中國象棋機器人棋子定位與識別方法
2018-09-19 01:04:56郭曉峰王耀南周顯恩尹阿婷趙輝平劉磊
智能系統學報 2018年4期
郭曉峰,王耀南,周顯恩,尹阿婷,趙輝平,劉磊
(1. 湖南大學 電氣與信息工程學院,湖南 長沙 410082; 2. 機器人視覺感知與控制技術國家工程實驗室,湖南長沙 410082)
隨著社會的不斷發展和科技的不斷進步,以中國象棋機器人為代表的娛樂服務型機器人,逐漸成為機器人研究領域的熱點之一。
中國象棋機器人研究開始于21世紀初,2004年上海交通大學黃立波等[1]利用開放式控制器,成功開發了國內第一臺中國象棋對弈機器人,同期多種對弈機器人相繼誕生[2]。早期的中國象棋機器人棋子的定位與識別采用非視覺方式,如特制不同電阻值[3-4]或光敏電阻[5]的棋子與設計電子棋盤的方式進行棋子的定位與識別,類似地還可采用射頻[6]等方法。這些非視覺的識別法都有:系統需特殊設計定制,適應性不強等缺點。隨著機器視覺技術的發展,棋子的定位與識別也逐漸采用機器視覺的方法。
在棋子定位問題上:大多依靠棋盤間接定位,例如,許豐磊[7]對棋盤內90個小區域進行輪廓跟蹤與提取,進而判斷棋子位置;肖克先等[8-9]、杜俊俐等[10-11]通過對棋盤十字交點處進行檢測。以上棋子定位方法均依靠棋盤直線檢測或交點檢測,無法做到脫離棋盤定位,且定位精度不高。
在棋子識別問題上:棋子識別實質就是字符識別,其研究相對比較成熟,但目前字符識別研究和應用最多的領域是汽車車牌的識別[12-13]。與傳統字符識別不同,象棋棋子識別具有旋轉任意性,目前針對中國象棋棋子字符的識別研究不多。馮元華[14]和莫妙桃[15]使用文字連通數、字符年輪統計等特征進行字符識別,但其需要預先對棋子字符進行特征統計,步驟繁瑣且正確率基本在83%左右。隨著計算機硬件和機器學習的發展,更多人嘗試使用BP神經網絡[16]、深度學習[17-18]等進行棋子識別。但機器學習或深度學習需要的訓練樣本大,訓練時間長,實時性不強,更換棋子后同樣需要重新訓練,步驟復雜繁瑣。
