自主泊車系統 APS的現狀與發展
2018-10-08 09:31:36陳天殷
汽車電器 2018年9期
關鍵詞:系統
陳天殷
(美國亞派克機電(杭州)有限公司,浙江 杭州 310013)
1 自主泊車系統慨述
長期以來,人們都希望自動駕駛汽車能實現。當你到達寫字樓、商場或游樂園等目的地后,你在大門前下車,而你“訓練有素”的座駕會自主去停車場找妥車位停泊鎖好(圖1)。當準備回家時,智能手機上的快速通信就會把愛車開回到前門,讓你上車回家。這種自動的代客泊車和它的便利將是真正讓人們享受自動駕駛汽車技術的便利和高效。超聲波測距系統、倒車影像和電動助力轉向控制和模糊控制是其核心技術。

圖1 遙控器發指令指示車輛自主泊車
自主泊車系統(The Independent Parking System)是本世紀初與自動駕駛技術同時發展成長的新產品。雖然城市交通主干道以及各路支線空間意識特別強烈,道路邊沿停車在國內或是國外都被當做一種合法的解決方案,經常可以遇到,但卻是一種有難度的技巧,尤其是當道路管理人員把停車位規劃得緊湊又狹窄時(圖2),要保證泊車的高可靠性(reliability)得到實施。
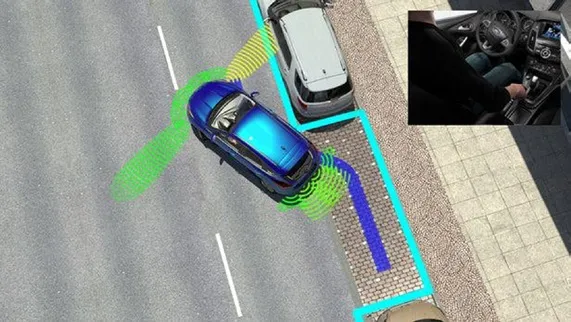
圖2 并行泊車(與車身中軸線相平行的車位)
20多年以前,法國國家汽車研究所(INRIA)建造了首輛原型車,解決了城市環境里無論是道路邊,還是社區內平行泊車的課題。這是自動駕駛汽車研究的重要領域,也為今日自主泊車在車輛上的商業應用奠定了基礎。有3種泊車形式。圖3是一種垂直泊車,顯示的泊車車位是與車輛行徑路線相垂直的情況。另一類型是車輛交付傳送帶,進入立體車庫排序就位,如圖4所示。

圖3 垂直泊車

圖4 由電梯、傳送帶進入立體車庫停車位
21世紀,開啟了汽車智能技術的新時代。以智能制造技術為主導,各行業先后進入工業4.0時代,充分利用信息通信技術、網絡空間虛擬系統和信息物理系統相結合的手段,將制造業向智能化轉型。作為第3層次的無人駕駛車輛一環的自主泊車系統,其基礎源自20世紀80年代開發的自動泊車輔助系統APA(Automatic Parking Assistance System) 不斷普及與推廣。
APA系統兩組主要的硬件是控制單元和位于前后保險杠及車身兩側的超聲波雷達探頭,按下自動泊車輔助系統激活按鈕,雷達探頭會在低車速(30km/h)及側向距離1.5m左右內成功完成掃描。而自動泊車輔助系統,當在車位旁有路燈桿、中小型樹木等柱狀障礙物時,為防止雷達探測發生誤差造成碰撞風險,此時系統將不被激活。前后左右的雷達探頭測量車輛自身與周圍物體間的距離與角度,駕駛員僅需控制車速,車載電腦計算出操作流程,配合車速調整方向盤轉動,自行進入停車位,但擋位及制動還需人為控制,尚未實現全智能化。
