面向環(huán)境適應(yīng)性的無人機(jī)飛行姿態(tài)模擬器設(shè)計(jì)與仿真
2018-10-15 07:25:38楊劍鋒黃創(chuàng)綿李小兵潘廣澤閆攀峰
中國測試 2018年8期
關(guān)鍵詞:模型
楊劍鋒,黃創(chuàng)綿,李小兵,潘廣澤,閆攀峰,袁 婷
(1.工業(yè)和信息化部電子第五研究所,廣東 廣州 510610;2.廣東省無人機(jī)可靠性與安全性工程技術(shù)研究中心,廣東 廣州510610;3.廣東省工業(yè)機(jī)器人可靠性工程實(shí)驗(yàn)室,廣東 廣州 510610;4.廣東省電子信息產(chǎn)品可靠性技術(shù)重點(diǎn)實(shí)驗(yàn)室,廣東 廣州 510610;5.航空工業(yè)第一飛機(jī)設(shè)計(jì)研究院,陜西 西安 710000)
0 引 言
隨著無人機(jī)技術(shù)的飛速發(fā)展及市場需求的日益增長,旋翼類無人機(jī)越來越多地被用于航拍、農(nóng)林、安防、電力等行業(yè)[1]。由于消費(fèi)級無人機(jī)技術(shù)門檻低,市場前景又巨大,缺乏統(tǒng)一制造要求,不僅一些從事航空相關(guān)配套的企業(yè)大力發(fā)展無人機(jī),許多航模企業(yè)也可通過購買零件來完成無人機(jī)的組裝。由于缺乏有效的測試方法與技術(shù),無人機(jī)可靠性與安全性水平參差不齊,因此無人機(jī)安全事故頻頻發(fā)生。目前關(guān)于無人機(jī)可靠性與安全性的測試技術(shù)相關(guān)研究較少[2-3],特別是關(guān)于無人機(jī)環(huán)境適應(yīng)性的測試方法與技術(shù)研究則更少[4],亟需相關(guān)的檢測裝置及測試方法來規(guī)范無人機(jī)市場的發(fā)展。
為了分析風(fēng)場對無人機(jī)性能的影響,美國航空航天局(NASA)的Russell等[5]研發(fā)一種綜合測試系統(tǒng)來測試無人機(jī)單個(gè)電機(jī)及整機(jī)在風(fēng)場環(huán)境下的升力隨轉(zhuǎn)速及風(fēng)速的變化情況。國防科技大學(xué)的谷新宇等[6]提出一種微小型電動無人機(jī)動力系統(tǒng)試驗(yàn)臺。