針對上述棋子定位中存在的依靠棋盤定位、定位精度不高等問題,本文提出了一種基于最小外接圓二次定位棋子定位方法,能夠快速高精度實現棋子定位。針對當前傳統文字識別方法識別率低,而基于機器學習的字符識別方法,存在訓練時間長、實時性不強的問題,本文提出了一種旋轉差分識別算法,實現棋子快速精準識別。
1 系統結構
我們自主搭建了象棋機器人的硬件平臺,其結構示意圖如圖1所示。系統主要由URAM四軸機械臂及相連的攝像機、計算機、象棋棋盤和輔助光源組成,該系統可實現兩個功能:1)開局階段自動擺棋功能;2)人機對弈功能。該系統有兩個工作區域:擺棋區域和棋盤區域。本文以擺棋區域內棋子的定位與識別進行研究。
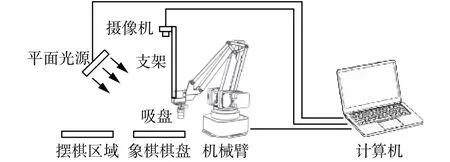
圖 1 象棋機器人系統結構示意Fig. 1 Sketch map of chess robot system
2 定位與識別算法
本文算法整體流程圖如圖2所示。

圖 2 算法整體流程圖Fig. 2 The whole flow chart of the algorithm
2.1 一次定位與預處理
一次定位與預處理整體流程如圖3所示。
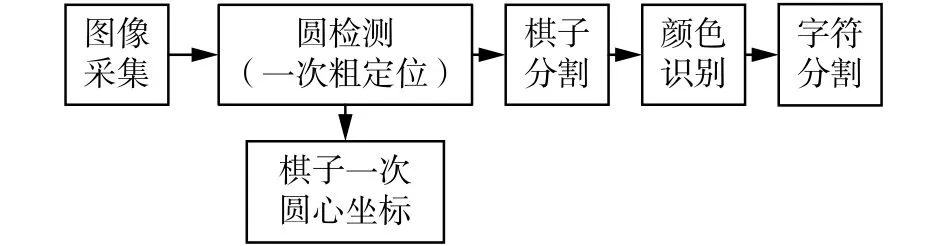
圖 3 一次定位與預處理流程圖Fig. 3 first positioning and pretreatment flow chart
首先對擺棋區域進行圖像采集,本系統使用普通家用網絡攝像頭,圖像分辨率為:1 280像素×720像素,測試所用棋子的直徑為15 mm。
