
基于光場三維重構和PSP的曲面壓力測量技術
2018-10-10 03:10:28李浩天許晟明張翰墨施圣賢
實驗流體力學 2018年3期
李浩天, 許晟明, 趙 洲, 張翰墨, 施圣賢,*
(1. 上海交通大學 機械與動力工程學院, 上海 200240; 2. 上海航天控制技術研究所, 上海 201109)
0 引 言
自20世紀80年代開始,壓敏漆測壓技術作為一種基于高分子聚合物光致發光和氧猝滅效應的非接觸式測量技術廣泛應用于空氣動力學領域,該技術與傳統離散點壓力測量技術相比,其壓力測量分辨率僅受限于圖像采集系統,因而具有測量精度高、不受復雜模型結構影響等優點。近年來,PSP測量技術在國內獲得了快速發展和廣泛應用,中國空氣動力研究與發展中心、中國航天空氣動力技術研究院、中國航空工業空氣動力研究院、西北工業大學和上海交通大學等眾多科研單位及高校對PSP測量技術開展了深入研究。不僅進行了大量穩態流場PSP測量試驗,對快速響應PSP動態測量技術展開了研究,還完善了二維PSP測量系統及圖像處理算法,并對壓力分布和溫度場的同步測量進行了相關研究。除此之外,國內對三維PSP測量技術也開始展開了相應研究,其中西北工業大學高麗敏通過在涂有壓敏漆的葉片表面上標注多個特征點的方法,成功測量了葉片表面的三維壓力分布,并完善了相關算法[11]。
目前,國際上三維PSP測量技術均基于多相機系統。德國DLR率先使用基于8個相機的三維PSP測量系統,完整地測量了M346教練機各個部分的三維表面壓力分布[14]。英國ARA使用基于12個相機的PSP系統測量了超聲速風洞中薩伯“鷹獅”飛機的三維表面壓力分布[15]。但是基于多相機的三維PSP測量系統不但提高了實驗難度、增加了硬件成本,更為重要的是極大限制了在受限光學空間下的應用。因此,倘若能用單臺相機實現三維模型表面壓力分布測量,將極大簡化實驗難度,推進空氣動力學的進一步發展。近年來,光場三維成像技術的快速發展為單相機三維PSP技術提供了一種全新的方案。光場“Light Field”概念由Arun Gershun于1936年首次提出,是指空間傳播光線的集合。斯坦福大學Ng Ren博士于2005年開發出世界首臺緊湊型光場相機,并隨之推出了Lytro品牌的光場相機[16],加速了光場技術的應用。在科學實驗測量領域,上海交通大學施圣賢及美國Brain Thurow將光場成像與粒子圖像測速技術(Particle Image Velocimetry, PIV)相結合,提出了三維光場粒子測速技術(Light-Field Particle Image Velocimetry,LF-PIV),并成功應用于流體力學實驗研究中[17-25]。借鑒光場成像技術在實驗流動測試技術的成功應用經驗,本文提出了一種基于單光場相機和壓敏漆的三維表面壓力分布和模型三維結構尺寸同步測量技術(LF-3DPSP)。
