太陽能電板自動跟蹤系統設計研究
2018-09-20 03:16:32張春梅
價值工程 2018年29期
張春梅
摘要:本文是基于PLC的太陽能自動跟蹤系統設計, 利用四象限探測器采集光電信號,關于這個器件的具體應用將在下文做詳細介紹,然后通過自己設計的放大電路進行處理,放大電路設計方案也在下文給出,這就是為系統的信號接收裝置。①使用PLC作為控制核心,并且要巧妙的結合PLC的功能進行設計,充分發揮PLC的作用。②利用PLC和步進電機驅動器對步進電機進行控制。③利用光電編碼器對電池板的位置進行反饋,從而實現閉環控制。設計中最大的特點就是硬件系統比較簡單,成本低且容易獲得,另外還具有比較高的跟蹤精度。
Abstract: This paper discusses the design of solar energy automatic tracking system based on PLC. The four-quadrant detector is used to collect photoelectric signals. The specific application of this device will be described in detail below, and then processed by the amplifier circuit designed by ourselves. The amplification circuit design scheme is also given below, this is the signal receiving device for the system. ①Use PLC as the control core, and skillfully combine the functions of PLC to design and give full play to the role of PLC. ②Control the stepper motor with PLC and stepper motor driver. ③Use the photoelectric encoder to feedback the position of the panel to achieve closed-loop control. The biggest feature of the design is that the hardware system is relatively simple, low cost and easy to obtain, and has a relatively high tracking accuracy.
關鍵詞:四象限探測器;PLC;步進電機;光電編碼器
Key words: four quadrant detector;PLC;stepper motor;photoelectric encoder
中圖分類號:TM914.4 文獻標識碼:A 文章編號:1006-4311(2018)29-0146-03
0 引言
太陽能用途廣泛且為可再生資源,但是采集是難題,如何高效采集太陽能并合理利用是關鍵,目前太陽能采集裝置多是固定式影響采集效率,本文設計自動跟蹤裝置可有效提高太陽能采集量和利用率。光電式控制和四象限探測器采集到精準的跟蹤信號,將跟蹤信號送到控制器,通過PLC程序控制雙軸系統,此外使用閉環控制,進一步縮小誤差,提高跟蹤精度。優勢為一方面,本文設計跟蹤系統可以更好的跟蹤太陽精確采集,另一方面,系統硬件設計簡單節省成本。
1 系統硬件設計
該系統硬件結構主要由四部分構成,信號收集與處理、PLC處理、步進電機執行部分、反饋系統。
1.1 信號收集與處理