1)圓檢測一次粗定位
棋子定位問題就是圓檢測問題。圓檢測算法主要有:最小二乘法[19-20]、多隨機圓擬合度評估[21]等擬合方法。這類方法圓檢測準確度高,運算量少,但其對噪聲敏感,且不能一次檢測多個圓。還有Hough變換[22]等投票(聚類)方法。這類方法將樣本點映射到參數空間,用累加器或者類聚的方法來檢測圓。這類方法對噪聲不敏感,且可以一次檢測多個圓,但其計算量大運算時間長。
本系統運行背景較復雜,有外界因素影響,因此需要圓檢測具有較強的魯棒性,且需要一次性檢測出多個圓形。系統對于棋子的定位精度和識別準確度要求很高,但對于運行時間要求不高,因此綜合以上考慮,本文使用Hough變換進行棋子一次粗定位。
對采集到圖像進行Hough變換的粗定位,定位效果圖如圖4所示,并可得到粗定位圓心坐標。
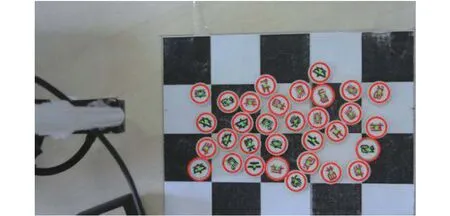
圖 4 一次定位圖像Fig. 4 First positioning effect image
2)棋子分割
隨后根據該定位坐標基于區域的圖像分割將棋子前后景分離和棋子分割。
3)顏色識別
將RGB模型圖片轉換為HSV模型,隨后對HSV模型中的各個值進行統計,尋找紅、黑顏色的特征。
經過實驗后得到:本文所使用棋子,紅色H(H:hue)值范圍為170~180;黑色H值范圍為103~106,利用紅色和黑色顏色的色調不同取值,就可將紅色和黑色的棋子圖像進行識別。
4)字符分割
由棋子圖像的灰度直方圖:由圖5可知,棋子圖像的灰度分布具有很大離散性,即棋子背景灰度值較集中為一種灰度值,黑色或紅色字符集中為另一灰度值,且兩者相差較大。
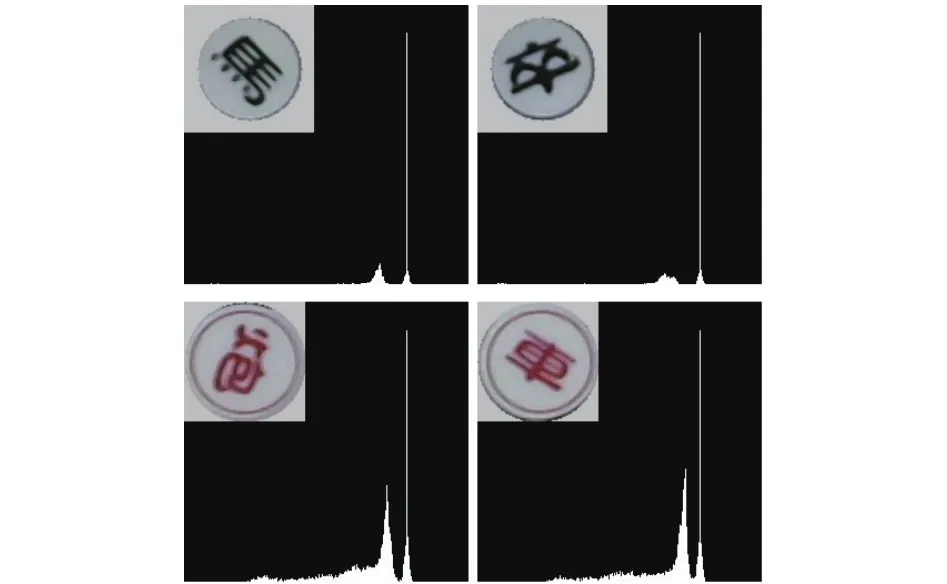