北京航空航天大學(xué)的Deng等[7]提出一種關(guān)于無人機(jī)飛行安全性控制與地面測試的思想,通過利用地面測試數(shù)據(jù)對無人機(jī)飛行安全進(jìn)行評估與認(rèn)證來提高無人機(jī)的飛行安全性。以上研究大都從無人機(jī)性能和安全性提升的角度開展的,而關(guān)于無人機(jī)環(huán)境適應(yīng)性測試裝置的研究則較少。對于消費(fèi)級無人機(jī),常見的環(huán)境適應(yīng)性測試項(xiàng)目包括:溫度、抗風(fēng)等級、低氣壓等[8],目前的測試手段由于受到技術(shù)條件及成本的限制,無人機(jī)只能固定與溫度或低氣壓試驗(yàn)箱中進(jìn)行測試,無法進(jìn)行飛行狀態(tài)的測試,或者固定于試驗(yàn)箱中進(jìn)工作時(shí)溫度及低氣壓適應(yīng)性的測試,該試驗(yàn)方法無法真正得到無人機(jī)的飛行性能水平。
基于此,本文提出一種用于模擬無人機(jī)飛行姿態(tài)的模擬器。該模擬器可以通過輸入飛行任務(wù)剖面實(shí)時(shí)模擬無人機(jī)的飛行姿態(tài),并利用ADAMS和Matlab/Simulink對該姿態(tài)模擬器進(jìn)行聯(lián)合仿真分析[9]。
1 飛行姿態(tài)模擬器結(jié)構(gòu)及使用場景
1.1 模擬器結(jié)構(gòu)設(shè)計(jì)
對于飛行器來說,其空間飛行位置信息可以用橫向(sway)、升沉(heave)、縱向(surge)來表示,姿態(tài)信息可以用俯仰(pitch)、偏航(yaw)、橫搖(roll)來表示,見圖1。由圖可知,如果要模擬飛行器的飛行姿態(tài),飛行模擬器的自由度至少為3個(gè),但對于四旋翼無人機(jī)而言,由于其俯仰角與橫搖角相同,而且對于飛行試驗(yàn)來說,影響較小,因此飛行器模擬器只需兩個(gè)自由度即可滿足四旋翼無人機(jī)的飛行姿態(tài)模擬要求。本文設(shè)計(jì)無人機(jī)飛行姿態(tài)模擬器的結(jié)構(gòu)如圖2,該模擬器主要包括偏航軸系統(tǒng)、俯仰軸系統(tǒng)和無人機(jī)負(fù)載平臺,其中偏航軸系統(tǒng)由偏航軸伺服電機(jī)、偏航軸減速器、偏航軸制動器、偏航軸聯(lián)軸器、圓錐滾子軸承等部件組成,俯仰軸系統(tǒng)由俯仰軸伺服電機(jī)、俯仰軸減速器、俯仰軸聯(lián)軸器、滾珠軸承等部件組成。