一階慣性大時滯系統Smith預估自抗擾控制
2018-09-19 01:04:50王永帥陳增強孫明瑋孫青林
智能系統學報 2018年4期
關鍵詞:系統
王永帥,陳增強,2,孫明瑋,孫青林
(1. 南開大學 計算機與控制工程學院,天津 300350; 2. 天津市智能機器人重點實驗室,天津 300350)
時滯系統廣泛存在于現代過程控制工業中,例如冶金、化工、煉油等工業。一般認為純遲延時間與過程的時間常數T之比大于0.3則說明該過程是具有大遲延的工藝過程。滯后時間越大,系統越難控,而且對控制品質極為不利,因此,大時滯系統受到了理論和應用領域的廣泛關注。O.J.M.Smith[1]于1957年提出了著名的針對純滯后系統的Smith預估器[2-3],有效解決了控制量不能及時作用于被控對象的問題。但是,Smith預估器不具備任何抑制擾動的能力,當存在外界干擾時,控制性能將會大大下降。由此出現了自適應控制[4-5]、預測控制算法[6-7]、魯棒控制算法[8]和各種智能算法等[9-10]。但是只能解決時滯時間較小的控制問題。
20世紀80年代末,韓京清研究員提出了自抗擾技術,由于能夠實時估計和補償擾動,受到了控制領域的廣泛關注,并成功應用于各種不確定系統。針對時滯系統,韓京清[11]研究員提出了無視時滯法、一階慣性環節近似法、輸入預測法和輸出預測4種方法,但是隨著時滯增大控制效果變差。由于自抗擾技術的各種實用優點和需調參數太多等原因,美國克利夫蘭州立大學的高志強教授[12]提出了線性自抗擾方法,大大簡化了調參工作量,而且線性自抗擾的分析相對容易,現在已經有很多文獻對此進行了理論分析[13-16]。