1 光場三維PSP技術
LF-3DPSP基于傳統光強法PSP技術發展而來,主要包括2個獨立的部分:(1) 基于光場的PSP測量;(2) 三維模型的光場重建。該技術與傳統PSP技術相比,具有相似的實驗步驟,但Wind-on和Wind-off圖像均由光場相機采集。此外,為了重構模型三維結構尺寸,需要額外拍攝帶投影紋理模型的光場圖像。本節將詳細介紹如何通過光場渲染和光場重建算法處理獲得三維模型表面的壓力分布,圖1列出了LF-3DPSP的關鍵圖像處理步驟,包含了該技術所使用的校準環節,壓力測量和模型尺寸測量環節,以及相關步驟所使用的算法。
1.1 基于光場的PSP測量
壓敏漆受到一定波長的光源照射后,涂層中的探針分子進入電子激發態,并通過發射波長更長的光來耗散吸收的能量;同時,激發態探針分子與氧分子碰撞,轉移吸收的能量,最終回到基態。上述過程被稱為Stern-Volmer過程,通常使用一階線性的Stern-Volmer方程表示[3]:
(1)
上式中:I指壓敏漆的發光強度;B(T)、A(T)為與溫度有關的Stern-Volmer常數;p表示壓敏漆表面壓力;下標ref表示參考狀態。
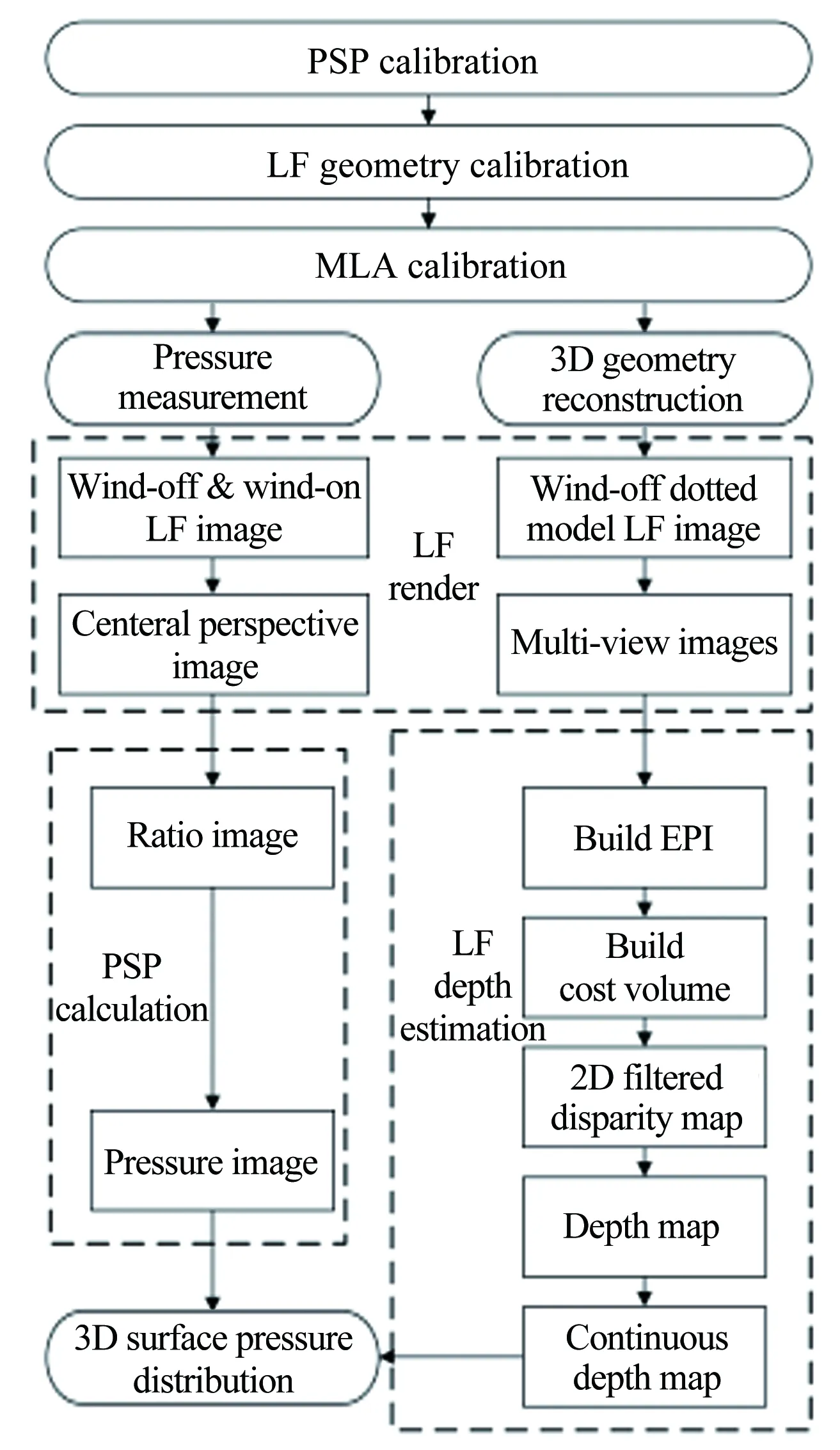
圖1 LF-3DPSP算法流程示意圖,其中柱狀框表示處理環節,方框表示環節內具體的步驟,虛線框表示步驟所屬算法
Fig.1FlowchartoftheimageprocessingstepsfortheLF-3DPSPtechnique,columnarboxmeansprocesspart,squareboxmeansprocessdetailedstepanddottedlinedboxmeansthealgorithm