工作原理:當(dāng)飛行姿態(tài)模擬器未通電時(shí),俯仰軸與偏航軸上的制動因斷電而自鎖,當(dāng)在上位機(jī)輸入無人機(jī)的飛行姿態(tài)曲線時(shí),伺服控制器控制俯仰軸與偏航軸上的伺服電機(jī)進(jìn)行聯(lián)動,同時(shí)帶動各軸上的減速器進(jìn)行旋轉(zhuǎn),從而驅(qū)動無人機(jī)負(fù)載平臺進(jìn)行俯仰與偏航角的轉(zhuǎn)動,進(jìn)而模擬無人機(jī)的實(shí)時(shí)飛行姿態(tài)。

圖1 飛行器空間位姿信息表示方法
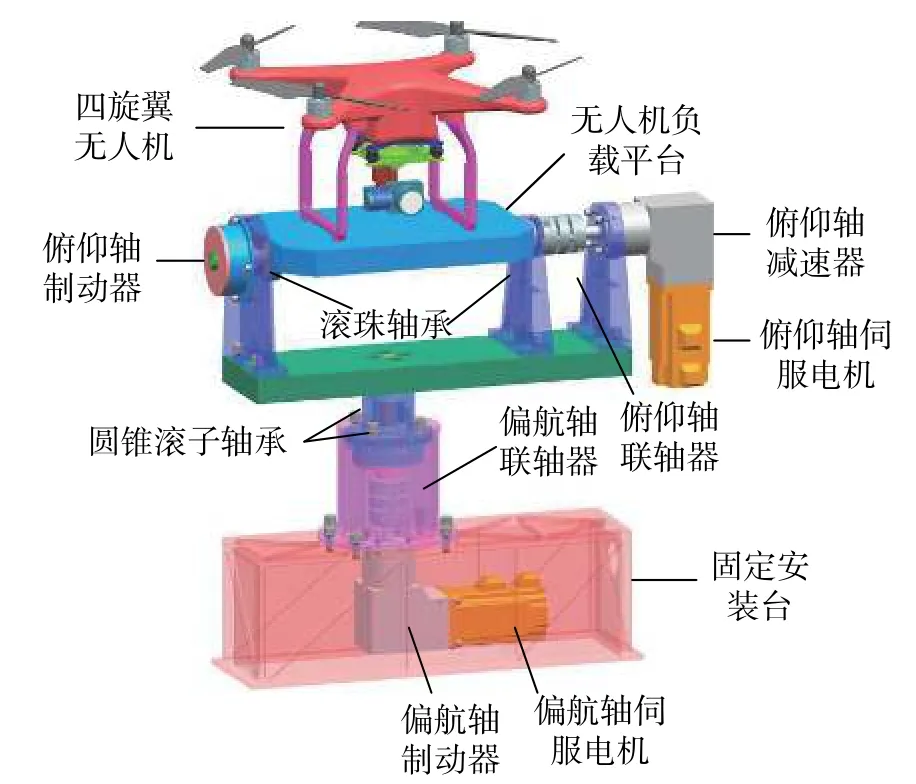
圖2 無人機(jī)飛行姿態(tài)模擬器結(jié)構(gòu)
1.2 飛行姿態(tài)模擬器使用場景
本文研制的無人機(jī)飛行模擬器的主要目的是模擬四旋翼無人機(jī)的飛行姿態(tài),通過與其他環(huán)境試驗(yàn)設(shè)備協(xié)同配合,可以用來測試無人機(jī)飛行時(shí)的環(huán)境適應(yīng)性。圖3為無人機(jī)飛行姿態(tài)模擬器放置在溫度-濕度-高度三綜合試驗(yàn)箱中對無人機(jī)的溫度、濕度、高海拔的環(huán)境適應(yīng)性進(jìn)行測試。該使用場景可以測試無人機(jī)在不同飛行姿態(tài)下對溫度-濕度-高度綜合應(yīng)力環(huán)境的適應(yīng)能力,其中溫度-濕度-高度三綜合試驗(yàn)箱由廣州五所環(huán)境儀器有限公司生產(chǎn),可滿足GJB 150.2A——2009相關(guān)試驗(yàn)標(biāo)準(zhǔn)。同時(shí)本文研制的飛行姿態(tài)模擬器也可以放置在臺風(fēng)淋雨系統(tǒng)(該系統(tǒng)為本實(shí)驗(yàn)室開發(fā)研制)中對無人機(jī)的抗風(fēng)及抗雨性能進(jìn)行飛行測試,如圖4所示。該使用場景可以測試無人機(jī)在不同飛行姿態(tài)下應(yīng)對吹風(fēng)與淋雨的適應(yīng)能力,其中臺風(fēng)淋雨系統(tǒng)由課題組開發(fā),最大風(fēng)速可達(dá) 28.5 ~ 32.6 m/s,可滿足 GJB 150.8A——2009淋雨試驗(yàn)的相關(guān)標(biāo)準(zhǔn)。