因此,將具有實時估計補償擾動能力的線性自抗擾技術與解決純時滯問題的Smith預估器相結合,來解決大時滯系統的控制問題。已有學者進行了一些相關研究,文獻[17]在模型大約已知的條件下,將ADRC-Smith與基于時滯的擾動補償觀測器、PI-Smith在魯棒性能和抗擾能力方面進行了比較,并進行頻域分析,說明了ADRC-Smith控制性能更好,并對化學反應器濃度控制進行了仿真測試,對鍋爐的氧濃度控制進行了仿真測試和實際結果的對比;文獻[18]分析了ADRC-Smith的性能,并通過改進差分算法整定控制參數,最后與ADRC、PI-Smith、PI 3種控制器進行仿真比較。
在上述基礎上,本文研究了在被控對象準確已知和大約已知兩種情況下,LADRC-Smith控制方法的穩定條件和Smith預估器參數選擇問題,通過MATLAB仿真進行了驗證,并仿真分析了參數攝動對系統各個性能指標的影響。
1 線性自抗擾的基本原理
線性自抗擾以線性擴張狀態觀測器(linear extended state observer,LESO)為核心,包含了狀態和擾動估計、誤差反饋和擾動補償幾部分,結構如圖1所示。
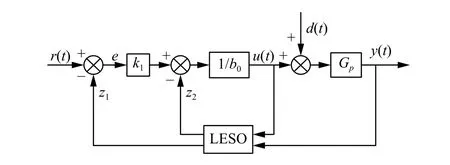
圖 1 一階系統線性自抗擾控制結構Fig. 1 Diagram of LADRC for first-order systems
下面以一階系統為例,假定不含時滯的一階被控對象用微分方程表示為

式(1)所描述系統的狀態方程為

根據式(2)設計的線性擴張狀態觀測器為



2 大時滯系統的LADRC-Smith設計
通常,一階大時滯被控對象的數學模型為



Smith 預估器原理結構圖如圖2所示。
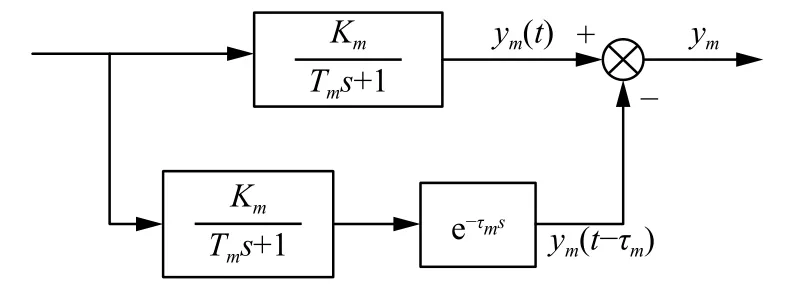
圖 2 Smith預估器結構Fig. 2 Diagram of Smith predictor
這樣,當Smith預估器參數與被控對象相同時,進入LESO的被控輸出,和在時間上同步,從而得到一階系統的整個LADRC-Smith結構圖如圖3所示。
