基于數(shù)字圖像的自適應(yīng)多機(jī)動(dòng)目標(biāo)模型跟蹤方法
2018-09-20 02:10:54劉鋼王蓉暉
電子測(cè)試
2018年17期
關(guān)鍵詞:模型
劉鋼,王蓉暉
(1.空軍航空大學(xué)基礎(chǔ)部,吉林長(zhǎng)春,130022;2.吉林建筑大學(xué)電氣與計(jì)算機(jī)學(xué)院,吉林長(zhǎng)春,130018)
1 幾種典型的機(jī)動(dòng)目標(biāo)模型
1.1 辛格模型
1.2 當(dāng)前狀態(tài)統(tǒng)計(jì)模型

其中a(t)為機(jī)動(dòng)加速度當(dāng)前均值,在每一采樣周期內(nèi)為常數(shù)。
把上式帶入一階時(shí)間相關(guān)方程,可得:

將上式寫(xiě)為狀態(tài)方程,即為機(jī)動(dòng)目標(biāo)“當(dāng)前”統(tǒng)計(jì)模型:

1.3 階躍模型


W(k)和 V (k)是不相關(guān)的高斯白噪聲序列。F (k)為狀態(tài)轉(zhuǎn)移矩陣,表達(dá)式為:
2 Monte Carlo仿真實(shí)驗(yàn)
在常加速度情況下,比較辛格模型和當(dāng)前狀態(tài)統(tǒng)計(jì)模型,進(jìn)行目標(biāo)加速度估計(jì)。這里α=0.1,T=1s,a = 2 0 m /s2,時(shí)間是在 t = 0 ~100s,圖1中實(shí)線和離散點(diǎn)分別描繪的是當(dāng)前狀態(tài)統(tǒng)計(jì)模型和辛格模型的加速度統(tǒng)計(jì)。辛格模型的均方根誤差為2.83,均值誤差為0.59;當(dāng)前狀態(tài)統(tǒng)計(jì)模型的均方根誤差為1.95,均值誤差為-0.14。
如圖2所示,變加速機(jī)動(dòng)不適合辛格模型。所以在這里比較了當(dāng)前狀態(tài)統(tǒng)計(jì)模型和階躍模型。圖2是在變加速度情況下,進(jìn)行目標(biāo)加速度估計(jì)。如圖2中離散點(diǎn)描繪的是階躍模型的加速度統(tǒng)計(jì),實(shí)線描繪的是當(dāng)前狀態(tài)統(tǒng)計(jì)模型的加速度統(tǒng)計(jì)。階躍模型的均方根誤差為3.64,均值誤差為0.92,當(dāng)前狀態(tài)統(tǒng)計(jì)模型的均方根誤差為2.86,均值誤差為-0.34。
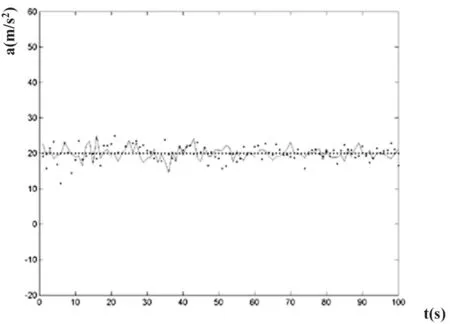
圖1 常加速運(yùn)動(dòng)的目標(biāo)加速度估計(jì)
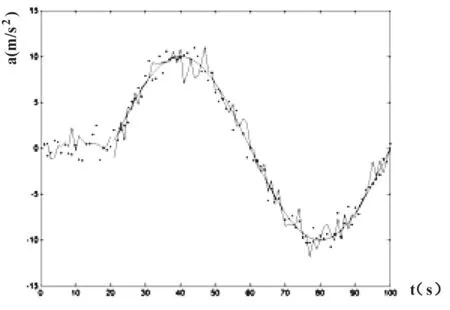
圖2 變加速運(yùn)動(dòng)的目標(biāo)加速度估計(jì)
下面比較了當(dāng)前狀態(tài)統(tǒng)計(jì)模型和階躍模型。這里α=0.1,T= 1 s,如圖3中離散點(diǎn)描繪的是當(dāng)前狀態(tài)統(tǒng)計(jì)模型的加速度統(tǒng)計(jì),實(shí)線描繪的是階躍模型的加速度統(tǒng)計(jì)。階躍模型的均方根誤差為4.78,均值誤差為1.65;當(dāng)前狀態(tài)統(tǒng)計(jì)模型的均方根誤差為6.23,均值誤差為-1.82。……
登錄APP查看全文
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
中學(xué)數(shù)學(xué)雜志(初中版)(2006年1期)2006-12-29 00:00:00

- 電子測(cè)試的其它文章
- 欠驅(qū)動(dòng)冗余度機(jī)器人運(yùn)動(dòng)優(yōu)化控制的分析
- 機(jī)械電子節(jié)能控制技術(shù)應(yīng)用分析
- 人臉識(shí)別技術(shù)在智慧校園中的應(yīng)用研究
- 農(nóng)業(yè)供電公司電力調(diào)度數(shù)據(jù)網(wǎng)設(shè)計(jì)與研究
- 基于數(shù)據(jù)挖掘的農(nóng)業(yè)電網(wǎng)電力調(diào)度管理系統(tǒng)設(shè)計(jì)與研究
- 單片機(jī)在電子技術(shù)中的應(yīng)用優(yōu)勢(shì)與開(kāi)發(fā)研究