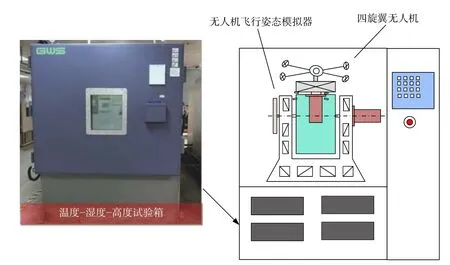
圖3 無人機(jī)飛行姿態(tài)模擬器置于三綜合試驗(yàn)箱
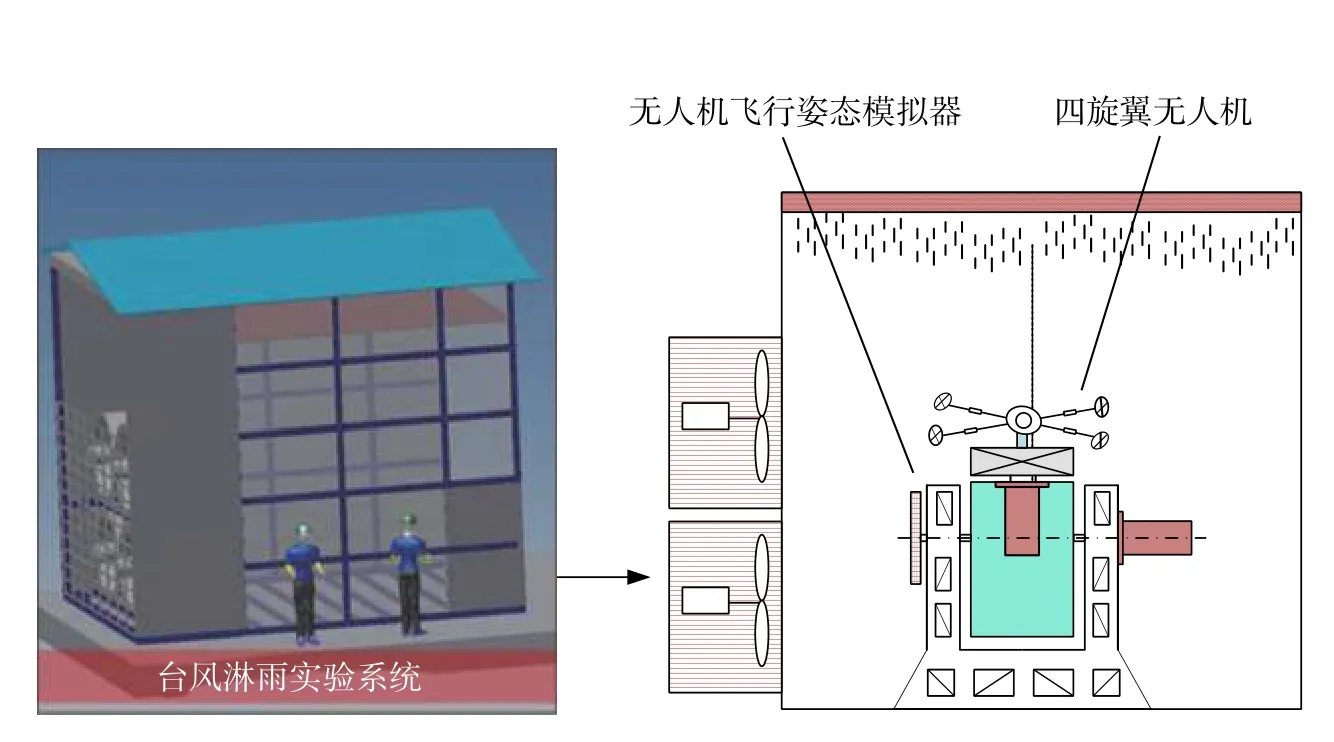
圖4 無人機(jī)飛行姿態(tài)模擬器置于臺風(fēng)淋雨系統(tǒng)
2 聯(lián)合仿真技術(shù)方案
本文利用ADAMS與Matlab/Simulink[10-11]進(jìn)行聯(lián)合仿真分析,利用Simulink進(jìn)行控制系統(tǒng)的設(shè)計(jì),來控制ADAMS[12]中的虛擬樣機(jī)模型,并對仿真結(jié)果進(jìn)行分析,從而優(yōu)化設(shè)計(jì)。圖5為聯(lián)合仿真的技術(shù)方案框架圖,首先通過CAD軟件建立機(jī)械系統(tǒng)的數(shù)字樣機(jī)模型;接著利用多體系統(tǒng)仿真軟件建立機(jī)械系統(tǒng)的虛擬樣機(jī),在虛擬樣機(jī)里定義好監(jiān)控參數(shù)及接口變量,并生成Matlab/Simulink能識別的狀態(tài)空間方程;然后在Matlab/Simulink建立機(jī)械系統(tǒng)的控制系統(tǒng)模型,設(shè)置好仿真參數(shù),并在Matlab的工作空間中定義好ADAMS生成的狀態(tài)空間方程的環(huán)境變量;最后進(jìn)行仿真分析,該仿真方法可以實(shí)現(xiàn)Matlab/Simulink與ADAMS生成的狀態(tài)空間方程之間數(shù)據(jù)的雙向傳遞,仿真的核心思想為利用Matlab/Simulink進(jìn)行控制系統(tǒng)的仿真,ADAMS進(jìn)行虛擬機(jī)械系統(tǒng)的仿真,相互之間的橋梁為狀態(tài)空間方程,以此達(dá)到仿真結(jié)果與實(shí)際結(jié)果一致性最大化的目標(biāo)。
3 伺服控制系統(tǒng)工作原理
