雙輪倒立擺機器人的模型預測控制策略
2018-09-17 09:27:32孔國利張璐璐
機械設(shè)計與制造 2018年9期
孔國利,張璐璐
(鄭州工程技術(shù)學院 信息工程學院,河南 鄭州 450000)
1 引言
雙輪倒立擺機器人(Two Wheeled Inverted Pendulum Robot,TWIPR)具有結(jié)構(gòu)簡單、操作靈活、機動性高和油耗低等優(yōu)點,使其受到了國內(nèi)外學術(shù)界和各領(lǐng)域的廣泛關(guān)注,如航空航天、高端裝備制造、智能機器人和工業(yè)過程等[1-2]。典型的TWIPR系統(tǒng)主要包括一對相同的車輪、底盤、驅(qū)動器、倒立擺和運動控制單元等部分,其中運動控制單元的作用在于確保倒立擺機器人運動的準確性和穩(wěn)定性。因此,研究對TWIPR進行精確控制的方法成為需要解決的難題。
現(xiàn)有研究結(jié)果表明,TWIPR被普遍認為是一種非線性且不穩(wěn)定的欠驅(qū)動系統(tǒng),因而設(shè)計相應(yīng)的控制策略成為最具挑戰(zhàn)性的研究方向之一。目前,各種先進的現(xiàn)代控制技術(shù)已經(jīng)被廣泛應(yīng)用于復雜的TWIPR系統(tǒng),如,PID控制器[3-4]、自適應(yīng)極點配置(Adaptive Pole Placement)控制器[5]和線性二次調(diào)節(jié)(Linear Quadratic Regulator,LQR)控制器[6]等。除此之外,滑模(Sliding Mode)控制器也被用于TWIPR系統(tǒng)的控制[7-8],該控制器所具有的強魯棒性可以有效解決由被控系統(tǒng)的參數(shù)變化和不確定性擾動而造成的不利影響。為此,設(shè)計了一種高效的模型預測控制(Model predictive control,MPC)方法對不穩(wěn)定的TWIPR系統(tǒng)進行準確控制,利用過程的顯示模型對系統(tǒng)的性能進行優(yōu)化。同時,采用一種確定性的自回歸滑動平均(Deterministic Autoregressive Moving Average,DARMA)模型對TWIPR系統(tǒng)進行數(shù)學建模,而MPC控制器的設(shè)計則利用該TWIPR模型的一個線性狀態(tài)空間。通過與LQR控制器進行比較,設(shè)計的MPC控制器能夠有效降低控制系統(tǒng)的均方根誤差,具有更強的優(yōu)越性和可靠性。
2 動力學模型
倒立擺系統(tǒng)的動力學模型是通過直接對其物理學特性進行運動機理分析而獲得的[9]。盡管可以簡單有效地建立TWIPR的動力學模型,但是在建模過程中對非線性系統(tǒng)的簡化和線性化處理可能會降低建模精度。為了避免上述建模過程的不足,釆用了DARMA模型對倒立擺機器人進行數(shù)學建模。采用牛頓-歐拉(Newton–Euler)方法建立TWIPR系統(tǒng)的數(shù)學模型,如圖1所示。
