從美國新型輔助著艦系統談艦載機著艦
2018-09-18 08:27:30史騰飛丁宏
兵器知識 2018年10期
關鍵詞:系統
史騰飛 丁宏
據美國《海軍航空新聞》雜志報道,2018年3月21-23日期間,美國海軍第23航空打擊測試與評估中隊(VX 23)在“亞伯拉罕·林肯”號航母上成功測試了“精確著艦模式”(Precision Landing Modes,PLM)系統。該系統可大大簡化艦載機著艦的操作難度,顯著提高艦載機的著艦成功率,是重大的技術創新。
“精確著艦模式”系統此前被稱為“魔毯”輔助著艦系統(MAGIC CARPET),是簡化飛行員著艦操控的智能化系統,能使飛行員在著艦最后階段的操控次數由過去數百次降至十余次,著艦精度提升60%。
為深入了解美國新型輔助著艦系統,本文將先簡單科普一下艦載機著艦系統的發展歷程,艦載機著艦過程及著艦主要難點,再詳細介紹美國新型輔助著艦系統。
艦載機著艦系統發展歷程
國外艦載機著艦系統的發展主要經歷了四個階段。
依靠信號燈和人工引導方式的著艦階段
20世紀50年代以前,艦載機全部是螺旋槳飛機,航母甲板為直通式甲板,一般在甲板上設有10~15道阻攔索和3~5道防沖網。在相當長時期內,艦載機著艦主要依靠飛行員個人的駕駛技術,通過阻攔索和防沖網,將艦載機成功停在飛行甲板上。之后通過總結經驗教訓,航母上設立了專門的飛機著艦指揮官(Landing Signal Officer,LSO),一般由經驗豐富的飛行員或經過特殊訓練的軍官擔任。在艦載機著艦過程中,LSO一般站在艦尾左舷位置,通過目視觀察著艦飛機的姿態、尾鉤收放情況等,用人工手勢、彩色信號旗、彩色信號板等明顯的著艦指示信息,向飛行員下達是否允許著艦或者復飛等指令。這種方式適用于早期飛行速度低的艦載機,允許LSO有足夠反應時間的情況。

利用光學助降系統著艦階段
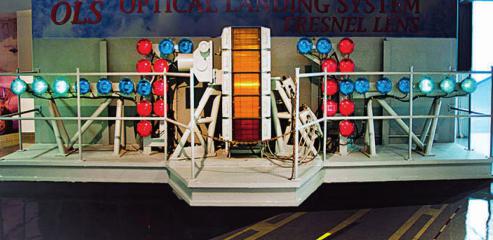
20世紀50年代后期至80年代初,隨著噴氣式艦載機的服役,艦載機著艦速度顯著提高,LSO和飛行員的觀察和判斷時間大幅縮短,艦載機著艦事故率不斷上升。為了解決著艦難題,英國在1952年率先設計出了鏡面光學助降系統(Mirror Optical Landing System,MOLS)。該系統配合資深的LSO,使得航母艦載機著艦事故率大大降低。但該系統使用的鏡面很大,搬運和維護都非常不方便。因此英國又研制了菲涅爾透鏡光學助降系統(Fresnel Lens Optical Landing System,FLOLS),安裝在美國“羅斯福”號航母上。
FLOLS由4組燈光組成,主要是中央豎排的5個分段的燈箱,通過菲涅爾透鏡發出5層光束,光束與降落跑道平行,和海平面保持一定角度。正中段為橙色光束,向上、向下分別轉為黃色和紅色光束,正中段燈箱兩側有水平的綠色基準定光燈。當艦載機高度和下滑角正確時,飛行員可以看到橙色光柱正處于綠色基準燈的中央,保持此角度就可以準確下滑著艦,并鉤住阻攔索,完成降落。如飛行員看到的是黃色光柱且處于綠色基準燈之上,就要降低高度;如看到紅色光柱且處于綠色基準燈之下,說明飛機飛得太低,需要馬上升高,否則會撞在航母尾部。相比于MOLS,FLOLS為飛行員提供了更清楚、更豐富的信號,降低了艦載機著艦風險。但FLOLS作用距離有限,良好天氣條件下可在1.8千米處向飛行員提供著艦信息,在雨霧天氣下的應用效果則不理想。因此美國在上世紀90年代研發了激光助降系統(Laser Landing Systems,LLS)。

