基于8051單片機(jī)控制帶自鎖太陽能發(fā)電自動(dòng)跟隨系統(tǒng)*
2018-10-09 02:51:32周玉海蔣凌帆申利民
機(jī)電工程技術(shù) 2018年9期
周玉海,蔣凌帆,申利民
(1.廣州鐵路職業(yè)技術(shù)學(xué)院,廣東廣州 510430;2.惠州小明太陽能投資管理有限公司,廣東惠州 516000)
0 引言
太陽能資源分布廣泛且取之不盡、用之不竭。目前太陽能已不同程度地應(yīng)用在多個(gè)領(lǐng)域,如太陽能發(fā)電。太陽能發(fā)電無需燃料,不污染空氣、不產(chǎn)生噪聲、取之不盡用之不竭、隨處可得,可就近供電,系統(tǒng)使用壽命可達(dá)到25年以上。因此,與風(fēng)力發(fā)電、生物質(zhì)能發(fā)電和核電等新型發(fā)電技術(shù)相比,光伏發(fā)電是一種最具可持續(xù)發(fā)展理想特征的可再生能源發(fā)電技術(shù)[1]。
盡管太陽發(fā)電能擁有諸多優(yōu)點(diǎn),然而在有效利用上存在著明顯不足[2]。理論上單層硅吸收陽光的效率上限可以達(dá)33%左右,目前市場上傳統(tǒng)太陽能光伏發(fā)電采用固定式光伏板,而地球繞地軸進(jìn)行自轉(zhuǎn)的同時(shí)又繞太陽公轉(zhuǎn)所以太陽在天空中相對(duì)地球的位置每時(shí)每刻都在變化,這樣就造成了太陽能電板不能充分地利用太陽光[3]。只能將接收陽光能量的10%至15%轉(zhuǎn)化為電能,從而影響了太陽能發(fā)電的效率。固定安裝發(fā)電系統(tǒng)具有發(fā)電效率低、成本高、不宜推廣等缺點(diǎn),是限制光伏行業(yè)推廣應(yīng)用急需解決的主要問題[4]。
1 太陽能跟蹤系統(tǒng)研究和發(fā)展現(xiàn)狀
在光伏發(fā)電系統(tǒng)中使用太陽自動(dòng)跟蹤,能有效地提高太陽能的利用率[5]。國外對(duì)于太陽能自動(dòng)跟蹤系統(tǒng)的研究十分火熱,特別是美國、德國、西班牙等國家,對(duì)太陽能利用方面的研究較早[6]。而國內(nèi)對(duì)于該方面的研究起步較晚,技術(shù)還不夠成熟。中國科學(xué)研究院電工研究所、中國科學(xué)技術(shù)大學(xué)、廣州能源研究所、中山大學(xué)太陽能系統(tǒng)研究所、華中科技大學(xué)、上海交通大學(xué)、南京航空航天大學(xué)等[7],提出液壓式太陽能光伏發(fā)電自動(dòng)跟蹤系統(tǒng)研究與設(shè)計(jì)、碟式太陽能自動(dòng)跟蹤系統(tǒng)傳動(dòng)機(jī)構(gòu)、基于可編程邏輯控制器(PLC)的太陽能電池板自動(dòng)跟蹤系統(tǒng)等對(duì)太陽跟蹤技術(shù)研究方案[8]。但其追蹤系統(tǒng)結(jié)構(gòu)復(fù)雜、價(jià)格昂貴而且存在諸多不穩(wěn)定因素,遇到陰雨天和刮風(fēng)惡劣天氣情況下系統(tǒng)容易逆轉(zhuǎn)從而損壞發(fā)電設(shè)備造成經(jīng)濟(jì)損失,多數(shù)太陽能發(fā)電跟蹤裝置在跟蹤精度和智能控制方面存在一些不足[9-10]。