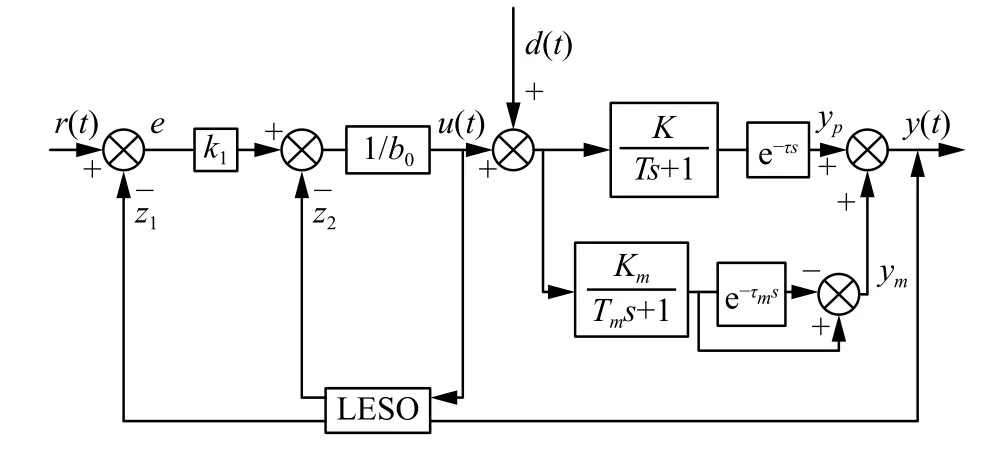
圖 3 LADRC-Smith系統結構Fig. 3 Diagram of the LADRC-Smith system
3 穩定性分析
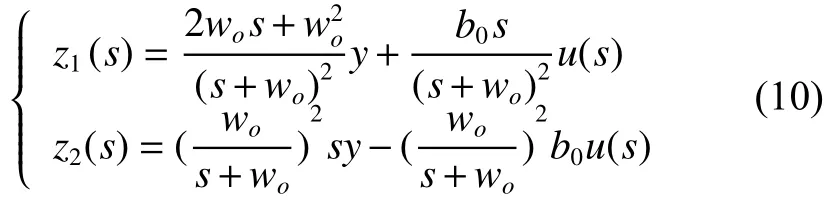
根據式(3)和式(5),可以得到表達式:

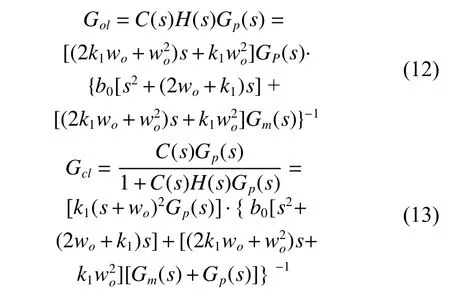
結合狀態誤差反饋控制率式(4),可以得到系統的典型單回路反饋控制結構框圖如圖4。
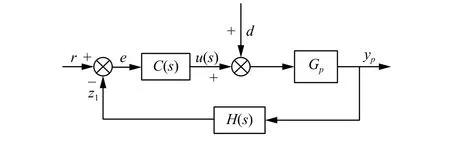
圖 4 LADRC-Smith單回路結構Fig. 4 The single loop diagram of LADRC-Smith
其中:
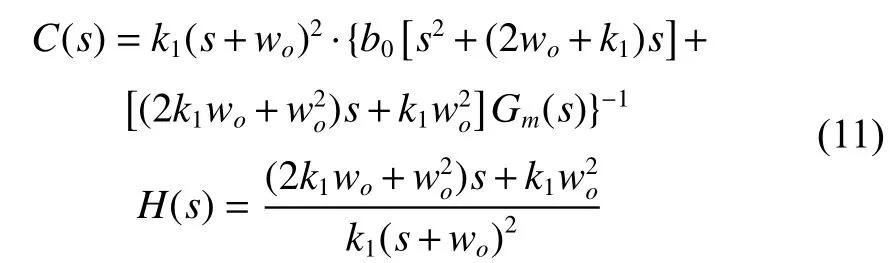
從而可以得到系統的開環和閉環傳遞函數:
3.1 條件分析
下面從被控對象模型準確已知和大約已知兩個方面分析LADRC-Smith的條件穩定性。
3.1.1 被控模型準確已知
命題1 當被控對象模型準確已知時,Smith預估器與被控模型參數完全相同,只要3個控制參數為正,系統輸出是穩定的。
證明
只有分子中包含時滯,不會影響系統的最終穩定性,因此可以利用勞斯判據對系統特征方程進行穩定性分析[19]。

證畢。
3.1.2 被控模型大約已知
假設:

證明
閉環特征方程為
對被控系統特性進行仿真發現,針對大慣性環節 ,當時間常數T攝動較小時(即),和輸出非常接近;當較小時,可以進行Taylor展開,但對于大時滯對象,Taylor展開不適用,而Pade近似更精確。所以,為了能夠定性分析,作如下近似:

從而,式(16)可以轉化為

