全景相機轉臺低重力補償裝置研究
2018-09-17 09:26:42王洪光景鳳仁
機械設計與制造 2018年9期
楊 毅 ,常 勇 ,王洪光 ,景鳳仁
(1.中國科學院沈陽自動化研究所 機器人學國家重點實驗室,遼寧 沈陽 110016;2.中國科學院大學,北京 100049)
1 引言
隨著人類太空探索活動的增多,空間機器人在承受太空中惡劣環境、擴大人類空間活動能力、提高安全性、和經濟效益等方面的優勢受到世界各國的重視[1]。空間機械臂是太空活動中常用的機器人設備,為了保證空間機器人在太空中準確完成各種任務,在地面模擬空間機器人低重力、零重力以研究其各項物理性能是一個很重要的研究內容。目前常用的地面機械臂低(零)重力模擬方法有:氣浮法、水浮法、吊絲法[2-3]。
氣浮法是利用噴氣推力的反作用力抵消機械臂重力。氣浮法結構簡單、使用方便,但僅能提供兩自由度2維空間內的功能測試,對機械臂的運動形式有一定要求。文獻[4]研制的SSRMS地面實驗系統、文獻[5]開發的雙臂自由飛行空間機器人系統以及文獻[6]雙臂自由飛行機器人系統,均使用了氣浮法進行相應的地面重力補償實驗研究。
水浮法是利用水產生的浮力,并通過適當的配重使空間機器人系統在水中懸浮,即通過水的浮力來補償機器人的重力影響。該方法能實現空間機器人三維工作空間上的物理仿真,但系統密封性要求高、設備維護費用高。國外大學的漫游者NBV和某智能機械研究所空間機械臂進行了水浮法研究[7-8]。
吊絲法是利用吊絲拉力抵消機械臂重力的一種方法,吊絲拉力由配重塊重力或滾筒主動收放吊絲產生的拉力提供。根據吊絲拉力跟隨實驗物移動的情況,吊絲法可分為主動式和被動式。吊絲法可實現機械臂三維空間重力補償,主要依靠平面跟隨裝置及滾筒收放吊絲裝置,系統較復雜。國外某大學采用此方法對空間機械臂進行了重力補償實驗研究[9-10]。
針對月球表面探測的全景相機轉臺的重力補償開展研究。該轉臺機構相對簡單,結構緊湊,現有的重力補償裝置很難滿足要求,根據轉臺機構和結構特點,設計了一種主動式吊絲重力補償裝置,該裝置包括補償操作臂、吊絲配重單元和力傳感器單元,通過補償操作臂與轉臺同步運動,實現全景相機轉臺的重力補償。
2 低重力補償機構方案分析
2.1 全景相機轉臺
全景相機轉臺搭載在月球探測器上,末端負載為全景相機,如圖1所示。全景相機轉臺方位軸、俯仰軸的軸向分別沿垂直于和平行于水平方向,但并不正交。方位關節的定子固定于基座,轉軸連接俯仰關節的定子,俯仰關節的轉軸連接負載(即相機)。