在PSP技術中,吹風前拍攝的Wind-off圖像和開啟風洞后拍攝的Wind-on圖像分別表示上式中Iref和I,根據光強法可以計算得到風洞中壓敏漆表面壓力分布。由于LF-3DPSP技術使用光場相機記錄Wind-on和Wind-off條件下壓敏漆的發光強度,而光場圖像和一般圖像有著明顯不同的性質,一般圖像由單個像素點組成成像基本單元,而圖2中的光場圖像則由與微透鏡同樣形狀的像素團組成成像基本單元,這也是光場圖像能記錄光線多維信息的本質原因,因此需要對Wind-on和Wind-off原始光場圖片進行如圖1中所示的壓力測量部分的預處理工作。通過光場渲染算法(Light-Field Render algorithm)處理生成多個視角圖像,該多視角圖像包括了一般相機正視圖像(中心視角)和周圍多個視角,詳見下文。從多視角圖像中分別取出對應的Wind-on和Wind-off中心視角圖像,即為用于壓力計算的PSP圖像。最后,通過式(1)計算得到中心視角對應的模型壓力分布。該技術中除中心視角外,其余視角均可用于計算壓力分布,但是其余視角計算的模型壓力分布與后續計算的模型尺寸深度圖并非同一視角(深度圖為中心視角圖像),因此需要校正至同一視角,從而引入額外誤差。所以本文僅使用中心視角圖像計算模型壓力分布。
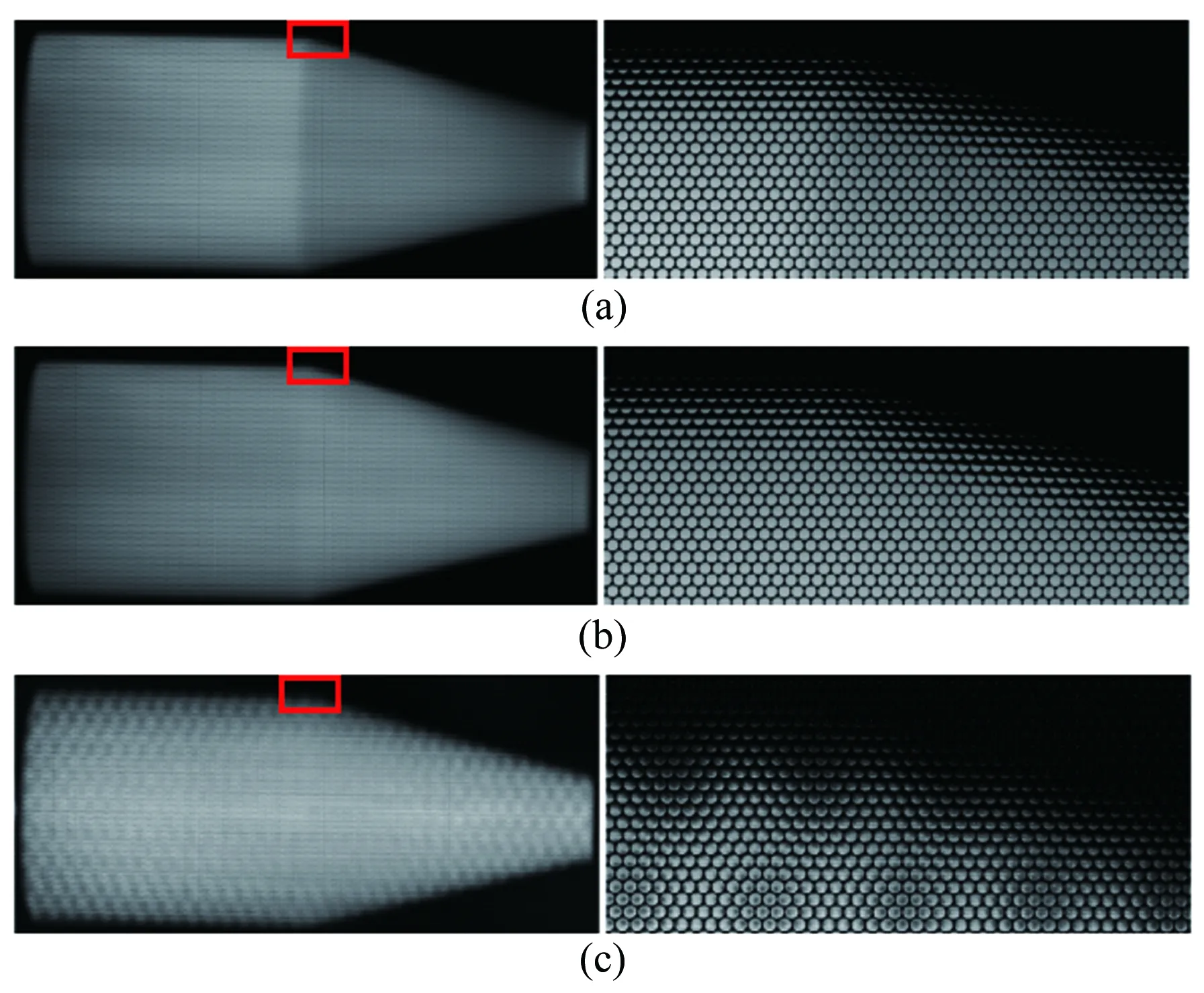
圖2 (a) Wind-on光場圖像與紅色方框區域放大圖; (b) Wind-off光場圖像與紅色方框區域放大圖;(c) 帶投影紋理的截錐體模型光場圖像
Fig.2Examplesof(a)wind-onexcitationlight-fieldimageanditszoom-indetail, (b)wind-offexcitationimageanditszoom-indetailand(c)dottedlight-fieldimageanditszoom-indetailforthetruncatedconemodel
在進行光場渲染之前,需要先確定光場相機微透鏡中心坐標,即進行微透鏡校準(MLA calibration),該校準過程在拍攝前后均可進行,無需移除模型。首先,調節光場相機的光圈至最小后拍攝白色平面,獲得由白點矩陣和黑色背景構成的微透鏡校準光場圖像[16]。最后,使用高斯擬合處理得到具有亞像素精度的微透鏡中心坐標,從而建立每個微透鏡和像素點的對應關系。完成微透鏡校準后,使用校準結果進行光場渲染處理生成多視角圖像。通過取出每個微透鏡下對應的像素團中特定位置的像素,并按微透鏡的排列順序進行組合,最后形成一張子視角圖像。該子視角方位與像素團中提取像素的位置有關,其中每個像素團的中心像素組合形成中心視角圖像,而提取像素團中不同位置的像素會組合形成不同視角的圖像,即本文所述的多視角圖像[16]。