電網不平衡下三電平逆變器無差拍控制
2018-09-29 03:07:42田世潤
實驗室研究與探索 2018年8期
關鍵詞:方法
馬 蕾, 田世潤
(1. 鄭州鐵路職業技術學院 電子工程系, 鄭州 450018; 2. 蘭州交通大學 機電技術研究所, 蘭州 730070)
0 引 言
近幾年來,隨著光伏發電、風力發電和儲能等分布式能源的快速發展,并網逆變器以及雙向變流器得到廣泛的應用[1-3]。但是也出現了一些新問題,例如當電網故障時,變流器的輸出性能會受到一定的影響,而電網電壓不平衡是比較常見的電網故障。當電網不平衡時,如果采用傳統的控制方法,并網電流將出現畸變或者二倍頻波動等問題。
文獻[4]中采用正負序旋轉坐標系下的比例積分控制器,雖然該方法能夠實現無靜差跟蹤和有功功率和無功功率的控制,但是該方法需要正負序分離,計算量很大,而且正負序分離帶來的計算延遲影響了控制的響應速度。文獻[5]中采用靜止坐標系下的比例諧振控制器,對交流電流實現無靜差控制,不需要正負序分離,能夠抑制電網的二倍頻波動。文獻[6]中提出一種電流預測控制方法,該方法沒有比例積分控制器,提高了電流的響應速度,但是,由于控制周期和采用周期的不同步會影響電流跟蹤精度。
無差拍控制器因具有動態響應快和控制精度搞和實現簡單等優點得到了廣泛應用[7-10]。因此,本文設計一種無差拍控制器,實現電網不平衡條件下的并網電流控制。首先在不平衡條件下,建立數學模型,提出無差拍控制器消除交流分量,實現電網不平衡條件下并網電流準確跟蹤控制。實際系統中,電流采樣和電網采樣存在延遲誤差,為了抑制延遲誤差對并網電流跟蹤的影響,本文并提出一種拉格朗日預測方法,消除延遲造成的影響。