本文作者從實(shí)際應(yīng)用角度出發(fā),設(shè)計(jì)一種基于單片機(jī)的太陽能光伏系統(tǒng)的自動(dòng)跟蹤式裝置。通過光電傳感器檢測太陽光位置,由單片機(jī)按程序驅(qū)動(dòng)電動(dòng)機(jī)使得電池板繞軸旋轉(zhuǎn),使其能夠始終正對(duì)太陽,同時(shí)具備自鎖功能,有效地提高太陽能利用效率。
2 系統(tǒng)組成、工作原理、控制方法
太陽能自動(dòng)跟蹤系統(tǒng)主要由機(jī)械部分、電路硬件部分和驅(qū)動(dòng)組成。機(jī)械部分由電動(dòng)機(jī)、齒輪減速器、鏈傳動(dòng)、帶自鎖的蝸輪蝸桿等機(jī)構(gòu)組成。系統(tǒng)工作時(shí),先由控制系統(tǒng)計(jì)算或判斷太陽位置信息,而后輸出控制信號(hào),經(jīng)過執(zhí)行機(jī)構(gòu)的具體控制,使工作平臺(tái)轉(zhuǎn)向期望的對(duì)準(zhǔn)位置,完成對(duì)太陽的跟蹤動(dòng)作。可以驅(qū)動(dòng)太陽能電池板的自動(dòng)跟隨太陽光線在水平方向角為0°~180°轉(zhuǎn)動(dòng),并且具有自鎖功能;電路部分主要由單片機(jī)外圍電路、光電信號(hào)轉(zhuǎn)換電路以及比較電路組成。驅(qū)動(dòng)程序主要是接光電收傳感器的信號(hào)并且進(jìn)行分析處理,根據(jù)分析結(jié)果驅(qū)動(dòng)電機(jī)帶動(dòng)執(zhí)行機(jī)構(gòu)工作。
2.1 機(jī)械組成
圖1所示為基于單片機(jī)控制帶自鎖的太陽能跟隨系統(tǒng)[11]:光伏組合板被固定在光伏板轉(zhuǎn)動(dòng)軸上,且光伏板轉(zhuǎn)動(dòng)軸由左立柱和右立柱為其提供支撐,通過固定在光伏板轉(zhuǎn)動(dòng)軸的大鏈輪轉(zhuǎn)動(dòng),使光伏組合板能夠沿著東西向運(yùn)動(dòng)。大鏈輪通過鏈條與小鏈輪連接,該小鏈輪被固定在軸上,且與蝸輪蝸桿機(jī)構(gòu)連接,所述蝸輪蝸桿機(jī)構(gòu)包括蝸輪與蝸桿,蝸桿與減速器的輸出軸連接,減速器的輸入軸通過聯(lián)軸器連接電動(dòng)機(jī),由電動(dòng)機(jī)提供動(dòng)力。電機(jī)通過齒輪傳遞到蝸輪蝸桿,蝸輪蝸桿再由齒輪傳遞到小齒輪上,小齒輪與固定太能板的軸上的大齒輪同鏈條鏈接,使小齒輪上的動(dòng)能傳遞到固定太陽能板的軸上。蝸輪蝸桿自鎖功能可以實(shí)現(xiàn)單行選擇起到對(duì)電極和系統(tǒng)的保護(hù)作用。而且增加的抗干擾性和安全性,使太能板不易受到風(fēng)等自然外力的影響而改變自身的運(yùn)動(dòng)狀態(tài)。對(duì)正光源即接收光源的位置與光源垂直,當(dāng)收集裝置上的第一檢測裝置接收到對(duì)正光源并發(fā)送指令至控制裝置后,收集裝置停止轉(zhuǎn)動(dòng),所述收集裝置始終自動(dòng)保持與太陽光源垂直,最大限度吸引太陽能。