圖 5 棋子圖片直方圖Fig. 5 The histogram of chess image
因此采用均值閾值分割進行二值化處理,首先計算圖像像素灰度均值:T之后根據均值選定閾值進行分割:

式中K為比例系數。通過實驗確定K取0.75時,字符分割效果較好。
2.2 棋子二次精確定位
系統工作環境較為復雜,干擾多,且所用棋子較小(僅為15 mm),成像分辨率低。因此粗定位效果,部分棋子定位效果較差如圖6所示。需要對棋子進行定位修正以確保定位精準。

圖 6 定位效果Fig. 6 Positioning effect
本文提出的一種基于字符最小外接圓的定位修正方法的流程圖如圖7所示。

圖 7 二次定位流程圖Fig. 7 The flow chart of second positioning
二次定位算法步驟:
1)圖片載入及預處理。由一次粗定位得到原始字符圖如圖8(a),及粗定位圓心如圖8中紅色圓點表示。預處理得二值化字符如圖8(b)。

圖 8 二次定位中間過程圖Fig. 8 Process image of second positioning
2)尋找最大輪廓。對二值化字符進行形態梯度運算如圖8(c)。對形態梯度圖進行輪廓提取,依次遍歷所有輪廓并計算輪廓面積,保留面積最大的輪廓,如圖8(d)所示。
3)尋找輪廓外接圓。由于圓具有穩定性和唯一性,因此尋找字符最大輪廓的最小外接圓如圖8(e),外接圓圓心如圖中綠色圓點所示。
4)修正圓心。由最小外接圓,重新截取字符圖片如圖8(f),保證字符位于圖像中心位置,為后續識別工作做準備。同時由兩次圓心坐標對比可得定位誤差,并對粗定位圓心坐標進行修正,從而得到棋子精確的圓心坐標。
2.3 字符識別
