據參數優選流程圖,最終優選出一組滿足丹參移栽農藝要求的五桿式移栽機構參數組合:l1=290 mm、l2=100 mm、l3=120 mm、l4=231 mm、l5=60 mm、l6=229 mm、l7=243 mm、l8=100 mm、l9=45 mm、θ1=45°、θ2=90°、θ5=114°、θ7=90°、θ8=90°,輔助界面輸出的相對和絕對運動軌跡如圖16所示,其對應的絕對軌跡參數為:h1為150.3 mm、β1為90.2°、l為22.3 mm、α1為82.3°、h為345.6 mm。

圖16 滿足丹參農藝要求的栽植器端點軌跡Fig.16 Endpoint trajectories of planting apparatus to meet agronomic requirements of Salvia miltiorrhiza
4 機構設計與試驗
4.1 機構結構設計
五桿式丹參移栽機構三維模型如圖17所示,由雙曲柄五桿機構、鴨嘴栽植器、凸輪控制機構和扇形平衡配重組成。
雙曲柄五桿機構控制鴨嘴栽植器做往復運動進行接苗和移栽;鴨嘴栽植器是進行移栽的末端執行裝置,負責將丹參種苗植入鴨嘴栽植器形成的穴中;凸輪控制機構控制鴨嘴栽植器開閉使丹參種苗由栽植器進入穴中;平衡配重用于平衡移栽機構的慣性力和慣性力矩。
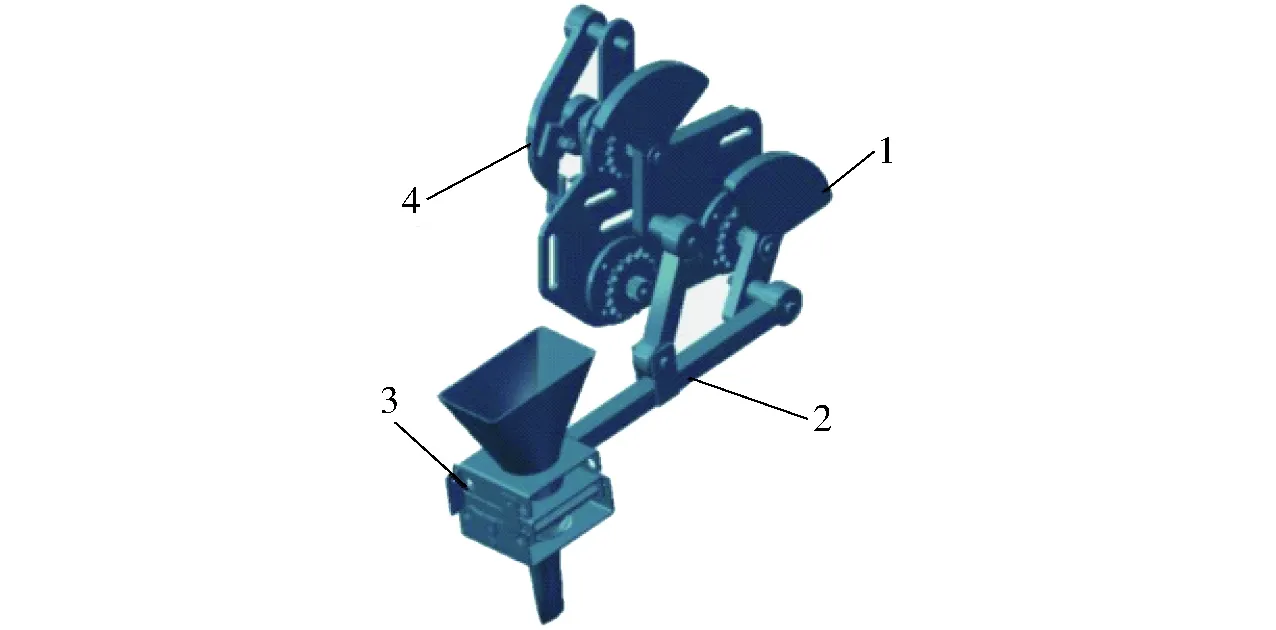
圖17 五桿式丹參移栽機構三維模型Fig.17 Three-dimensional model of five-bar transplanting mechanism of Salvia miltiorrhiza1.平衡配重 2.雙曲柄五桿機構 3.鴨嘴栽植器 4.凸輪控制機構
為提高鴨嘴栽植器與丹參種苗的匹配度,鴨嘴栽植器的相關參數根據丹參種苗植株形態參數確定。隨機選取50株同一適栽期內的紫花丹參種苗,運用LA-S系列植物圖像分析儀依次測量其植株形態參數,如圖18所示。
