可編程微機調速器在水輪發電機組一級過速保護中的應用
2018-09-18 09:56:54范小波劉加將周大鵬
數碼設計 2018年2期
范小波,劉加將,周大鵬
(1.四川華能巴塘水電有限公司,四川甘孜藏族自治州,627650;2.四川華能康定水電有限責任公司,四川甘孜藏族自治州,626000)
引言
水輪發電機組一級過速保護是防止機組過速的第一道重要保護措施,其動作的可靠性不僅關系到機組自身安全,還關系到電網的穩定運行。常規水輪發電機組一級過速保護因設計漏洞,在機組甩高負荷的情況下,極易造成保護誤動停機,致使機組無法實現聯網轉孤網運行功能,從而引起大面積、長時間停電事故的發生。通過本文提出的解決方法,能夠有效解決機組一級過速保護誤動問題,提升電網安全、可靠、穩定運行能力。
1 水輪發電機組過速情況下主配壓閥實際動作情況分析
某混流式水輪發電機在甩 75%負荷過程中機組轉速、導葉接力器行程變化曲線如圖1所示:
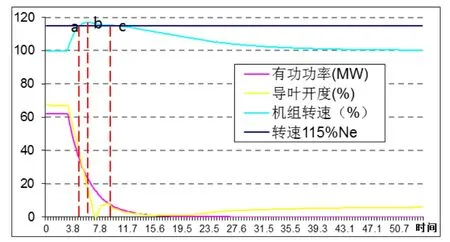
圖1 某機組甩75%負荷曲線Fig1 The curve of the 75% load rejection test for a Hydroelectric Generator
通過圖 1可以看出,當機組甩負荷后機組轉速由額定轉速上升至最高轉速期間,主配壓閥會立即向關方向動作將導葉關至最小;機組轉速由最高轉速降至額定轉速期間,由于調速器 PID調節特性和空載開度的設置[1],主配壓閥會向開方向動作。
2 常規一級過速保護容易引起保護誤動的具體原因
《GB?T 11805-2008 水輪發電機組自動化元件(裝置)及其系統基本技術條件》對水輪發電機組一級過速保護做出了明確規定,要求當機組甩負荷時,機組轉速上升到 110%~115%額定轉速,又遇調速器主配壓閥拒動,經過延時動作過速限制器和關閉進水閥實現緊急事故停機。通過筆者調研發現,各調速器廠家設計的一級過速保護動作邏輯為:機組轉速大于 115%額定轉速且主配壓閥拒動(主配壓閥不在關方向)位置信號通過一定延時啟動緊急事故停機。結合圖 1分析,在轉速超過 115%額定轉速至最高轉速期間(由a點至b點),主配壓閥一致處于關方向,保護動作條件不滿足,機組不會緊急事故停機;在轉速由最高轉速降至115%額定轉速期間(由b點至c點),由于PID調節規律,主配壓閥會向開方向動作,即主配壓閥不在關方向,此時機組轉速大于 115%額定轉速且主配壓閥拒動條件均已滿足,又因所甩負荷的大小決定機組轉速上升的速率,負荷越大,甩負荷時機組的轉速上升速度越快,因此不同的負荷會產生不同的甩負荷曲線,使轉速和主配壓閥位移曲線成為一個范圍,而不是一個固定值,從而導致延時時間無法準確確定,整定過大會導致機組進一步過速,整定過小勢必提高一級過速保護誤動的幾率。