式中
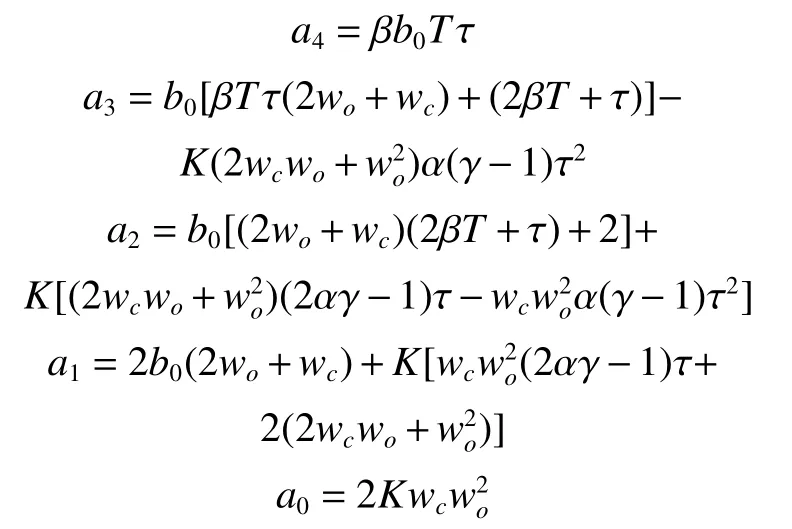
根據勞斯判據,定性得到了一個近似的穩定充分條件:
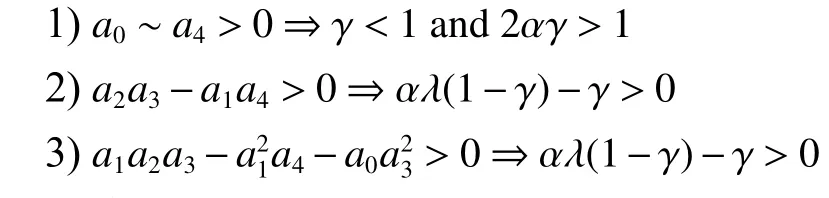
證畢。
3.2 仿真驗證
3.2.1 Smith預估器參數與被控對象相同
由圖5可以看出,當Smith預估器的參數與被控對象完全相同時,只要3個被調參數為正,系統輸出最終是穩定的,但是動態過程跟參數選擇十分密切,參數調節與性能關系將在下面討論。
3.2.2 Smith預估器參數與被控對象不同
當Smith預估器參數與被控對象參數不相同時,按照命題2的近似充分條件選擇Smith預估器參數,控制參數隨意給定,然后進行仿真驗證,如圖6所示。
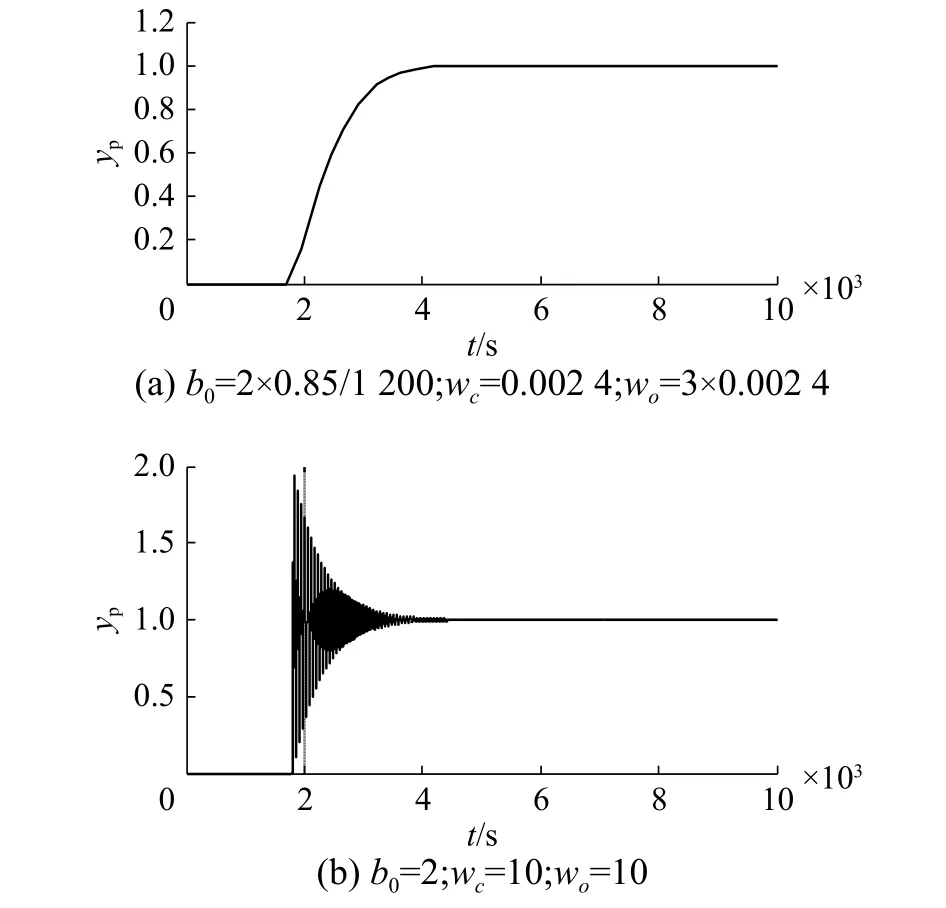
圖 5 被控對象準確已知時的階躍響應Fig. 5 Step response when plant is accurately known
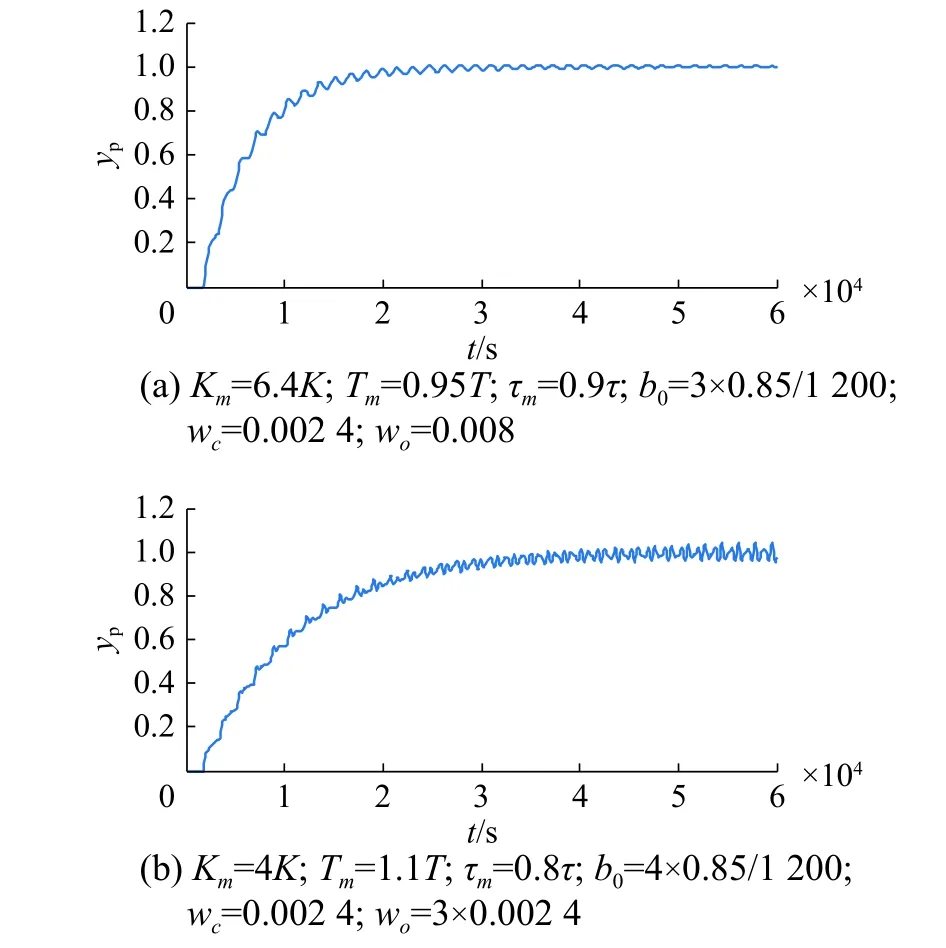
圖 6 被控對象大約已知時的階躍響應Fig. 6 Step response when plant is approximately known
可以看出,當Smith預估器參數與被控對象不相同時,根據命題2選擇參數,由于是近似條件,系統最終可能不穩定,與控制參數選擇也相關,所以,命題2有一定的局限性,但也有一定的參考意義,控制參數與性能的關系將在下面分析。
4 參數分析與設計原則
4.1 系統參數
Smith預估器參數為

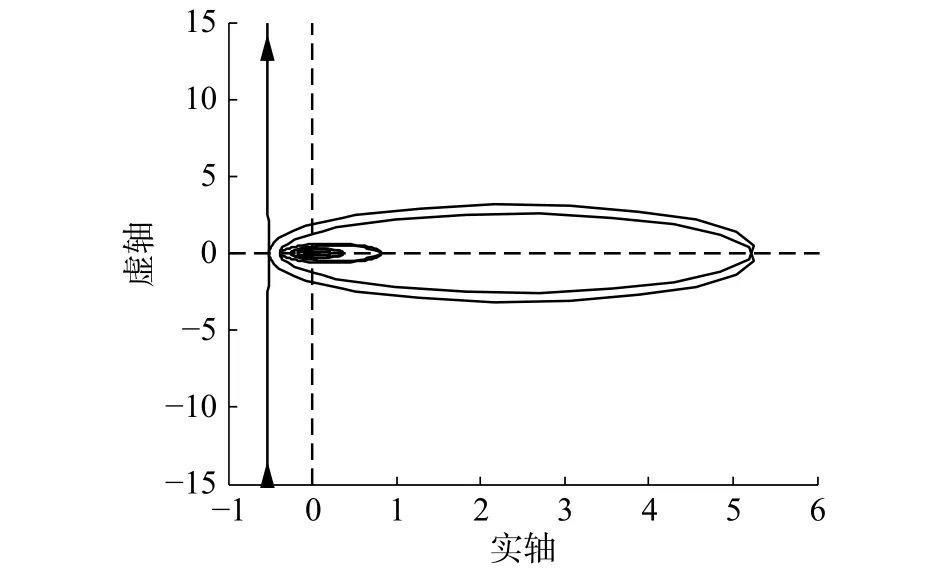
圖 7 LADRC-Smith奈氏曲線圖Fig. 7 Nyquist diagram of LADRC-Smith