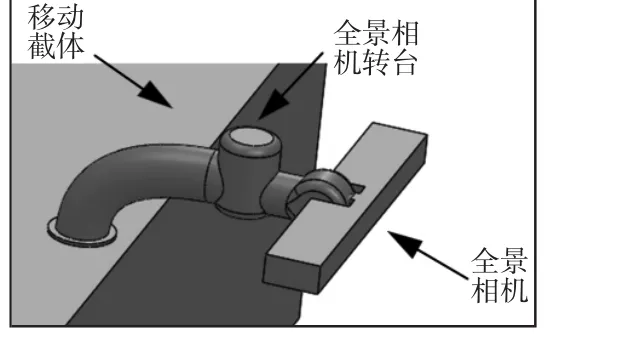
圖1 全景相機轉臺Fig.1 Panoramic Camera Turntable
2.2 吊絲方案分析
轉臺各連桿的到轉軸尺寸很小,運動精度要求較高。因此轉臺的重力補償裝置要求結構簡單、控制方便且滿足重力卸載精度要求,基于重力補償方法的調研分析,選定吊絲配重方案實現轉臺的重力補償。
為減少裝置的復雜度,初步方案,如圖2(a)所示。操作臂支撐吊絲系統,且與轉臺方位關節同步運動;轉臺方位臂由懸掛在操作臂上的滑輪、吊絲和配重塊進行重力補償,運動中吊絲保持豎直;轉臺俯仰臂由滑車、滑輪、吊絲和配重塊進行重力補償,吊絲在滑車主動調節下保持豎直。圖2(a)可以實現轉臺兩個機械臂的重力補償,此方案不足:由于轉臺尺寸較小,滑車系統較為復雜,控制精度不易于滿足要求,且俯仰臂配重塊上下有移動。
補償操作臂與轉臺機構相同,操作臂各關節與轉臺對應各關節同步運動,如圖2(b)所示。補償操作臂俯仰軸連桿有兩個滑輪支撐吊絲,通過配重塊對轉臺俯仰軸負載進行重力補償。該方案存在不足:當俯仰臂非水平位置時吊絲非豎直,影響重力補償精度,且配重塊上下有移動。
為了減少轉臺俯仰軸吊絲配重塊上下運動的影響,補償操作臂俯仰軸兩滑輪中心相對轉臺俯仰軸及俯仰軸負載質心位置在水平位置上相差小滑輪半徑r,如圖2(c)所示。兩個小滑輪圓心、轉臺俯仰軸和俯仰軸連桿吊點在同一平面內組成平行四邊形結構,當操作臂與轉臺各關節同步運動時,兩套吊絲配重單元吊絲始終保持豎直,配重塊上下無移動。
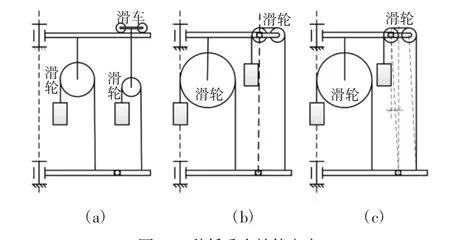
圖2 三種低重力補償方案Fig.2 Three Kinds of Low Gravity Compensation Scheme
2.3 平行四邊形重力補償機構分析
俯仰臂吊絲低重力補償裝置使用一個自由度解決了轉臺俯仰臂三維空間內的重力補償以及配重塊上下移動的問題。如圖3所示。o22的水平位置相對于o12的位置偏移滑輪半徑r,即連桿o11o12長度較連桿o21o22的長度長r,o12o13o21o22組成平行四邊形機構。o13為轉臺俯仰臂負載質心位置也是吊絲點,a1、a2、a3、a4為吊絲與滑輪的切點。滑輪o22和滑輪o23半徑相等。令a1到吊點o13的吊絲長度為d,其中,lo12o13長度為l3。