其中,TWIPR系統(tǒng)的運動位置和方向可以通過提供驅(qū)動力矩的兩個獨立驅(qū)動器獲得。設(shè)計的MPC控制器的目標在于調(diào)節(jié)控制TWIPR系統(tǒng)的位移x,方位角θ和傾斜角α分別達到理想值xd,θd和0。假設(shè)車輪和地面之間沒有任何的相對滑動,作用于左右輪上的平衡力和力矩使其獲得運動方程,如式(1)所示。
式中:Mw、Iw—TWIPR 左右兩個車輪的質(zhì)量和轉(zhuǎn)動慣量;Fl、Fr—左右車輪與平臺之間的相互作用力;Hl、Hr—作用在左右車輪上的摩擦力;dl、dr—左右車輪的外部作用力;θl、θr—在左右車輪的運動轉(zhuǎn)角;xl、xr—左右車輪在TWIPR運動方向上的位移;α、θ—倒立擺的傾斜角和車輛的方位角;r、m—車輪半徑和倒立擺質(zhì)量。
作用在倒立擺上沿x方向上的平衡力和繞重力中心點O的轉(zhuǎn)矩可以數(shù)學表示,如式(2)所示。
為了驗證所建立的TWIPR模型的準確性和預測控制器的有效性,需要搭建相應(yīng)的仿真系統(tǒng),主要由預測控制器和倒立擺模型兩部分組成。在通常情況下,MPC控制器需要預先設(shè)定參考軌跡,然后根據(jù)建立的TWIPR模型輸出反饋進行反復校正,最終獲得最優(yōu)的預測控制量。這里的兩個倒立擺的模型參數(shù)均設(shè)置如下:m=95kg,M=44.5kg,Mw=6.55kg,IM=5kg·m2,Ip=137kg·m2,d=0.55m,l=1.026m,r=0.223m和Iw=0.17kg·m2。控制流程圖,如圖2所示。
國內(nèi)外常用的土壤重金屬污染程度評價方法有單因子污染指數(shù)法、地積累指數(shù)法、內(nèi)梅羅綜合指數(shù)法、潛在生態(tài)危害指數(shù)法[5],還有利用地質(zhì)統(tǒng)計學來評價重金屬污染空間特征及危險性評價的方法[6-7]。這些評價方法各有優(yōu)缺點,也有不同的適用性,沒有系統(tǒng)的分類及統(tǒng)一的標準[8]。本文欲考慮成巖過程的自然地質(zhì)作用對土壤重金屬背景值的變動影響下來評價農(nóng)田土壤中重金屬的潛在生態(tài)危害,故選取地積累指數(shù)法及潛在生態(tài)危害指數(shù)法來對鈾礦尾礦庫周邊的農(nóng)田土壤重金屬污染狀況進行綜合評價。
1.觀察組和對照組患者治療依從性比較:觀察組138例CP患者中治療依從性良好137例,良好率99.3%;對照組CP患者治療依從性良好116例,良好率84.1%。觀察組CP患者治療依從性顯著優(yōu)于對照組,差異有統(tǒng)計學意義(P<0.05)。

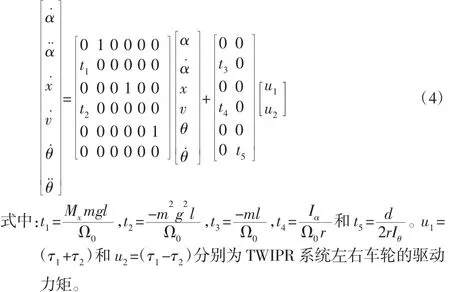
聯(lián)立式(1)至式(3),可以得到TWIPR系統(tǒng)的運動方程。接下來,若定義狀態(tài)的六維矢量為[α α˙x v θ θ˙],則 TWIPR 系統(tǒng)的狀態(tài)空間方程可表示為矩陣,如式(4)所示。