而且,三電平逆變器存在上側電容電壓和下側電容電壓不相等的情況,控制不當會引起并網電流畸變和燒壞IGBT[11-16]。因此,中點電位平衡控制是三電平逆變器穩定運行的前提。目前中點平衡控制方法包括兩種:① 空間矢量調制方法;② 注入零序分量控制方法。注入零序分量控制實現簡單,故本文提出一種雙調制波的注入零序分量方法,實現中點電位平衡控制。
1 不平衡條件下光伏發電系統模型分析
圖1為NPC三電平逆變器的拓撲結構,以逆變器的中點O1為參考點,根據基爾霍夫定理能夠得到NPC三電平逆變器的數學表達式為:
(1)
式中:Ua、Ub、Uc為NPC型三電平逆變器的相電壓;ea、eb、ec為電網電壓;ia、ib、ic為三電平逆變器的并網電流;uo為電網電壓o和o1之間的電壓;L為NPC型三電平逆變器輸出濾波電感。
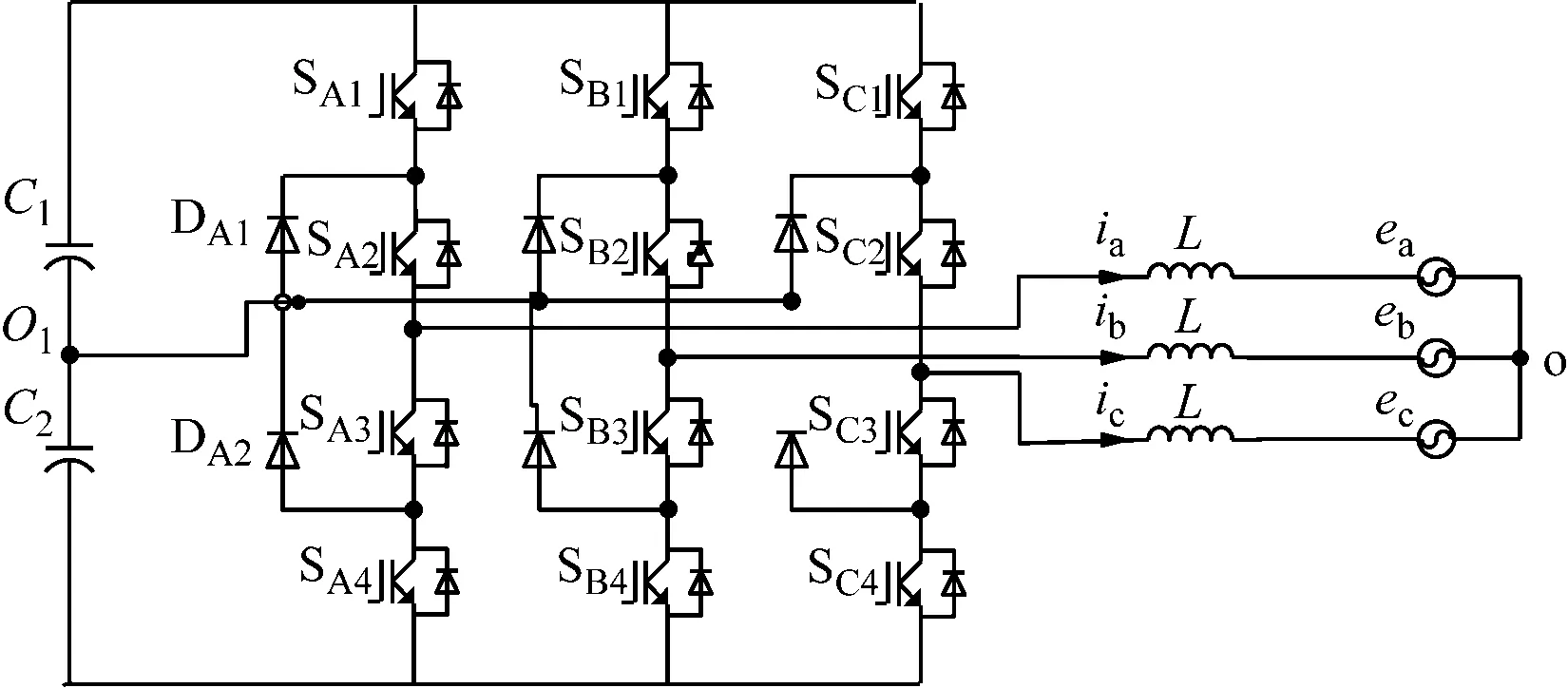
圖1 NPC型三電平并網系統
在三相并網逆變系統中,采用clarke變換能夠得到三電平并網逆變器在靜止坐標系下的數學模型為:
(2)
(3)
在電網不平衡條件下,NPC變流器的復功率能夠表示為:

(4)
將有功功率和無功功率表示為:
p=Re(s),q=lm(s)
(5)
2 不平衡條件下NPC變流器并網電流控制
電網不平衡條件下,三電平光伏并網逆變器需要抑制負序電流,將其控制為零,因此,三電平并網逆變器的正序電流能夠表示為:
(6)
在電網不平衡條件下,將式(1)的并采集電網電壓和并網電流離散化,并將式(3)中給定電流代入:
(7)
將參考矢量代入到空間矢量調制,實現中點電位平衡控制。
友好的歡迎和支持總是能讓我們倍感溫暖。在皮蘭,當地政府批準我們駕駛那些跑車進入原本禁止游客車輛進入的中心廣場,我們在那里瞬間成為了所有人關注的焦點。起初,我還自作多情地以為那里的游客是為我們這些“有錢人”而來,但過了一段時間我才意識到,他們真正感興趣的只是那幾輛跑車而已。在那里,我們聽到最多的話就是:“不好意思,稍微靠邊一點好嗎,順便幫我和這輛車拍張合影吧?”