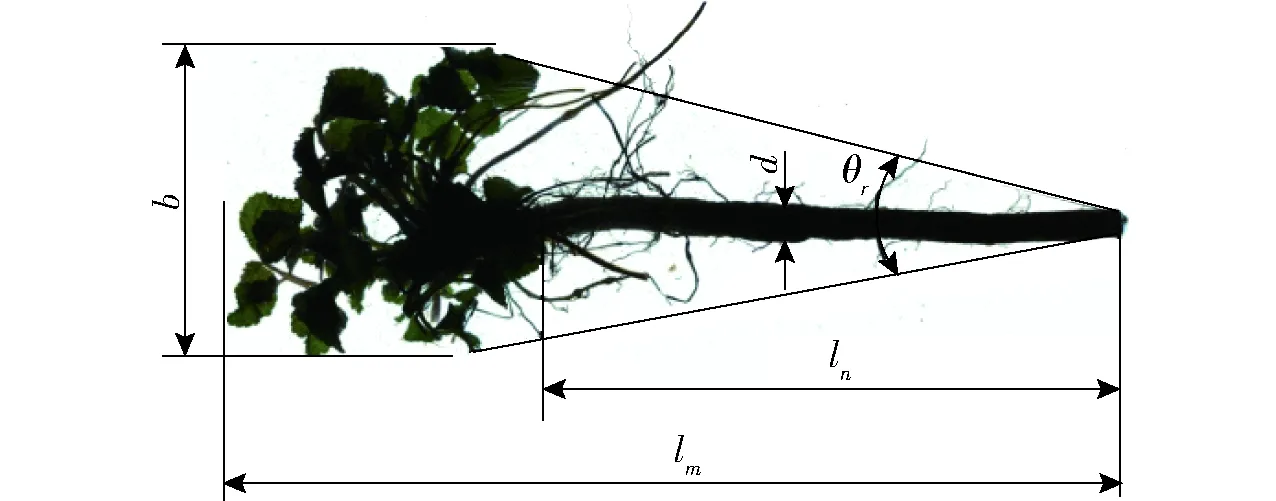
圖18 LA-S系列植物圖像分析儀系統提取的圖像Fig.18 Picture extracted by LA-S image processing system for plant
圖中θr——株形錐角,(°)
ln——根長度,mm
d——根直徑,mm
lm——植株總長度,mm
b——植株幅寬,mm
測量結果如表3所示。
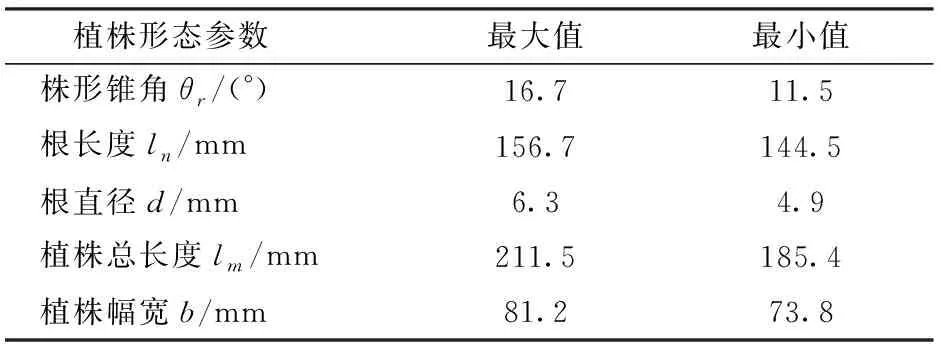
表3 丹參植株形態測量數據Tab.3 Measurement data of plant morphology of Salvia miltiorrhiza
由表3中的數據可得,栽植器鴨嘴總長度不低于植株總長度的最大值,選為212 mm;栽植器鴨嘴的錐角角度不低于株形錐角的最大值16.7°,選為17°;鴨嘴栽植器開口開度不低于植株幅寬的最大值81.2 mm,選為82 mm。
4.2 臺架試驗
臺架試驗是通過測量機構栽植器端點形成的實際軌跡情況,以驗證數學模型的準確性以及人機交互可視化輔助界面的可靠性。
樣機和試驗平臺如圖19所示。試驗平臺由五桿式丹參移栽機構、YSJ-750型調速電動機(減速比:1∶15)、JAC580N型變頻器(供電電壓:380 V)、SJM12-10P1型霍爾式轉速傳感器(最大檢測距離:10 mm)、160K-C-8GB型高速攝像機(2 000 f/s)、HHZ1型數顯轉速表(供電電壓:220 V)組成。
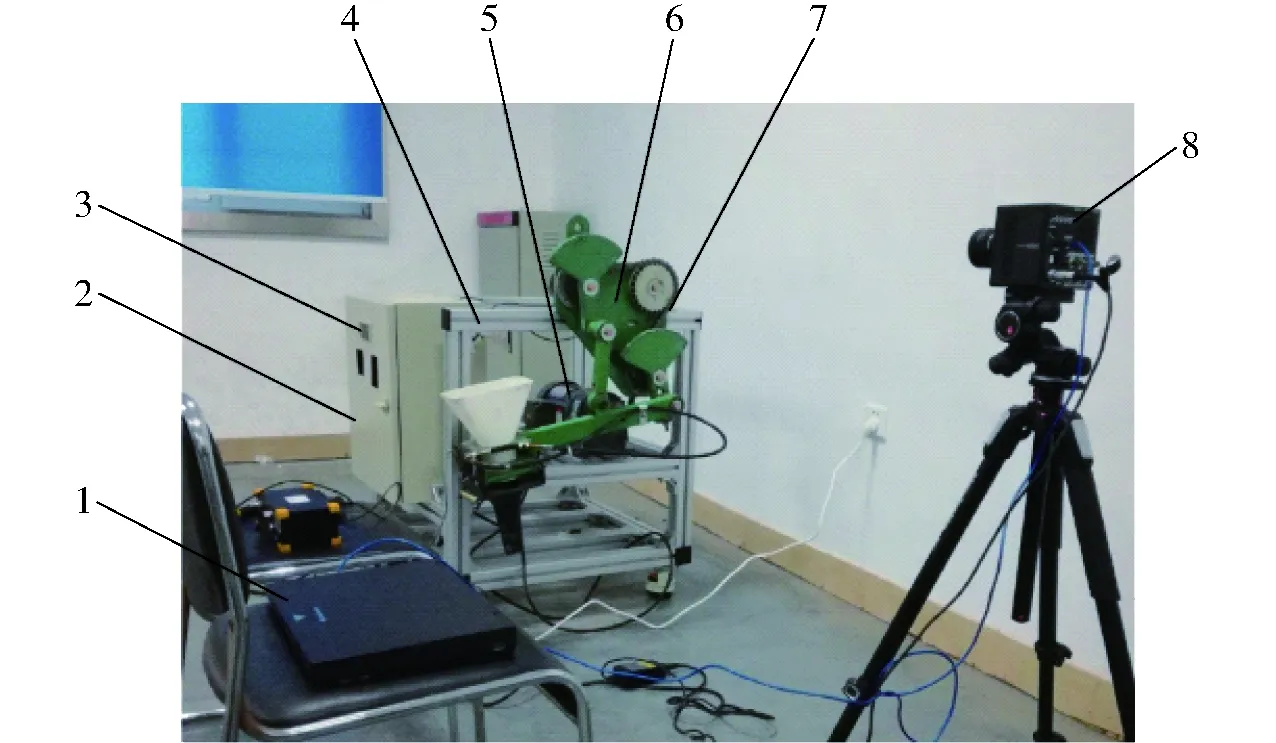
圖19 試驗平臺Fig.19 Test platform1.計算機 2.變頻柜 3.數顯轉速表 4.機架 5.調速電動機 6.移栽機構 7.霍爾式轉速傳感器 8.高速攝像機