棋子識別本質上就是字符識別,但不同于傳統的字符識別,在擺放過程中棋子可能旋轉任意角度,而造成字符傾斜,而傳統基于像素的模板匹配識別不具有旋轉不變性。如何克服圓形棋子的旋轉特性是中國象棋棋子識別的難點。本文提出了一種旋轉差分識別算法,其具體流程圖如圖9所示。
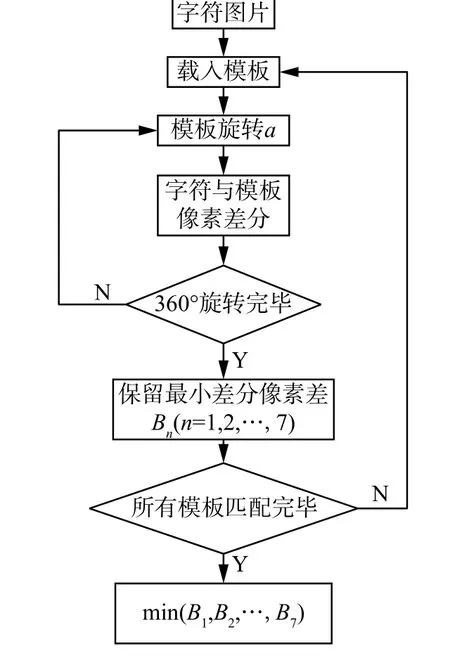
圖 9 旋轉差分識別算法流程Fig. 9 Flow chart of recognition algorithm
載入已制備模板圖,將待識別圖與其做像素差分如圖10所示,并保留差分值。隨后,將模板旋轉a°后重復上述操作,直至360°旋轉完畢為止。統計各個旋轉角度的像素差分值,保留其中的最小值,記為Bn(n為模板序號,為1, 2,···,7)。
然后再和第2個模板進行上述操作。依次和所有7個模板進行上述操作后,則最小的Bn對應的字符,即為待識別棋子的識別結果,隨即可得其對應的棋盤的位置。識別效果如圖10所示。
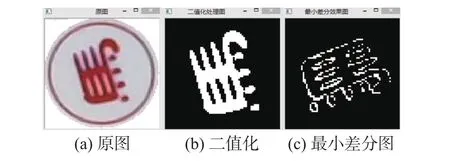
圖 10 識別效果Fig. 10 Recognition effect image
3 實驗結果與分析
本系統硬件平臺如圖11所示,攝像機為普通家用網絡攝像頭,分辨率為:1 280像素×720像素。象棋棋子直徑為:15 mm。計算機 CPU 為intel core i5—4 200 M,主頻 2.5 GHz,通過軟件開發平臺Visual Studio 2012和Open CV2.4.9編寫C + +程序,對棋子進行了定位與識別算法驗證。
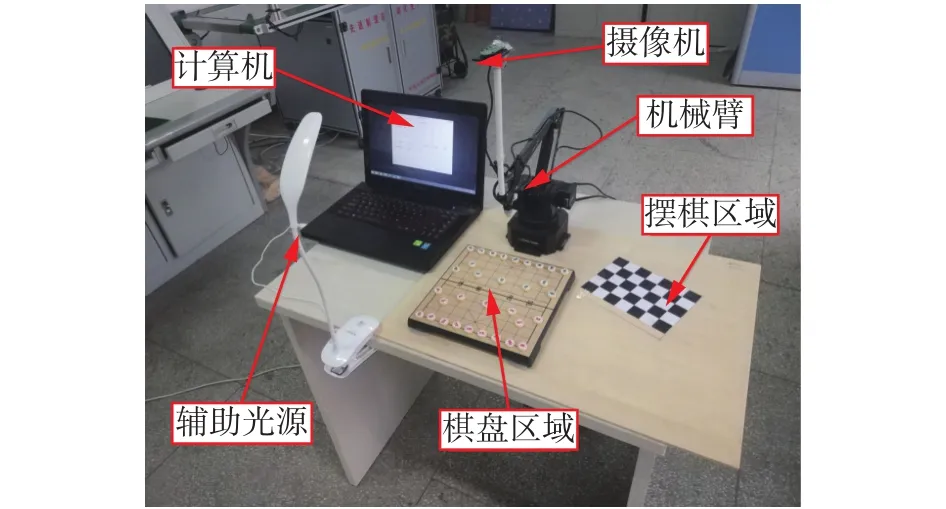
圖 11 中國象棋機器人系統硬件平臺Fig. 11 Hardware platform of Chinese chess robot system
3.1 棋子定位實驗