無論對于新手還是經驗頗豐的老駕駛員把車泊入停車位,都是駕駛過程中相對不容大意、需要特別關注的一個環節,尤其是遇到偏窄的車位。近幾年一個智能化更炫酷的配置出現在一些新款的車型上,能自行判斷車位,自動泊車入位,即是自動泊車輔助系統APA。其包括倒車雷達、倒車影像、360度全息影像等配置,已成為中高檔汽車的標配。如福特的福克斯掀背車(Ford Focus Hatchback),國內的大眾途安、帕薩特cc、斯柯達昊銳、豐田皇冠、梅賽德斯-奔馳、寶馬、雷克薩斯LS等車型配備,大都采用由INRIA 開發的關鍵技術陣列所設計的基本系統。因而,INRIA的研究成果已成為汽車工程師協會(SAE)J3016 Standard的通用標準。
有關交通事故數據庫和保險公司事故理賠的統計資料表明:泊車事故占各類交通事故30%以上,其中1/2~3/4又是倒車的泊車碰撞造成的。今天,科學家借助深度神經網絡已進一步破譯人類的思維與想象,人工智能(AI:Artificial Intelligence)正走近人類大腦,自主泊車系統的實現已成為可能。圖5展示了一臺日產汽車公司的聆風電動汽車在無人駕駛的情況下實現自動泊車。
2 自主泊車系統的基本原理
2.1 APS的構建

圖5 無人駕駛的日產聆風電動汽車實現自主泊車
自主泊車系統由3個功能塊組成:①環境數據采集系統,包括圖像采集和車載距離探測系統,將圖像與車身和障礙物間距離的數據,由數據線傳遞至中央處理器;②CPU對數據分析處理,根據車輛當前位置、目標位置及周圍環境參數作出自主泊車策略,并轉換成電信號;③車輛策略控制執行系統在接受電信號后,指令指示車輛行駛的方向、角度及動力支援等諸方面的操控。
自主泊車系統需要應用到能支持自動駕駛、安裝在車身各處的眾多傳感器,包括車載雷達(激光雷達系統)、視覺CCD攝像頭和超聲波傳感器探頭,還有全球定位系統。雷達用于自動巡航控制、碰撞預警、泊車和并線輔助,并提供地圖信息,便于車輛自動導航及發現行人、自行車及其他障礙物;視覺攝像頭主管的是倒車安全、盲區監控、車道保持和防疲勞等;利用超聲波探測車輛周圍環境,測量與其他車輛及障礙物之間的距離,組成環境數據采集系統。當車輛在獲得合適的停車位信息后,通過CPU軟件系統指揮硬件的運作,即可使車輛泊車入位,并以顯示器(或蜂鳴器)裝備告示。圖6繪出了美國Analog Devices公司關于車輛運用雷達超聲波技術的裝置工作于APS的情況。

圖6 Analog公司為車輛提供雷達超聲波裝置
1)駐車定位系統(PTS)讀取車速擋位狀態、點火開關狀態等信息,促動車距傳感器和警告元件,通過Flax Ray總線與CAN網絡通信。
2)電動助力轉向機構和轉向柱管控模塊控制單元讀取方向盤轉角和轉向角速度,通過Flax Ray 總線與CAN網絡通信,鏈接電子控制單元ECU。