如圖3(a)簡化的一維光場成像原理所示,紅色像素代表每個微透鏡下方像素團中心像素,藍色像素代表每個像素團中最下方像素。圖3(b)表示將像素傳感器擴展至二維平面,由于微透鏡均為圓形結構,灰色區域則表示微透鏡下的像素團。將每一個像素團的中心像素(紅色像素)提取并排列拼合后構成了圖3(c)的中心視角圖像,由于視角方向與像素位置相反,藍色像素則構成了最上方的子視角圖像,綠色像素則構成了最右邊的子視角圖像。
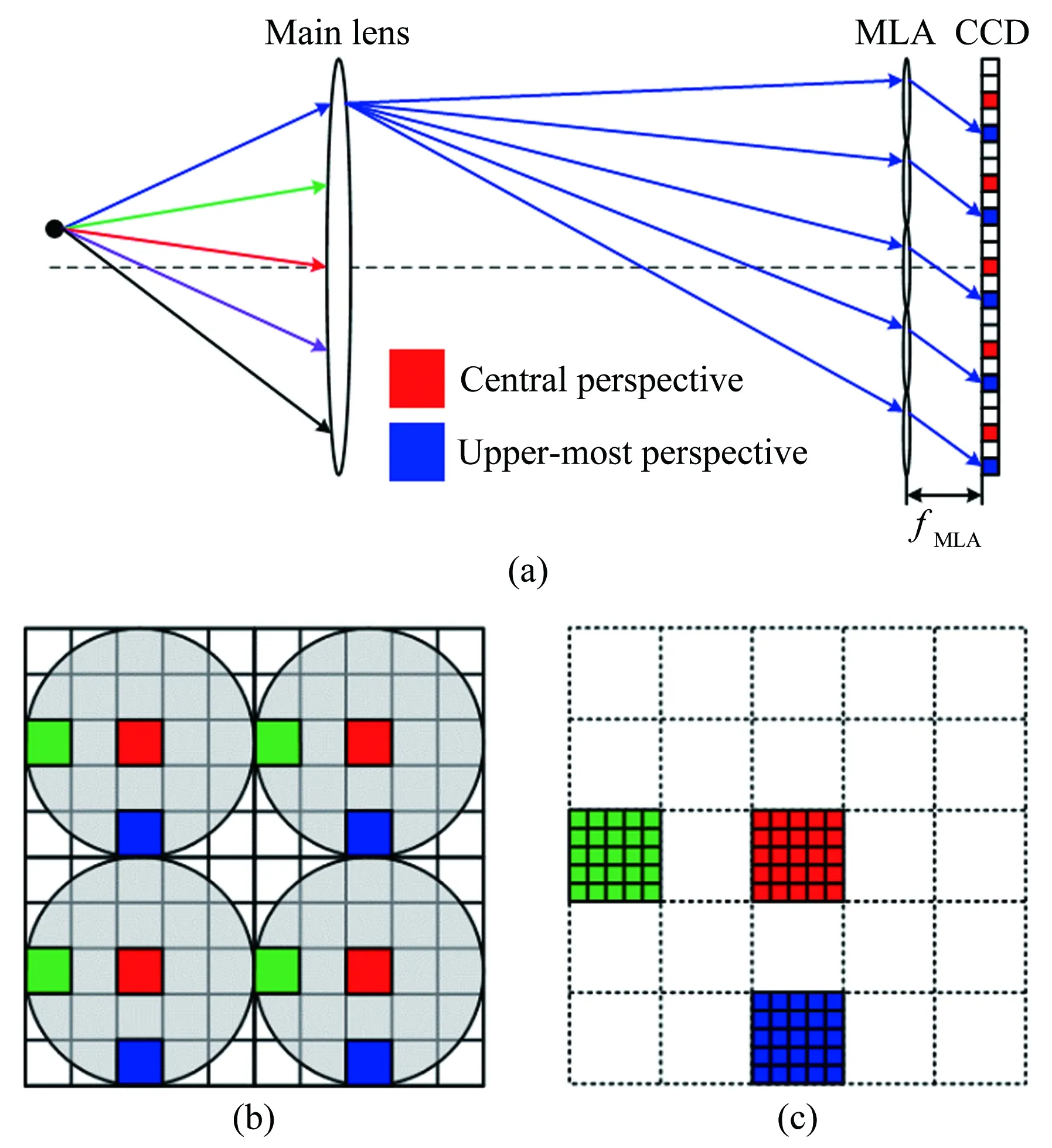
圖3 (a) 一維光場示意圖;(b) 微透鏡下CCD圖像;(c) 紅色、藍色像素和綠色集合分別表示形成的中心視角圖像、中心最上方視角圖像和中心最右邊視角圖像
Fig.3Principleofthelightfieldperspectiveshiftalgorithm(a)1Dschematicofthelight-fieldcamera, (b)sub-imageoflenslet(showingonlyfourlensletshere)and(c)artificiallygeneratednewperspectiveimages(showingonlythecentral,upper-mostperspectivesandright-mostperspectives)
1.2 三維模型的光場重構
基于PSP測量技術的基本原理,模型表面需進行壓敏漆噴涂處理,因此表面較為光滑且無紋理,難以使用現有光場三維深度算法對這種表面模型進行精確地深度計算。為準確測量模型三維結構尺寸,本文使用投影儀向模型投影圖像,從而增加模型的紋理,其目的是區別模型不同區域以增加深度計算的精度。投影紋理具有多種選擇,該技術采用如圖4所示的密集白底黑點圖案。此外,因為投影紋理只是為了增加模型紋理,投影紋理變化并不會對重構結果產生影響。帶紋理模型的光場圖像拍攝過程在Wind-off和Wind-on條件下均可進行,并且無需對模型和光場相機進行任何移動。作為驗證性試驗,本文僅在Wind-off條件下進行帶紋理模型的光場圖像拍攝,并且使用基于北京航空航天大學的光場深度算法[26]和KAIST的光場后處理算法[27]對帶紋理模型的光場圖像進行深度計算。
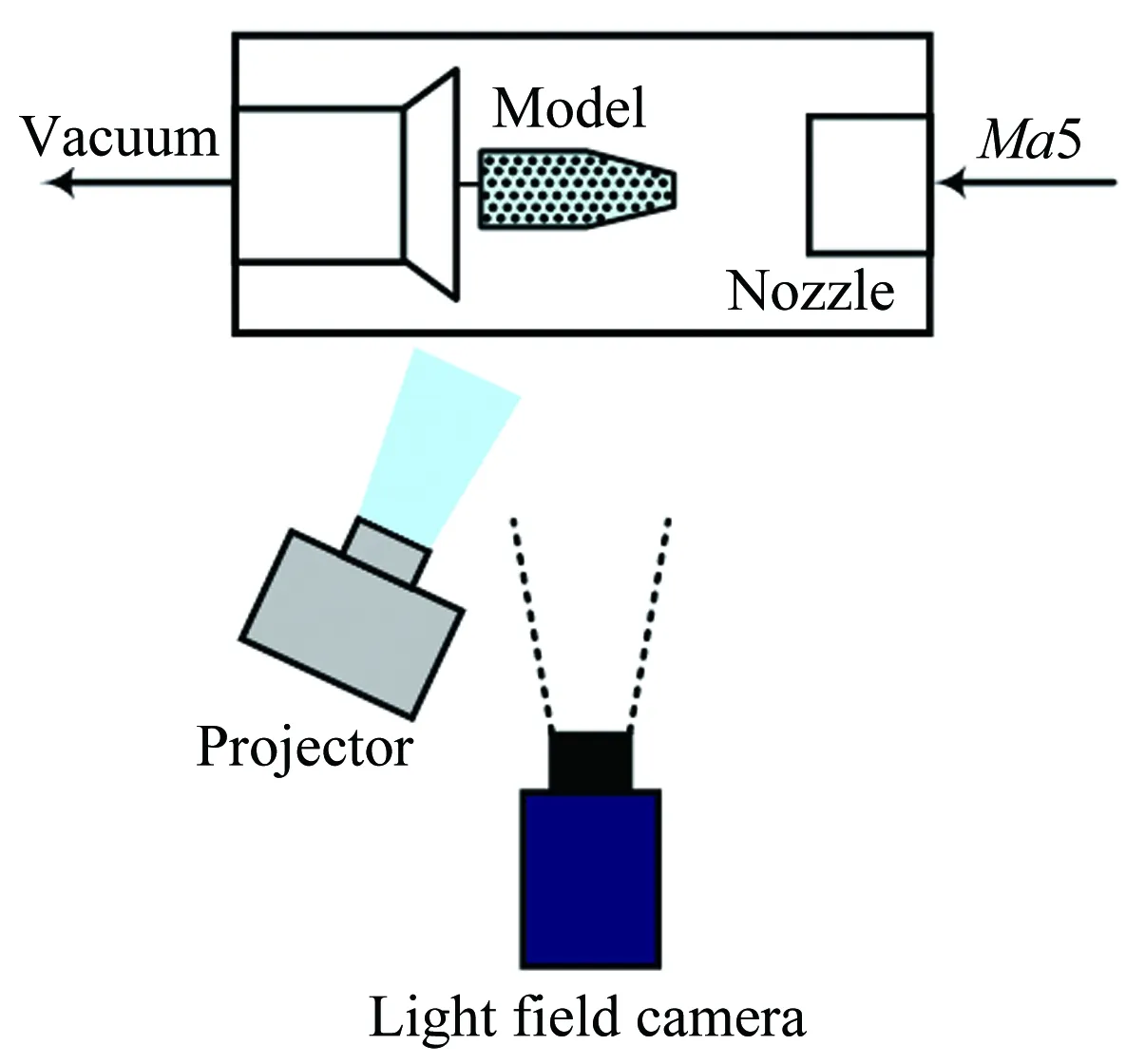
圖4 光場相機拍攝帶投影紋理三維模型圖像
