毛豆機械化收獲國內外研究現狀及展望
2018-09-19 12:09:08朱建錫陳長卿徐錦大
時代農機 2018年7期
關鍵詞:研究
朱建錫,鄭 濤,陳長卿,費 焱,徐錦大
(浙江省農業機械研究院,浙江 金華 321017)
毛豆又稱為枝豆或者菜用大豆,是指豆莢飽滿,莢色、籽粒呈翠綠色,在籽粒還沒有達到完全成熟,即生理上處于R6(鼓粒盛期)至R7(初熟期)籽粒填充達到莢長的80%~90%時采收的大豆類型[1]。我國毛豆主要采摘鮮莢,經加工處理,速凍冷藏后出口日本、歐美等國家[2]。由于毛豆生長周期短,一年可種植兩季,產值較高,一般畝產500~600 kg,在價格好的年份畝產純利潤可達800~1200元[3],經濟效益非常顯著,已逐漸成為我國出口創匯的主要蔬菜之一。目前,中國是世界上最大的菜用大豆生產國和出口國,栽培面積在10萬~15萬hm2之間,主要產區為浙江,福建,江蘇等沿海地區及南方其它省區。2011年浙江省毛豆的種植面積約為6.67萬hm2,江蘇省約為3.3 萬~4萬 hm2。
毛豆豆莢的特點一是鮮嫩,不能受重力打擊或擠壓。二是數量大,每畝株數多,約2萬~3萬株。三是分布不集中,全植株上下幾乎各節都有,必須一株一株處理,一節一節采摘,這些給采摘增加了相當大的難度[4]。現在人工每采摘一畝豆莢,按平均畝產1500斤鮮莢,每斤采摘人工工資0.35元計算,每畝僅采摘就約需10個工人,工資費用超過了500元[5]。毛豆采摘效率低,制約了生產的擴大,費用高,增加了生產成本,影響了農民的收入。如果能夠實現毛豆的機械化采摘,一是有利于增加毛豆產量,滿足社會的需求,二是有利于增加農民收入。
1 國外毛豆收獲機研究現狀
美國的毛豆收獲機主要采用非切割,利用兩根旋轉軸使單株毛豆從旋轉軸中間通過從而拍落豆莢的收獲方式。拍落方式主要有螺旋型和旋轉毛刷型兩類。從文獻檢索來看,美國在20世紀50年代就研制成功了一種毛豆收獲機。該收獲機結構較復雜,而后在1969年出現了一種結構較簡單,可獨立進行田間收獲的螺旋式小型毛豆收獲機。2000年美國內布拉斯加大學生物系統工程學院C.Mesquita等人對毛豆收獲機的收獲方式、結構、收獲效率、破損率、能耗等進行了比較全面的研究。2009年美國Rogerio Cruz Moreira等人研制了一種可懸掛的旋轉毛刷型毛豆收獲機。
美國H.Morgan等人研制出了一種豆莢類蔬菜和水果收獲機。該收獲機的機架由安裝于行進輪上的薄壁圓柱體(D≈1000 mm)組成。該薄壁圓柱體前端敞開,以使單株毛豆能夠進入到圓柱體中。在薄壁圓柱體的前下端焊有一對平行且對稱于圓柱體中心線的扶禾機構,在扶禾機構之間連接有一個大約半個圓柱體長的矩形狹槽以引導毛豆枝干進入到圓柱體中。薄壁圓柱體內盤繞有剛性螺旋桿,該螺旋桿通過焊接盤繞并固定在圓形支撐板上,螺旋桿由安裝于薄壁圓柱體上端的汽油機通過減速帶傳動從而實現繞中心軸的旋轉。螺旋桿的前下端安裝有一個可旋轉的螺旋刷子,該螺旋刷子由六圈與螺旋桿旋向相反的螺旋桿組成并通過圓柱軸承和支撐架固定于薄壁圓柱體上。螺旋刷子的直徑大約為螺旋桿直徑的四分之一,由汽油機通過驅動桿和帶傳動帶動旋轉。螺旋桿和螺旋刷子共同組成了該收獲機的執行機構,在進行收獲作業時螺旋桿順時針慢速(20~30 r/min)旋轉,螺旋刷子高速(螺旋桿轉速的2~3倍)逆時針旋轉進而將進入圓柱體的毛豆打落實現毛豆的收獲如圖1所示。在薄壁圓柱體后半部分的下端開有一縱向槽,在縱向槽的正下端安裝有一傳送帶,該傳動帶用于收集打落的毛豆然后將毛豆送至板條式上升帶中。
