人工智能模擬大腦導航密碼
2018-09-26 08:05:54編譯李升偉
世界科學 2018年9期
編譯 李升偉
一種稱為深度學習的人工智能技術目前正在用來模擬空間導航,這種人工智能系統建立了一種空間的表現,類似于在哺乳動物大腦內發現的網格細胞。

深度學習是一種人工智能方法,它的靈感來自大腦神經網絡。由于這種技術的貢獻,催生了一系列的技術,從自動化視頻分析到語言翻譯。在《自然》雜志的一篇在線論文中,巴尼諾(Banino)等人使用這種框架獲得了關于真實生命神經網絡的新認識,尤其是關于空間的幾何常規表示方法是如何促進靈活的導航策略的。
可以訓練深度學習網絡怎樣從輸入得到特定的輸出,例如,學會從許多張不同人的照片中識別一幅特定的臉形。深度學習網絡由重復計算單元的連續層次組成,每個單元接收來自前一個層次的相似單元的輸入,然后向下一個層次發送輸出。從數學上來說,這樣一個網絡可以被視為一種高維函數,可以通過改變一層的輸出在下一層的加權情況來調節。
在訓練階段,網絡對函數進行了調整,這通常依賴于一組輸入-輸出示例。例如,一個深度學習系統可能瀏覽了一系列相片,并知道哪張相片包含有它想要識別的臉形。深度學習系統的權重可以通過優化算法自動調整,直到其學會正確識別。深度學習網絡具有驚人的能力:能認出和利用在例圖中重復出現的最有用的容貌特征和模式,能區別不同的臉形。但深度學習網絡的一個缺點是:最終的網絡往往是一個黑箱,在訓練過程形成的計算方案經常不能從各層之間分配的無數權重中得到解釋。
深度學習網絡可以成功地執行感知任務,但對如同導航這樣的復雜行為任務還研究甚少。現實生活中導航的一個關鍵方面是通過根據方位和旅行距離計算每一步的位移來估計每一步之后的位置,這個過程稱之為路徑整合。神經科學家、認知科學家和計算機科學家認為,這個過程對生成環境的認知地圖至關重要。有幾種神經元與大腦的認知地圖相關聯,包括位置細胞和頭部方向細胞,前者在生物體占領了環境中一個特定位置時會激活,后者標志著頭的方向。
第三種神經元,即網格細胞,當動物處于環境中形成六角形網格模式的任何一個點時,它就會發出信號。一般認為:網格細胞是具有幾何屬性的認知地圖,有助于規劃和跟蹤軌跡。這些細胞存在于大腦的海馬體,在人腦內,海馬體負責空間學習、自身記憶和關于世界的一般事實的認知。
巴尼諾等人期望在深度學習網絡中生成路徑整合。因為路徑整合涉及到記住以前處理步驟的輸出,將其作為下一個處理步驟的輸入,作者使用了一個包含反饋回路的網絡。他們通過模擬覓食鼠類路徑來訓練網絡。此系統接收了如下的信息:模擬鼠類的線性速度和角速度,關于位置細胞和方向細胞的模擬活動;后者可以看作鼠類目前位置和頭部方向的“預言”。
作者發現,在訓練期間,類似網格細胞的活動模式自發地出現在網絡中間層內的計算單元內,盡管網絡或訓練協議內沒有明確這類模式。類似網格單元的出現是令人印象深刻的例子,說明深度學習在做其最擅長的事情,即發明一個原始、經常是不可預測的內部表示來幫助解決任務。
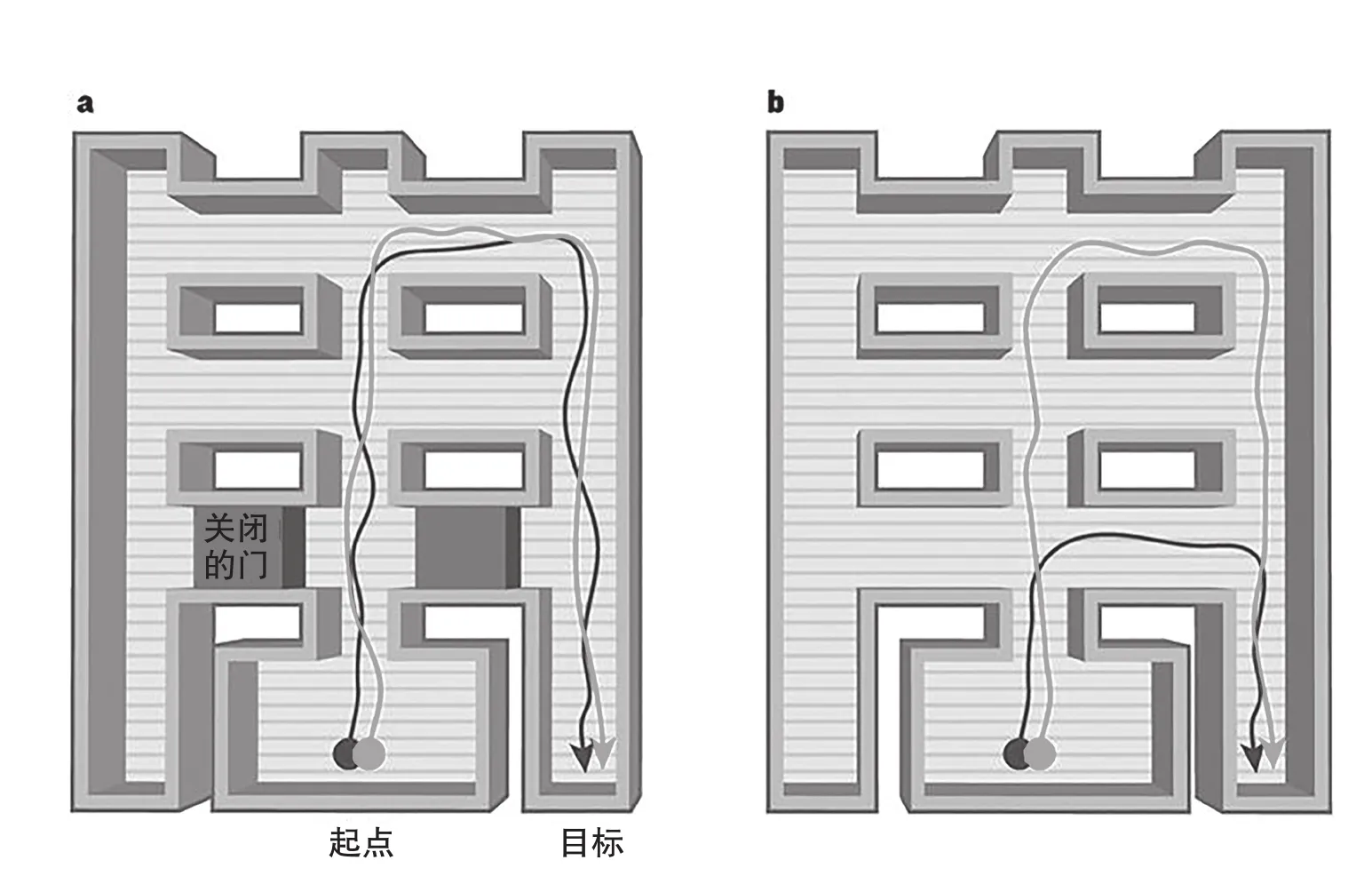