3)APS還需鏈接車輛穩定系統控制單元,通過分析各傳感器傳遞來的信號向防抱死制動(ABS)、起步加速防滑控制(ASR)發出準確的控制指令、糾錯,保證車輛維持良好的動態平衡,在各種狀態下有最佳的穩定性。當后輪驅動車輛因轉向過度、后輪失控而甩尾時,ESP會輕微制動外側前輪來穩定車輛(此時因降低輪速而使車輪抱死);當轉向不足時,ESP會迅速輕微制動內后輪,來校正行駛方向。
福特汽車采用英飛凌SAK-XC2336B-40 F8 0L AA型的中央處理器,該項目在已經開發出的原理樣機的基礎上,結合產品樣機的要求,進行系統的可靠性研究、匹配性試驗以及生產工藝的優化,以改進系統的穩定性和可靠性,降低成本,滿足產品的使用性能。美國的業界認為英飛凌(Infineon) 公司對自主泊車系統關鍵技術研究較為領先。一臺英飛凌的自主泊車系統結構框圖見圖7,產品圖片見圖8。
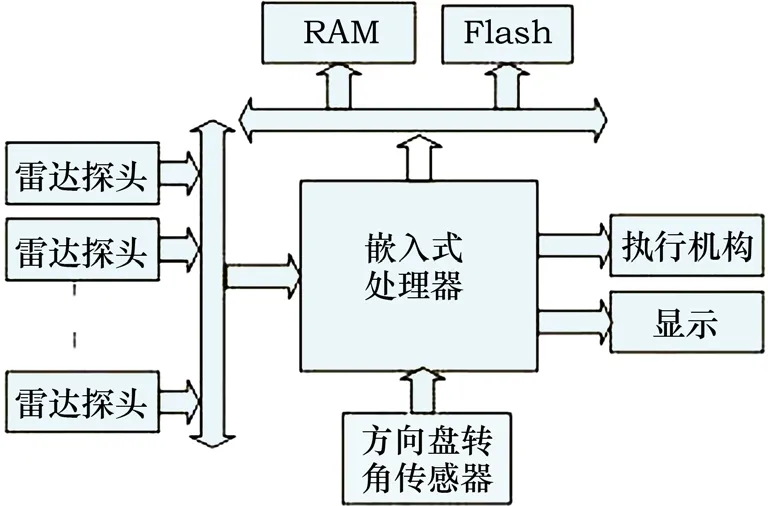
圖7 一臺英飛凌的自主泊車系統結構框圖
圖8 英飛凌的自主泊車系統產品圖片
該產品的性能指標:泊車最大行駛速度為10km/h;在目標停車位置上與其他兩輛相鄰汽車的平行距離為30cm;最小停車位長度為1.5倍車身長度;正常工作溫度為-40~85℃,存儲溫度為-40~125℃;ECU通過相關環境、機械試驗,具有過流、過電壓、短路等常規保護功能。
所聯系的傳感器:霍爾傳感器(位移信息);加速度傳感器(加速度信息);超聲傳感器(障礙物距離信息);CCD攝像頭(車位大小、障礙物情況信息);角速度傳感器(左右轉角角速度信息,以提供左右轉動角度的指令)。
圖9展示了自主泊車系統的運行框圖。
2.2 APS的核心技術與運作
2.2.1 超聲波測距是時間差測距法

圖9 自主泊車系統運行框圖
超聲波發射器向某一方向發射超聲波,發射的同時開始計時。該超聲波在遇到障礙物時會即時返回,超聲波接收器在接收到反射波時,即時停止計時。由超聲波在空氣中傳播速度及超聲波發射接收的時間差即能計算出發射點到障礙物間的實際距離,公式為:
S=1/2(Ct)
式中:C——超聲波在空氣中傳播的速度(與溫度相關);t——超聲波發射接收的時間差(不僅與單片機選型有關,而且定時器精度越高,測量結果越精確)。
超聲波傳播速度與溫度有正向線性關系,溫度每升高1℃,聲速增加0.607m/s。因而有修正后的實際波速V=(331.5+0.607t)m/s ,t是溫度檢測電路測得的現場實時溫度。超聲波測距原理如圖10所示。

圖10 超聲波測距的原理圖
2.2.2 CAN數據總線中各控制單元的聯網關系
由人機交互系統的人機界面啟動并實時顯示泊車過程,依據超聲波測距、雷達巡航、車輛檢測、CCD攝像頭和陀螺儀等組成環境采集系統功能模塊(測量車位實際位置與寬度,評價車輛是否能容納入泊車位正中),除有上一節已提及的PTS和ESP外,還需同時啟用下述控制單元與CAN總線通信聯網實現APS的泊車控制:①防抱死制動系統(ABS)控制單元,實現減速制動,并獲取車輛位移信息;②轉向柱電子裝置控制單元,獲取車輛停泊某一車位的信息,為自動轉向作準備;③由轉向力矩傳感器等組成的助力轉向控制單元,實現車輛自動轉向功能。
