某型機(jī)電傳飛控系統(tǒng)位移傳感器總體布置設(shè)計(jì)
2018-10-09 10:44:14鄧海俠
直升機(jī)技術(shù) 2018年3期
孫 沖,鄧海俠
(中國(guó)直升機(jī)設(shè)計(jì)研究所,江西 景德鎮(zhèn) 333001)
0 引言
位移傳感器分系統(tǒng)是某型直升機(jī)電傳飛行控制系統(tǒng)的重要組成部分,本文研究的傳感器是電傳飛控系統(tǒng)基本控制回路所需要的指令傳感器。每個(gè)通道安裝了互為備份的兩個(gè)電氣兩余度位移傳感器,兩個(gè)互為余度的位移傳感器,其輸出特性的差異直接影響電傳飛行控制系統(tǒng)對(duì)該通道位移傳感器信號(hào)的識(shí)別和判別,差異過大會(huì)影響對(duì)位移傳感器故障的辨識(shí)。因此每個(gè)通道位移傳感器的總體布置應(yīng)保證其輸出的差異在設(shè)計(jì)要求的規(guī)定范圍之內(nèi)。而座艙操縱裝置到每個(gè)通道兩個(gè)位移傳感器的輸入差異直接影響位移傳感器的輸出,也就是說位移傳感器的總體布置應(yīng)保證座艙操縱裝置到每個(gè)通道兩個(gè)位移傳感器的輸入完全一致。本文以橫滾通道為例,運(yùn)用CATIA DMU KINEMATICS運(yùn)動(dòng)機(jī)構(gòu)模塊對(duì)座艙操縱裝置建模,通過仿真,分析不同總體布置情況下的位移傳感器的輸入隨座艙操縱裝置動(dòng)態(tài)輸出的變化情況,總結(jié)出電傳飛行控制系統(tǒng)位移傳感器總體布置的設(shè)計(jì)方法。
1 電傳飛行控制系統(tǒng)及位移傳感器分系統(tǒng)
所謂電傳飛行控制系統(tǒng)是一個(gè)“應(yīng)用反饋控制原理而使飛機(jī)運(yùn)動(dòng)成為被控參量的電氣飛行控制系統(tǒng)”[1]。它由機(jī)械、液壓、電子、電氣等部件組成,同一般的控制增穩(wěn)系統(tǒng)一樣,包括位移傳感器、指令模型、測(cè)量元件及舵機(jī)回路。將駕駛員的人工操縱指令(力或位移)轉(zhuǎn)化為電氣信號(hào),與來自測(cè)量直升機(jī)運(yùn)動(dòng)參數(shù)的反饋信號(hào)結(jié)合后進(jìn)行傳輸,然后再將處理后的電氣信號(hào)轉(zhuǎn)化回機(jī)械位移來控制舵面。它用電纜替代座艙操縱裝置到助力器之間的機(jī)械桿系,實(shí)現(xiàn)駕駛員對(duì)飛機(jī)運(yùn)動(dòng)進(jìn)行控制的目的。框架圖見圖1。