利用本系統采集4張擺棋區域的圖像,每張圖片中包含32個棋子,共128個棋子。隨后對每張棋子圓心進行人工標定,將檢測定位坐標和標定坐標對比,得到定位誤差,如表1 所示。
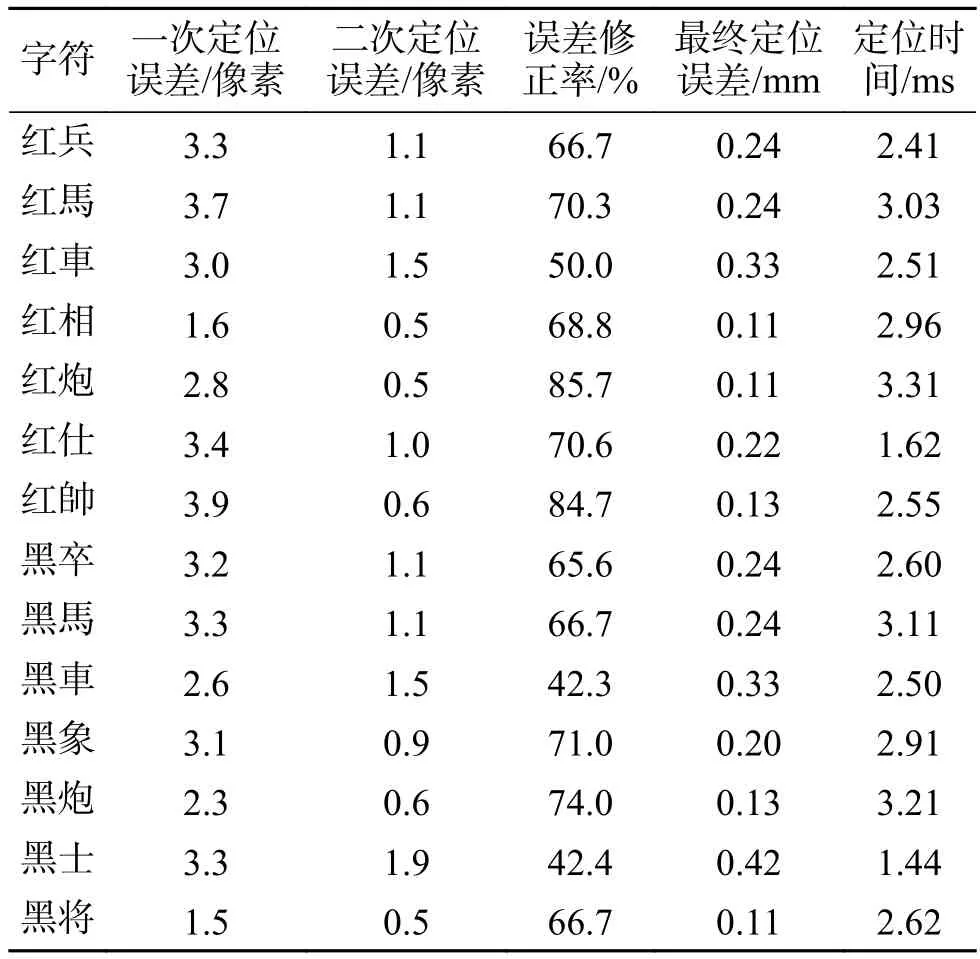
表 1 定位結果Table 1 Location result
兩次定位誤差為歐氏距離D,單位為像素(pixel)。定義誤差修正率:

該參數可以反映定位精度的提升程度。由式(2)可知,定位精度提升均在40%以上,大部分在60%或70%以上,最高可達80%。
本系統使用棋子直徑為15 mm,通過比例換算,可以得到最終實際定位誤差。實驗結果表明:棋子定位精度均在0.50 mm以上,最高定位精度達到0.11 mm,定位精準。棋子的平均定位時間為2.61 ms,定位快速,滿足象棋機器人快速精準定位的要求。
各個字符定位精度存在差異:” 將”、“帥”、“炮”等的定位精度較高達到0.1 mm級別;而“士”、“車”的定位精度較低,僅為0.5 mm左右。因為相比于“將”、“帥”等左右結構分布的文字,“士”、“車”等為一體的豎長結構,造成其最大輪廓外接圓穩定性不足,定位存在較大偏差。
定位時間存在差異,“士”、“仕”定位時間短達到1.5 ms左右;而“馬”、“炮”等字符定位時間長為3.0 ms左右,這是因為:“士”、“仕”等字符的筆畫較少的文字,“馬”、“炮”等較多,進行輪廓提取后字符輪廓數量多,輪廓遍歷時遍歷的次數多,而造成定位時間長。
3.2 棋子識別實驗
本文采用旋轉差分識別算法,因此棋子識別率和差分時模板每次旋轉角度a密切相關,且算法的運算時間也與其直接相關,a越小,即識別率越高但運算效率越差。如何平衡識別率和運算效率,是該算法要解決的關鍵問題。