2.2.3 泊車路徑規劃與控制
圖11繪出一平行泊車的實施過程。

圖11 一輛福特車的平行泊車
平行泊車常用的是確定公法線加相切圓弧的方案規劃設計一條可行的企望路徑軌跡,操控車輛沿企望的路徑運動進入目標停車位,如圖12所示。
但此方案對傳感器與執行器的工作精度要求甚高,較難補償系統運行的動態誤差,于是會轉向借助于依托熟練駕駛員經驗構筑的模糊控制(fuzzy control)技術。
2.2.4 模糊控制技術
模糊控制技術是智能控制的一個重要分支。它是近代控制理論中建立在模糊集合論基礎上的一種給予模擬算法語言規則與模糊推理的控制理論。模糊控制有強的魯棒性(Robustness),干擾與參量變化對控制效果的影響被極大削弱,尤其適合非線性、時變及純滯后系統的控制。模糊控制無需被控制對象有完備精準的數學模型,故對難以創建模型的控制對象,如APS,不失為一種良好的控制方法。魯棒性是表征控制系統對特性及參數擾動的不敏感性。魯棒性強,使系統在異常、危險和誤操作情況下穩定性好。APS的動態檢測系統和模糊補償系統可靠運行得以保障。
目前,對資深駕駛員泊車經驗知識的運用是轉化為模糊控制來實現的。操作流程是:①尋找車位;②朝車位轉向;③朝車位反向轉向;④車位內姿勢調整4個環節。而關鍵的③、④這兩個環節這里只能定性,而轉向角度、方向、起止等定量內容,熟練的駕駛員原是各自得心應手地操作,他人難以復制描述。模糊控制規則的完備性,模糊變量隸屬函數的全局最優性也就較難保證。
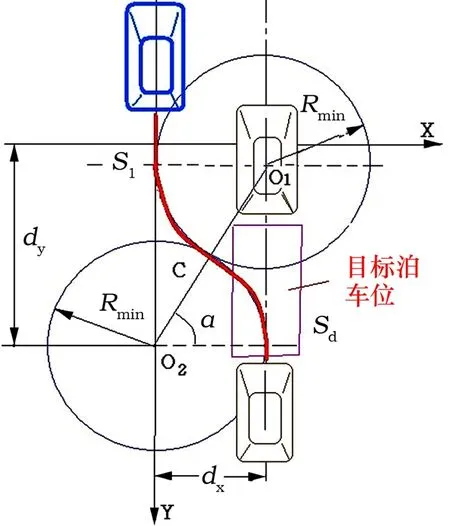
圖12 共切圓弧的路徑規劃
2.2.5 小結
基于路徑規劃和經驗知識相結合,既具備路徑規劃的精確性,又兼容了經驗知識模糊控制的魯棒性,是當前業界深入探研的方案。如圖13所示,設計一條圓弧加公切線的泊車規劃路徑。在該路徑上選取4個關鍵點(P1、P2、P3和P4)作為姿態調整的目標。
由泊車過程的形位姿態的信息,提取n(如12或16)種足夠多的特征模型作為描述泊車動態行為的特征函數模型,由模糊控制技術將資深駕駛員的泊車策略,構筑成控制模態集。開始進入自主泊車程序后,會先依據特征模型的先驗知識和實時的車輛位姿與泊車目標間的偏差,對當前車輛特征狀態進行模式比對識別,辨識出優選的特征狀態驅動所相應的控制模態,以模仿資深駕駛員在泊車過程中的粗調和微調;并通過控制車速和前輪轉向,車輛依次逐個跟蹤各“路徑關鍵點”,指令控制電動助力轉向系統EPS,進而控制車輛方向盤轉動,同時操控車輛行駛速度,進行泊車操作,逐步穩妥地自主泊車入位,實現擬人化的自主泊車智能控制。
APS啟用的條件:①車速低于15 km/h;②當道路旁平行泊車時,車輛的縱軸線與路沿間的夾角(圖13中的角度θ)應大于20°。