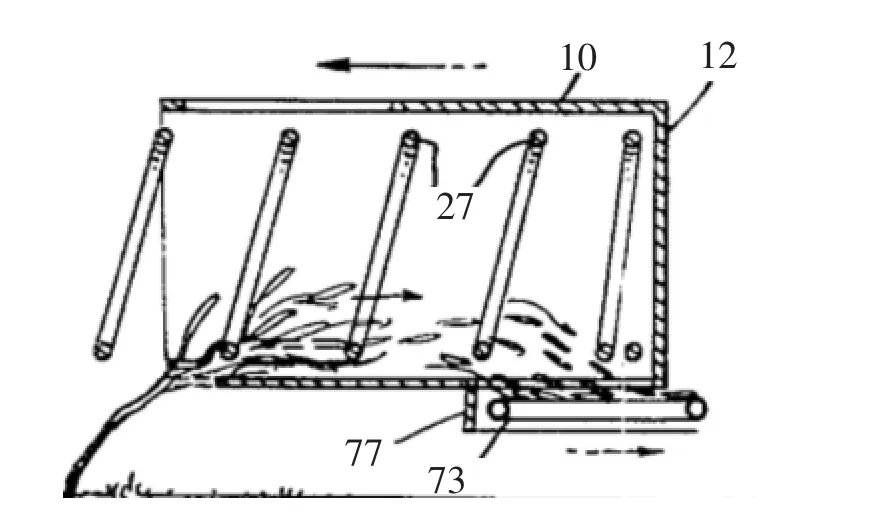
圖1 毛豆收獲示意圖
2000年美國內布拉斯加大學生物系統工程學院C.Mesquita等人對旋轉軸式毛豆收獲機構行了研究,該機構主要由兩個互相平行且旋向相反的旋轉軸和安裝在旋轉軸上的尼龍繩組成。旋轉軸直徑為3.1 cm,長度為1.5 m,兩根旋轉軸之間間隔為10 cm并與水平線成30°,每根尼龍繩長度為10 cm并且間隔1 cm。旋轉軸以2600 r/min的速度帶動尼龍繩旋轉,從而實現豆莢的收獲。該機構可通過三點連接在拖拉機前端拆卸、安裝方便。在進行收獲作業時,驅動旋轉軸的扭矩大約為3.5 Nm,并且在4個不同的行駛速度(2.2,3.2,6和 7.2 km/h)下作業 1 h所需的能量分別為6.7,4.7,2.4和2 MJ/ha,由于直接在植株上收獲豆莢因此相比于傳統的聯合收割機(80 MJ/ha)減少了能量消耗5~16倍。采用隨機化完全區組設計對10個重復樣本在 4個不同的行駛速度(2.2、3.2、6.0、7.2 km/h)下的收獲效率、豆莢分離率、收獲雜質率進行了試驗研究。根據試驗結果認為:(1)在較高的行駛速度(6.0,7.2 km/h)下豆莢分離率降低了24%而收獲效率較行駛速度為2.2 km/s和3.2 km/s時并未明顯降低,因此當行駛速度為6.0 km/s或7.2 km/s時具有較大的優勢。(2)在4個不同的行駛速度下收獲的雜質率平均值為29%比傳統的聯合收割機(幾乎為100%)要低很多。同時采用另一個隨機化完全區組設計對4個重復的樣本在4個不同的行駛速度(2.2、3.2、6.0、7.2 km/h)下的機械損傷率、機械破損率、種子存活率進行了試驗研究。根據試驗結果認為:(1)與人工采摘相比較,豆莢的損傷率并沒有明顯增大但相比于傳統的聯合收割機損傷程度明顯減少。(2)在4個不同的行駛速度下豆莢的平均破損率為0.4%而聯合收割機為8.38%。(3)當行駛速度為6.0 km/h和7.2 km/h時種子的存活率(78.5%、74.0%)與人工采摘(78.5%)大抵相同,但行駛速度為2.2 km/h和3.2 km/h時存活率(67.2%和67.0%)明顯降低。
美國Rogerio Cruz Moreira等人研制出了一種毛豆收獲機。在作業時使毛豆從兩根平行旋轉軸(L=1500 mm,D=25 mm)中間通過,旋轉軸上安裝有脫粒吊環,而在脫粒環上又嵌有六根剛性細桿。旋轉軸由電機通過齒輪箱帶動旋轉(2600 r/min)從而實現毛豆豆莢的收獲,收獲機的前進速度為5 km/h。在兩根平行旋轉軸的下方裝有氣動系統,該氣動系統由鼓風機和空氣管組成,主要用來收集打落的豆莢,將豆莢吹向輸送管從而進入收集室。