(8)
3 不平衡條件下NPC三電平變流器中點平衡控制技術
在不平衡電網條件下,本文選擇直流側的負極為參考點,能夠得到輸出線電壓和開關之間的關系為:
(9)
式中,sx=2,1,0,x=a,b,c。
在光伏發電系統中,NPC三電平逆變器的矢量圖如圖2所示。NPC三電平逆變器包括27個矢量,其中包括6個小矢量,6個中矢量,6個大矢量以及1個零矢量,其中小矢量存在6個冗余矢量,零矢量存在2個冗余矢量[7-10]。
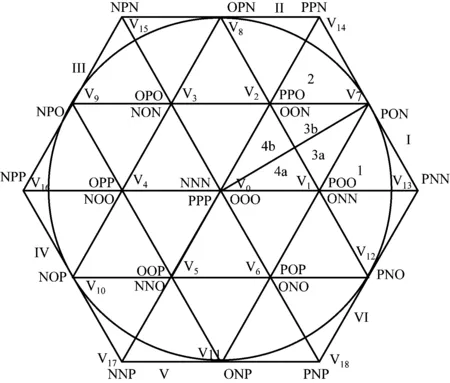
圖2 三電平逆變器空間矢量圖
NPC型三電平光伏并網逆變器的矢量和中點電位電壓之間的關系如表1所示。
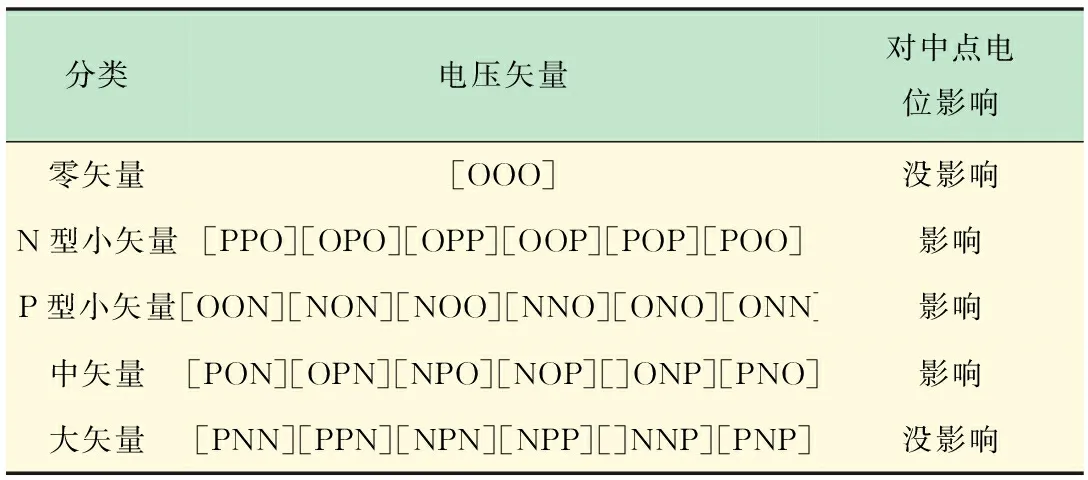
表1 矢量和中點電位之間關系
NPC型三電平光伏并網逆變器的參考矢量Uref表示為:
(10)
假設參考矢量位于I扇區3小區時,為了能夠更少地減少開關損耗,本文采用U1,U7和U13矢量,其作用時間分別為t1,t2和t3。從而能夠得到電壓矢量和作用時間之間的關系為:
(11)
電壓矢量U1,U7,U13作用時間能夠表示為:
(12)