做好雨污分流,有利于減少污水產(chǎn)生量,降低運營成本,有利于降低垃圾堆體含水率,減少臭氣產(chǎn)生量,提高堆體穩(wěn)定性,是實現(xiàn)生活垃圾衛(wèi)生填埋的關(guān)鍵所在。
顯然,上式中的目標函數(shù)具有如下的離散二次結(jié)構(gòu):
3 TWIRP的預測控制器設(shè)計
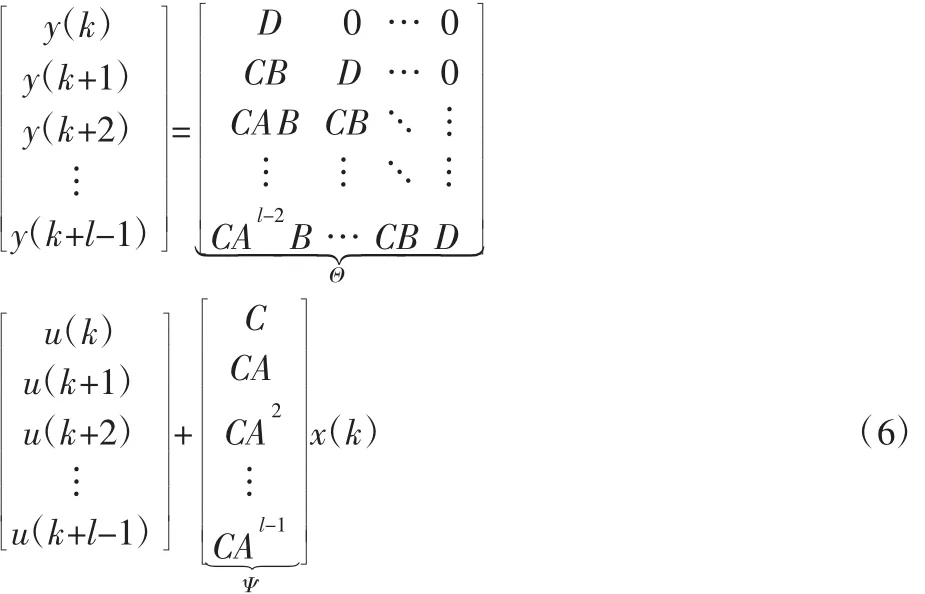
考慮到預測控制策略優(yōu)異的魯棒性和模型適應(yīng)性,對于TWIPR的穩(wěn)擺控制可以通過預測控制的方法來實現(xiàn)。設(shè)計的MPC算法主要包括三個共同元素,即預測模型,目標函數(shù)和控制規(guī)則[10]。同時,采用DARMA模型具有離散性和線性時變性,因而其狀態(tài)空間可表示,如式(6)所示。
致謝:感謝EvelyIle Barbin、Bj?rn Smestad及Hans Niels Jahnke在此文撰寫過程中給予的指導和幫助.
采用MATLAB軟件的Simulink模塊搭建設(shè)計的MPC控制器,其中MPC兩個獨立控制器的具體參數(shù)可分別通過求解式(6)和式(10)獲得。搭建的控制系統(tǒng)利用采樣時間為0.1s的零階保持器作為輸入信號,同時加權(quán)矩陣,如式(11)所示。
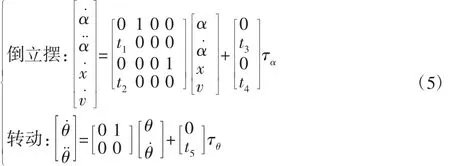
MPC控制器利用解耦單元將τα和τθ轉(zhuǎn)換為車輪轉(zhuǎn)矩τr和τl,使TWIPR繞z軸和y軸的轉(zhuǎn)動能夠被獨立控制,而其對應(yīng)的解耦單元設(shè)計為 tα=τl+τr和 tθ= τl-τr。因此,式(4)所描述的車輛狀態(tài)空間模型主要包括兩個解耦的子系統(tǒng),即倒立擺系統(tǒng)和轉(zhuǎn)動系統(tǒng),可別表示為式(5)所示。
接下來,主要集中于利用模型預測控制策略設(shè)計兩個相互獨立的MPC控制器。
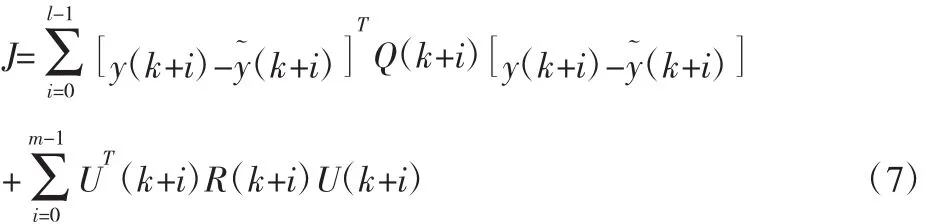
式中控制步長用m表示。同時,通過對加權(quán)對稱矩陣Q(k)和R(k)的調(diào)節(jié)可使控制系統(tǒng)獲得特定的性能。此外,出于簡化公式的目的,下面將引入兩個新變量,如式(8)所示。
在沒有任何約束的條件下,僅且有唯一的U(k)使得J存在最小值。因此,若令上式的一階偏導數(shù)為0,則可以得到最小值2HU(k)-2F。若 H 存在逆矩陣,則式(8)的唯一解為 U*(k)=H-1F。顯然,若H正定,則H的逆H-1存在,這就確保了J的二階導數(shù)同樣正定,故U*(k)為最小值點。但是,若H可能為病態(tài)矩陣時,則H的數(shù)值求逆過程應(yīng)當盡量避免。此時,可以采用將其等效為最小二乘問題進行數(shù)值求解,最終獲得最小值U*(k)。考慮到當加權(quán)矩陣為對角矩陣時,其矩陣的平方根可簡單等效為所有對角元素的平方根。因此,最小值U*(k)是標準方程式(9)的解。

