KUKA焊接機器人在工程機械制造業的應用
2018-10-08 07:41:40郭亮惠燕先楊列超張瑞臣王學讓
金屬加工(熱加工) 2018年9期
■ 郭亮,惠燕先,楊列超,張瑞臣,王學讓

掃碼了解更多
1. 概述
我公司主要生產平地機、壓路機等工程機械,鏟刀作為平地機關鍵核心部件之一,其組對尺寸、焊接質量、加工精度以及外觀質量都非常重要。尤其對于鏟刀的結構件鏟刀體的焊接質量要求達到一級焊縫,這就對焊接人員的焊接技能、設備性能、設備穩定性等方面提出了較高要求。
工業機器人不僅能夠實現焊接自動化生產,解放勞動力,提高焊接效率,而且焊接質量穩定,可保證精度和產品焊縫美觀,也便于組織生產和自動化管理,因此工業機器人在我公司被廣泛應用。本文就KUKA機器人在平地機鏟刀體自動化焊接應用狀況及技術特點進行闡述。
2. 鏟刀體結構及焊接工藝
鏟刀體主要由刀架板、上滑道、下滑道及油缸座板等組成(見圖1),屬于典型的長條形框架類結構,不僅焊縫數量多,大部分為長焊縫,而且整體焊縫質量要求很高,尤其是刀架板弧形板處連接焊縫要求為一級,其他處焊縫也要達到二級要求,焊縫外觀質量全部要求為一級。
平地機生產初期,由于制造水平落后,人力成本高,工業機器人等自動化設備還沒在工程機械制造業應用,公司平地機焊接生產處于機械化階段,鏟刀體制造主要采取機械式工裝進行組對,然后進行人工地攤式焊接。在焊接過程中需要用焊接支撐架固定焊接,為得到較好焊接位置需要用行車吊裝翻轉至船型位置,這樣不僅存在較大的不安全因素,而且由于焊縫長約4m,工人無法一次性焊完,需要停留幾次才能完成一道焊縫。采用上述方法,導致鏟刀體焊縫質量受人員技能水平的影響,一些關鍵焊縫會出現氣孔、未熔合、未焊透、弧坑等焊材缺陷,經常返修,不僅降低了鏟刀的生產效率,而且人員操作環境惡劣,焊接勞動強度大。
3. 工藝改進
隨著企業的發展,公司越來越重視生產能力的提升,組織實施了產品生產技術的升級換代,為此引進一臺工業機器人應用于鏟刀體的焊接。我公司選用KUKA KR16 L6-2型六軸天吊式焊接機器人,采用KUKA KRC2控制器,德國原裝進口EWM焊機,一套頭尾式標準旋轉變位機以及龍門式3軸移動裝置組成的焊接機器人系統(見圖2)。該系統操作時焊接機器人和變位機能夠實現聯動,完成焊接過程(見圖3)。
具體操作如下:
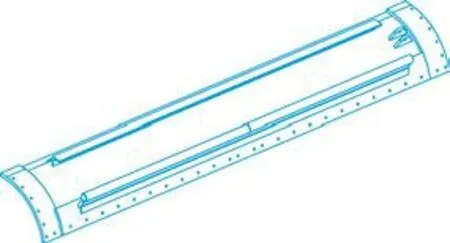
圖1 平地機鏟刀體示意
(1)機器人焊接裝夾工裝 鏟刀體采用機器人焊接前,需要一套固定裝夾工裝。首先進行了變位機的裝夾方案制定與驗證工作。利用原有裝夾工裝基礎上改造,并結合鏟刀體的結構,優化定位方式、裝夾方式,兩端采用弧形固定板,直接焊接在原有工裝上,不影響原有工裝的使用,達到了工裝的通用性;然后在弧形固定板上按照鏟刀體的鏟刀安裝孔的位置鉆通孔,通過孔對中和弧面貼合鏟刀體放置到工裝上,用螺栓和螺母將其固定牢靠,可實現變位機360°旋轉。
(2)編程順序 編程屬于機器人焊接比較重要的過程,好壞直接關系到工件的焊接質量和焊接效率。我公司采用示教器運行方式,將工件通過變位機旋轉至合適位置,移動機器臂空間位置到達需要焊接的位置,建立空間點,調整好機器人焊槍的姿態;為了日后工件焊接位置的穩定性,先編制機器人尋找工件的點,每一個位置尋點全部編制完畢,然后編制焊接程序,通過尋點的位置賦值給焊接的起始點和收弧點。由于鏟刀體多為弧形結構,焊接程序設置為圓弧編制,為了獲得船型最佳焊接位置,還需要配合變位機同時旋轉,記錄尋位點和焊接位置點,修改并保存焊接參數,最后模擬焊接過程調整焊槍角度和焊接參數,首件進行工藝驗證,尋位功能實現鏟刀體批量焊接。
(3)焊接工藝 采用機器人自動焊接,主要有焊槍擺動控制、焊接參數控制、焊槍角度及干伸長控制、多層多道焊控制。
下面對機器人焊接工藝過程控制進行闡述:首先,焊槍擺動參數包括擺動方式、擺動類型、擺動頻率以及擺動寬度極點位置停留時間,通過調整以上參數優化鏟刀體的焊槍擺動,確定焊槍的角度和干伸長度。根據不同坡口類型及坡口尺寸選擇合適的擺動方式、擺動類型、擺寬。其次,焊接參數控制,焊接參數主要包括起始點和收弧點焊接電流、電弧電壓,焊接過程中焊接電流、電弧電壓、焊接速度、氣體流量。各個參數之間要合理匹配,只有經過工藝驗證才能使用,否則會造成焊接時飛濺增多堵住焊槍口,或者產生未焊透、咬邊及弧坑等焊接缺陷。由于該EWM焊機為一元化調節,所以只需設置合理的焊接電源和焊接速度即可,焊接參數根據不同焊腳大小選擇,具體參數如附表所示。由于鏟刀體屬于關鍵部件,因此焊縫焊腳比較大,多為15mm以上,這時需要采用多層多道命令才能完成要求。KUKA焊接機器人設置有多層多道焊命令,調用該命令時,需調整焊槍姿態和焊接參數方可完成。

