換流站閥廳智能巡檢機器人系統設計及應用
2018-09-26 03:11:44楊壽源楊春歡楊家凱王榮富晏慶豐
電力安全技術 2018年8期
沈 燚,楊壽源,楊春歡,楊家凱,王榮富,侯 詩,晏慶豐
(云南電網有限責任公司楚雄供電局,云南 楚雄 651400)
0 引言
直流輸電是目前各國解決高電壓、大容量、遠距離送電以及電網互聯的重要手段之一。特高壓直流換流站是完成交流變直流或直流變交流的重要站點。我國從2003年8月開始對±800 kV特高壓直流輸電技術進行研究,并于2010年首次將復龍及奉賢2個特高壓換流站投入使用。
傳統的換流站巡檢方式有人工巡檢和固定點監控,人工巡檢存在巡檢人員責任心難保證、高電壓和強輻射環境威脅人身安全、設備種類多、工作量大、巡檢人員專業技能不一、難以保證覆蓋率和準確率等缺陷;固定點巡檢存在監控死角、依賴人工監管、無法預警缺陷等問題。因此這2種方式都存在天然缺陷,難以滿足換流站科學化運維管理要求。
針對以上問題,研發了換流站閥廳智能巡檢機器人系統。該系統以環境感知云臺為硬件依托,通過自動讀取閥廳中的設備溫度、儀表讀數、開關分合狀態等狀態信息,結合故障診斷專家系統自主判斷異常并報警。另外,后臺管理系統能采集、存儲、分析、預測閥廳設備及自身設備狀態并生成日志,擁有良好的人機交互體驗。
1 系統結構
換流站閥廳智能機器人巡檢系統,以軌道式巡檢機器人為核心,結合移動平臺、固定平臺及智能分析軟件,可代替同一直線區域內的多個固定監控設備。通過智能分析、任務巡查、統計報表等功能的有機結合,將巡檢、監控過程智能化、標準化,以簡單的方式體現“機器替代人”的價值。換流站閥廳智能機器人巡檢系統具備如下幾個功能:
(1) 機器人美觀、體積小,可在閥廳內有限安全距離空間自由運動;
(2) 機器人垂直升降高度可達20 m,能滿足該閥廳內閥塔設備的巡檢范圍要求;
(3) 閥廳機器人系統由前端機器人設備及后臺管理軟件組成,實現對閥廳設備的自動巡檢;
(4) 系統熱缺陷的自動診斷功能,可對電力設備的溫度進行精確測量并進行診斷;
(5) 系統實現巡檢數據報表生成,各種預警信息推送報警等功能。