2.2 單片機(jī)控制電路
單片機(jī)驅(qū)動(dòng)電路系統(tǒng)由圖2(a)轉(zhuǎn)換電路、(b)單片機(jī)(新8051)驅(qū)動(dòng)電圖、(c)驅(qū)動(dòng)電路圖、(d)光敏電阻信號(hào)比較電路組成。光電傳感器接收光源強(qiáng)度偏差發(fā)出信號(hào),再由單片機(jī)處理信號(hào)源后發(fā)出相應(yīng)的指令讓電機(jī)動(dòng)作。單片機(jī)根據(jù)預(yù)先設(shè)計(jì)的程序接收到檢測系統(tǒng)給出的光強(qiáng)數(shù)據(jù)后會(huì)自動(dòng)用上、下光電傳感器給出的數(shù)據(jù)與中間光電傳感器給出的數(shù)據(jù)作比較,當(dāng)上光強(qiáng)大于中時(shí),會(huì)控制電機(jī)正向轉(zhuǎn)動(dòng);當(dāng)下光強(qiáng)大于中時(shí),會(huì)控制電機(jī)逆向轉(zhuǎn)動(dòng);當(dāng)上、下光強(qiáng)與中光強(qiáng)保持一致時(shí),單片機(jī)會(huì)讓電機(jī)停止動(dòng)作。從而達(dá)到控制電機(jī)動(dòng)作再控制太陽能板朝向的目的。

圖1 太陽能自動(dòng)追蹤機(jī)械系統(tǒng)
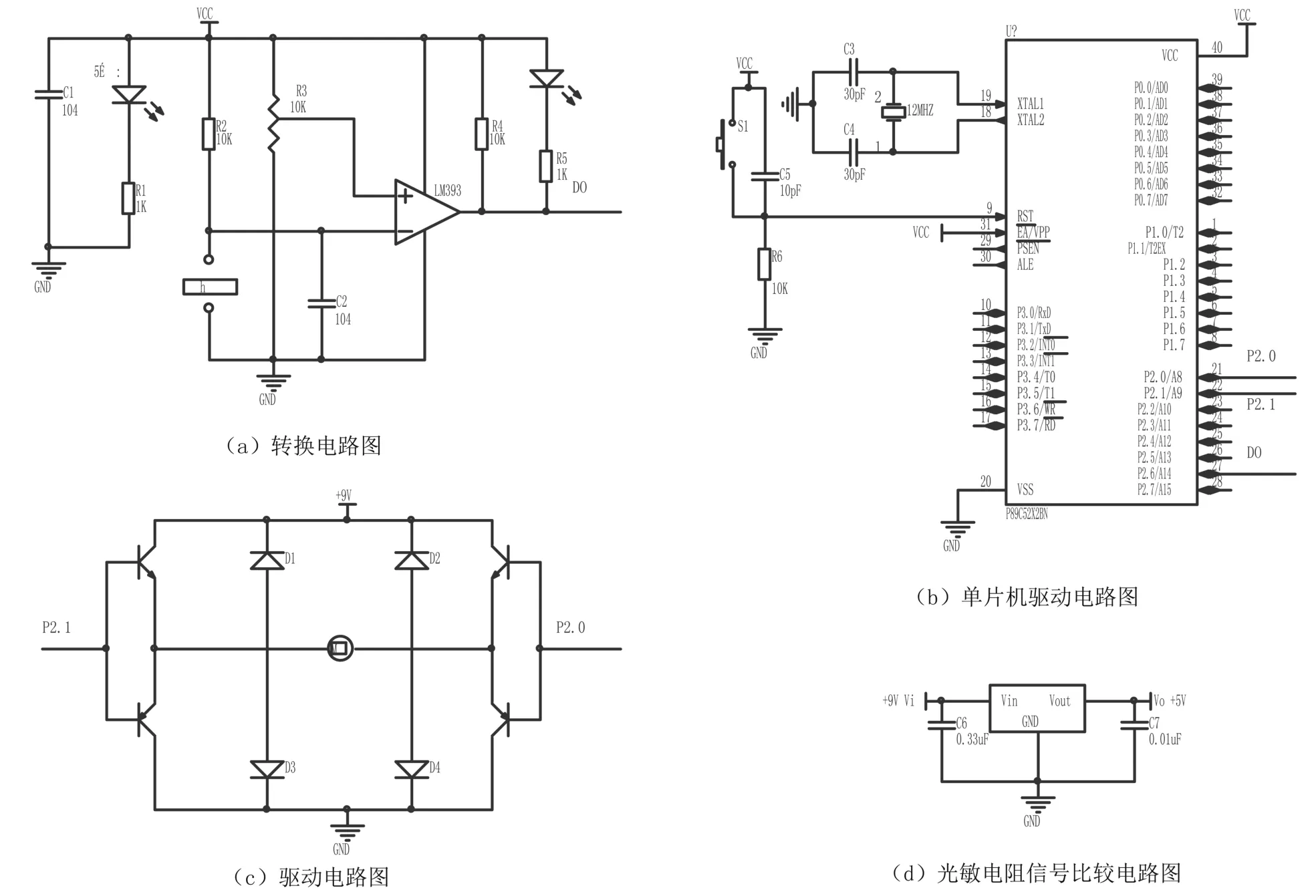
圖2 單片機(jī)驅(qū)動(dòng)電路系統(tǒng)
2.3 系統(tǒng)控制工藝流程
根據(jù)圖1所示,太陽能跟隨系統(tǒng)工作流程包括如下:驅(qū)動(dòng)裝置、傳動(dòng)裝置、收集裝置、第一檢測裝置、第二檢測裝置和控制裝置。驅(qū)動(dòng)裝置通過傳動(dòng)裝置和收集裝置傳動(dòng)連接,控制裝置控制驅(qū)動(dòng)裝置的轉(zhuǎn)動(dòng)從而使收集裝置轉(zhuǎn)動(dòng),第一檢測裝置設(shè)于所述收集裝置上,第二檢測裝置為至少兩個(gè)并與地面呈不同角度設(shè)于所述收集裝置一側(cè),第一檢測裝置和第二檢測裝置均與控制裝置電連接。跟隨系統(tǒng)控制方法主要包含以下流程:
(1)開啟所述控制裝置,控制裝置控制收集裝置自動(dòng)轉(zhuǎn)動(dòng),尋找光源位置;
(2)收集裝置轉(zhuǎn)動(dòng)過程中,設(shè)于收集裝置上的第一檢測裝置接收到對(duì)正光源,同時(shí)發(fā)送指令至控制裝置,控制裝置記錄收集裝置的角度位置并控制驅(qū)動(dòng)裝置停止驅(qū)動(dòng),收集裝置停止轉(zhuǎn)動(dòng);