為了消除中點電位振蕩,本文采用的算法是通過電壓矢量合成新的參考矢量,合成新的矢量為虛擬矢量,虛擬矢量作用時間之和為0。
零矢量和大矢量不影響中點電位,因此不考慮其對中點電位的影響。US1和US2為虛擬小矢量,UM1為虛擬中矢量。虛擬小矢量和虛擬中矢量分別為:
(13)
然后計算每個虛擬矢量的作用時間TS1,TS2和TM1。
完成中點振蕩算法以后,需要對其進行中點偏移控制。本文采用N型小矢量和P型小矢量實現中點平衡控制。其中P型小矢量完成上側電容電壓減小,N型小矢量完成下側電容電壓減少。
4 仿真結果
為了驗證電網不平衡條件下光伏發電系統控制算法的有效性,本文在Matlab/Simulink仿真平臺中搭建了一臺光伏發電系統,仿真參數如:電網電壓ea(220 V),eb(100 V),ec(100 V),濾波電感2 mH,濾波電容15 μF,母線電容2 mF,開關周期Ts=100 μs,額定功率10 kW,開關頻率5 kHz,并網電流給定50 A,80 A。
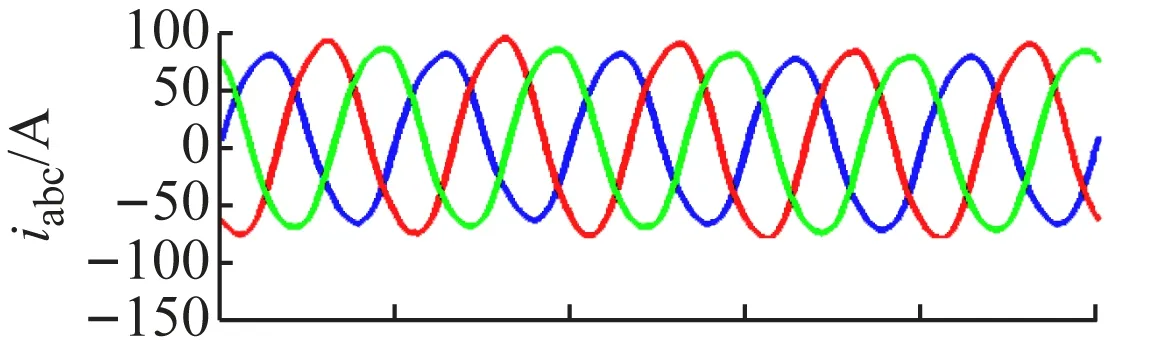
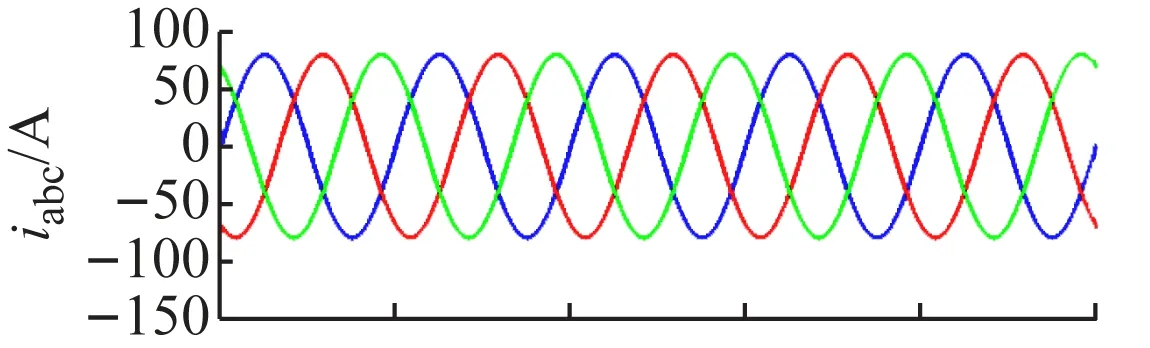