圖3 平行四邊形原理圖Fig.3 Principle Diagram of Parallel Quadrilateral
所以a4o13垂直X軸。

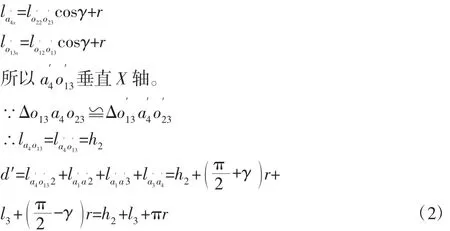
式中:h2—吊絲長度;l3—o12到 o13的距離;r—滑輪半徑。
在o12o13o22o23平行四邊形結構中,當俯仰臂水平時,吊絲與兩個滑輪之間包角之和為180°;當轉臺俯仰軸和同步臂俯仰軸同向轉動角度γ后,左邊滑輪與吊絲的包角減少(增加)γ,而右邊滑輪與吊絲的包角增加(減少)γ,兩個滑輪與吊絲的包角為180°。所以當俯仰臂轉動角度γ后,a4o13吊絲保持豎直,配重塊質心Y軸位置不變,若兩滑輪為全滑動,則兩滑輪相對于桿o22o23沒有轉動。因此,方案在運動期間支撐臂、配重塊及吊絲對轉臺影響較小。
2.4 低重力補償裝置模型設計
為了保證低重力補償方案重力補償精度,結構上需要保證吊絲吊點、吊絲配重塊質心及重力補償對象質心在同一平面內。另外,轉臺質心位于左右對稱線上,各機械臂滿足剛度要求。
系統方案主要包括操作臂、吊絲配重單元、全景相機轉臺、控制單元和隔振平臺單元,如圖4(a)所示。模型中全景相機轉臺與實際全景相機轉臺外形不同,但質量、質心分布相同。為了保證控制的精度,各關節均有兩個角度傳感器,一個檢測關節轉角,另一個檢測電機轉角。
轉臺方位臂由驅動單元、圓光柵、編碼器和臂體組成,俯仰關節驅動單元安裝于方位臂一側,編碼器及配重塊安裝于另一側,保證了方位臂質心位置居于中間,如圖4(b)所示。此時轉臺方位臂質心相對于方位軸距離較大,因此,在轉臺方位關節處增加配重塊,調節質心位置。全景相機轉臺安裝在六維力傳感器上,為保證其檢測轉臺力和力矩的準確性,轉臺不能增加自身之外的結構支撐。如圖4(b)所示,在轉臺方位關節驅動單元上安裝兩個軸承,軸承內側為電機外殼及減速器外殼,軸承外側為方位臂外殼及軸套,使用不與外側接觸的圓光柵對關節轉角進行角度檢測,這種設計不僅增加了轉臺結構的可靠性,同時使六維力傳感器不受外力干擾。
3 誤差分析
全景相機轉臺低重力補償裝置采用的是主動式吊絲卸重,補償操作臂與轉臺需要同步運動才能使吊絲豎直,保證重力補償精度。但實際運動控制過程中,補償操作臂與轉臺運動一致性很難保證,關節存在偏角,影響重力補償精度。
由于控制誤差,操作臂與轉臺方位臂轉角產生偏角,引起吊絲豎直偏角,如圖5所示。圖中:R—同步臂滑輪半徑;h1—吊絲與滑輪切點到吊絲與機械臂連接點長度;d1—上臂吊絲吊點偏移距離。當操作臂方位臂與轉臺方位臂存在夾角α1時,切點b以方位軸為圓心,旋轉α1角度后到達切點b′,吊絲豎直方向產生夾角β1。吊絲帶動滑輪轉動產生的摩擦力f1,方向與滑輪轉動方向相反。
重力補償精度為:

式中:m1—配重塊質量;
M1—轉臺方位軸連桿質量;
f1—滑輪摩擦力。

圖5 方位關節轉角誤差圖Fig.5 Azimuth Joint Rotation Angle Error
轉臺俯仰臂、操作臂俯仰臂旋轉γ角,由于存在控制誤差操作臂俯仰臂實際旋轉γ±α2,如圖6所示。q2、q3和q4是滑輪與吊絲的切點,角α2較小、h2相對滑輪半徑r較大,認為q3和q4切點分別于在同一水平面。四邊形和四邊形為平行四邊形,所以邊長等于邊長 q2q3,邊長等于邊長q2q4。由操作臂的俯仰臂和轉臺的俯仰臂夾角引起的吊絲豎直夾角為直角三角形p2cq3、直角三角形p2q2e的頂角β21、β22。
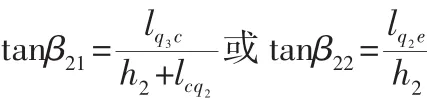
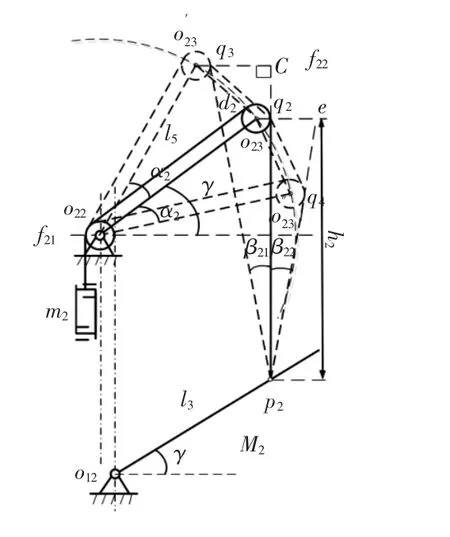
圖6 俯仰關節轉角誤差圖Fig.6 Pitch Joint Rotation Angle Error
吊絲豎直夾角的大小與滑輪o23圓點理論點和實際點的距離在水平線上的投影大小成正相關。當豎直線平分誤差角時滑輪o23圓點理論點和實際點的距離在水平線上的投影最大。