換流站閥廳智能巡檢機器人系統包括監控系統及管理平臺,如圖1所示。其中,監控系統與管理平臺通過網絡進行通信和數據交互。
監控系統由閥廳外置總控制箱和多個閥廳內監控點組成。總控制箱包含供電單元、狀態指示單元、通信單元。總控制箱控制各監控點巡檢機器人實現自主監測,并接收管理平臺的指令,實現遠程控制監控點巡檢機器人作業。閥廳內各監控點數量、種類由實際環境及需求決定,由總控制箱供電,并通過光纜與總控制箱建立通信。監控點分為固定式和移動式,含有前端控制箱、雙視云臺以及各類線路,其中移動式監控點含有軌道系統。監控點置有巡檢機器人,巡檢機器人搭載可見光、紅外、音頻采集等信息采集終端,支持水平及垂直軌道運行,通過管理后臺對采集終端采集的信息進行智能化分析,實現閥廳自動化巡檢。
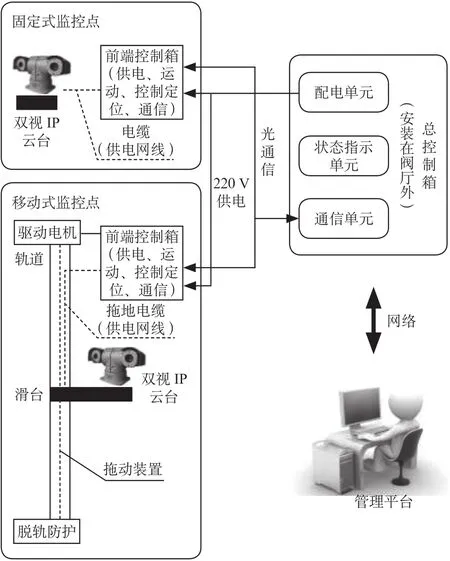
圖1 系統結構
管理平臺為擁有故障診斷專家系統的軟件平臺,起著大腦中樞的功能。該管理平臺具備遠程操控閥廳內監控點巡檢機器人運行的功能,同時能夠對巡檢機器人采集的多類型數據進行顯示、處理、分析,擁有缺陷自動分析等多種功能。
2 監控點巡檢機器人
2.1 巡檢機器人
巡檢機器人為多傳感器集成的云臺系統(如圖2所示),搭載有紅外測溫儀、攝像頭、拾音設備、喇叭、補光設備等,可采集視頻信息、紅外信息、音頻信息。該巡檢機器人的巡檢范圍很大,軌道長度可根據實際現場環境定制,云臺垂直運動范圍在-45°—90°,水平運動可做到360°連續旋轉。
巡檢機器人通過紅外測溫儀對直流配電場配電裝置斷路器、隔離開關、套管、換流變壓器、平波電抗器、交直流濾波器、閥冷卻系統、換流閥晶閘管、TVM板等進行紅外測溫。通過攝像頭能可靠識別閥廳內的儀表、刀閘、開關、設備外觀等,全面掌握閥廳內電力設備狀態。通過拾音設備采集環境設備運行聲音,對環境音頻進行可視化展示。同時,管理平臺可通過機器人向現場進行音頻廣播,可播放預定的警示音頻,可實時喊話,實現遠程語音報警及語音指導,令巡檢機器人具有雙向語音功能。
巡檢機器人會將采集到的各類型數據實時通過光纜傳輸至總控箱,由總控制箱作為中轉,采用網絡傳輸的方式,將數據發送至管理平臺進行后臺處理分析。同時,巡檢機器人接受管理平臺的多方式控制,實現多模式的巡檢功能。