駕駛指令傳感器是把駕駛員對(duì)于飛機(jī)實(shí)施操縱的指令(力或位移)加以敏感,以信號(hào)形式傳輸給飛控計(jì)算機(jī)的傳感裝置,分為位移敏感型和力敏感型。本文采用的是旋轉(zhuǎn)式位移敏感型指令傳感器(RVDT),它們用于測(cè)量飛行員的操縱輸入(俯仰、橫滾、航向、總距),輸出通過電纜與飛控計(jì)算機(jī)相連,信號(hào)經(jīng)過處理后供控制律使用。
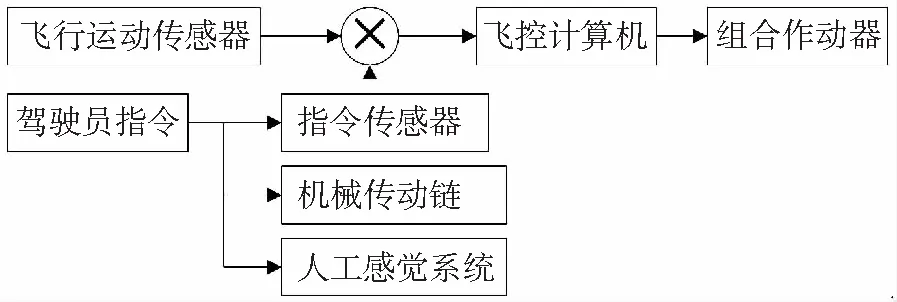
圖1 電傳飛控系統(tǒng)框架
由于在完全取消了機(jī)械操縱鏈的電傳飛控系統(tǒng)中,電子電氣器件所組成的單重電氣信號(hào)傳輸系統(tǒng)的可靠性無法與機(jī)械操縱鏈相比,因而難以滿足作為飛行安全關(guān)鍵系統(tǒng)的飛行控制系統(tǒng)的可靠性要求。所以,電傳飛控系統(tǒng)均是以多重余度的形式設(shè)計(jì)和實(shí)現(xiàn)的,其各個(gè)余度之間可以認(rèn)為是互為備份的存在形式。故某型機(jī)上,每個(gè)通道均布置兩個(gè)電氣兩余度位移傳感器互為備份,形成四余度傳感器系統(tǒng)。對(duì)于多余度系統(tǒng),位移傳感器輸出差異的大小直接影響電傳飛控系統(tǒng)故障的判別,即飛機(jī)的安全保障,所以多余度位移傳感器系統(tǒng)輸入的一致性尤為重要,它也便成為考量位移傳感器布置方案的重要因素。
2 運(yùn)動(dòng)機(jī)構(gòu)建模
2.1 座艙操縱裝置的運(yùn)動(dòng)仿真
座艙操縱裝置的運(yùn)動(dòng)仿真是在數(shù)字樣機(jī)的基礎(chǔ)上,通過定義空間運(yùn)動(dòng)副,來建立三維運(yùn)動(dòng)模型,分析座艙操縱裝置運(yùn)動(dòng)特性,為設(shè)計(jì)人員提供有效的虛擬設(shè)計(jì)手段。它通過DMU運(yùn)動(dòng)機(jī)構(gòu)來實(shí)現(xiàn),對(duì)所研究的對(duì)象進(jìn)行動(dòng)態(tài)模仿,對(duì)于分析飛行操縱系統(tǒng)具有重要意義。
對(duì)座艙操縱裝置橫滾通道建模,用空間的點(diǎn)、線、面作為最小構(gòu)建單元來代表運(yùn)動(dòng)部件,分析其運(yùn)動(dòng)原理,建立空間運(yùn)動(dòng)副,形成運(yùn)動(dòng)模型。以周期變距桿的角位移作為模型的運(yùn)動(dòng)輸入,位移傳感器的輸入角度作為運(yùn)動(dòng)輸出。