該過程利用各種傳感器傳輸來的數據信息,運用路徑規劃、行駛距離和行駛速度的融合算法,逐一控制車輛運動到達預定的關鍵點。可由圖14表示出運作的過程,圖15繪出了路徑規劃與模糊控制相結合的控制流程圖。
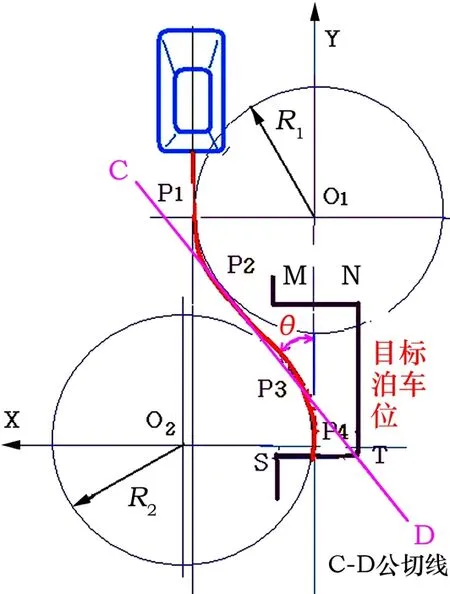
圖13 兼具路徑規劃與模糊控制的泊車方案
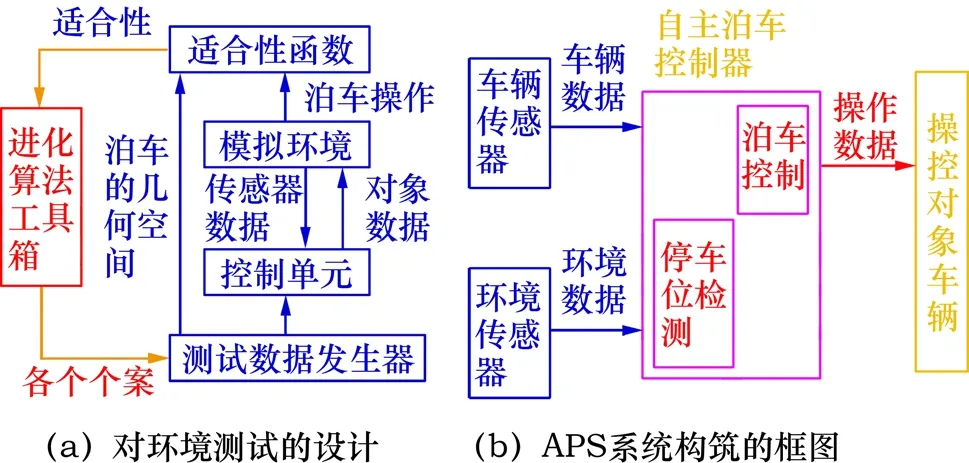
圖14 自主泊車運作過程
2.3 系統的流程圖
圖16 是以蓄電池為電源的自主泊車系統運行的流程圖。
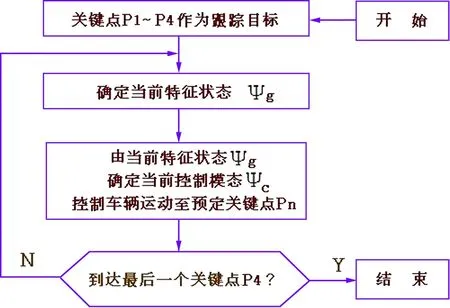
圖15 路徑規劃與模糊控制結合的控制流程圖

圖16 自主泊車系統運行的流程圖
模糊控制需先建立汽車前輪轉向的運動學模型,設置相應的輸入、輸出變量,設計各自的隸屬函數和模糊控制規則表,構建多維的模糊控制器。
3 APS系統特點及應用實例
當前在國內可以見到的車型如上海大眾途觀、奔馳B200、一汽大眾CC、斯柯達昊銳、一汽豐田皇冠、雷克薩斯LS等都裝有自動泊車輔助系統。如奔馳B200,當探測到合適的停車位后,系統會顯示“P”進行提示,掛入倒擋,系統會顯示“Park Assist Activate”(泊車輔助激活),按動方向盤左側的上箭頭即為確定,其后的任務就讓車輛自己去完成吧。駕駛者只需通過制動來控制車速,并注意車輛與前后兩車的距離。B200在完成泊車動作后,車輪自動回正,駕駛者無需作任何的調整。還需要注意的是,B200在進入自動泊車狀態后,駕駛者雙手不能觸碰方向盤,否則系統會自動停止。
這套自動泊車系統主要由兩部分組成:控制單元和位于前保險杠兩側的超聲波雷達探頭。按動半自動泊車輔助系統激活按鈕之后,雷達探頭可在車輛行駛時對車輛兩側進行掃描,時速30km及側向距離1.5m之內均能成功完成車位掃描。但當車位旁出現樹木、路燈桿等柱狀物時,為避免雷達偵測出現誤差而發生碰撞風險,此時輔助系統將不被激活。
無需人工干預自主泊車入位,自主泊車控制是無人駕駛全自動汽車的第一步。特斯拉、日產、福特路虎和捷豹近年都展出過可通過遙控控制的APS原型機,即在無駕駛員任何輸入下完成自主泊車。2017年1月在美國拉斯維加斯舉辦的CES(國際消費類電子產品)展覽會上,展示過目前一鍵自主泊車的走在前列的幾家產品,如寶馬全新一代7系轎車,被命名為Fully Automate Remove Valet(全自動遠程代客泊車)的系統 ,完全不需要駕駛員控制而自動停車入位,即使對應的是多層大型停車場,系統亦能完美執行停車指示。
計算機將車身安裝的雷達掃描儀掃描得到的環境數據信息、停車場自身結構和實時停車狀況的數據信息作綜合判斷,車輛即可智能地找到泊車位,執行泊車任務,并將車輛上鎖。在停車過程中,停車場內出現突發情況,如行人、孩童闖入,違規亂停等皆能安全從容應對。不僅能偵察測量到車主與車輛間的距離,告知車主;當車主需要取車時,能確切地按車主預定的時間,準時開到車主下車地點,讓車主登車開走。