光場相機形成多視角圖片有一定的規律性,因此可以形成圖5(b)中以中心視角(正常視角)為核心的方形矩陣分布的多個視角。如圖5(a)所示,u-v平面表示視角平面,s-t平面表示相機圖像平面,被拍攝物體上的某一點P在不同視角圖像中具有不同的像素坐標,即相對于中心視角的P(s0,t0)有一定程度的偏移,而偏移大小和該點與相機的距離有關。若在多視角圖像中選取中心一行視角圖像,則P點在該行視角的像素坐標沿水平方向進行偏移P(s0,t0)→P(si,t0),且相鄰圖像的偏移量相同。同理,在中心列視角中P點像素坐標沿垂直方向進行了偏移P(s0,t0)→P(s0,ti)。為更好地描述像素偏移產生的視差,本文使用外極線圖像(Epipolar Plane Image, EPI)進行計算。如圖5(a)所示,當固定t和v時,空間中點P的光線(綠色)將投影到切片平面s-u上;同理,固定s和u時,藍色光線投影至切片平面t-v上,最終形成EPI。如圖5(b)所示,將同一行視角圖像(固定t)的同一行像素(固定v)組合形成如圖5(c)所示的EPI圖像,其中每條極線的斜率大小表示了該點在各視角中像素的偏移程度,最后形成視差圖(Disparity map),得到對應的深度信息。其中深度信息和EPI斜率的關系由式(2)確定
Δu=-(f/Z)Δs(2)
上式中:Z表示空間中點沿相機軸線方向的距離;Δu和Δs分別表示P點光線在相機坐標和圖像坐標中的變化;f表示焦距。
由于每個子視角圖像均有對應的視差圖,通常以中心視角對應的視差圖為計算結果。首先,通過光場渲染得到多視角圖像,分別取出多視角圖像中心行和中心列進行組合形成2組EPI。使用具有較高魯棒性的旋轉平行四邊形邊緣算子(Spinning Parallelogram Operator, SPO)對2組EPI進行極線的邊緣檢測[26]。該算子在極線斜率變化范圍內均勻離散化得到N個斜率值,按順序標注標簽(1~N),并對每個斜率計算得到2組三維初始深度矩陣(Cost volume)。該三維矩陣的維度分別表示圖像的橫縱軸以及標簽,矩陣值表示可信度大小,標簽值代表一系列離散的斜率信息(深度信息),可信度越大表示該點所在標簽代表的深度越接近正確值。
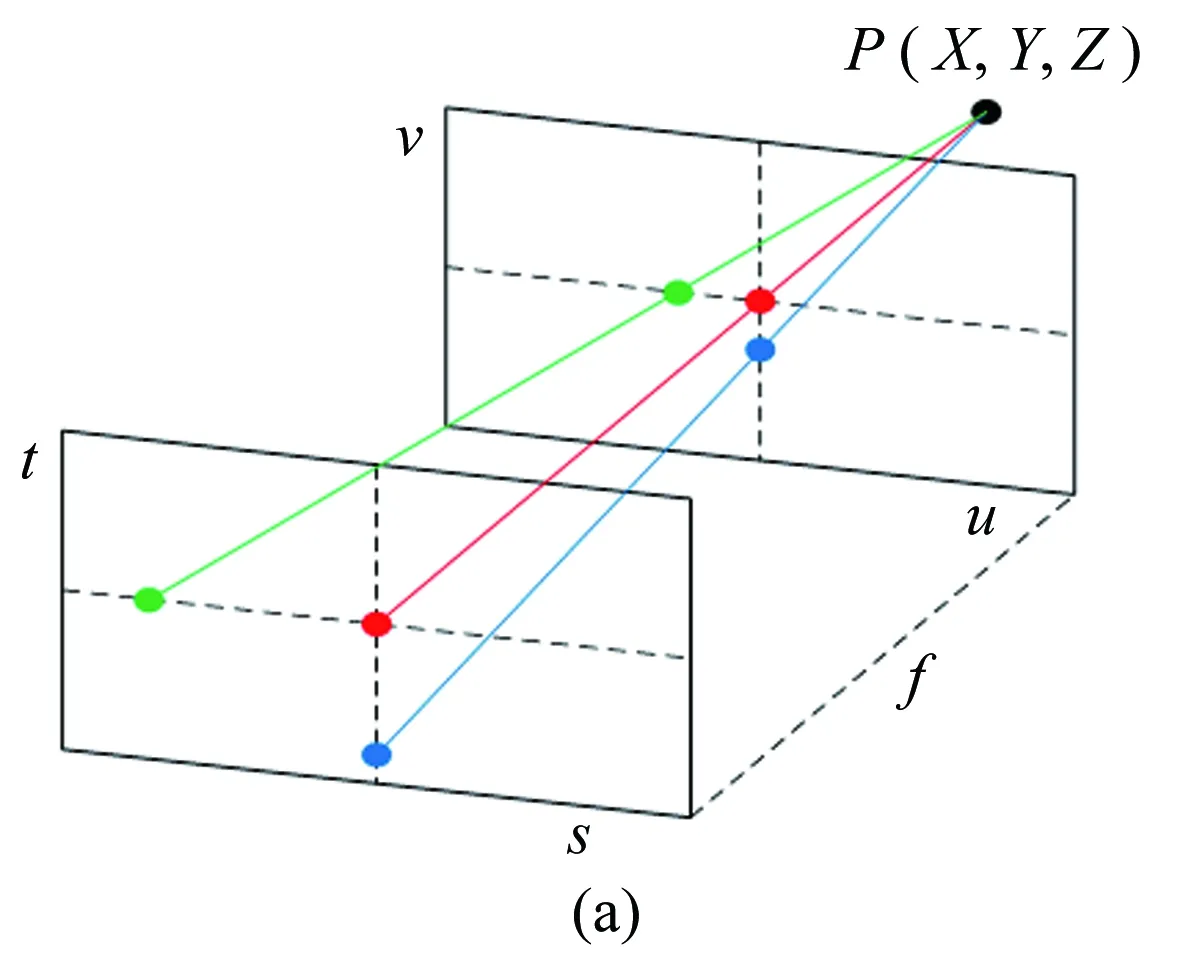
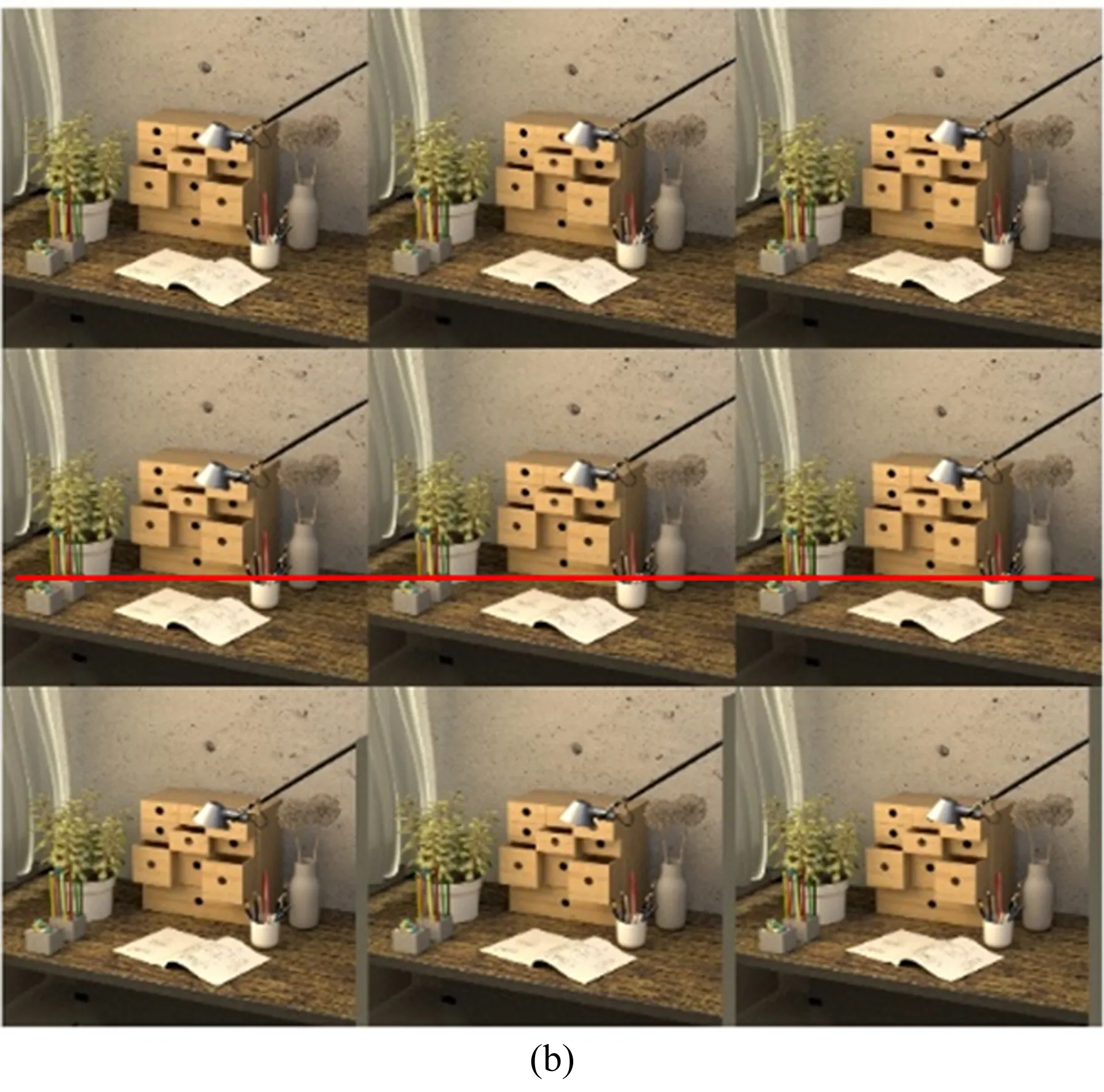


圖5 (a) EPI原理; (b) 3×3視角圖像,紅線表示同行像素;(c) 圖(b)中紅線代表的EPI;(d) 由EPI生成的視差圖