人工智能系統學會走捷徑 在哺乳動物大腦中,位置細胞在動物處于某環境內特定位置時激活,頭部方向細胞在頭部處于某個特定方向時激活,而網格細胞則在動物在環境中形成六邊形網格時激活。巴尼諾等人訓練了一種稱為“深度學習網絡”的人工智能系統來進行導航,通過向其提供鼠類覓食方式的模擬來訓練,包括訓練位置細胞和頭部方向細胞的活動。網絡內的一些計算單元建立起了類似網格細胞的激活方式(沒有顯示)。a,當學習向某個目標進行導航時,使用網格細胞的系統(黑線表示一種樣本路徑)和使用位置細胞和頭部方向細胞的系統(灰線)采用的是相同的路徑。b,但是當導入捷徑時,例如打開了以前關閉的門時,只有使用網格細胞的系統發現了較短的路線,彰顯了類似網格細胞的活動改善靈活導航策略的能力
類似網格的單元可以使網絡在路徑整合的基礎上保持對位置的跟蹤,這樣的單元能否幫助深度學習系統學會有效地從其目前位置導航到目標位置呢?為了解決這個問題,巴尼諾等人添加了一個強化學習元件,使得深度學習網絡學會賦值給特定位置的特定動作。作為獎勵,更高的值賦與使模擬鼠類更接近目標的動作。類似網格的表示顯著改善了網絡解決目標定向任務的能力,優于起始和目標位置由位置細胞和方向細胞編碼的對照模擬。當諸如關閉的門等障礙物被移除時,經過訓練的網絡會發現捷徑,甚至能夠在以前未被探索過的熟悉環境的附件內推測達到目標的路徑。這些結果支持這樣的觀念:網格細胞使大腦能夠執行矢量計算(關于路徑的長度和方向的計算),以幫助在以前未被探索的環境中進行路徑規劃。
將來,作者的深度學習網絡可用來探索網格細胞和位置細胞之間相互作用的后果。在目前的網絡內,模擬的位置層在訓練期間并不發生改變。但是,在大腦內,網格細胞和位置細胞彼此相互影響,其途徑還未被充分認識。盡管在缺乏網格細胞輸入的情況下,真實生命的位置細胞可以保持對空間的選擇;但是,當動物遠離可用于定義位置的外部標志時,這些輸入似乎會很重要。在這些情況下,位置細胞依賴路徑整合,而網格細胞則保持對位置的精確估計。通過建立這樣的網絡,使得位置細胞層可以受到類似網格輸入的調控,我們可以開始認識位置細胞與網格細胞的關系。
從更廣義的視角來看,如下的方面是非常有趣的,即深度學習網絡可以發現類似大腦的路徑整合的解決方案,該解決方案來自非常普通的計算假定,不考慮特定的生物學機制。網絡集中于這樣一種解決方案是令人信服的證據,表明網格細胞活動模式存在一些特殊之處,支持路徑整合。但是,深度學習系統的黑箱特性意味著可能會很難確定那些特殊之處是什么。
同樣地,網格表示增強了目標定向的事實,令人信服地證明了大腦內網格細胞的作用的概念。但是,作者必須使用相關性分析,以定性的直覺為指導,間接推斷出網絡正在進行向量計算。由于在模型內無法直接操作這些計算,使得研究網格細胞成為有效導航方案的計算原理、算法和編碼策略變得困難。因此,理論家最終陷入了與實驗主義者同樣的困境:試圖將一個不太為人所了解的復雜體系拆開來理解它。使深度學習系統更能理解人類推理是未來一項令人興奮的挑戰。
資料來源 Nature
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
商界(2019年12期)2019-01-03 06:59:05
IT經理世界(2018年20期)2018-10-24 02:38:24
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
家庭影院技術(2017年9期)2017-09-26 03:41:45