LLS與FLOLS原理相同,但利用激光良好的穿透性和直線性,同時將透鏡燈箱由5個增加到10個,飛行員不僅可以在18千米外捕獲甲板中線和正確下滑路線,還有充裕的時間調整進場的下滑位置和姿態。即使在濃霧和低空中,飛行員也可在5千米以外捕獲著艦信息。激光助降系統從20世紀90年代末研制成功,一直在美國海軍航母上使用。它在不依靠無線電或雷達時的可用性達到了99%,是電磁管制時輔助艦載機著艦的重要裝置之一。

由于光學引導技術具有抗電磁干擾等特性,光學助降系統仍是艦載機著艦系統中最傳統且具生命力的引導裝備,迄今為止仍在使用并不斷改進和發展。美國海軍新型航母“福特”級仍然裝備了改進型FLOLS系統。
利用全天候自動著艦系統著艦階段

待機階段
當艦載機距離航母100千米左右時,正好進入到空中管制雷達的作用范圍。空中管制雷達首先會對艦載機進行敵我識別與機型識別。與此同時,航母空中交通管制中心開始參與并接管著艦流程。其中著艦指揮官負責引導艦載機進行集結、監視相關空域,并根據艦載機的狀態(如出現故障需要優先降落、燃油不足需要空中加油等)規劃著艦順序與精確的著艦航線,提供航管與氣象等保障信息。在這一階段,各類不同的艦載機都有著不同的航線,飛行高度也不同:F/A-18戰斗攻擊機是600米;EA-6B電子戰飛機是900米;E-2C預警機是1 200米,各種艦載機保持著安全的高度差,一旦著艦指揮官下達了著艦許可,艦載機將開始進場階段。