Fig.5(a)TheprincipleofEPI, (b)horizontallineperspectivesandsamelinepixel, (c)EPIfromtheredlineinFigure(b), (d)disparitymap
然后,使用引導濾波器對三維矩陣的每一標簽層進行保邊平滑處理,消除誤差。再通過Winner-take-all策略,取出三維矩陣中沿標簽維度方向最大值所對應的標簽,得到由視差標簽組成的二維矩陣,該矩陣即為初始視差圖。最后,對初始視差圖進行后處理得到最終真實深度結果,后處理包括加權中值濾波,光場相機尺度校準和橢圓擬合再優化過程。為了獲取準確的三維尺度,需要進行光場尺度標定,將視差值轉為真實深度值。光場尺度校準與光場微透鏡校準類似,只需固定鏡頭焦距不變,在試驗前后均可進行。光場相機尺度校準設備包括校準板,電動位移臺和光場相機等。校準過程中,電動位移臺沿相機軸線方向多次移動校準板,光場相機固定不動并拍攝得到一系列如圖6所示的不同距離的校準板光場圖像,并計算初始視差圖。由于連續2張視差圖的真實位移距離已知,通過擬合可得視差值和真實深度值的函數關系。因此,基于校準結果,視差圖可轉換為真實深度圖(Depth map)。此外,上述過程中深度值或視差值均為整數精度的離散點,所以需要對深度結果進行連續性擬合。橢圓擬合再優化過程是基于已知截錐體模型表面本身的曲率特性,將深度值沿模型圓周方向進行橢圓方程擬合,連續化深度信息并降低由于投影光斑過于稀疏造成的計算誤差,最終得到具有連續深度分布的三維模型。

圖6 局部放大后校準板的原始光場圖像
2 驗證性風洞試驗
2.1 試驗條件與模型
為驗證LF-3DPSP技術的可行性,在英國曼徹斯特大學的高超聲速風洞中進行了驗證性試驗。風洞自由來流馬赫數為5,總壓p0=810kPa,靜壓pinf=1.6kPa,風洞運行時間t=7.5s,溫度保持300K不變。
LF-3DPSP測量系統主體架構與一般二維PSP測量系統設備類似,除采用光場相機替代普通相機并增加投影紋理模型的拍攝過程外,其余均采用Erdem論文中[28-31]相同的設備和模型。該試驗中使用的壓敏漆的組成成分和校準過程見文獻[32]。試驗模型采用具有大范圍曲率變化和壓力變化的截錐體模型,易于驗證該技術的正確性。
2.2 試驗結果與分析
Wind-on和Wind-off光場圖像與帶投影紋理模型的光場圖像均由作者自主開發的光場相機進行拍攝。該光場相機基于分辨率為6600pixel×4400pixel的 Imperx B6640相機搭建,采用尼康200mm微距鏡頭,并使用610nm波段的光學濾片進行濾光。基于相關分析[20],將分辨率為408pixel×314pixel的微透鏡陣列放置于主鏡頭和傳感器之間的焦平面上構成光場相機。