特斯拉Summon自主泊車在Model S的升級版得以實施,不僅解決平行泊車、垂直泊車等任務,還能應對裝備了經過設置的HomeLink的車庫門,讓私家車庫門進出時能自動打開關閉。
在該領域,奧迪、沃爾沃、福特也都有不俗的表現,如奧迪聲稱其自主泊車技術若得以全面推廣,每輛汽車停車所需空間將可節省25%(2m2),這樣車庫能停放的車輛將是當下的1.5倍。經濟和社會效益將十分顯著。
這些著名汽車廠商常會直接利用或借助于聲譽卓著的汽車電子器件跨國公司的相關功能模塊(包括共同開發)。如英飛凌 (Infineon)、亞德諾(Analog Devices,Inc.簡稱ADI)、德州儀器(TI)、意法半導體(ST Microelectronics)等開發的APS的成熟產品,這些汽車電子器件供應商的APS專用裝置或模塊有良好的性價比。
4 當前APS的現狀與前景
4.1 中國APS研發的現狀
目前中國已躍居世界第一大的汽車消費國。2016年,汽車銷售達2743.5萬輛。但APS行業在中國技術先進的領域卻乏善可陳。可以看到清華大學、吉林大學、上海交通大學、浙江大學和西安交通大學等都有該領域的研發團隊做出原型機,取得階段性成果的報道,但多尚在實驗室小車仿真的起步摸索階段,離付諸實施商業化還有相當的距離。國內雖有大眾途安,途觀、昊銳 ,帕薩特、 帕薩特CC 和 斯柯達昊銳等車型聲稱裝置有自動泊車系統,實質是一種由系統自動控制轉向盤,駕駛員控制加速及制動踏板,兩者配合完成泊車動作的半自動泊車系統。
4.2 當前APS的難處或說若干缺憾
數字信號處理技術和智能化控制技術的快速發展,推動APS發展。應該說當前國際上現行的APS還處于初創發展階段,當前主要問題如下。
1)監視泊車車位及泊車過程,系統難以識別路面凹陷、凸起的井蓋或松散的路肩,以及泊位上的小物體,乃至小型鋒利破壞性的障礙。這些進口的APS適應于發達國家維護良好的道路和停車場。
2)僅有少數如豐田雷克薩斯的高端車型配備裝置了CCD攝像頭監控泊位,其他產品超聲波測距監控泊車位,會因傳感器表面有臟污、雨滴或冰雪等,產生誤差,影響精度。
3)舉例說,國外十分重視殘障人士的停車位。因為自主泊車技術遠未普及推廣,目前殘障人士停車位僅有人工識別標識,正常人看見自會刻意避讓。停車場尚無殘障人士專用車位的電子識別信息裝置,當前自主泊車系統也就無法識別。可見自主泊車系統應用推廣,不僅是車輛自身的技術升級,還牽涉停車場的技術改造,也是一項系統工程。
4)超聲波有極佳的傳輸方向性和穿透性,但對人和被測距的物體無任何損傷;而高精度激光雷達作為傳感器的自主泊車系統可使環境建模精準,并精準地測量測定目標車位,提高定位精度,防止碰撞。但若在人流密集地區,海量使用激光雷達對人類生活環境的影響,需要謹慎評估。