進場階段
當飛行員取得著艦許可時,便可脫離待機航線進入進場階段,之后艦載機進入航母后方10千米的位置開始減速進場。在這個階段,艦載機需要關閉武器系統,確認飛機的重量是否符合航母著艦的標準,然后打開減速板、放下攔阻鉤及起落架等,并根據天氣及飛行員目視條件確定自動著艦的模式。
下滑階段
飛行員和著艦指揮官根據當時的天氣狀況和飛行員的目視條件選擇著艦控制模式,著艦控制模式分為全自動、半自動、人工三種。全自動模式下不需要飛行員對艦載機進行干預控制,完全根據精密進場控制雷達所提供的高精度跟蹤信息通過艦機數據鏈控制艦載機完成最后的下滑航線直至艦載機安全著艦為止(著艦失敗則拉起復飛)。半自動模式下,艦載機飛行員根據顯示器或儀表上由精密進場控制雷達提供的信息操控飛機進行降落。人工模式下,飛行員只能與著艦指揮官語音通話,對相對誤差進行修正進入下滑航線,直到飛行員可以目視觀察到菲涅爾光學助降系統所顯示的燈光信號為止。
攔阻或復飛階段
通過精密進場雷達和在光學助降系統的指示下完成最后的下滑流程,直至艦載機尾鉤安全掛住阻攔索降落在航母甲板上,如果降落出現失誤,飛行員則重新拉起艦載機,進入復飛階段。需要特別說明的是,在著艦的過程中,艦載機飛行員必須大油門下滑著艦,以保持可以復飛的速度。
由此可見,艦載機著艦過程十分復雜,而且非常危險,稍有不慎,就會機毀人亡。根據國外媒體統計,艦載機起飛、著艦階段是事故率最高的階段,起飛、著艦階段時間僅占艦載機執行任務時間的4%,而事故率卻占60%以上。同時,我國艦載機首飛第一人戴明盟在清華大學演講時曾說:“每一個飛行員都明白,艦載機可不是隨便就能玩得起的。航母艦載機飛行員的風險系數是航天員的5倍、普通飛行員的20倍。美國剛剛發展航母時,平均每2天摔1架飛機,犧牲了1 000多名飛行員。”接下來,結合艦載機著艦過程,我們分析一下艦載機著艦都有哪些難點。
第一,著艦的甲板空間有限。一般供殲擊機、攻擊機和輕型轟炸機使用的陸地機場跑道長2 000~2 400米,而航母降落甲板長度220~270米,僅為陸基飛機起降跑道的十分之一。在如此短的距離內,艦載機需要高速降落到甲板上并成功將尾鉤掛上阻攔索;若著艦攔停失敗,艦載機還必須能夠在有限甲板長度內加速,實現安全逃逸復飛。
第二,艦載機著艦過程中,周圍環境情況十分復雜。首先是為了改善艦載機著陸性能,獲得較大的甲板風,航母往往需要頂風航行。而航母在頂風航行過程中,將在其上空以及后方形成特殊的流場分布,尤其是艦載機著艦階段處于著艦飛行狀態時,這些特殊的流場會對艦載機著艦產生嚴重干擾。其次,由于海浪等環境的影響,航母必然存在縱、橫搖和升、沉運動,嚴重影響下滑道的穩定性,給艦載機著艦帶來嚴重影響。
第三,艦載機最后的著艦時間短短數秒,對艦載機和飛行員本身考驗巨大。首先,對于艦載機來說,在短距離內迅速的減速制動,會導致艦載機在此過程中需要承受巨大的載荷,例如飛機著艦瞬間的沖擊載荷、阻攔索強制制動載荷等,這就要求艦載機起落架及其密切相關的結構都需要進行加強處理,以保障艦載機的安全。其次,對于飛行員來說,頂風穿云駕駛艦載機降落到搖擺不定的狹小移動甲板上,無疑是非常冒險的,這對于飛行員的身體極限、飛行技術、意志品質和心理素質都是極端考驗。在抵近航母的過程中,飛行員需要根據實際情況不斷調整飛行姿態,不斷觀察、控制飛行軌跡,保證準確進入著艦航線,在著艦瞬間更要完成收腹、收腿、繃緊肌肉等動作,否則強大的過載可能會導致飛行員脫臼、暈厥或短時失明等損害。
“魔毯”輔助著艦系統
根據上述介紹,我們知道艦載機著艦困難重重,尤其是在著艦的最后階段,飛行員需要操控數百次來調整艦載機飛行姿態,以保障艦載機安全著艦,這對于飛行員來說是極大的負擔。因此,為解決艦載機最后著艦階段手動操控頻繁的問題,美國海軍航空系統司令部和海軍研究局于2011年啟動了“魔毯”輔助著艦系統的研發任務。
發展歷程
2012年底,美國海軍利用兩種不同飛機模擬器對該系統進行了演示驗證,確認該系統可大幅降低著艦難度。
2015年4月,美海軍第23航空打擊測試與評估中隊(VX 23)在“喬治·布什”號航母(CVN 77)上首次測試了“魔毯”輔助著艦系統的初始版本軟件。VX 23使用F/A-18“超級大黃蜂”戰斗機進行了180次觸艦復飛和16次阻攔著艦,積累了各種風況下“魔毯”輔助著艦系統的測試數據。測試結果顯示,和當前其它著艦輔助系統相比,“魔毯”著艦失敗率降低了50%以上。由于在測試中的完美表現,美海軍決定加速“魔毯”輔助著艦系統的研發進度。
2016年6月,美海軍第23航空打擊測試與評估中隊又在“喬治·華盛頓”號航母(CVN 73)上對“魔毯”輔助著艦系統進行了測試,在598次測試中,只有一次脫鉤情況發生,飛行員們對“魔毯”輔助著艦系統非常滿意。測試結束后,美國海軍航空系統司令部和海軍研究局發布了階段性系統軟件。
兩次測試數據表明,66%著艦點位于目標點前后5米范圍內,與目前66%著艦點位于目標點前后12米范圍相比,精度提高60%,極大提高了著艦成功率;飛行員在著艦最后18秒內,初次使用該系統進行了20次手動操控,后續僅需10余次手動操作,極大地降低了飛行員在著艦最后階段對油門、操縱桿的操控頻次及難度。
2017年1月,“魔毯”輔助著艦系統更名為“精確著艦模式” (PLM)系統,并正式部署到“喬治·布什”號和“卡爾·文森”號(CVN 70)航母上。“喬治·布什”號航母第8艦載機聯隊指揮官詹姆士·邁考爾上校稱,PLM系統的一個重大改進是,對艦載機靠近航母時的功率調節進行了優化。通過PLM系統,F/A-18“超級大黃蜂”戰斗機或E/A-18“咆哮者”電子戰飛機在下降時將使用其襟翼來控制下降速率,從而實現更平穩的油門速度和更少的手動修正。2017年4月,美國海軍航空兵司令舒梅科中將向其他海軍航空兵指揮官群發郵件,推介了該系統的巨大優勢和使用經驗。