試驗時,拍攝完畢后使用圖1所示的步驟對原始光場圖像進行處理。首先,進行光場微透鏡校準和尺度校準;然后,原始光場圖片經過光場渲染生成分辨率為800pixel×523pixel、數量為5×5的多視角圖片;使用Wind-on和Wind-off條件下的中心視角圖片計算壓力分布(與傳統二維光強法PSP計算過程相同);并且基于光場相機尺度校準的結果,對帶投影紋理模型的多視角圖片進行深度計算,得到如圖7(a)所示的模型表面深度圖;最后,將模型深度圖片和壓力分布圖片進行融合,最終形成三維壓力分布圖。該壓力分布結果為連續10張Wind-on光場中心圖像進行均值化處理后計算得到,且未進行任何后處理。
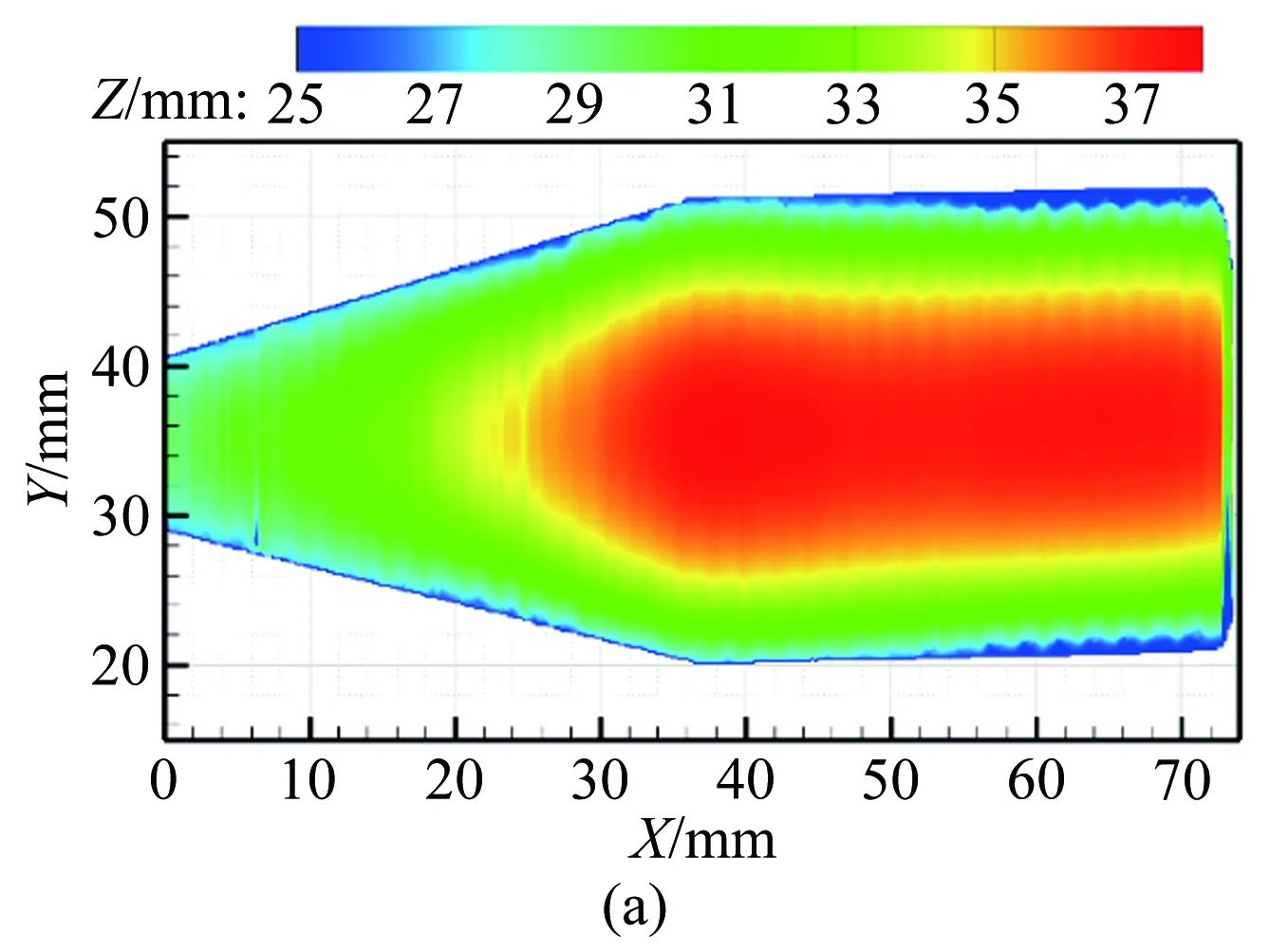
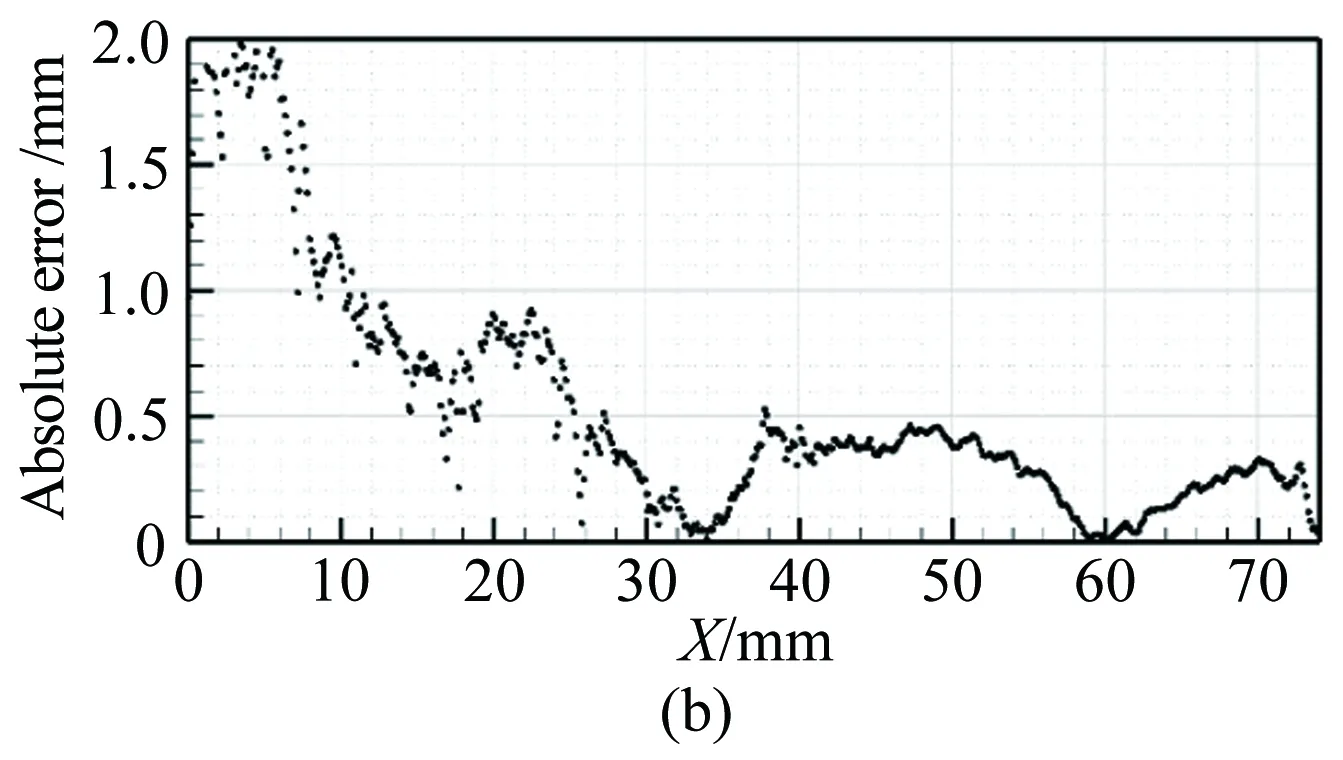
圖7 (a) 模型深度尺寸; (b) 計算結果與理論模型在模型中軸線上(y=35mm)的絕對誤差分布
Fig.7(a)Estimated3Dgeometryand(b)3Destimationabsoluteerroralongthecentralline(y=35mm)
由于該截錐體模型由CNC加工,具有極高的表面精度,誤差為±20μm,因此三維結構尺寸計算誤差以模型設計尺寸作為參考。圖7(b)表示該計算結果在x=10~74mm的范圍內絕對誤差均小于1mm,整體最大誤差在2mm左右,證明該技術可以有效進行大曲率模型的三維結構尺寸測量。但是由于投影斑點不夠密集,造成部分區域缺少紋理,對計算結果造成了一定影響。
模型壓力分布如圖8(a)所示,L表示模型長度,R表示該截錐體最小截面半徑。在吹風階段,模型有輕微的旋轉,頭部向下旋轉約1.5°。空氣經過如圖8(c)中所示的弓形激波后,在迎風向的錐形面處被激波壓縮,導致該處壓力增大,造成了圖8(a)中壓力分布不均勻,且最大壓力出現在迎風向的錐形面上。在模型截錐體和圓柱體交界處產生膨脹波,形成一個扇形連續膨脹區,因此圓柱形部分上的壓力相對較低。圖8(b)中模型軸線上壓力分布清楚地表明了上述壓力變化,圖8(c)紋理圖像則清晰地顯示了模型弓形激波和膨脹波的位置,該紋理圖像和Erdem論文[29]中圖4.25的截錐體模型CFD馬赫數云圖結果一致。