信號收集是由四象限探測器來完成的,它的主要器件是光電二極管。四象限探測器在光強下會產生光電流,但該電流太小,不易被區別,所以必須要有放大電路和處理電路,將電流信號放大后變成電壓信號,便于輸入到PLC中。該種探測器有很多類型其原理基本相同,優點是使用壽命都長,節省成本,響應速度快,從而提高系統的響應速度及時跟蹤太陽。
四象限探測器由四個光敏面構成,每一個面有一個輸出端口,外加兩個公共端,所以共6個輸出端口。
主要原理是:有四個象限,當有光照在這個探測器上時,由于光有能量,會激發探測器上的導體,使其產生電流,電流大小與光的強度有關。如果四個象限上的光強不一樣,則每一個象限上的電流就不一樣。通過這一原理,可以檢測電流大小來判斷光源位置電流大處光強。使用四象限探測器來跟蹤光束的方法是將探測器放入遮光桶中,這樣就形成了一個信號采集器。當太陽光從遮光桶的上部小孔進入后,會在遮光桶底部有一個斑點,這個斑點稱為光斑。當太陽正對著小孔時,光斑會和底部探測器的中心重合。如果不重合的話,則說明太陽不是正對小孔,即說明太陽發生了偏移,這時四個象限由于光強不一樣導致光電流不一樣,這樣就可以將電流經過運算后算出光斑的偏移量包括大小和方向。光斑的大小和遮光桶的高度將會影響系統的精度,這里所使用的光斑大小為探測器半徑的0.5倍,遮光桶的高度為1cm。
通過觀察兩個中心(光斑中心和探測器中心)是否重合得出太陽位置。如果重合說明太陽正對遮光桶小孔進而說明電池板正對太陽轉臺不需要旋轉;如果不重合,則說明太陽光不是垂直射入,此時可以用Δx表示光斑位置在X軸的偏移量,Δy表示Y軸的偏移量,這兩個偏移量表示太陽光在水平方向與俯仰方向的偏移量。如果用i1,i2,i3,i4分別表示探測器四個象限的輸出電流,i1=i2=i3=i4,表明中心重合,即Δx=0,Δy=0。因為輸出的短路電流非常小,所以要用放大電路處理成電壓信號,四個象限可以用u1,u2,u3,u4表示,用ux和uy表示水平和俯仰方向
運算放大電路的設計:從前面的分析,我們知道探測器的輸出信號為電流信號,并且這種信號很小,不能被PLC直接讀取,所以必須經過運算電路處理,處理后的信號屬于電壓信號,并且在PLC的識別范圍內,可以直接讀取。影響放大電路工作的一個很重要的因素就是噪聲。因此放大電路的設計主要原則就是要盡量減少噪聲,只有這樣才能得到比較準確的輸入信號。從前面的介紹知道,放大電路要包含2個內容,其中最重要的一個就是要把電流信號通過放大電路后變為電壓信號,另外就是要把放大電路設計的合情合理,一方面噪聲要比較低,另一方面就是要有比較高的精度。將電流轉變成電壓很簡單,加一只電阻就行了,但是電阻值要準確,另外電阻受熱時,變化值不能太大。為了降低噪聲,可以選擇精度比較高噪聲比較低的運算放大器電路圖1所示。
由公式可知放大后的電壓在PLC能接受的范圍5V內。由于中午太陽最強烈,但距離比較遠,所以最大電壓大概為2V。然而運算電路的放大倍數不能太大,輸出的電壓信號要符合PLC對電壓的要求。
和差與除法電路設計:根據前面的公式設計和差電路,假設信號放大后的四路電壓信號分別為u1,u2,u3,u4。經過和差運算后得到三路輸出信號,分別為ux和uy,外加信號總和usum。求差電路圖2所示。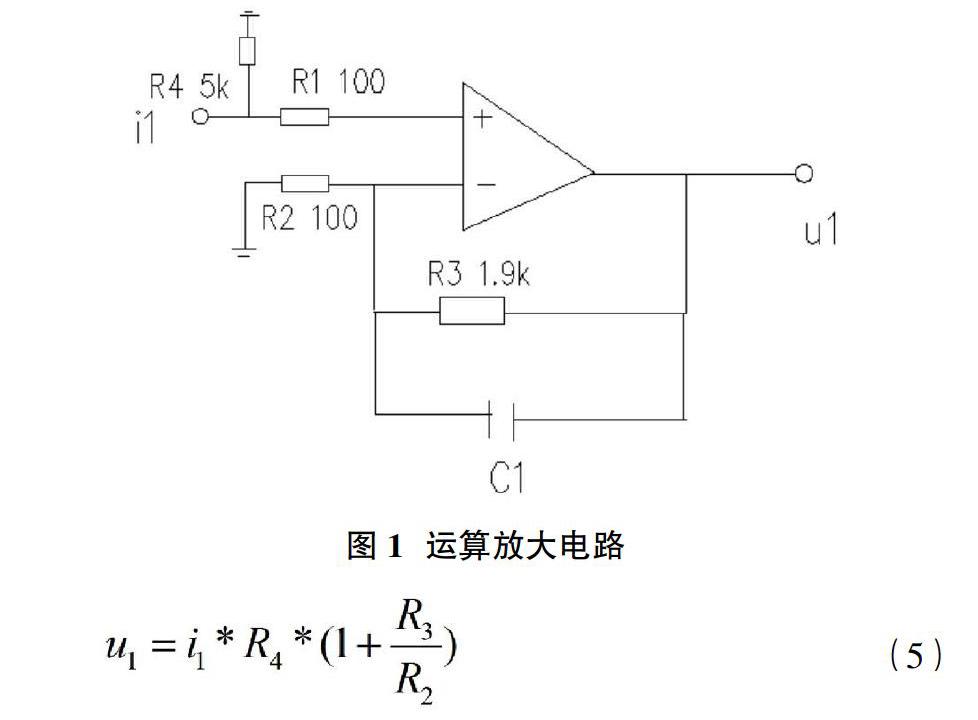
圖2表示的是ux,同樣也可以得到uy。另外,亦可以求得usum。
當各個和差電路都已經設計好后,剩下的就是除法電路了。除法電路主要是由四象限乘法器MC1494和OP07CP構成。MC1494為變跨導四象限模擬乘法器,參數特性如下所示:①具有了良好的線性性能;②電源典型輸入電壓為±15V;③輸入端(X/Y)最大誤差:±1%;④輸入電壓范圍:±10V;⑤具有可調節的比例系數K;⑥頻率響應(3.0DB小信號時):l.0MHz;⑦電源靈敏度典型值:30mV/V通過除法電路,便可以得到Hx和Hy,從而完成了信號采集和處理部分的內容。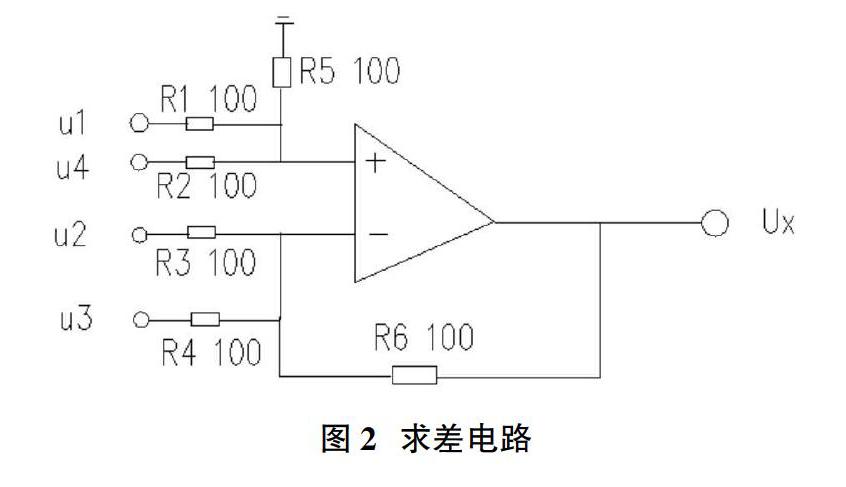