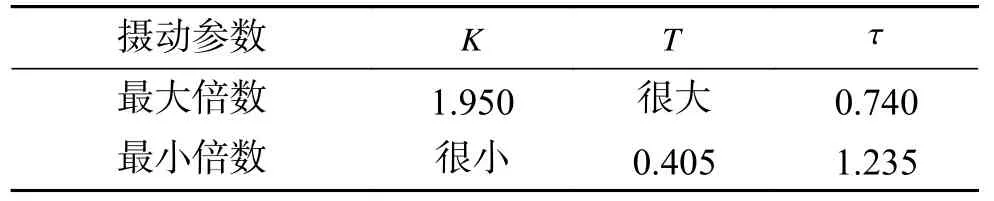
表 1 被控對象參數攝動的穩定邊界值Table 1 Stable boundary when parameters perturbation
4.1.1 K變化對系統的影響
如表2和圖8可以看出:
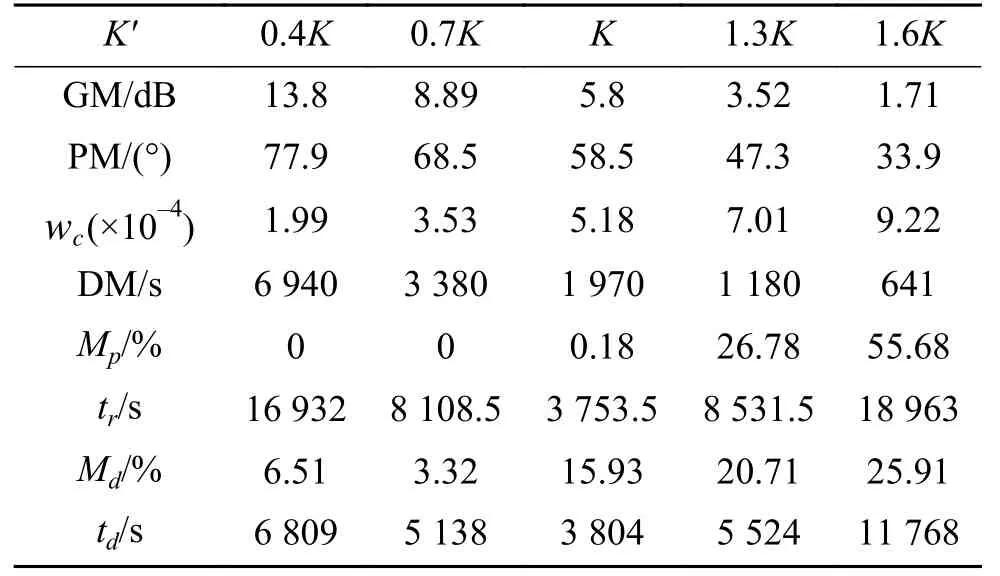
表 2 K變化的性能指標Table 2 Performance index when K changes
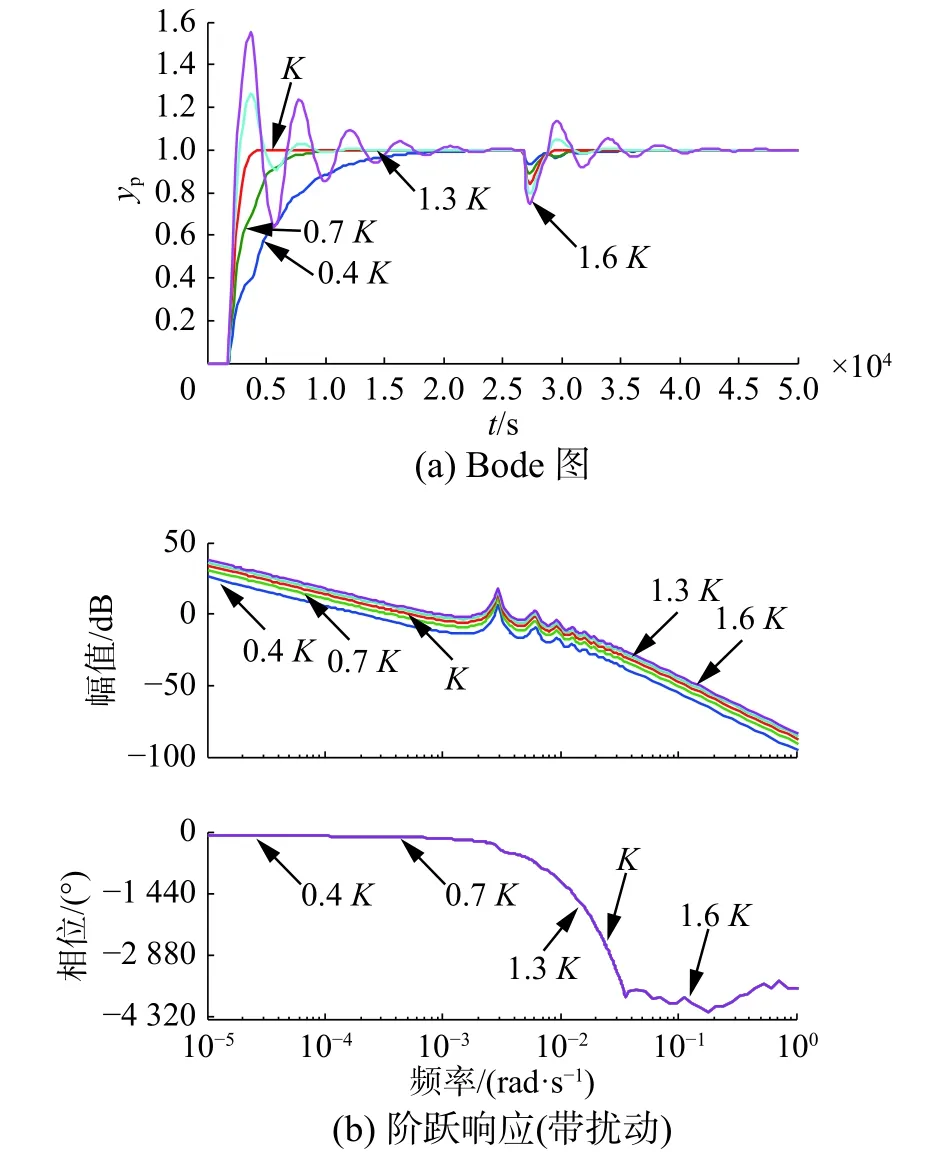
圖 8 K變化的階躍響應(帶擾動)和Bode圖Fig. 8 Step response with disturbance and Bode diagram for K
如表3和圖9可以看出:
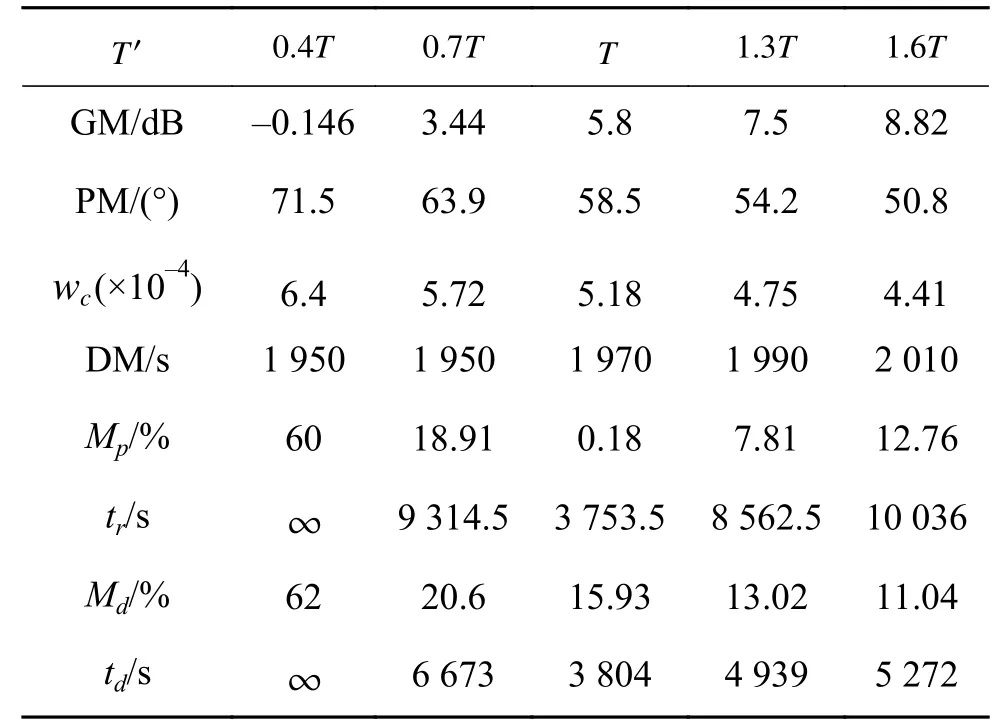
表 3 T變化的性能指標Table 3 Performance index when T changes
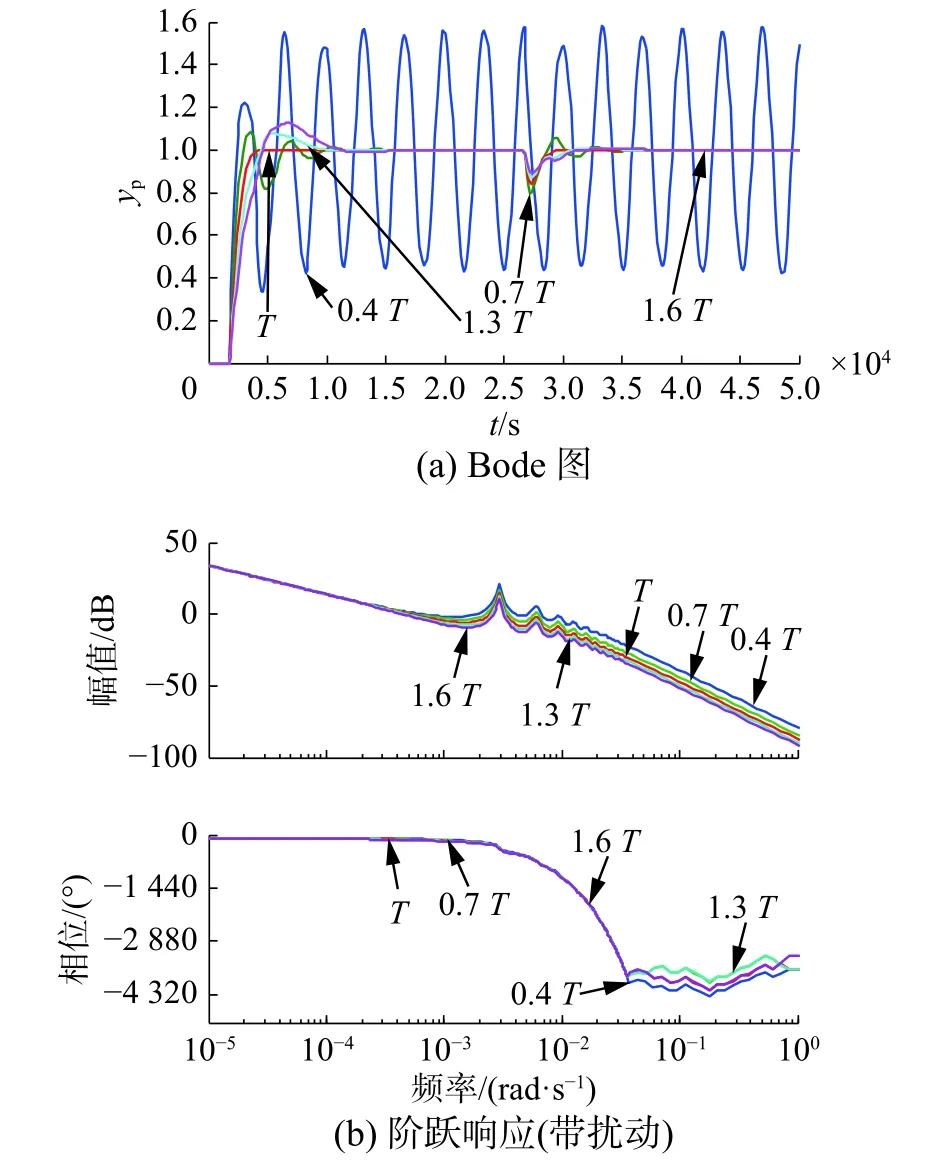
圖 9 變化的階躍響應(帶擾動)和Bode圖Fig. 9 Step response with disturbance and Bode diagram for
如表4和圖10可以看出:
表 4 變化的性能指標Table 4 Performance index when changes

表 4 變化的性能指標Table 4 Performance index when changes