2 國內毛豆收獲機研究現狀
目前,國內對毛豆機械化收獲的研究主要有小型青毛豆收獲機[6-8]、毛豆聯合收割機[9-11]和青毛豆脫粒機[12、13]等,而毛豆采收的執行機構多采用脫粒滾筒式。然而對采收機構的收獲效率、破損率、能耗等相關性能參數方面的研究還比較少。目前,在國內市場上銷售的主要有南通市春風農業機械制造有限公司生產的祥明毛豆收割機和山東巨明機械有限公司研制的多功能自走式大豆聯合收獲機,同時已有多項臺式青毛豆脫粒機的專利和相關產品。
2010年山東巨明機械有限公司研制了多功能自走式大豆聯合收獲機,該收獲機也可用于毛豆的收獲[9]。該聯合收獲機主要由撓性割臺、鏈式刮板輸送器、脫粒清洗總成、豆桿豆皮箱、糧箱和動力驅動底盤組成,如圖2所示。在進行收獲作業時,收獲機放下撓性收割臺,機器邊行走邊收獲。毛豆莖桿由動刀從根部切斷,由割臺攪動龍推到刮板升運器入口,在其作用下向后輸送到脫粒機室,經切流滾筒和軸流滾筒的共同作用,豆粒從莖桿上分離,連同豆皮一起從四板篩間隙進入清選室,與收獲大豆不同的是在進行毛豆的收獲作業時無需將豆粒從豆莢中分離出來,在該專利說明書中并未對切割和脫莢裝置進行說明。
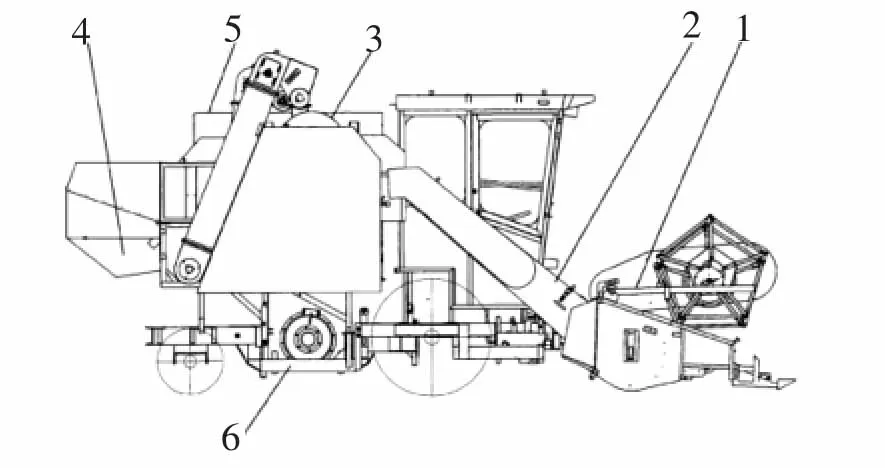
圖2 多功能自走式大豆聯合收獲機
南通市春風農業機械制造有限公司研制的毛豆聯合收割機如圖3所示。該收割機適用于在平原地帶進行大面積的收獲作業。
2010年武漢市黃陂區石門群山科研所研制了一種摘毛豆機[7],如圖 4 所示。
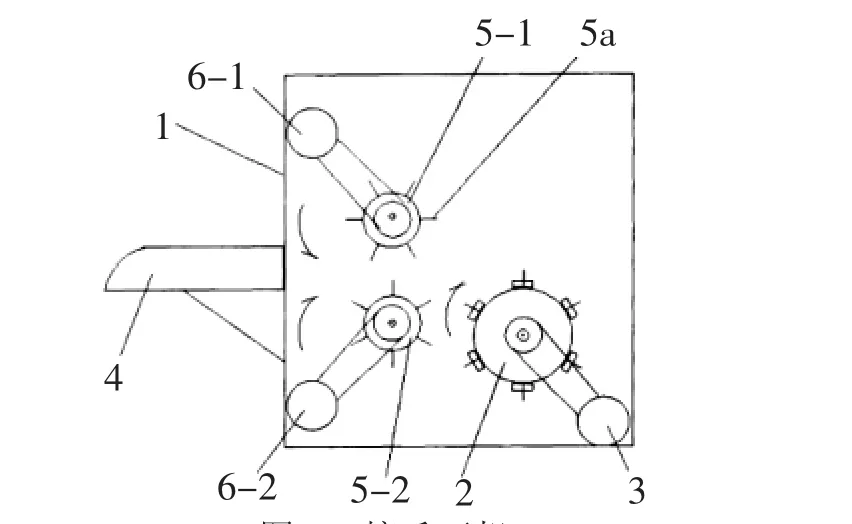
圖4 摘毛豆機
該收獲機包括機架、安裝在機架上的轉動部分及其驅動部分,其轉動部分是摘豆輥或摘豆帶,摘豆輥是在傳動輥上安裝4~8排摘豆刷構成的,摘豆帶是在水平前后平行放置的兩個傳動輥上安裝傳動帶,傳動帶上安裝4~8排摘豆刷。傳動輥的轉速為400~600 r/min,夾持輥的轉速為 150~250 r/min。
2012年華中農業大學研制了一種青大豆脫莢分離機構[12]。該機構采用夾持喂入輥筒組合和豆莢剝離輥筒組合為主要工作部件,工作原理與前述摘毛豆機基本相同。不同的是該機構可以通過夾持喂入輥壓力調節彈簧與豆莢剝離輥壓力調節彈簧,使夾持喂入輥筒組合與豆莢剝離輥筒組合的工作間隙隨著青大豆莖稈喂入量的變化不斷進行調節,能將青大豆莢與莖稈有效分離,提高了工作效率和作業質量,減少了分離后的青大豆莢造成損壞。
2014年河南農業大學王顯鋒對自走式菜用大豆摘莢機關鍵部件進行了設計研究[14],該研究從菜用大豆的種植模式、植株性狀和豆莢性狀著手,參考線辣椒采摘裝置的采摘機理,設計了慢速夾持式采摘機構,主要由彈齒、摘莢滾筒、摘莢帶和張緊滾筒組成,利用采摘帶上和采摘滾筒上的摘莢齒之間的配合夾緊將豆莢摘下,利用采摘帶將采摘的豆莢輸送到一級傳送帶上。
2015年南通市農機化技術推廣中心研制了4LDZ-48型青毛豆聯合收獲機[10],采用橫向刺式和豎向輥式組合采摘技術,青毛豆聯合收獲機主要性能參數為:損失率4%、清潔度98%、破碎率2%、作業效率0.067 hm2/h。