1.2 PLC系統
PLC是系統的核心部分,本系統選擇西門子PLC S7-200屬于小型控制器,S7-200系列具有很強的功能,負載電源是24V并且集成在內部,CPU 221,222具有180mA輸出,CPU 224,CPU 224XP,CPU 226分別輸出280,400mA。可用作負載電源。CPU從221到226每一種都有2個類型,他們的電源電壓不同,控制電壓也不相同。數字量輸入/輸出點:CPU 221:6個輸入點,4個輸出點;CPU 222:8個輸入點,6個輸出點;CPU 224:14個輸入點,10個輸出點;CPU 224XP:14個輸入點,10個輸出點;CPU 226:24個輸入點,16個輸出點;模擬量輸入/輸出點:CPU 224XP:2個輸入點,1個輸出點;高計數器:CPU 221/222有4個高速計數器,可以編程,其兩個輸入端具有同時計數不同方向的脈沖數,通過加減來完成。這兩個輸入端可以用來和相應的光電編碼器連接,另外這些高數計數器還具有復位輸入的功能。結合該系統所要實現的功能,本課題選擇了224XP。數字量輸入/輸出點:14輸入點,10輸出點;模擬量輸入/輸出點:2輸入點,1輸出點;擴展模塊:可連接7個擴展模塊;高速計數器個數:6個獨立的高速計數器(100kHz);脈沖輸出個數:2個100kHz的高速脈沖輸出通訊口個數:2個RS485通訊/編程口。
1.3 步進電機
步進電機是線性控制的,這樣的控制有一個很大的優點,那就是沒有累計誤差,也就是說這一步的誤差不會累積到下一步,這樣就不會使得誤差被逐漸放大。步進電機本身不能工作,必須要和驅動器配合才能工作,這樣的配合是通過脈沖來實現的,驅動器發出一個脈沖,步進電機就會轉過一個角度,這個角度有一個專業術語,叫步距角。因此我們很容易想到轉臺需要的旋轉角度可以利用步進電機來實現,即可以給步進電機一定的脈沖數,然后帶動轉臺旋轉。步進電機有一個致命的缺點,那就是它很容易發生振蕩,振蕩對一個電機來說是很危險的,振蕩嚴重的話可以直接毀掉電機。所以步進電機一定要和驅動器配合工作,因為驅動器可以減少步進電機振蕩的頻率和幅度,從而最大限度的保護步進電機。細分技術在驅動器的應用可以有效降低振蕩的產生,從而保護電機的安全。西門子PLC與DM432C相連接,PLC輸出端口Q0.0和Q0.2分別為水平和俯仰方向的脈沖輸出端口,這兩個端口分別連接兩個驅動器,每一個驅動器有兩個輸入端口,所以它們的另外一個端口分別與Q0.1和Q0.3連接,Q0.1與Q0.3是方向信號端口。
1.4 反饋環節
本系統反饋環節是通過光電編碼器完成的,加入反饋環節可以及時對步進電機轉過角度進行有效的校正,減少誤差,從而提高自動跟蹤系統的精度。光電編碼器結構簡單,使用壽命很長,并且抗干擾能力也很強,可靠性比較高。本系統使用的編碼器型號為R3888G0524。
2 總結
本文是基于PLC的太陽能自動跟蹤系統設計利用四象限探測器采集光電信號。
①利用光電跟蹤方式對太陽進行追蹤,另外使用雙軸進行兩個方向的跟蹤,雙軸跟蹤彌補了單軸追蹤的不精確,四象限限探測器用來接收光信號,實現對太陽的定位,它價格便宜,所以性價比比較高。
②使用PLC作為控制核心,并且要巧妙的結合PLC的功能進行設計,充分發揮PLC的作用。
③利用PLC和步進電機驅動器對步進電機進行控制。
④利用光電編碼器對電池板的位置進行反饋,從而實現閉環控制。設計中最大的特點就是硬件系統比較簡單,成本低且容易獲得,另外還具有比較高的跟蹤精度。
參考文獻:
[1]呂生強.四象限探測器的激光探測與定位研究[D].江蘇:南京理工大學,2006.
[2]馮龍齡,鄧仁亮.四象限光電跟蹤技術中若干問題的探討[J].紅外與激光工程,1996,25(1):16-21.
[3]張嘉英.光伏發電自動跟蹤系統[D].內蒙:內蒙古工業業大學,2006.
[4]黨麗萍.象限探測器的輸出特性及優化[J].光電工程,2010,37(1):1-6.