GM/dB 3.28 5.44 5.8 5.53 5.02 PM/(°) 69.2 63.8 58.5 53.1 47.8 (×10–4) 5.18 5.18 5.18 5.18 5.18 DM/s 2 330 2 150 1 970 1 790 1 610 Mp/% 29.53 15.04 0.18 14.73 29.13 tr/s 19 982 7 388.5 3 753.5 7 388.5 26 320 Md/% 15.94 15.93 15.93 15.93 16.68 td/s 14 362 5 595 3 804 5 679 21 525
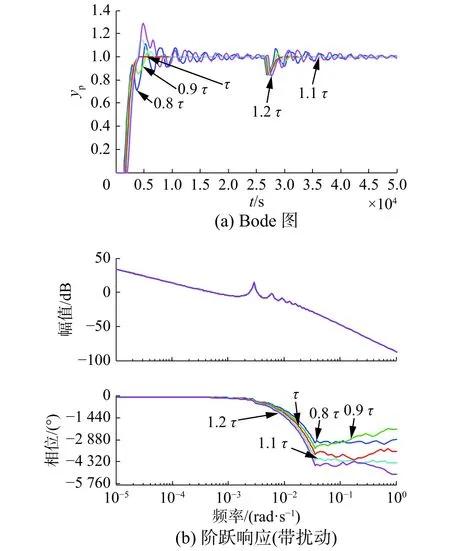
圖 10 變化的階躍響應(帶擾動)和Bode圖Fig. 10 Step response with disturbance and Bode diagram for
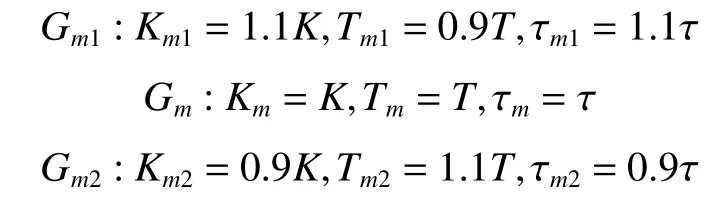
下面進行驗證,對如上同一被控對象,選擇同一控制參數設計3個Smith預估器、和:
進行時域和頻域分析,如圖11所示。
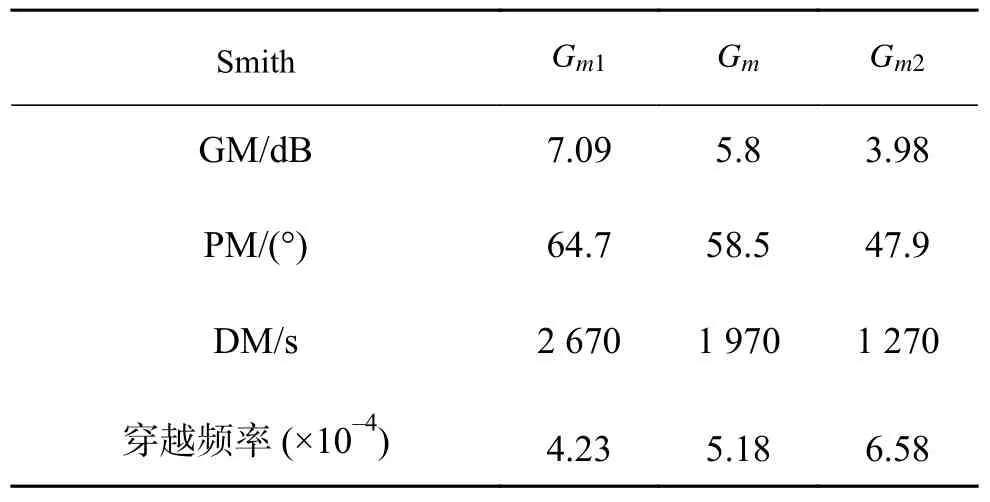
表 5 不同Smith預估器的性能指標Table 5 Performance index for different Smith predictors
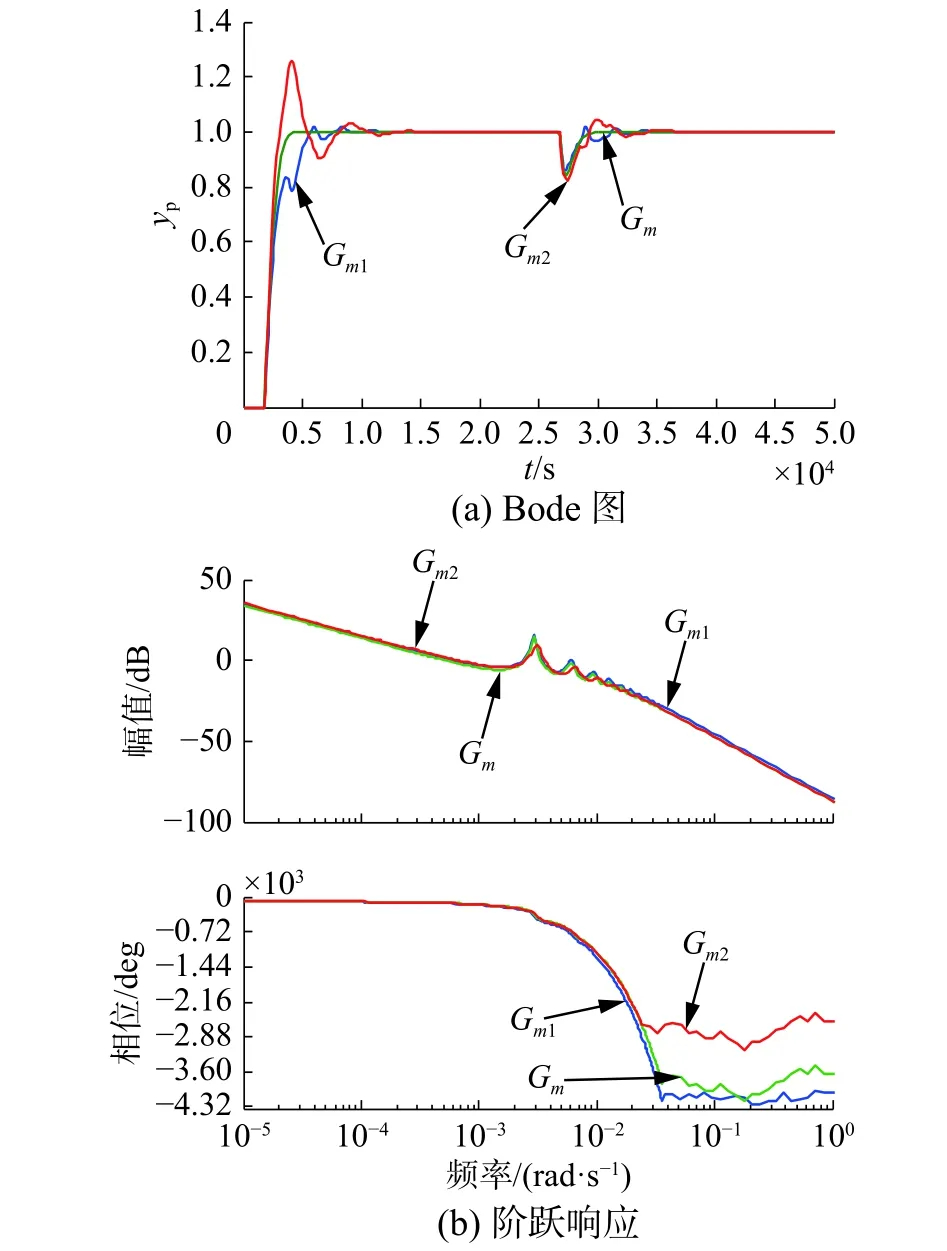
圖 11 不同預估器的階躍響應和Bode圖Fig. 11 Step response and Bode diagram for different predictors
4.2 控制參數
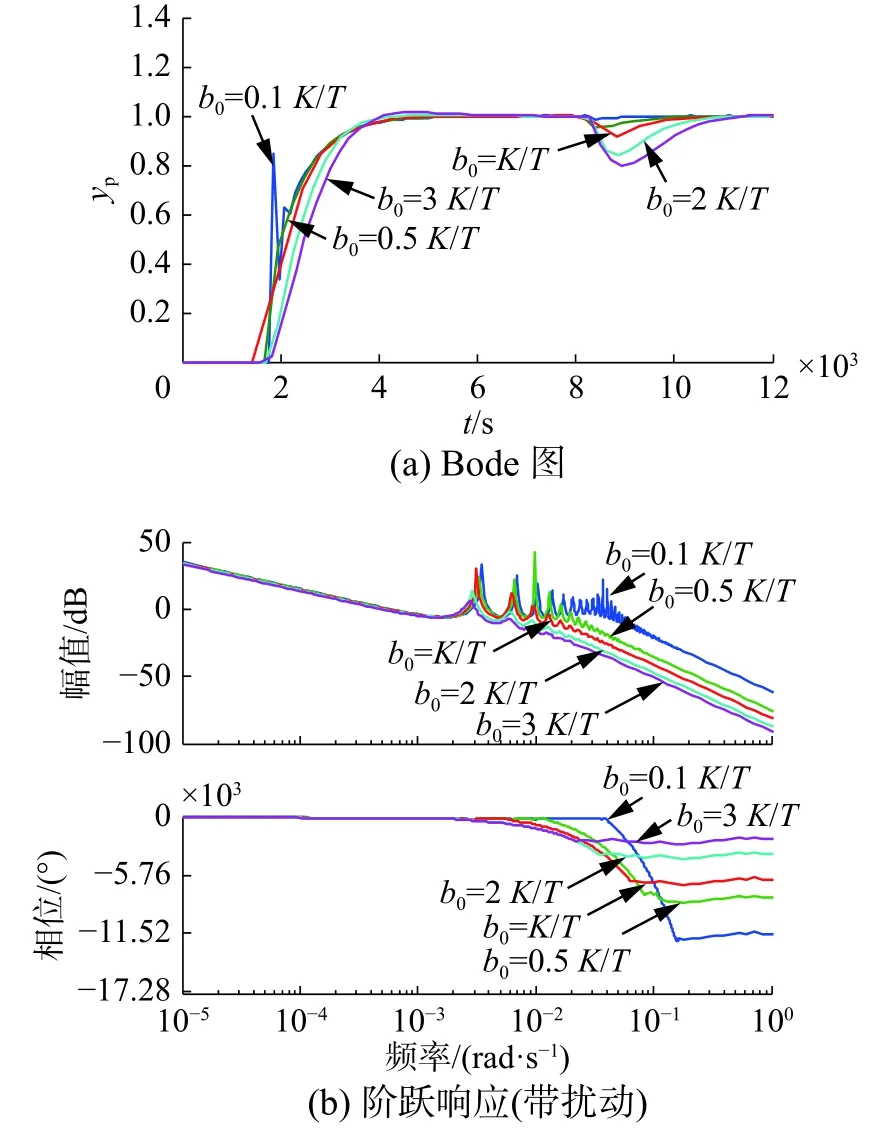
圖 12 變化的階躍響應(帶擾動)和Bode圖Fig. 12 Step response with disturbance and Bode diagram for