3 青毛豆收獲執行部件的研究
由于毛豆的收獲原理與辣椒等農作物的收獲具有一定的相似性,因此可以借鑒相關的研究與設計將其應用到毛豆收獲機中[14]。例如國內新疆石河子大學和新疆農業大學都對脫粒滾筒的結構設計進行了相關的研究[15]。新疆農業大學和新疆機械設計研究院有限公司對辣椒收獲機彈齒式采摘臺進行了設計與研究,設計的彈齒采用不銹鋼彈簧鋼絲OCr18Ni9環繞而成,鋼絲直徑為6 mm端部有16~20度傾角,具有采摘、拋送、防止采摘物脫落的特點[16]。該采摘裝置主要由彈齒、滾筒、側板、護板、機架等部件組成。由于對辣椒收獲機脫粒滾筒的彈齒進行設計與分析,其結構尺寸和參數并不適用于毛豆的收獲,但是在脫粒滾筒上安裝彈齒來對作物進行收獲以提高采摘率與減少破損率,這一設計思路同樣可應用于毛豆收獲執行機構的設計中。
4 總結和展望
國外對毛豆的收獲多采用直接從植株上收獲豆莢的方式。這種收獲方式有利于提高收獲效率、減少能耗,更加有利于減少制造單一收獲機的生產成本,提高農業機械的利用率和普及率。但是并未檢索到他們對收獲豆莢后的毛豆植株進行處理的相關研究文獻,國內的聯合收割機也同樣存在這樣的問題。而且大型的毛豆聯合收割機適用于北方大面積種植且地勢平坦的毛豆收獲,對于南方種植面積小且種植分散的毛豆收獲有著其很大的弊端。而目前國內研制的青毛豆脫粒機需要先將毛豆收割再進行脫粒,收獲步驟繁瑣,收獲效率低,在搬運過程中造成豆莢損失。
因此為實現毛豆的機械化收獲,應著重考慮以下幾個方面的問題:
(1)研制懸掛式的毛豆收獲機。結合國內外的收獲方式,重點對旋轉軸式和滾筒式進行比較,設計一種可懸掛于拖拉機前端的毛豆收獲機。
(2)考慮對收獲豆莢后的毛豆植株進行處理。參考現有對毛豆莖桿的利用方式,可在拖拉機后端底部安裝懸掛犁或切割臺。
(3)研究毛豆莖桿的機械特性。為實現毛豆的機械化采摘,應先研究毛豆植株性狀及材料物理機械性能。應重點研究對毛豆的株高、莖粗、主莖節數、單株莢數。將毛豆莖桿視為一種材料研究其彈性模型、泊松比和密度。
(4)使用機械收獲的毛豆應該符合出口菜用大豆國家標準。出口標準中對毛豆豆莢的長度、寬度和機械損傷都作了相關的規定。因此實現毛豆的機械化收獲應研究如何減少青豆莢的機械損傷。
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
科技傳播(2019年22期)2020-01-14 03:06:54
遼金歷史與考古(2019年0期)2020-01-06 07:45:20
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
電子制作(2018年11期)2018-08-04 03:26:04
汽車工程學報(2017年2期)2017-07-05 08:13:02
國際商務財會(2017年8期)2017-06-21 06:14:14
電子制作(2017年23期)2017-02-02 07:17:19