圖2 KUKA焊接機器人系統示意

圖3 機器人焊接鏟刀體

KUKA焊接機器人焊接參數
4. 機器人焊接特點
鏟刀體機器人焊接具有以下優點:①采用機器人焊接,焊縫可達率90%以上,基本實現了機器人全位置焊接,下來只需人工找點焊補。②通過機器人尋點功能,可實現鏟刀體焊接大批量生產。③提高焊接質量,且能保證均一穩定。因為每條焊縫焊接參數都是固定的,焊縫質量受人為因素影響較小,降低對焊工操作技能的要求。④改善焊接環境,工人只需吊裝和拆卸鏟刀體,焊接時不需要其他操作,避免弧光、煙霧和飛濺。⑤提高生產效率,產量質量容易控制。機器人焊接可以連續作業,節省人工焊接翻轉占用行車的時間,同時消除了翻轉鏟刀體的安全隱患,機器人生產節拍是固定的,安排生產計劃明確。⑥生產柔性化,相同類型的鏟刀體通過改變焊接機器人程序就可以焊接,不需要購買焊接設備就能實現自動化焊接,體現了焊接機器人在鏟刀體焊接的柔性化生產。
焊接機器人在工程機械制造業使用是必然趨勢,但由于自身的特點還存在很多不足:例如一次性購買整體設備,投資大,系統結構復雜,本體部件都是進口件,價格昂貴,國內沒有可靠的生產能力;對設備維修要求很高,一旦過質保期,廠家維修價格貴;編程、故障排除、軟件運行等需要專業培訓,才可以上崗。
5. 結語
經過鏟刀體首件工藝驗證,所有焊縫達到要求,目前已經批量運用機器人焊接,替代了原來人工地毯式焊接,降低了工人勞動強度,消除了行車翻轉存在的安全隱患,同時提高了焊縫質量、生產效率,滿足其他類型鏟刀體的柔性化設計,符合公司的“降本增效”的要求。下一步將繼續推廣機器人自動化焊接在工程機械制造業的應用,不斷提高焊接自動化水平,提升產品的核心技術競爭力。
猜你喜歡
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
建材發展導向(2021年6期)2021-06-09 05:57:08
裝備制造技術(2021年1期)2021-05-21 07:55:04
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
金屬加工(熱加工)(2020年12期)2020-02-06 05:59:00
中國生殖健康(2019年2期)2019-08-23 08:12:08
制造技術與機床(2018年12期)2018-12-23 02:40:58
產品可靠性報告(2017年7期)2017-09-05 09:49:12
制造業自動化(2017年2期)2017-03-20 14:26:13
汽車觀察(2016年3期)2016-02-28 13:16:26