圖2 巡檢機器人
2.2 巡檢機器人多模式巡檢
換流站閥廳內設備儀器眾多、排布緊密,并且對設備的安全要求較高,因此只有巡檢機器人以一種靈活自如、方便可控的巡檢模式進行巡檢作業,才能滿足換流站閥廳的巡檢任務要求。故本智能巡檢機器人系統采用多模式混合的方式進行巡檢作業,在保證持續工作時間長、巡檢覆蓋面積廣的基礎上,仍可做到精確檢測、遙控檢測等靈活度高的檢測方式。
換流站智能巡檢機器人系統采用多模式巡檢方式進行巡檢作業。巡檢機器人分為固定式和移動式2種。固定式巡檢機器人用于對情況復雜、需時刻監控的設備進行針對性的監控;移動式巡檢機器人用于大范圍的設備監控。2種巡檢機器人均具有自動巡檢、遙控巡檢模式。自動巡檢模式為通過預設巡檢內容和啟動時間,巡檢機器人定時、自動執行巡檢任務,并自動將巡檢結果生成統計報表。巡檢機器人同時也具備遠程遙控巡檢功能,在該模式下,操作人員通過管理平臺遠程控制任意巡檢機器人到達特定的位置,執行巡檢任務。為了保障巡檢機器人在環境復雜的閥廳中的運行安全和穩定,巡檢機器人具備自主避障功能,在行進過程中如遇到障礙物能夠及時停止,在全自主模式下障礙物移除后能夠恢復行進。
在以上巡檢模式的基礎上,巡檢機器人采用普測與精測相結合的方法進行檢測作業。即,先采用普測方法對閥廳內各設施進行檢測,當檢測到某一位置數據異常時,在該位置進行較長時間的連續檢測,實時監控事故位置,并開啟報警系統,提醒操作人員進行維修等作業。
3 智能故障診斷專家系統
傳統故障診斷專家系統由知識庫、數據庫、解釋器、推理機、綜合數據庫和人機界面等組成,其結構如圖3所示。
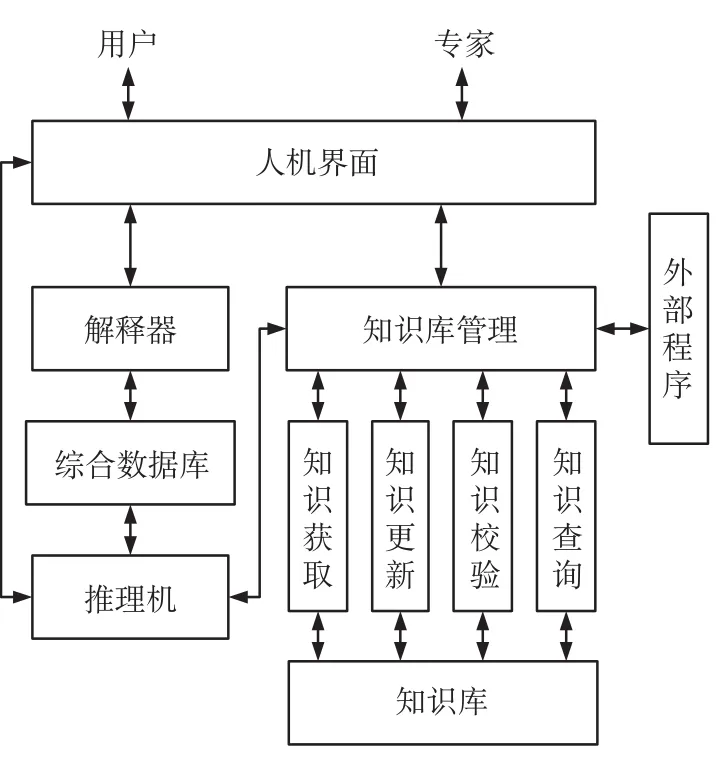
圖3 傳統故障診斷專家系統結構
知識庫是專家系統的核心,傳統的專家系統通過將大量概念、方法、事實和關系分類整理,建立故障樹,將專家知識層次性的表達出來,通過一定的方法,如框架表示法、面向對象知識表示法、謂詞邏輯表示法、語義網絡表示法、產生式規則表示法等轉化為規則,而后再轉化為計算機代碼存儲起來,形成知識庫(字典)。系統運行中將實際狀況通過正向推理機制與知識庫中數據對比,繼而判斷故障。但是考慮工程實際,閥廳環境為復雜非結構環境,同樣外在表現的故障可能其內因不同,并且癥狀和原因多存在交叉,無法建立清晰的故障樹;故傳統的專家系統無法滿足實時狀態檢測和診斷的需要,并且存在不確定推理更新和維護不便等問題。
