基于BP神經網絡的無刷電機控制系統的研究
2018-10-10 11:11:16呂豐李振強李澤洋彭緩緩
數字技術與應用
2018年7期
呂豐 李振強 李澤洋 彭緩緩
摘要:文章針對無刷電機速度系統固有的問題,分別設計模糊控制器和自適應BP神經網絡控制器。通過分析系統的數學模型并建立Simulink仿真平臺,對設計的控制器進行驗證。仿真結果表明,自適應BP神經網絡控制具有超調量小、調節時間短的優點。
關鍵詞:無刷電機;模糊控制;BP神經網絡
中圖分類號:TM351 文獻標識碼:A 文章編號:1007-9416(2018)07-0014-02
無刷直流電機(BLDCM)作為采用電子換向[1]的強耦合[2]的非線性系統,常規PID難以完成精確控制的任務。智能控制[3]及新型控制算法[4]已成為研究的主流,如模糊控制、神經網絡[5]等。本文對設計的兩種控制器進行仿真實驗,通過仿真證明所設計的控制器的有效性。
1 無刷直流電機的數學模型
假定BLDCM定子三相繞組120°對稱,忽略氣隙磁導和渦流損耗的影響,根據定子三相繞組的電壓方程式,由于三相對稱,,化簡電壓方程,可得狀態方程為:
2 模糊PID控制器的設計
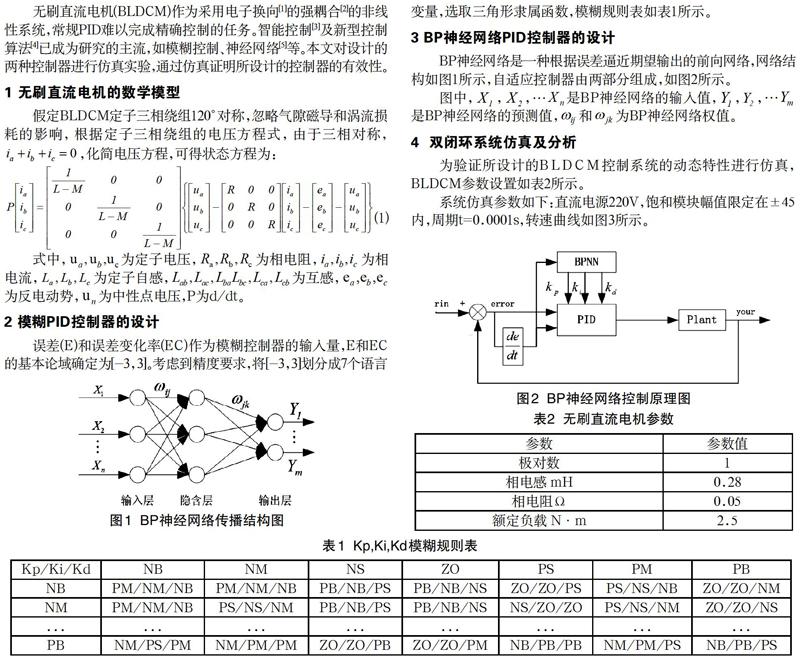
誤差(E)和誤差變化率(EC)作為模糊控制器的輸入量,E和EC的基本論域確定為[-3,3]。考慮到精度要求,將[-3,3]劃分成7個語言變量,選取三角形隸屬函數,模糊規則表如表1所示。
3 BP神經網絡PID控制器的設計
BP神經網絡是一種根據誤差逼近期望輸出的前向網絡,網絡結構如圖1所示,自適應控制器由兩部分組成,如圖2所示。
圖中,,,是BP神經網絡的輸入值,,,是BP神經網絡的預測值,和為BP神經網絡權值。
4 雙閉環系統仿真及分析
為驗證所設計的BLDCM控制系統的動態特性進行仿真,BLDCM參數設置如表2所示。
系統仿真參數如下:直流電源220V,飽和模塊幅值限定在±45內,周期t=0.0001s,轉速曲線如圖3所示。……
登錄APP查看全文