采集20副圖像共640個棋子進行測試,在0°~45°區間內分別設定了不同的差分旋轉角度a°進行11次實驗,如表2 所示。注:運算時間為單個棋子的全流程平均運算時間,包括定位與識別。
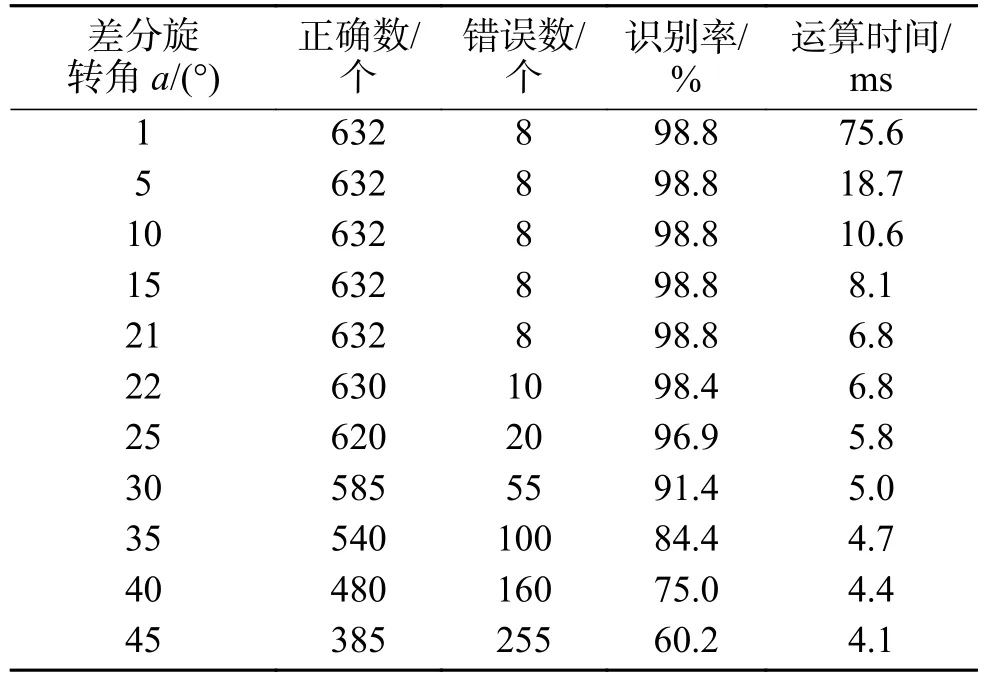
表 2 識別結果Table 2 Recognition result
由表2可以得到棋子識別率和運算時間與差分旋轉角度a的關系圖,如圖12和圖13所示。
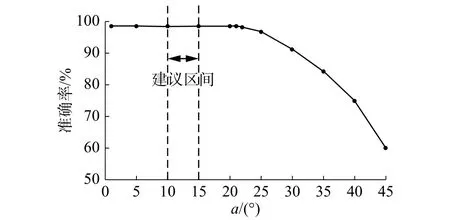
圖 12 識別準確率Fig. 12 Recognition accuracy
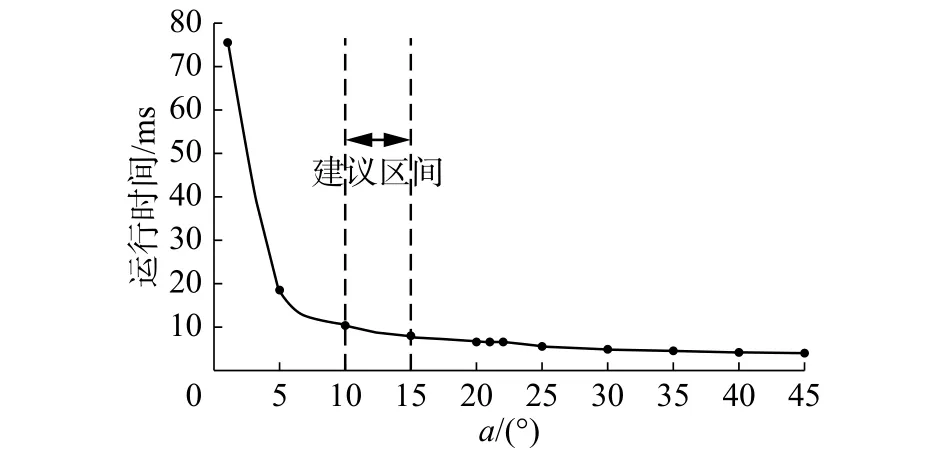
圖 13 運算時間Fig. 13 Operation time
對圖12、13進行分析,從識別率來看,當旋轉角度在1°~21°變化時,系統均保持較高的準確率,達到98%。當角度超過21°以后,準確率開始下降并且下降速率越來越快。
從運算時間來看,角度為1°時處理一個棋子平均耗時75.6 ms。但隨著角度不斷增大,運算時間迅速減小,為5°時,運算時間已減小到18.7 ms。隨后減小速率不斷放緩。
綜合識別率和運算時間分析,該系統差分識別算法的旋轉角度選擇10°~15°較為適宜。在此角度范圍內,棋子識別率較高為98%左右,全流程運算時間為10 ms左右,滿足象棋機器人系統的要求。
選定旋轉差分角a=13°,對20幅圖片中各個字符識別情況分別統計如表3所示。其中錯誤識別為:“炮”錯誤識別為“相”;“馬”和“兵”之間錯誤識別;“車”和“卒”之間錯誤識別。字符之間相互錯誤識別的原因和如何進一步提升算法的識別準確率是下一步研究的重點。
3.3 實驗結果對比
將本文在旋轉差分角度設定在13°情況下的實驗數據與文獻[17]的實驗數據進行對比,得到結果如表4所示。