表 6 變化的性能指標Table 6 Performance index when changes
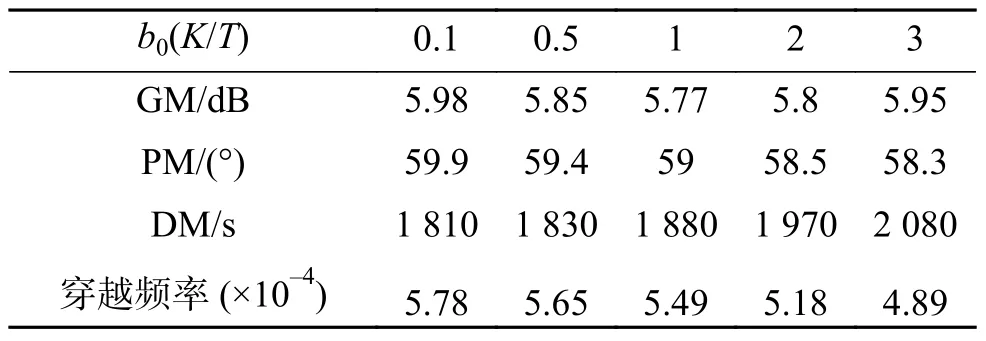
表 6 變化的性能指標Table 6 Performance index when changes
b0(K/T) 0.1 0.5 1 2 3 GM/dB 5.98 5.85 5.77 5.8 5.95 PM/(°) 59.9 59.4 59 58.5 58.3 DM/s 1 810 1 830 1 880 1 970 2 080穿越頻率 (×10–4) 5.78 5.65 5.49 5.18 4.89
1) 系統響應變慢,振蕩消失,出現了超調;
2) 當擾動出現時,擾動偏離量和擾動恢復時間增加,抗擾性能變弱;
3) 增益裕度先減小后增加,相角裕度減小,時滯裕度增加,穿越頻率減小。
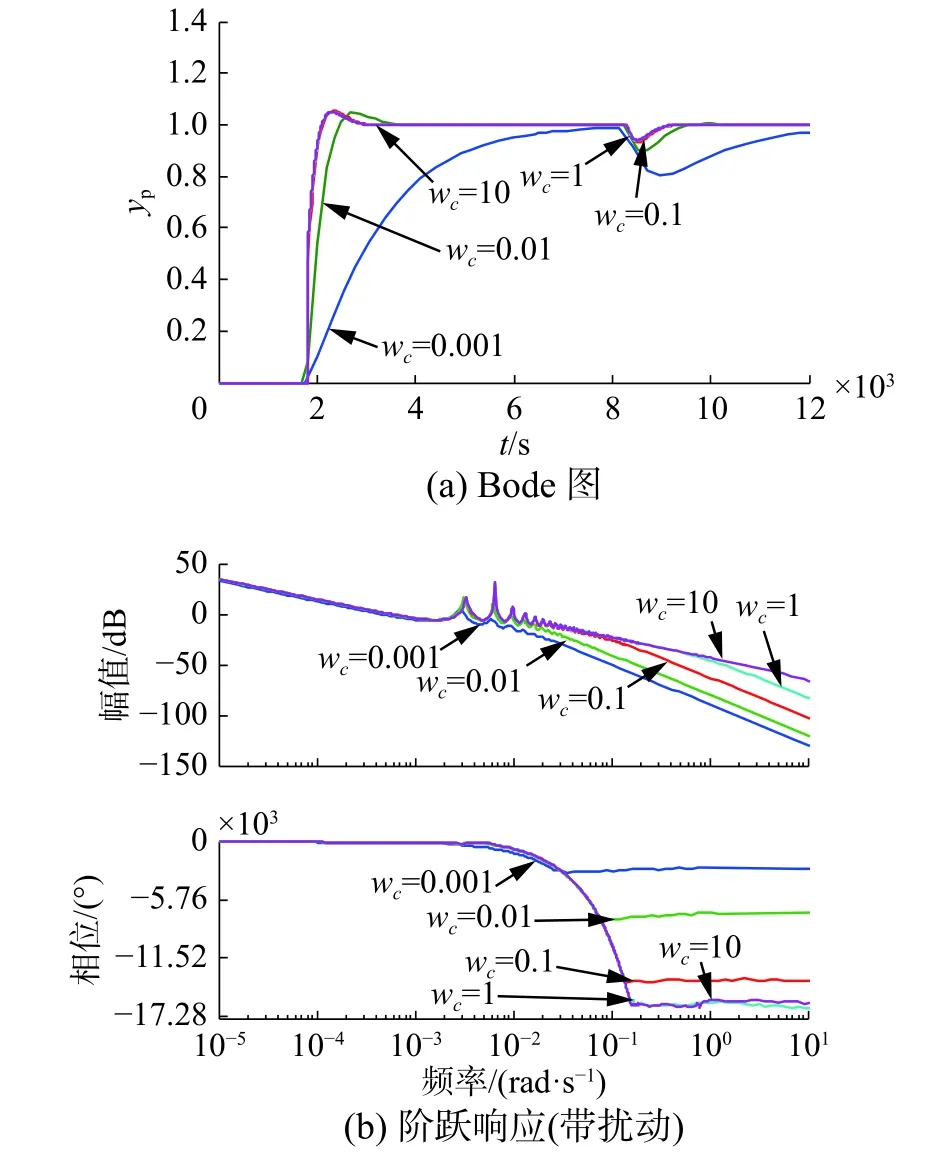
圖 13 變化的階躍響應(帶擾動)和Bode圖Fig. 13 Step response with disturbance and Bode diagram for
表 7 變化的性能指標Table 7 Performance index when changes
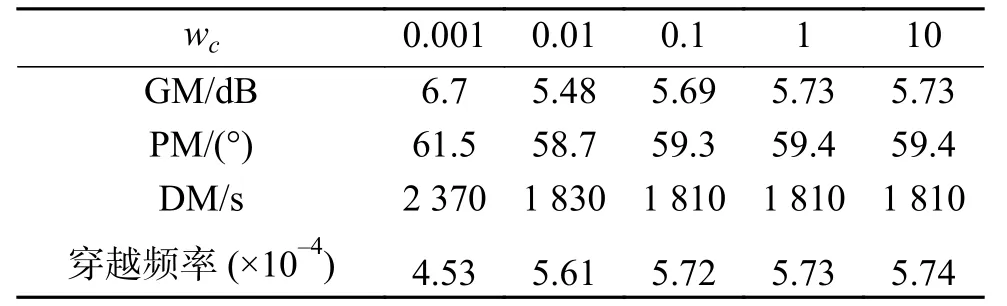
表 7 變化的性能指標Table 7 Performance index when changes
wc 0.001 0.01 0.1 1 10 GM/dB 6.7 5.48 5.69 5.73 5.73 PM/(°) 61.5 58.7 59.3 59.4 59.4 DM/s 2 370 1 830 1 810 1 810 1 810穿越頻率 (×10–4) 4.53 5.61 5.72 5.73 5.74