圖3為B相電壓跌落的情況,光伏給定并網電流為80 A,采用傳統PI方法和提出無差拍控制方法對比波形圖。由圖中能夠明顯看出,采用傳統方法的并網電流波形發生畸變,然而采用提出無差拍控制方法的電流波形得到明顯改善。
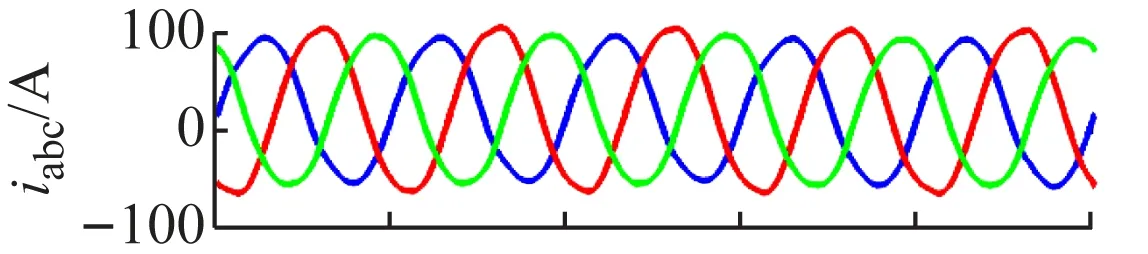
(a) 采用傳統PI方法
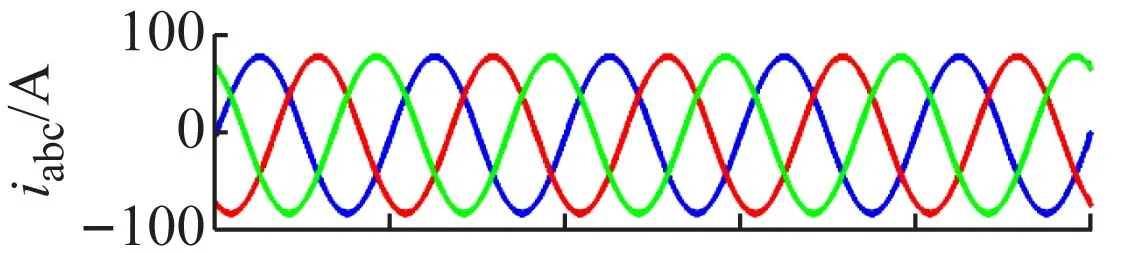
(b) 采用提出無差拍方法
圖4為B相跌落情況下采用提出方法的中點平衡波形,由圖中可以看出,中點波形得到明顯控制,線電壓為標準的五電平波形。
圖5為電網電壓C相和B相同時跌落的情況,電網電壓為ua=220 V,ub=uc=100 V。光伏并網逆變器給定電流為id_ref=80 A。通過仿真能夠看出,傳統方法的并網電流波形THD較大,然而采用提出無差拍控制方法的THD較小。
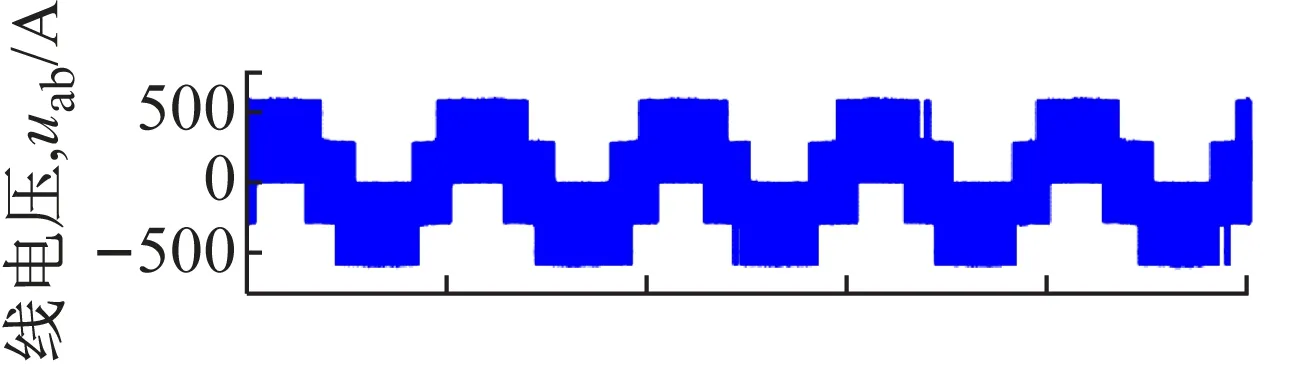
圖4 B相電壓跌落情況下光伏并網逆變器中點電位和線電壓仿真結果
(a) 采用傳統PI方法
(b) 采用提出無差拍控制方法