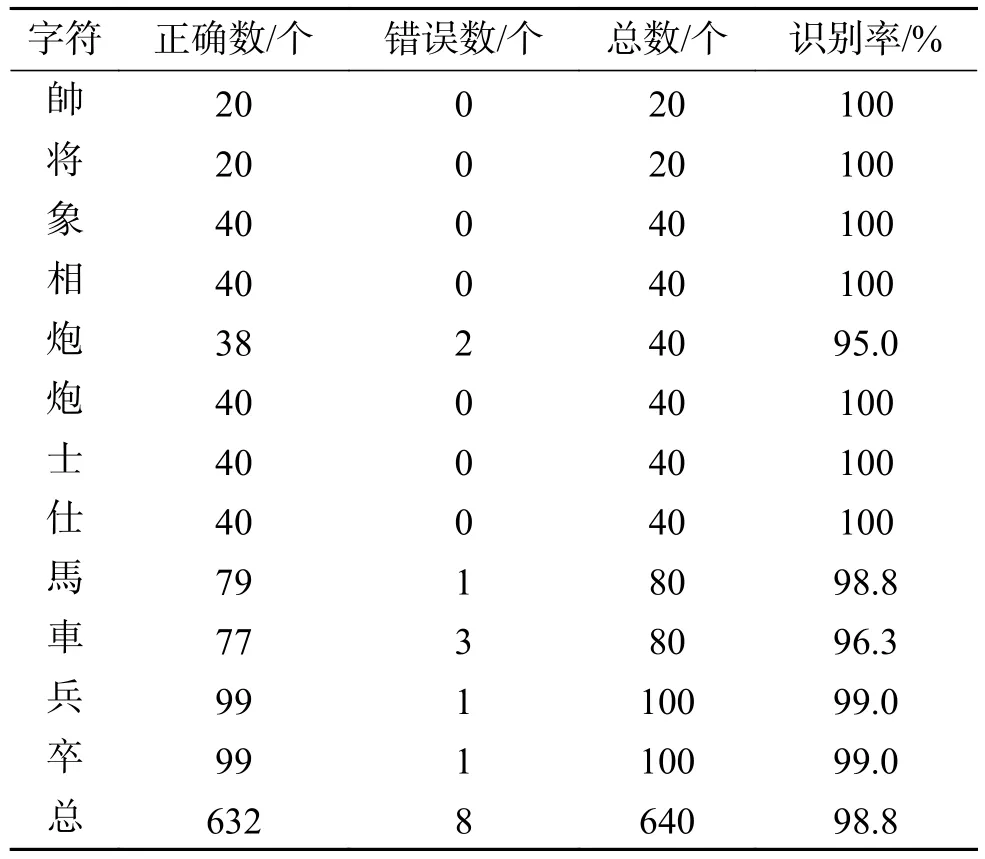
表 3 旋轉差分角為13°時的識別結果Table 3 Recognition results when the angle is 13 degrees
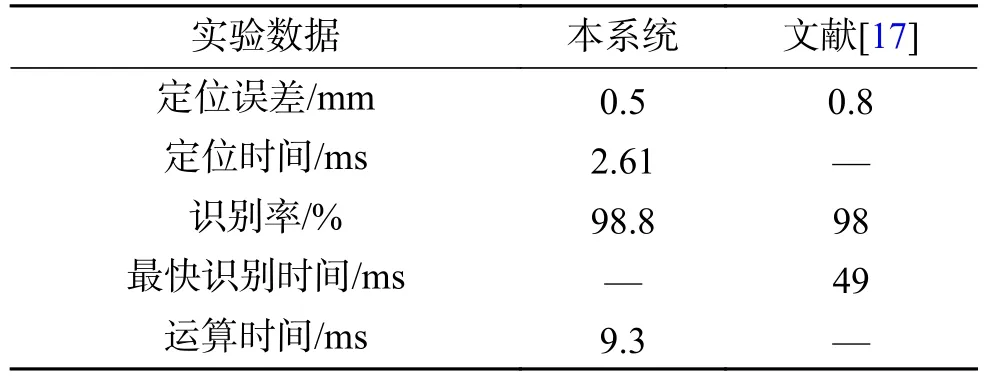
表 4 對比測試結果Table 4 Comparison of test result
從表4可知,本象棋棋子定位與識別系統棋子定位誤差0.5 mm略低于文獻[17]的0.8 mm,識別準確率98.8%略高于文獻[17]的98%,該兩項指標相差不大。但本系統棋子全流程運算時間僅為9.3 ms,遠遠小于文獻[17]的最短識別時間49 ms。
本文使用的攝像機為普通網絡攝像頭分辨率為1 280像素×720像素,文獻[17]使用的是工業高清相機分辨率為1 000像素×1 000像素;本文使用的棋子為直徑15 mm,文獻[17]使用的棋子直徑為28 mm;且文獻[17]的測試環境較為簡單,為測試平臺箱內部,本文的測試環境較為復雜。因此,本文的綜合測試效果優于文獻[17],具有良好的應用前景。
4 結束語
本文針對中國象棋機器人中棋子視覺定位與識別問題,提出了一種基于最小外接圓二次定位的定位方法和一種旋轉差分識別算法。實驗結果表明該定位方法能夠實現棋子的快速高精度定位,定位精度達到0.5 mm,平均定位時間為2.6 ms;能夠快速精準地識別棋子,在保證棋子識別準確度達到98%以上的情況下,單棋子全流程運算時間為10 ms左右,完全滿足現有象棋機器人的指標要求。
目前該算法在個別字符定位誤差和識別準確度、棋子定位時間、棋子全流程運算時間等方面存在進一步優化空間,這將是下一步研究的重點。