可以看出:隨著控制器帶寬增加,1) 系統響應變快,出現了超調;2) 抗擾性能增強,擾動偏離量和擾動恢復時間減小;3) 增益裕度和相角裕度先減小后增加,時滯裕度減小,穿越頻率增加。
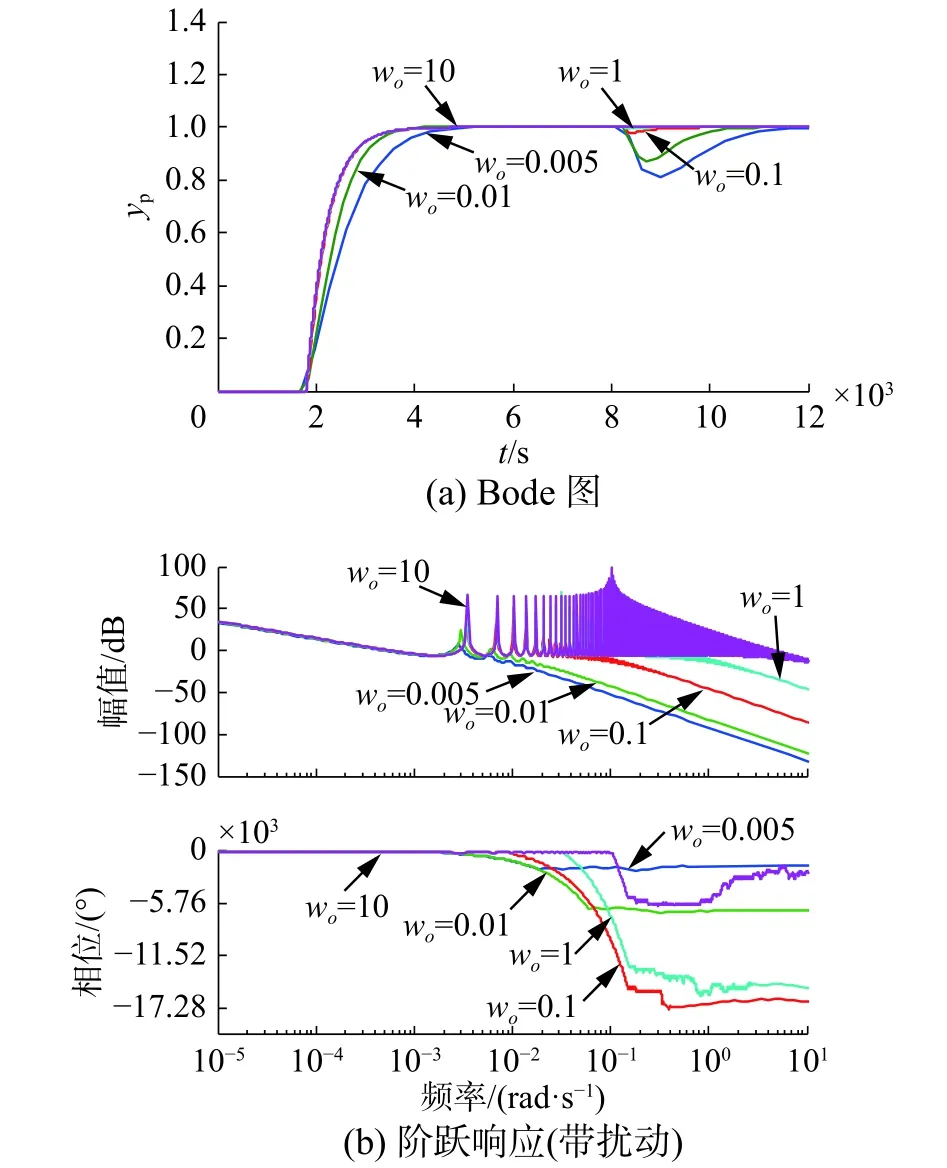
圖 14 變化的階躍響應(帶擾動)和Bode圖Fig. 14 Step response with disturbance and Bode diagram for
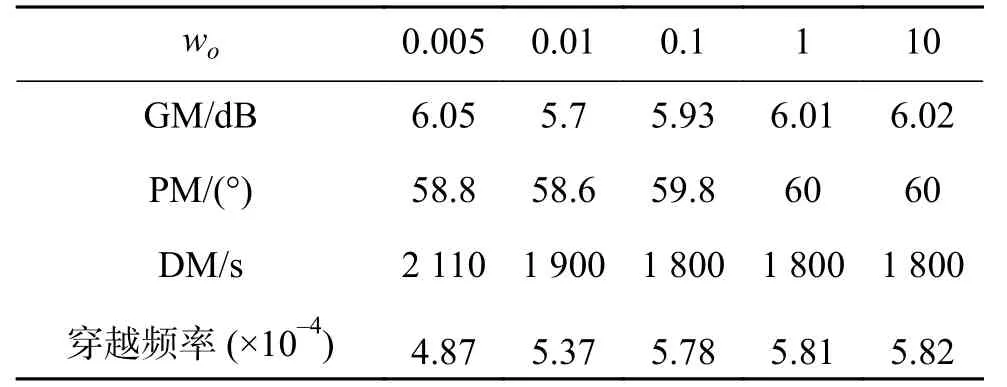
表 8 wo變化的性能指標Table 8 Performance index when wo changes
可以看出:隨著觀測器帶寬增加
1) 系統響應變快,調節時間變短;
2) 抗擾性能增強,擾動偏離量和擾動恢復時間減小;
3) 增益裕度和相角裕度先減小后增加,時滯裕度減小,穿越頻率增加。
綜上,可以得到如下控制參數調節規則:
5 結束語
本文針對大時滯系統,研究了基于Smith預估器的線性自抗擾控制的穩定條件,通過MATLAB仿真進行驗證,并分析了系統參數和控制參數對系統的影響,得出以下結論:
1) 當被控對象準確已知,Smith預估器參數與被控對象相同時,系統是穩定的。當被控對象大約已知時,根據穩定的近似充分條件選擇Smith預估器參數進行設計,根據性能需要適當調節參數,系統更易穩定。
3) 本文分析建立在被控對象大約已知的基礎上,限制了實際應用,而且Smith預估器參數與被控對象不同時的近似充分條件并不能保證系統一定穩定,有一定局限性。所以對模型未知情況下的系統控制和穩定性證明需要進一步探索。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32