式中:ml2—TWIPR系統(tǒng)繞y軸的轉(zhuǎn)動慣量;g、l—重力加速度和O點和重力中心點之間的距離。作用在平臺和倒立擺上的平衡力矩的數(shù)學表達式,如式(3)所示。

式中:“+”—矩陣的偽逆,從而有 U*(k)=Kε(k)為增益 K 和跟蹤誤差ε(k)的最優(yōu)控制過程。
4 仿真結(jié)果與分析
我剛點燃那堆干柴,小屋的門突然被推開了,一個淋得透濕的姑娘閃了進來,怯怯地問我:“大哥,天太冷了,我可以在您這兒烤烤火嗎?”我說:“當然可以,你過來吧。”姑娘說:“謝謝大哥!你這兒還有點可以吃的東西嗎?我餓得慌。”我說:“有,在鍋里蓋著呢,但現(xiàn)在已經(jīng)涼透了,我這就去給你熱一下。”
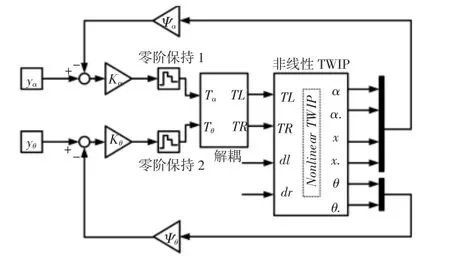
圖2 TWIPR控制系統(tǒng)的流程圖Fig.2 Flow Chart of TWIPR Control System
式中:l—預測間隔的離散步長的數(shù)目。

正如前文所述,控制目標是在各種干擾和外力條件下調(diào)節(jié)傾斜角α趨近于0。外力0.1sin(t)和階梯狀干擾應(yīng)用到TWIPR去驗證設(shè)計控制器的正確性,并將設(shè)計的MPC控制器與文獻[6]中LQR控制器進行比較,相關(guān)的仿真結(jié)果,如圖3~圖5所示。
MPC控制器和LQR控制器在相同加權(quán)矩陣的條件下的對比結(jié)果,如圖3~圖5所示。MPC控制器對于穩(wěn)定倒立擺系統(tǒng)要優(yōu)于LQR控制器。其中,MPC控制器對于梯狀干擾的傾斜角的響應(yīng)要比LQR控制器平穩(wěn)得多,而旋轉(zhuǎn)角的響應(yīng)則與LQR基本相當。此外,由圖5可以看出,設(shè)計的MPC控制器相對于LQR控制器來說需要更小的控制輸入力矩。然后,分別計算MPC和LQR控制器的均方根誤差(means square error,MSE)用以評估兩種控制方法的性能,相關(guān)的仿真結(jié)果,如表1所示。

圖3 MPC和LQR控制器對梯狀干擾力的傾斜角響應(yīng)Fig.3 Tilt Angle Response of the MPC and LQR Controller to the Stepped Disturbance Force
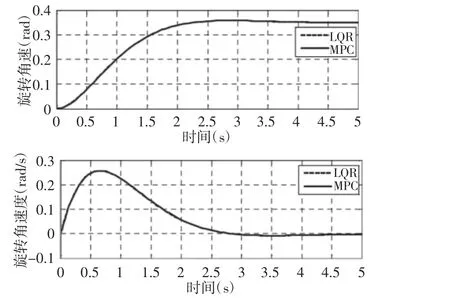
圖4 MPC和LQR控制器對梯狀干擾力的旋轉(zhuǎn)角響應(yīng)Fig.4 Totation Angle Response of MPC and LQR Controller to the Ladder Disturbing Force
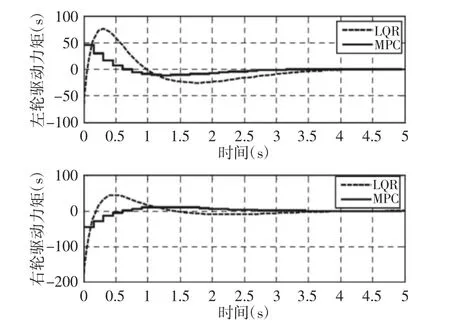
圖5 MPC和LQR控制器的左右輪驅(qū)動力矩Fig.5 Left and Right Driving Torque of the MPC and LQR Controller