通過高速攝像機測量五桿式丹參移栽機構樣機實際相對運動軌跡,以便與軟件仿真進行對比。利用高速攝像系統得到機構實際相對運動軌跡如圖20所示。圖16a理論相對運動軌跡與實際相對運動軌跡相比基本一致,驗證了理論模型的準確性。

圖20 移栽機構實際測量的相對運動軌跡Fig.20 Actual measurement relative motion of transplanting mechanism
4.3 田間試驗
4.3.1試驗條件
為驗證移栽機構理論設計的正確性,試制了搭載五桿式丹參移栽機構的丹參膜上移栽機樣機。該機采用25 kW輪式拖拉機牽引,其作業速度為0.25 m/s,根據上述作業條件對移栽機進行重復性田間試驗,試驗在山東省農科院藥用植物研究中心實驗基地進行,如圖21所示。

圖21 田間移栽試驗Fig.21 Field transplanting test
4.3.2試驗方法與設備
試驗采用育苗基地培育的紫花丹參種苗進行大壟膜上移栽試驗,按照我國旱地移栽機械作業標準(JB/T 10291—2013)進行,每次重復試驗移栽200株丹參種苗,重復3次。丹參種苗平均長度約為200 mm,主莖的平均長度約為150 mm,記錄并測定旱地移栽機械作業標準中的主要性能指標,其中丹參移栽的立苗程度以移栽后丹參種苗主莖與壟面的夾角α來判定:α≤45°為倒伏,α>45°為合格,α>80°為優秀[23]。
試驗設備及參數設置包括:187-101型數顯角尺(量程:0~360°)、卷尺(量程:1~3 m)、標桿和計時器等。
4.3.3試驗結果
田間試驗結果如表5和表6所示。
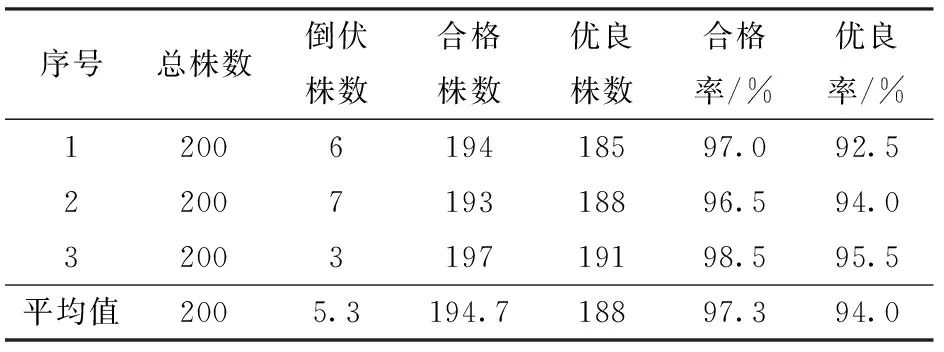
表5 丹參種苗立苗率測量數據Tab.5 Measurement data of seedling erectness rate of Salvia miltiorrhiza
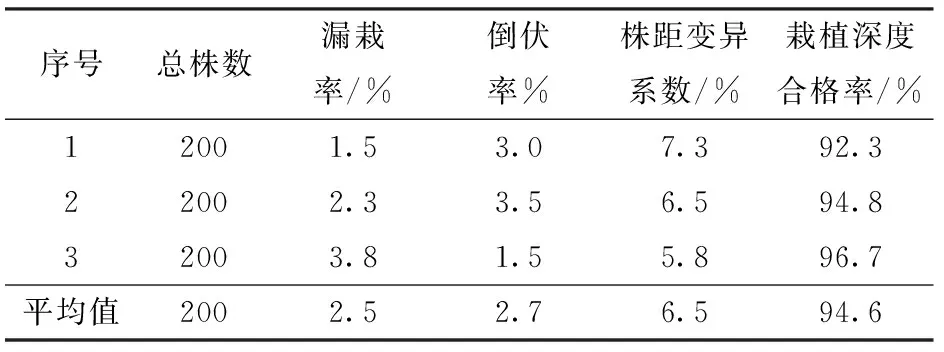
表6 主要移栽性能測量數據Tab.6 Measurement data of main transplanting performance