2.2 位移傳感器布置方案
位移傳感器安裝在飛行員座艙地板下,一端與機(jī)體結(jié)構(gòu)相連,另一端與操縱拉桿相連。為提升直升機(jī)的戰(zhàn)場(chǎng)生存性(即兩臺(tái)位移傳感器不會(huì)同時(shí)被擊中),并且保證機(jī)械傳動(dòng)關(guān)系的一致性,每個(gè)通道的桿位移傳感器均采用左右對(duì)稱布置,橫滾通道也如此。對(duì)于本文采用的旋轉(zhuǎn)式位移敏感型指令傳感器,為了滿足其精度要求,我們一般要求它的搖臂角度變化控制在±30°范圍以內(nèi)。因?yàn)楦┭雠c橫滾通道均由周期變距桿操縱,所以會(huì)存在耦合,為保證各通道機(jī)械的獨(dú)立性,布置位移傳感器時(shí),減小耦合也是重點(diǎn)考慮的因素。某型機(jī)為并列式座艙,對(duì)于橫滾位移傳感器的布置位置主要分析如下三種方案,其運(yùn)動(dòng)模型如圖2-圖4。其中,用直線表示座艙操縱裝置橫滾通道,虛線表示左右位移傳感器。傳感器搖臂長(zhǎng)度固定為45mm,連接拉桿與傳感器搖臂基準(zhǔn)狀態(tài)垂直。
1)兩位移傳感器分別從正副周期變距桿底端引出,兩根長(zhǎng)連接拉桿為400mm,左位移傳感器與橫向限位搖臂的連接拉桿為200mm。
2)兩位移傳感器均安裝在從副周期變距桿底端連接的橫向限位搖臂上,左右連接拉桿長(zhǎng)度分別為200mm和400mm,副周期變距桿底端與連接位移傳感器的橫向限位搖臂之間的長(zhǎng)拉桿長(zhǎng)度為600mm。
3)兩位移傳感器均安裝在從副周期變距桿底端連接的橫向限位搖臂上,連接桿長(zhǎng)度為200mm,副周期變距桿底端與連接位移傳感器的復(fù)合搖臂之間的長(zhǎng)拉桿長(zhǎng)度為900mm。
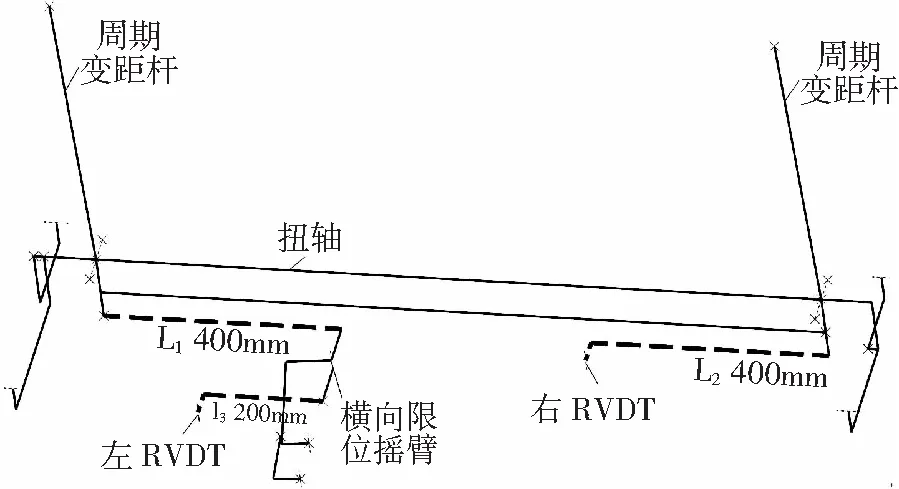
圖2 方案1運(yùn)動(dòng)機(jī)構(gòu)模型
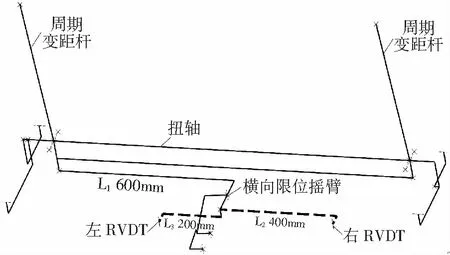
圖3 方案2運(yùn)動(dòng)機(jī)構(gòu)模型
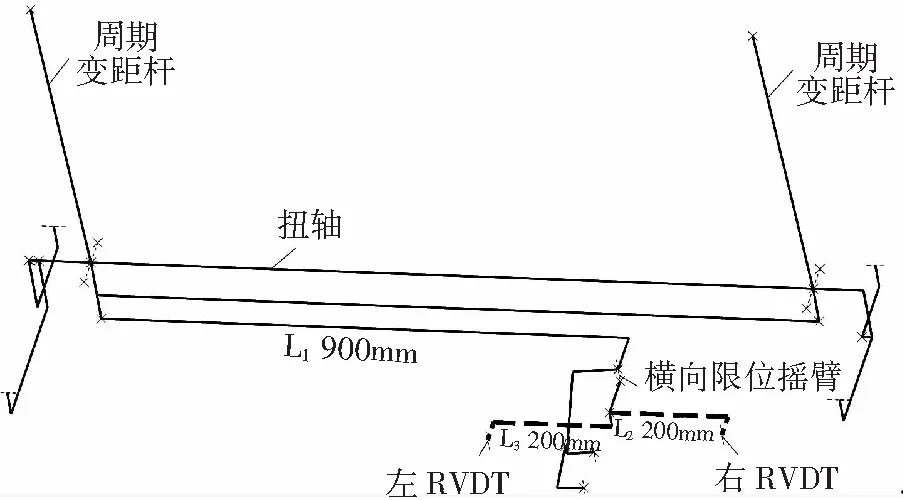
圖4 方案3運(yùn)動(dòng)機(jī)構(gòu)模型
3 仿真結(jié)果及分析
對(duì)三種不同方案的運(yùn)動(dòng)模型進(jìn)行仿真,以周期變距桿桿位變化作為驅(qū)動(dòng)(橫向范圍定義為±10°,縱向范圍定義為±12°),觀察左右兩側(cè)橫向位移傳感器的角度數(shù)據(jù),得出周期變距桿縱橫向桿位變化對(duì)橫向位移傳感器的影響曲線,如圖5-圖7所示。