3.1 新型知識庫的建立
本系統在傳統的專家系統中加入人工神經網絡,其系統結構如圖4所示。該系統發揮2者的優勢,設計了包含傳統的顯式知識庫和基于BP神經網絡的隱式知識庫的新型知識庫。通過BP神經網絡將維修工程師和維修技師的大量實際診斷和維修經驗以結點和閾值的方式存儲在神經網絡中,再通過樣本訓練,組成隱式知識庫,能較好地模擬專家憑借經驗和直覺完成不確定性診斷推理的過程。另外,通過不斷對新故障的迭代學習,不斷增強知識庫的完整性,克服了傳統專家系統中存在的“知識窄臺階問題”。
3.2 智能人機交互
人機交互界面(human-computer interface,HCI)是人—機—環之間交流信息的重要接口。變流站閥廳中機器較為龐雜,所需傳遞信息較多,這就要求人機界面能短時間內將最重要信息傳達給用戶,進而做出迅速而準確的反應。因考慮視覺注意機制在人機交互中的重要作用,將約80 %的信息以圖像形式顯示于人機界面,有利于提高用戶信息處理能力,降低疲勞。
人機界面主要分為4部分:
(1) 二維電子地圖,實時顯示機器人在電子地圖上的位置,可實時記錄、下傳、導出,可在電子地圖上根據任務標定機器人巡視路線在任務中實時反映任務進度;
(2) 實時顯示熱成像圖像和高清圖像;
(3) 當前任務狀態信息,包括當前巡檢點、已巡檢點、機器人本體當前狀態(位置、速度、云臺位姿、相機當前倍數);
(4) 報警信息(報警機器人、報警內容、報警值、報警位置、報警時間以及相應操作)。
本系統對最為重要的報警模塊進行如下設計:通過環境感知云臺獲取閥廳內設備運行狀態;通過紅外相機獲取致熱性設備溫度數據;通過高清相機獲取設備外觀、開關分合狀態、各種儀器儀表讀數等;通過高清拾音器獲得周圍環境音頻數據。將收集到的信息與專家系統中閾值相比對,自動識別異常并報警顯示;系統支持通過有線網絡將音視頻信息存儲于服務器并能轉發至各客戶端。系統支持歷史數據統計與趨勢分析,生成日志以供查看,能夠提前預測閥廳可能出現的設備故障和運行環境缺陷,并及時發出預警信息通知后臺管理人員。另外,系統支持雙向語音對講,能滿足站內人員與控制臺人員對講。