表5為丹參種苗田間立苗率測量數據,立苗合格率平均值為97.3%,滿足旱地移栽機械作業標準中規定的立苗率要求,立苗優良率平均值為94%,滿足丹參裸苗移栽的立苗率要求;表6為主要移栽性能測量數據,移栽性能滿足旱地移栽機械作業標準中規定的性能指標,漏栽率平均值為2.5%,倒伏率平均值為2.7%,造成漏栽的原因是部分丹參種苗長有較多須根,在回程過程中鴨嘴栽植器閉合時夾住須根回帶丹參種苗而引起了漏苗和倒伏;株距變異系數平均值為6.5%,是由于機器作業速度發生波動而引起;栽植深度合格率平均值為94.6%,究其原因是移栽試驗田地形起伏以及起壟高度誤差造成。
5 結論
(1)根據丹參移栽的農藝要求設計了一種五桿式丹參移栽機構,并建立了機構所處工況的約束條件、自由運動約束條件。結合機構運動學模型采用Matlab開發了人機交互可視化輔助界面,通過人機交互的方式進行軌跡區域定位分析,并獲得了機構關鍵參數對鴨嘴栽植器相對和絕對運動軌跡特性的影響規律。
(2)借助輔助界面運用軌跡區域定位和數值循環比較法,優選出了一組滿足丹參種苗移栽農藝要求,同時保證丹參立苗率的機構參數組合:l1=290 mm、l2=100 mm、l3=120 mm、l4=231 mm、l5=60 mm、l6=229 mm、l7=243 mm、l8=100 mm、l9=45 mm、θ1=45°、θ2=90°、θ5=114°、θ7=90°、θ8=90°。
(3)運用LA-S系列植物圖像分析系統對丹參種苗植株形態特征參數進行了測量,根據特征參數得到了栽植器鴨嘴的設計參數:鴨嘴總長度為212 mm;鴨嘴錐形錐角為17°;鴨嘴開口開度為82 mm。
(4)研制樣機進行了田間試驗,結果表明五桿式丹參移栽機構立苗合格率為97.3%、立苗優良率為94.0%、漏栽率為2.5%、株距變異系數為6.5%、栽植深度合格率為94.6%,滿足丹參種苗裸苗膜上移栽的農藝要求、作業質量和立苗率要求。