轉臺俯仰臂重力補償精度為:

式中:m2—配重塊質量;M2—轉臺俯仰軸負載質量,摩擦力f2大小根據α2相對γ偏角方向確定。
如圖7(a)所示,同時考慮誤差偏角α1和α2時吊絲豎直偏角示意圖。其中實線為無誤差狀態下的操作臂和轉臺位置,操作臂的方位臂相對轉臺的方位臂存在誤差α1,X軸平分α1角,操作臂的俯仰臂相對轉臺的俯仰臂存在誤差α2。q1、q2和q3為吊絲與滑輪的切點,角α2較小、h2相對滑輪半徑r較大,認為q3和q4切點分別于o′23和o″23在同一水平面。p1為吊絲在轉臺俯仰臂上的吊點,p2、p3分別是q2、q3在轉臺俯仰臂上的豎直投影點。l1是轉臺方位軸到吊點的長度,l2是轉臺方位臂長度,l3是轉臺俯仰臂吊絲吊點到轉臺俯仰軸距離,l4是操作方位臂長度,l5是操作俯仰臂頂端滑輪圓點到操作臂俯仰軸距離。
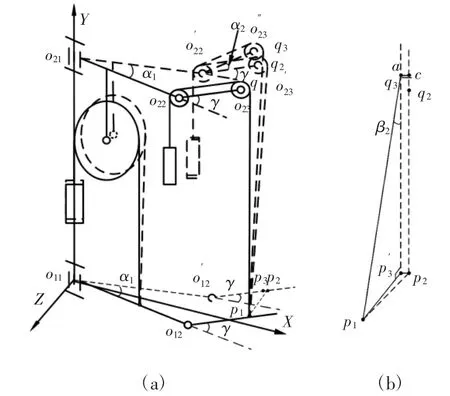
圖7 操作臂、轉臺轉角誤差圖Fig.7 Operating Arm、Turntable Rotation Angle Error
結合圖6、圖7分析可知,在α1和α2誤差下吊絲在轉臺俯仰臂上的吊點(圖7(a)中p1點)可以看作是由α1誤差下吊絲在轉臺俯仰臂上的吊點p2轉移至p1。面上的投影點,角β2是在α1和α2誤差下俯仰臂吊絲豎直偏角,如圖 7(b)所示。長度等于ac長度。
由圖 7(b)可知,loc為 lo23o′23在水平面的投影長度,lbc為在豎直線上的投影長度,俯仰臂轉動時lac與lbc成反向變化。由公式X 可知,當 lac最大、lbc最小時 tanβ2最大,即 o23o′23或 o23o″23平行于水平面時最大。

在同時考慮誤差角α1和α2下,轉臺俯仰軸負載重力補償精度為:

通過上述分析可知,在俯仰臂轉角γ、方位臂轉角誤差α1、俯仰臂轉角誤差α2、各臂長l、各配重塊質量m以及各連桿質量M已知下,方位臂吊絲重力補償精度與滑輪半徑R、吊絲高度h1及滑輪摩擦力f有關,俯仰臂吊絲重力補償精度與h2有關。上述分析為低重力補償系統中吊絲豎直長度的設計提供了依據。
4 仿真研究
在完成吊絲配重補償機構設計與分析后,針對平行四邊形機構及低重力補償方案進行了仿真實驗,以驗證平行四邊形機構特點的正確性和系統重力補償精度、力矩補償精度。
4.1 仿真模型
利用SolidWorks軟件對系統模型進行簡化,簡化后模型質心和質量與三維模型相同。將簡化后的模型導入Adams軟件,設置模型之間運動關系及吊絲系統。配重塊質量為重力補償對象質量的5/6,吊絲吊點在相應質心處。仿真實驗分兩部分,g條件下全景相機轉臺低重力補償裝置仿真實驗和1/6g條件下全景相機轉臺仿真實驗,然后對兩次仿真實驗數據進行對比分析。仿真各關節運動形式,如圖8所示。
圖8 系統仿真模型各關節速度Fig.8 System Simulation Model Joint Velocity
4.2 仿真結果分析
如圖9(a)可見,兩個配重塊質心在豎直方向的位置沒有因轉臺的轉動而發生大的變化,證明方案中平行四邊形結構的機構特點。錨點1、錨點2為全景相機模擬轉臺俯仰臂重力補償吊絲兩端連接點,錨點3、錨點4為全景相機模擬轉臺方位臂重力補償吊絲兩端連接點。如圖9(b)所示,通過Adams分析得出,錨點1與錨點2受力最大差值為0.001N,錨點3與錨點4受力最大差值為0.0015N。由于吊絲經過滑輪,吊絲與滑輪的靜摩擦造成吊絲兩端拉力不同。

式(6)是重力補償精度公式。
式中:F差值—實際拉力與理論拉力差值;M—被補償對象質量。
轉臺方位臂重力補償精度為0.003%,轉臺俯仰臂重力補償精度為0.04%。六維力傳感器位于全景相機模擬轉臺底座下面,檢測轉臺在重力補償后的豎直重力及傾覆力矩。由圖9(c)可知,在1/6g條件下由六維力傳感器豎直受力可得轉臺重力10.348N,在g條件下由六維力傳感器豎直受力可得轉臺重力10.354N,轉臺整體重力補償精度為0.012%。式(7)為傾覆力矩卸載精度及轉矩補償精度。

式中:T差值—實際力矩與理論力矩的絕對值;T5/6—理論力矩的5/6。
傾覆力矩是指由轉臺方位臂重力相對于轉臺底座引起的力矩。傾覆力矩補償精度和轉臺方位臂重力補償精度有關。圖9(c)顯示轉臺方位臂傾覆力矩在不同條件下的大小,其精度在0.18%以內。如圖9(d)所示,g條件下低重力補償系統中全景相機轉臺方位關節、俯仰關節的轉矩與1/6g條件下全景相機轉臺方位關節和俯仰關節的轉矩,如圖9(d)所示。其中,方位關節力矩由于吊絲系統的影響出現偏值,但整體轉矩補償精度在1%以內。
圖9 仿真實驗結果Fig.9 Simulation Results
5 總結
針對全景相機轉臺的結構特點提出了一種主動式吊絲配重方案。支撐吊絲、配重塊的同步臂與轉臺相似,轉臺方位臂直接采用吊絲、滑輪和配重塊進行重力補償,轉臺俯仰臂采用了同步臂俯仰臂、轉臺俯仰臂和吊絲組成的平行四邊形結構,簡化了轉臺俯仰臂重力補償的機械結構。該方案機械結構簡單、控制方便。
然后對平行四邊形機構進行了構型證明,并對全景相機轉臺低重力補償裝置控制誤差引起的吊絲豎直偏角及重力補償誤差進行了理論分析。最后對該裝置進行Adams動力學仿真。通過仿真分析,驗證了平行四邊形結構特點,轉臺俯仰關節轉動時配重塊上下無位移;同時驗證了全景相機轉臺低重力補償裝能夠實現轉臺低重力模擬。仿真結果為系統安裝調試工作提供了理論基礎。下一步將研究轉臺質量及質心測量,以及同步臂和轉臺同步運動的控制系統。