(3)呈不同角度設(shè)于所述收集裝置一側(cè)的第二檢測裝置中的其中一個(gè)第二檢測裝置接收到對(duì)正光源,使得收集裝置始終自動(dòng)保持與太陽光源垂直,最大限度吸引太陽能。該第二檢測裝置發(fā)送指令至控制裝置,且控制裝置未接收到第一檢測裝置的指令時(shí),控制裝置將該第二檢測裝置的角度位置與收集裝置的角度位置比較,判斷驅(qū)動(dòng)裝置的正反轉(zhuǎn)情況并通過驅(qū)動(dòng)裝置驅(qū)動(dòng)收集裝置轉(zhuǎn)動(dòng);
(4)回到步驟(2)進(jìn)行循環(huán),控制收集裝置始終跟隨光源轉(zhuǎn)動(dòng),解決目前太陽能系統(tǒng)轉(zhuǎn)換率低的問題。
3 系統(tǒng)特點(diǎn)
系統(tǒng)動(dòng)力采用步進(jìn)電機(jī),經(jīng)過減速器和齒輪傳動(dòng)給蝸輪蝸桿,再由蝸輪蝸桿傳動(dòng)齒輪帶動(dòng),齒輪再用鏈傳動(dòng),帶動(dòng)軸,使太陽能板轉(zhuǎn)動(dòng)。系統(tǒng)具有以下特點(diǎn):
(1)通過設(shè)計(jì)多個(gè)光電傳感器對(duì)光源信號(hào)強(qiáng)度進(jìn)行采集、對(duì)比和輸出比較結(jié)果。簡化太陽能電池板角度追蹤的數(shù)學(xué)模型,使得跟蹤效果精確,性能更加可靠。
(2)設(shè)計(jì)帶自鎖設(shè)計(jì)蝸輪蝸桿機(jī)構(gòu),可以防止系統(tǒng)斷電和發(fā)電系統(tǒng)自重和風(fēng)力等外力對(duì)跟隨系統(tǒng)的損壞和逆轉(zhuǎn),有效保護(hù)光伏發(fā)電系統(tǒng)的安全。此外大傳動(dòng)比蝸輪蝸桿(齒數(shù)比為20/6),提高輸出扭矩,從而可以實(shí)現(xiàn)小功率電機(jī)驅(qū)動(dòng)整個(gè)系統(tǒng)。
(3)系統(tǒng)采用單片機(jī)加外圍電路的模式,可擴(kuò)展性好,成本低廉,結(jié)構(gòu)緊湊易于推廣。
4 總結(jié)
從實(shí)際應(yīng)用角度出發(fā)設(shè)計(jì)基于單片機(jī)控制帶自鎖跟隨太陽運(yùn)動(dòng)的太陽能發(fā)電自動(dòng)跟蹤控制系統(tǒng),通過光電傳感器檢測太陽光位置,由單片機(jī)按程序驅(qū)動(dòng)電動(dòng)機(jī)使得電池板繞軸旋轉(zhuǎn),使其能夠始終正對(duì)太陽,有效地提高太陽能利用效率。設(shè)計(jì)實(shí)現(xiàn)基于光敏電阻的光強(qiáng)傳感器、硅光電池以及機(jī)械裝置和控制電路。該系統(tǒng)自動(dòng)化程度高、實(shí)用性強(qiáng)、配備蝸輪自鎖結(jié)構(gòu)、成本低廉。經(jīng)實(shí)踐檢驗(yàn),采用跟蹤裝置后,電池板的平均輸出能量提高25%以上。對(duì)提高光伏發(fā)電效率、促進(jìn)光伏發(fā)電的推廣應(yīng)用具有重要的意義。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