圖6為C相和B相同時跌落情況下采用提出方法的中點平衡波形,由圖中能夠明顯看出,中點波動很小,線電壓為標準的五電平波形。
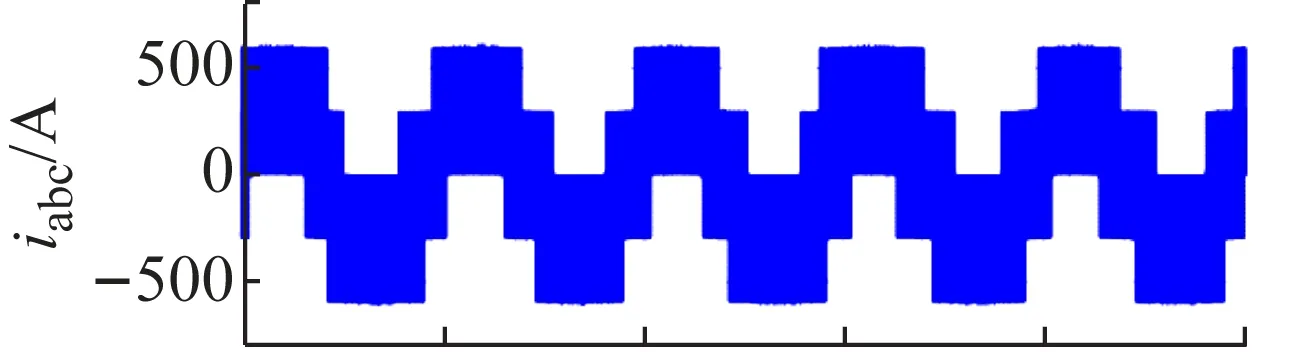
圖6 C相和B相電壓跌落情況下光伏并網逆變器中點電位和線電壓仿真結果
圖7為C相和B相同時跌落情況下光伏并網逆變器并網電流跳變波形,給定電流從40 A跳變到80 A。采用本文提出無差拍控制方法后,能夠快速地跟蹤給定電流變化。
5 結 語
針對NPC三電平光伏并網逆變器,本文提出一種電網不平衡條件下的無差拍控制方法,能夠有效地消除電網不平衡造成的二倍頻分量,而且能夠快速地跟蹤并網電流。針對三電平逆變器存在的中點電位不平衡情況,提出一種新型調制方法,該方法能夠很好地抑制中點電位波動。通過仿真能夠看出,B相電網電壓跌落和C相、B相電壓同時跌落情況下,本文提出無差拍控制方法均能很好地跟蹤給定電流。
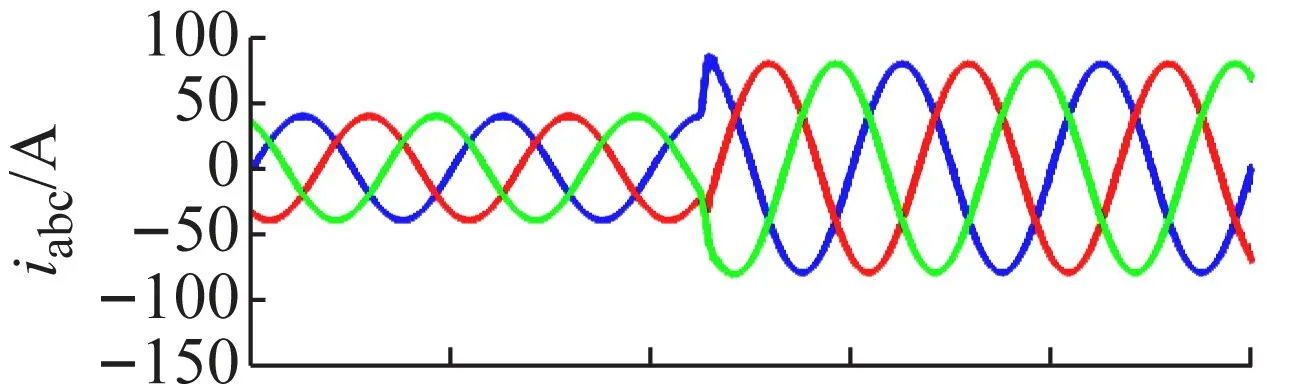
圖7 C相和B相電壓跌落情況下光伏發電系統電流跳變波形
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56