5)由于起步較早、研發生產的技術基礎雄厚,APS核心技術的功能集成模塊已為國外元器件的跨國公司寡頭所壟斷,擁有知識產權保護,對于后起的發展中國家雖是機遇,更是壓力。
4.3 APS的應用前景
智能化的APS可成為整個汽車智能化系統可以獨立調用的模塊,能根據實時現場的情況,自動選擇相應的泊車方案,可以從任意起始點開始泊車,具有相當的復雜性和創新性。
模糊控制、神經網絡、遺傳算法和粒子群優化算法等建立的軟件系統被公認為當前針對APS最有前途的軟件,能充分考慮各種環境及自身因素的參數,規劃計算出有效可行的路徑,產生控制命令,控制方向盤轉動,指示引導車輛按該路徑行駛,完成自主泊車操作。
早在2012年日產就應用4G網絡和云計算技術,將NSC-2015車輛聯網(圖5),實現智能化自主泊車,在當時是最領先的水平。自主泊車系統是自動駕駛車輛中的一個子課題。今天數據通信已把視角投向5G和毫米波通信,定會給APS的發展商業化實用帶來美好的前景。自動駕駛程度較低的汽車,只會在危險瞬間提醒駕駛員潛在碰撞將要發生,而自動駕駛程度較高的汽車,則會自動制動或作出規避。但即使自動駕駛程度很高,汽車也不能脫離通信系統而存在,因為欲實現完全自動駕駛,若無高精度地圖,就無法實現。這意味著汽車要隨時實時從地圖服務器獲取最新的信息數據。車載通信系統一直是汽車基本的安全通信和交通管理方式,汽車用上無線通信技術后,應用開始支撐基本安全、交通效率和互聯網接入等功能,車輛在V2V(車到車) 模式和 V2I(車到路邊的基礎設施)模式下實現了直接通信。
雷達主要用在自動巡航控制、碰撞預警、并線輔助和泊車等功能上;視覺攝像頭則負責倒車安全、盲區監控、防疲勞和車道保持等功能;激光雷達的主要任務則是提供高精地圖信息,以便汽車完成自動導航并及時發現行人和自行車。這些技術的作用范圍要看硬件配置和部署的環境。若在郊區行駛,雷達的作用范圍可達200 m,激光雷達也有35 m,視覺攝像頭則為30 m。如果換到城市環境,由于交通擁堵、障礙物眾多,這些硬件的探測范圍就會縮到僅有幾米,不超過10m。外部傳感器會受制于它們的“視力”,但若加上超高速的通信,車輛的傳感范圍則會大幅提升,因為四面八方的車輛都能給它提供重要信息。
一部車輛上的傳感器如果探測到一輛自行車,會將其位置和速度傳給了其他車輛。如果傳輸速率高,它發送的可能就是處理較少的原始信息,其他車輛則需要根據自己傳感器搜集到的數據進行整合處理。所以,擁有高速率和低延遲的通信系統就能讓處理和未處理的信息進行快速交換。
5 結語
人工智能技術的自主泊車控制大大降低泊車的難度,節省了時間,避免了泊車過程發生碰撞的風險,使車輛快速、準確、安全地完成泊車操作。
隨著人類社會的進步,自主泊車系統商品化推廣市場、普及應用是必然的方向,也將產生極佳的經濟效益和社會效益。低成本、高性能的自主泊車系統擁有十分廣闊的市場前景。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32