3 可編程微機調速器在水輪發電機組一級過速保護中的應用
目前針對水輪發電機組常規一級過速保護誤動情況,部分電站采取在機組計算機監控系統程序中只判斷上升沿的115%額定轉速區間(即圖1中的a點到b點之間),在此區間若主配壓閥在關閉方向,則認為調速器是在正常動作而不出口停機,但此辦法只適用于無后備水機保護回路的系統,因判斷上升沿需要機組計算機監控系統進行程序處理[2]。而隨著可編程微機調速器在水輪發電機組控制上的普遍應用,筆者通過探索,提出了利用可編程微機調速器來優化主配壓閥拒動的判斷邏輯,有效解決了水輪發電機組常規一級過速保護誤動的問題,具體如下:
取消主配壓閥不在關方向位置信號作為主配壓閥拒動信號,采用主配壓閥行程大于主配壓閥中位偏差(死區)且導葉給定值與反饋值偏差大于整定值并通過一定延時作為主配壓閥拒動判據,該判據由可編程微機調速器編程實現,具體判斷邏輯如圖2所示。
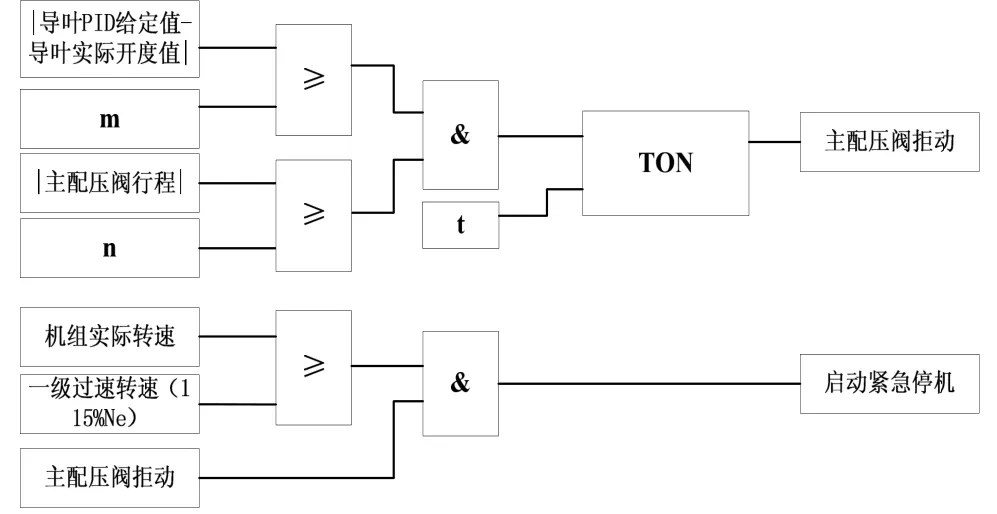
圖2 主配壓閥拒動判定邏輯Fig2 The decision logic of refusing action of main pressure-distribution valve
即當導葉PID給定值與實際值偏差大于m,而主配壓閥行程在時間t內始終大于主配中位偏差 n,則判斷為主配壓閥拒動,其中 m、n、t需通過調速器靜、動態試驗進行實測整定。
4 該方法在華能拉拉山水電站的應用
華能拉拉山水電站位于四川省甘孜藏族自治州巴塘縣境內,電站裝機2×48MW,是川藏聯網工程的一個重要電源支撐點,對川藏聯網工程的安全、穩定、可靠運行起著至關重要的作用。為驗證該方法的科學、可靠性,2014年12月1日,中國電力科學研究院與四川省電力工業調整試驗所及拉拉山水電站工作人員共同對拉拉山水電站 1、2號機組進行了一級過速保護試驗,試驗主要包括靜態試驗和動態試驗兩部分,具體試驗情況如下。
4.1 靜態試驗
本試驗主要是檢驗主配壓閥真實拒動和未拒動時調速器能否可靠發信。
(1)將主配壓閥固定,不讓其位移,通過強制導葉偏差的方法模擬主配壓閥拒動(兩臺機組導葉偏差值m整定為5,主配中位偏差值n整定為3,延時時間t整定為800ms,整定值取決于調速器采樣精度及主配行程綜合誤差),試驗波形見圖3。