而且在相似的工況條件下,風洞中截錐體偏移一定角度的壓力分布在Yang論文[31]中已有詳細論述,本試驗截錐體偏移角度較小,在模型迎風向錐形面處形成符合Yang論文[31]中描述的“漏斗”狀壓力分布,且整體分布趨勢和該論文中的結果相同。由于本試驗工況與Erdem論文[29]和Yang論文[31]試驗工況有所不同,本文只進行簡單的定性分析,后續將開展一系列定量分析。
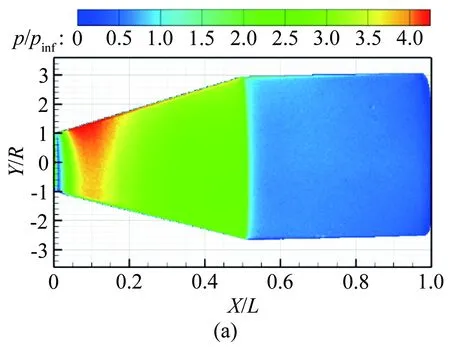

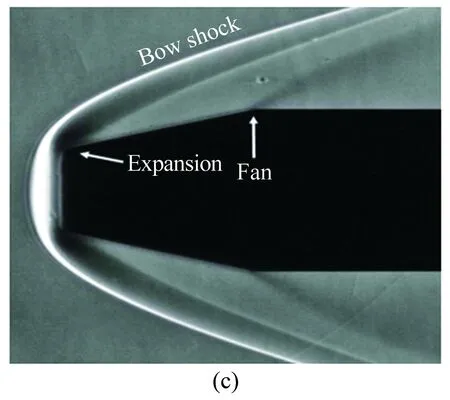
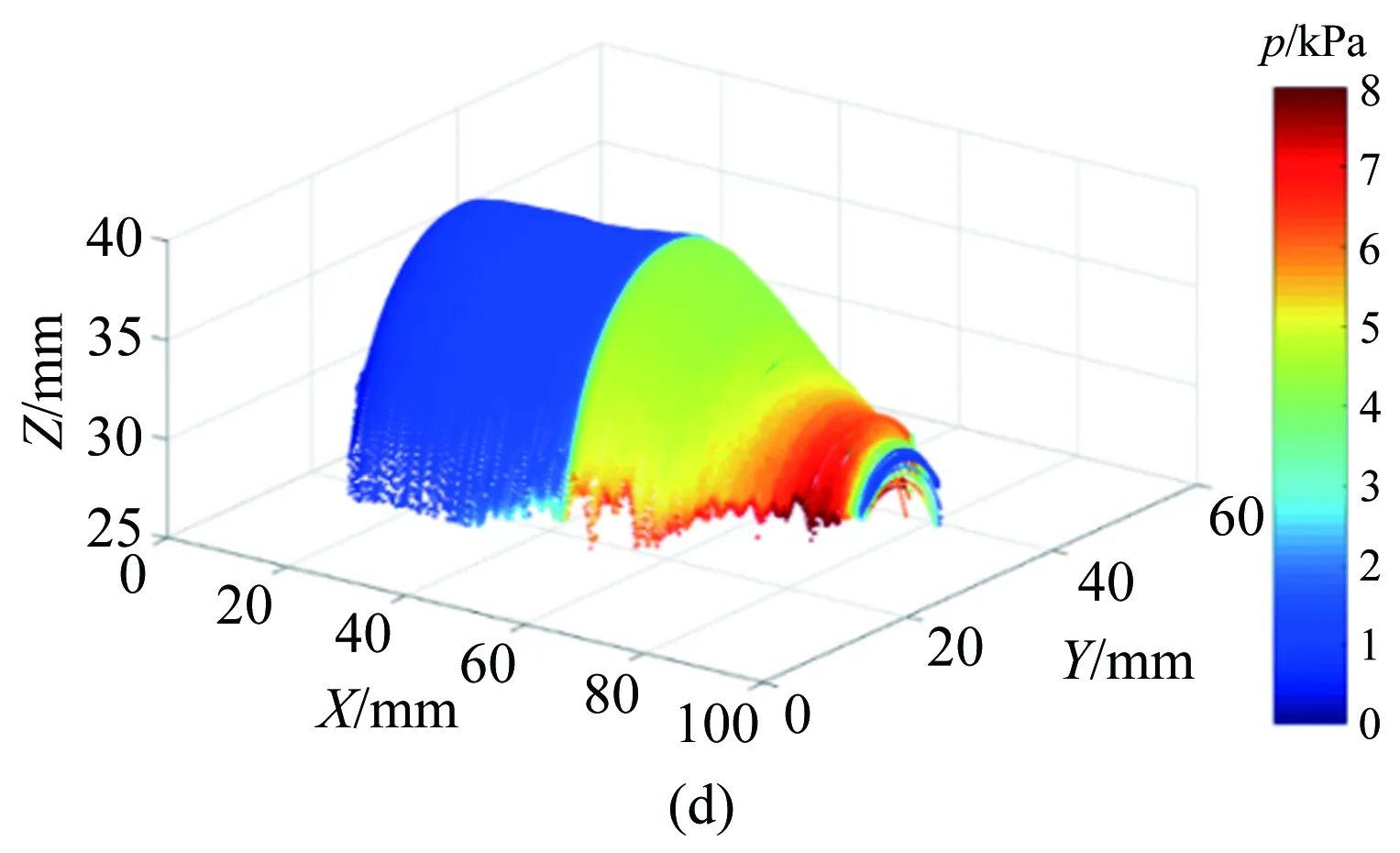
圖8 (a) 模型二維壓力分布圖;(b) 模型軸線上相對壓力分布;(c) 模型紋影圖像;(d) 模型三維壓力分布
Fig.8(a)Measured3Dsurfacepressuredistributionforthemodel, (b)pressuredistributionalongthecentralplane, (c)Schlierenimageand(d)Measured3Dsurfacepressuredistributionforthemodel
3 結 論
提出了一種全新的基于單光場相機和壓敏漆的三維表面壓力測量技術——LF-3DPSP,并以截錐體為例,在馬赫數為5的高超聲速風洞中對該技術進行了驗證性試驗研究。
(1) 相較于多相機系統,該技術僅采用單臺相機、單個視角進行三維表面的壓力測量,試驗設備和處理方法更為簡單,并且特別適用于光學空間受限情況下的復雜三維表面壓力測量;
(2) 在試驗中獲得了精度較高的大曲率三維連續表面模型尺寸,并且獲得了與紋影結果相匹配的三維連續表面壓力分布結果。
該技術采用的密集白底黑點紋理較為稀疏、簡易,后續將考慮使用更為細致復雜的投影紋理增加精度。并且在模型尺寸重構的過程中,可同時采用Wind-off和Wind-on條件下的帶紋理模型的光場圖像進行模型深度計算,經過校正后可進一步提高模型三維尺寸測量精度。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
光學精密工程(2016年6期)2016-11-07 09:07:19
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
核科學與工程(2015年4期)2015-09-26 11:59:03