從表1結(jié)果可知,MPC控制器對于梯狀和正弦外力的傾斜角響應(yīng)的MSE分別為1.0313×10-6和1.1753×10-6,而LQR控制器對應(yīng)的響應(yīng)則為0.0132和0.0134。同時,MPC控制器對于梯狀和正弦外力的旋轉(zhuǎn)角響應(yīng)的MSE分別為0.0158和0.0162,而LQR控制器對應(yīng)的響應(yīng)均為0.0263。顯然,在兩種外力驅(qū)動的條件下,設(shè)計的MPC控制器的均方根誤差要明顯小于LQR控制器,尤其是對傾斜角的控制性能,其原因主要在于MPC控制器的前饋控制能夠有效補償可測干擾。
決策式句法分析模型的典型代表是移近—歸約狀態(tài)轉(zhuǎn)移模型。移近—歸約狀態(tài)轉(zhuǎn)移模型在分析過程中維護一個堆棧和一個隊列,堆棧用以存儲到目前為止所有的依存子樹,隊列存儲尚未被分析到的詞。堆棧頂端和隊列的頭部確定了當前分析器的狀態(tài),依據(jù)該狀態(tài)決定進行移進、規(guī)約或者建立棧頂元素與隊首元素的依存關(guān)系的操作,從而轉(zhuǎn)入新的狀態(tài)。
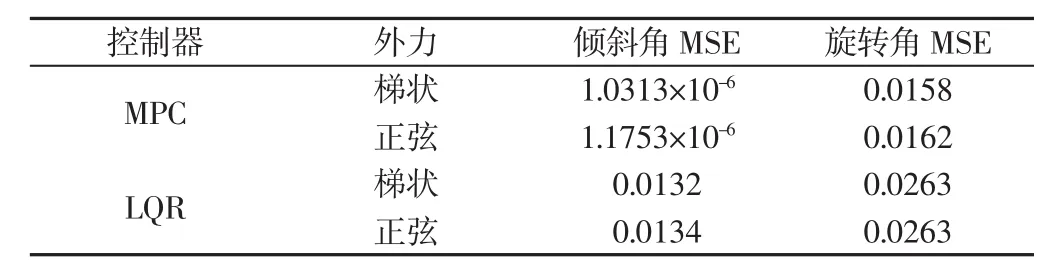
表1 兩種控制器的均方根(MSE)誤差的比較Tab.1 Comparison of the Root Mean Square(MSE)Error of the Two Controllers
5 結(jié)論
針對欠驅(qū)動的雙輪倒立擺機器人(TWIPR)的非線性系統(tǒng),使用模型預測控制(MPC)策略設(shè)計了兩個相互獨立控制器。為了簡化TWIPR系統(tǒng)的非線性模型,在其不穩(wěn)定平衡點附近進行線性化,然后利用解耦單元根據(jù)線性模型設(shè)計了兩個獨立MPC控制器,在存在梯狀干擾和兩個其他外部干擾的條件下,對設(shè)計的MPC控制器的有效性和可靠性進行驗證。最后,將設(shè)計的MPC控制器與線性二次調(diào)節(jié)(LQR)控制器進行對比分析,通過引入控制器的均方根誤差(MSE)評估其性能。仿真結(jié)果表明:設(shè)計的MPC控制器相對于LQR控制器具有更好的有效性和可靠性。此外,由于MPC的控制前饋能夠在本質(zhì)上補償各種可測干擾,使MPC控制器的抗干擾性和魯棒性同樣強于LQR控制器。
校園足球研究的作者地域遍布在24個省、自治區(qū)和直轄市(見表6),地域分布廣泛,但地區(qū)差異明顯,分布不均衡.從表6可以看出,校園足球的研究主要集中在上海、北京、廣東、湖北、山東、江蘇和遼寧等地,共發(fā)文76篇,占發(fā)文總量的61.29%,與這些地區(qū)的經(jīng)濟文化發(fā)展水平高,足球運動開展活躍有關(guān).
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