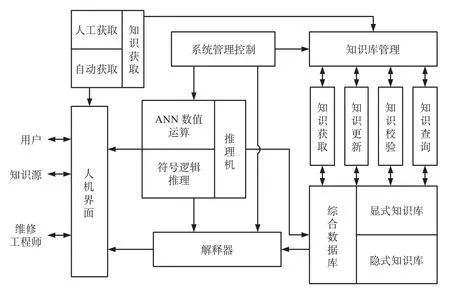
圖4 融合人工神經網絡的專家系統結構
4 可靠性設計
考慮到本系統應用于系統龐雜、設備多樣、電磁干擾強的換流站閥廳中,因此,對本系統有較高的可靠性要求。本換流站智能巡檢機器人系統能夠在如表1所示的環境中工作。
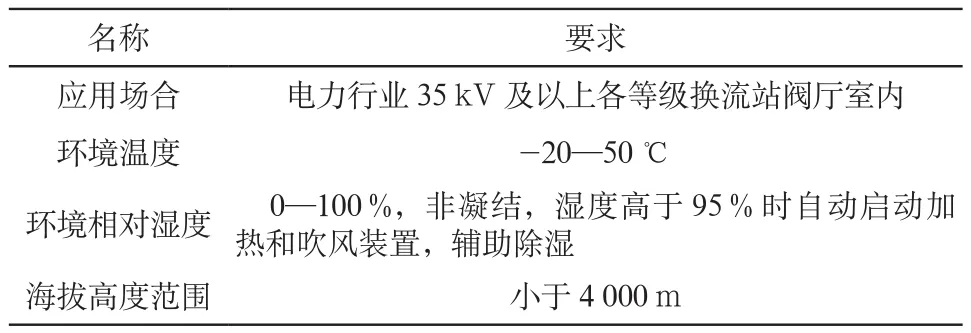
表1 工作環境要求
為了實現以上要求,在系統研制、硬件選擇上充分考慮了環境的復雜性因素,如表2所示。
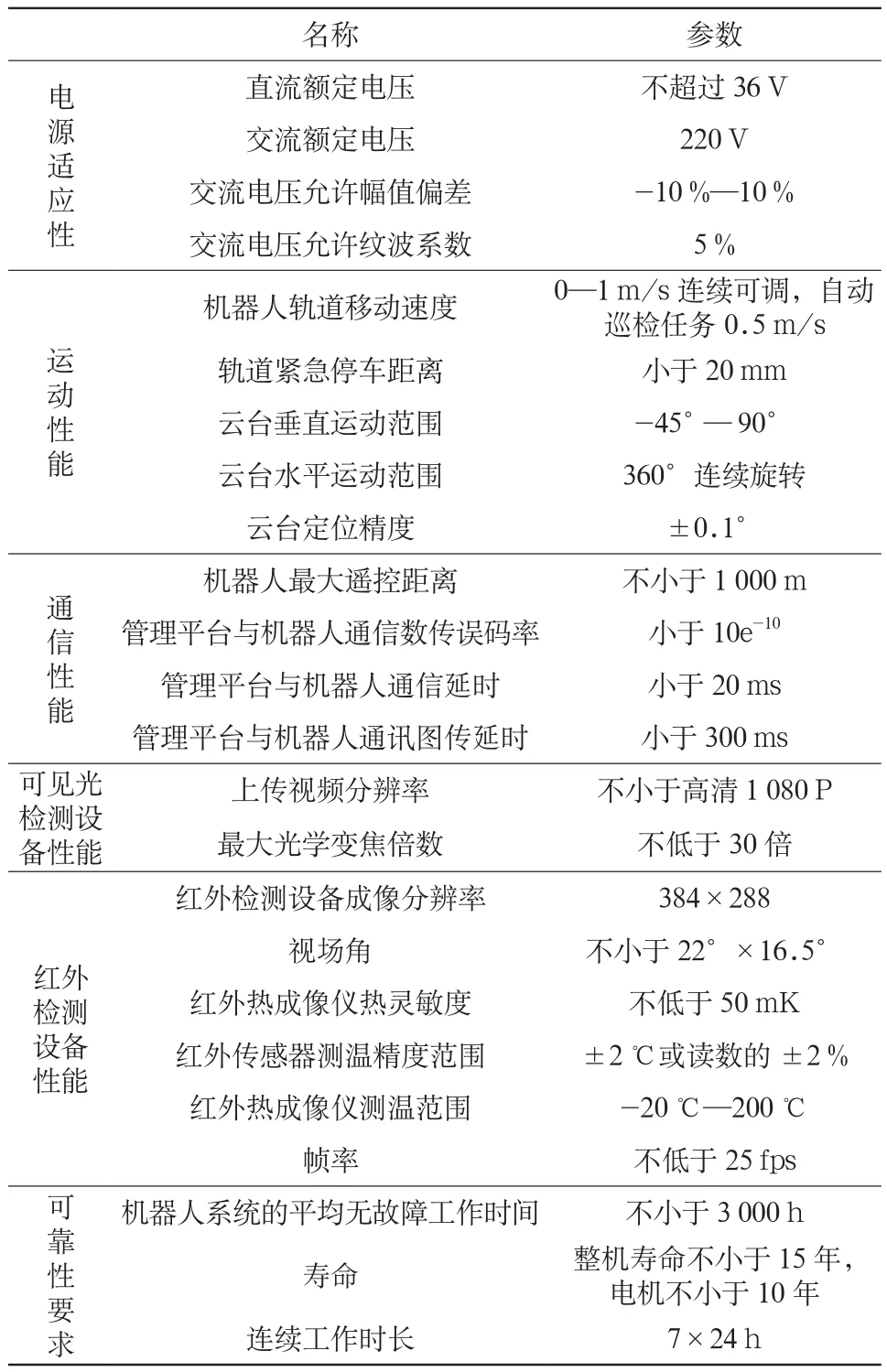
表2 性能參數
5 應用效果
在調試檢驗階段,分別調試檢測:設備熱缺陷(人為制造)、開關分合狀態、設備外觀異常以及儀表讀數的識別(開關閉合異常用于測試巡檢系統的可見光部分的檢測功能)。該巡檢系統均能準確檢測并在監控后臺報警反饋,沒有誤報錯報情況,與設計預期相吻合。系統制定有定期維護制度,工作人員每月和每季度對機器人系統進行不同范圍的維護工作,包括檢查機器人的傳動導軌的污損、設備灰塵清理、螺絲緊固、線路松動處理、數據庫維護等。
在線巡檢機器人常規設置是每天定時自動巡檢4次,也可以在后臺操作機器人實現臨時定點檢查設備狀態。雖然有了智能巡檢機器人的自動巡檢工作,但不能完全替代人工的工作。操作人員在后臺監管系統的運行,對機器人巡檢過程中發現的不確定問題進行確認,必要的時候需要進入閥廳人工巡檢通道進行察看。機器人的投入,使工作人員進入高電磁環境的頻率和作業時間大幅降低,不必要時無需再進行人工巡檢。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
電子制作(2018年11期)2018-08-04 03:26:08
家庭影院技術(2017年9期)2017-09-26 03:41:45