“魔毯”輔助著艦系統構成
PLM系統主要由智能化飛控系統和飛行員頭盔組成。智能化飛控系統采用了全新的控制算法與規則,通過軟件方式解耦偏航、俯仰、滾動等各項參數,具有自動控制動力、自動維持姿態穩定、自動計算參考下滑航路及其與實際航路之間誤差矢量等功能,使飛行員只需專注于控制飛機的飛行路徑。飛行員頭盔與智能化飛控系統相連接,用于顯示艦載機著艦過程中智能化飛控系統計算的數據和信息,供飛行員操控參考。
簡單來說,PLM系統是以智能化算法計算出各種最合適的降落因素,綜合判斷飛機的高度、航速、風速、進場的角度等,然后導引飛行員執行它所建議的降落程序,大幅減輕了飛行員的負擔與心理壓力。但該系統還存在不足之處,即缺乏對故障安全的完全冗余設計,因此在出現油門控制系統和導航系統失效、機翼損傷等故障情況下,飛行員需要根據一定的基準來決定是否采用應急預案。因此,PLM系統還只是一種輔助著艦系統,并非自動著艦系統,最終還是需要由飛行員來控制飛機,人為失誤和惡劣天氣條件仍然可能給艦載機著艦造成危險。
根據實際應用情況,PLM系統取得了良好的使用效果,美海軍艦載機飛行員對該系統普遍持歡迎態度,認為在保持駕駛樂趣的同時,明顯降低了操作難度,提高了著艦精度。舒梅科中將曾表態稱美海軍計劃在2019年將該系統全面推廣到海軍F/A-18“超級大黃蜂”和E/A-18“咆哮者”飛行中隊。除F/A-18和E/A-18飛機之外,美海軍F-35C“閃電”II型聯合戰斗機也將采用PLM系統輔助著艦。

據悉,PLM系統的升級版本將增加“失效模式”,即便是油門控制損壞,或者導航系統失效,抑或機翼被擊中,都能在艦載機著艦時保證其安全,預計在2018年進行測試,2019年交付使用。


“魔毯”輔助著艦系統作用
PLM輔助著艦系統的研發和應用將給美國海軍航母戰斗群帶來重要影響。一是可顯著提高艦載機的著艦成功率,艦載機著艦是艦載機操作全過程中最復雜、最危險的階段之一,PLM系統的應用將極大提高艦載機著艦最后階段的自動化水平,降低忙中出錯的危險;二是PLM輔助著艦系統可大幅降低艦載機著艦操控難度,飛行員可通過較少的手動操作即可完成著艦,因此艦載機飛行員的訓練強度和成本也可隨之降低;三是可提高艦載機及航母相關設施的耐用性,著艦精準度的顯著提高,將改善著艦過程中對阻攔索、飛行甲板及艦載機的沖擊狀況。簡而言之,PLM系統可直接影響艦載機出動架次率,提升航母作戰能力。
結語
為滿足未來作戰的需求,各海軍強國在升級傳統的光學和雷達著艦引導系統的發展同時,必定會十分重視研制新型智能化著艦引導系統。例如,美國正在以全球衛星導航系統(GPS)基礎,研制能夠對無人機進行進場控制與著艦引導的的聯合精確進場著艦系統(JPALS),以及能減少飛行員手動操作的精確著艦模式(PLM)系統等。雖然目前美軍已經成功完成X-47B無人機的阻攔著艦,但是其背后仍需要大量的人員指揮才能完成。因此,隨著科技的不斷發展,不論是艦載有人機還是艦載無人機,研制全自動著艦系統將是未來各海軍強國的主要發展方向。



猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32