當(dāng)橫向桿位變化時(shí),位移傳感器的輸入一致性很好,但縱向桿位變化對(duì)位移傳感器的影響較大。這是由于兩位移傳感器直接從操縱輸出點(diǎn)引出,拉桿雖然長(zhǎng)度相同,但都較短。
從橫向限位搖臂引出的兩位移傳感器的連桿雖然長(zhǎng)度不同,但并未影響它們的一致性。
由于從操縱輸出點(diǎn)引出的長(zhǎng)拉桿長(zhǎng)度增加,兩位移傳感器受縱向桿位的耦合變小。
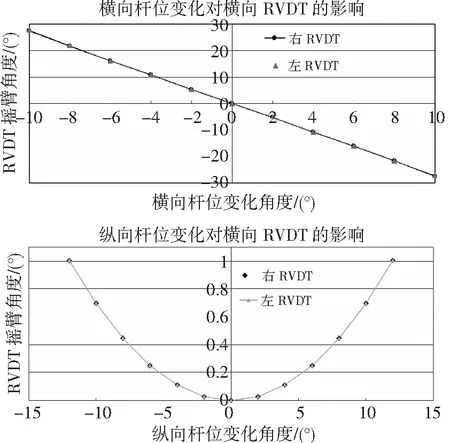
圖5 方案1仿真結(jié)果

圖6 方案2仿真結(jié)果

圖7 方案3仿真結(jié)果
表1列出了三種方案的仿真數(shù)據(jù),包括桿位極限狀態(tài)下位移傳感器的角度變化、差值及相對(duì)桿位變化所占的百分比。其中周期變距桿到左右兩個(gè)橫向位移傳感器的傳動(dòng)比均為2.67°/°,三種方案的左右位移傳感器輸入角度均在30°以內(nèi),滿足要求。其一致性都很好,相差不大。而方案3的位移傳感器搖臂角度變化占縱向桿位輸出的百分比小于5%,符合設(shè)計(jì)要求。
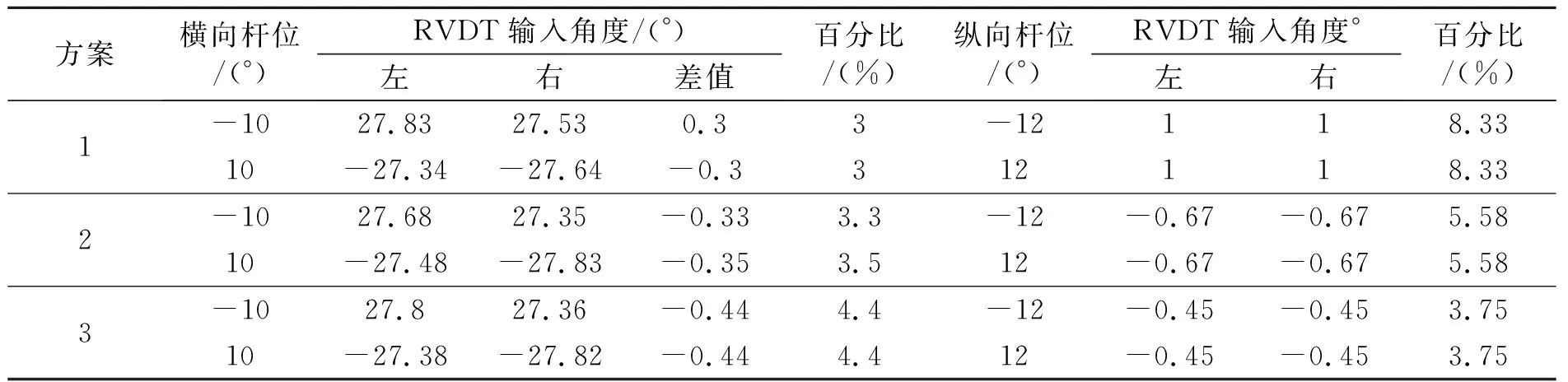
表1 仿真數(shù)據(jù)
4 結(jié)論
通過運(yùn)動(dòng)機(jī)構(gòu)對(duì)座艙操縱裝置橫滾通道的建模,分析操縱系統(tǒng)動(dòng)態(tài)特性對(duì)位移傳感器輸入特性的仿真數(shù)據(jù),可得如下結(jié)論:
1)對(duì)于互為備份的多余度位移傳感器系統(tǒng),當(dāng)機(jī)械傳動(dòng)關(guān)系相同時(shí),位移傳感器之間的輸入基本一致,即非線性小;
2)當(dāng)機(jī)械兩余度的位移傳感器從不是操縱輸入的同一點(diǎn)引出時(shí),連接拉桿的長(zhǎng)度對(duì)其輸入特性影響較小,設(shè)計(jì)優(yōu)化過程中可以適度變化拉桿長(zhǎng)度;
3)縱向通道的動(dòng)態(tài)輸出對(duì)兩個(gè)橫向位移傳感器的影響受操縱輸出點(diǎn)引出的長(zhǎng)拉桿長(zhǎng)度的影響,為更好地避免耦合,可適當(dāng)增加長(zhǎng)拉桿長(zhǎng)度;
4)總距和航向通道具有獨(dú)立性,不存在機(jī)械耦合,所以位移傳感器的布置較簡(jiǎn)單,只需要保證一致性就可以了。
經(jīng)分析比較可見,方案3可行。