圖3 一級過速保護靜態試驗波形圖1Fig3 The first class over-speed protection static test waveform 1
從圖3中可以看出,當導葉偏差從0階躍到4.9%時,沒有發出主配拒動信號,當導葉偏差從0階躍到5.1%時,800ms后調速器發出主配拒動信號。
(2)模擬機組并網,進行轉速(頻率)階躍,模擬機組一級過速,試驗波形見圖4。
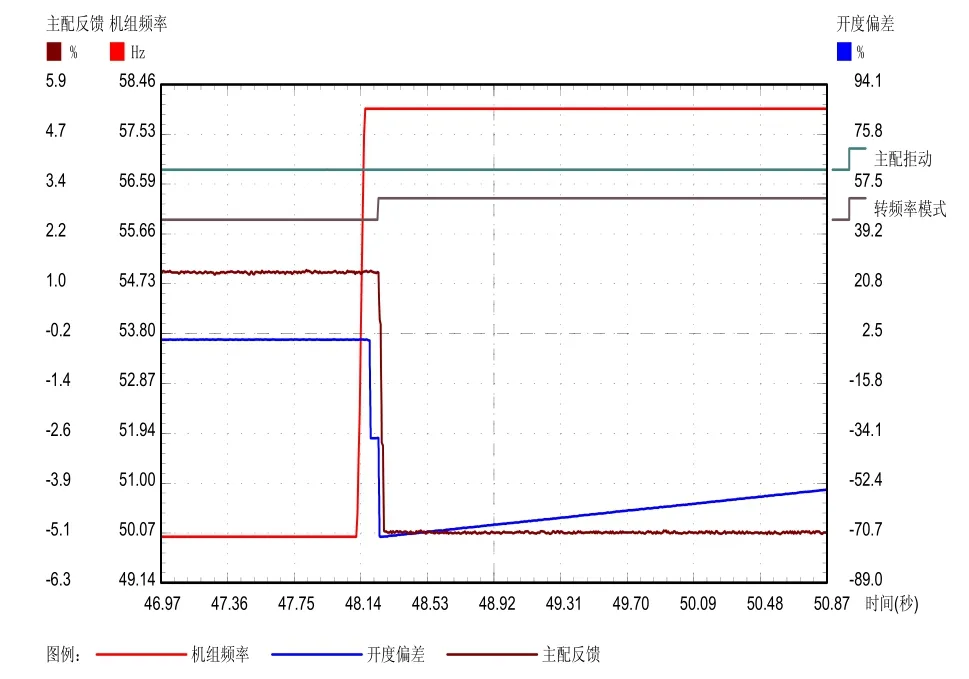
圖4 一級過速保護靜態試驗波形圖2Fig4 The first class over-speed protection static test waveform 2
從圖4中可以看出,在機組一級過速時,主配及導葉動作正確,調速器沒有發出主配壓閥拒動信號。
4.2 動態試驗
本試驗主要是驗證機組在實際一級過速的情況下,該一級過速保護邏輯動作的可靠性。機組各保護正常投入,機組帶 50%負荷,斷開機組出口斷路器,機組甩50%負荷,試驗波形見圖5。

圖5 一級過速保護動態試驗波形圖Fig5 The first class over-speed protection dynamic test waveform
從圖5中可以看出,在機組實際一級過速時(最高轉速已達到120%),主配及導葉正常動作,調速器沒有發出主配壓閥拒動信號,沒有出現保護誤動情況,在故障發生35s左右后機組轉速穩定在額定轉速附近。
5 結束語
水輪發電機組一級過速保護是防止機組過速的第一道保護措施,由于常規主配壓閥拒動信號處理存在的問題,導致機組一級過速保護的實際投入率較低,投入的機組也有誤動的可能,通過本文提出的方法在華能拉拉山水電站取得了較好的應用效果,提高了機組的安全性能,對水輪發電機組一級過速保護功能的優化具有一定推廣應用價值。
[1]魏守平.水輪機控制工程[M].武漢: 華中科技大學出版社, 2009.
[2]陳兵陽, 趙馨, 向家安.水輪機 115%nr過速保護誤動作解決方案[J].水電自動化與大壩監測, 2011, 35(4).
[3]田華, 孫作芳.600MW水輪機組過速保護功能完善探討[J].貴州水力發電, 2010, 24(2).
[4]呂坤.巖灘水電站機組一級、二級過速保護回路改造探析[J].機電信息,2012, (27).
[5]陳流.關于水電站機組一級過速保護優化和改進探討[J].現代制造技術與裝備, 2014, (3).