無人機(jī)飛行姿態(tài)模擬器的偏航軸與俯仰軸的控制原理相同,其控制框圖見圖6所示。將轉(zhuǎn)軸的轉(zhuǎn)動角速度設(shè)置為伺服系統(tǒng)的控制目標(biāo)變量,比較偏航軸的實(shí)際速度與目標(biāo)速度之間的誤差;根據(jù)控制系統(tǒng)電壓-扭矩的傳遞函數(shù)計(jì)算得到伺服電機(jī)的輸出扭矩,通過伺服電機(jī)對偏航軸的工作速度進(jìn)行調(diào)整,并將速度信息反饋給伺服控制系統(tǒng),進(jìn)行反饋,形成閉環(huán)控制。
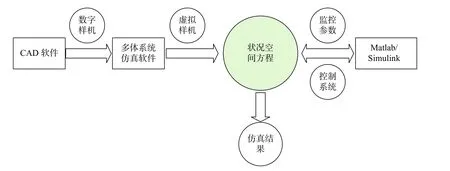
圖5 聯(lián)合仿真技術(shù)方案框架圖

圖6 伺服控制系統(tǒng)框圖
根據(jù)直流伺服電機(jī)的工作原理,可得電機(jī)的電壓-角位移傳遞函數(shù),如圖7所示。圖中Va、Ia、Ra、La分別為伺服電機(jī)控制回路的工作電壓、電流、電阻和電感;Cm和Ce分別為伺服電機(jī)轉(zhuǎn)矩系統(tǒng)和電動勢系數(shù);J為電機(jī)軸總轉(zhuǎn)動慣量;Md為電機(jī)軸輸出扭矩;Mf為電機(jī)軸摩擦扭矩;ω和θ分別伺服電機(jī)軸角速度和角位移。
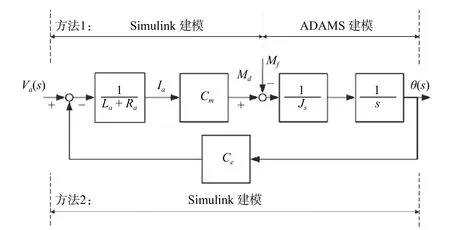
圖7 俯仰軸伺服電機(jī)控制策略框圖
對于圖7的控制策略有兩種仿真建模方法,方法1為伺服電機(jī)的電壓-扭矩傳遞函數(shù)在Matlab/Simulink中建立,輸出扭矩-角位移傳遞函數(shù)在ADAMS中建立。方法2為從伺服電機(jī)的輸入電壓到俯仰軸轉(zhuǎn)動角位移之間的傳遞函數(shù)建模全部在Matlab/Simulink中完成。方法1與方法2相比,其好處是可以充分考慮伺服電機(jī)的轉(zhuǎn)動慣量及摩擦扭矩對控制系統(tǒng)的影響。
方法1中伺服電機(jī)電壓-扭矩的傳遞函數(shù)可以表示為

方法2中伺服電機(jī)電壓-角位移傳遞傳輸可以表示為
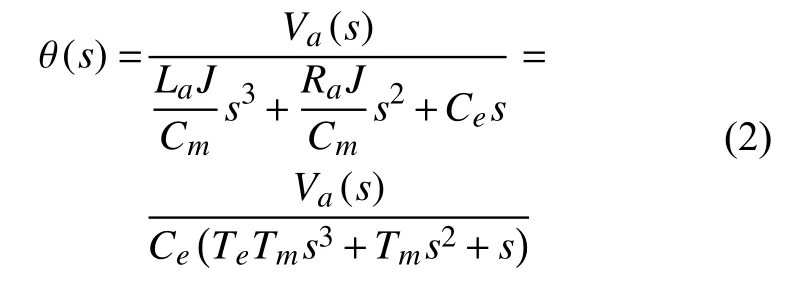
其中Te和Tm分別為伺服電機(jī)控制回路電磁時(shí)間常數(shù)和電機(jī)常數(shù),Te=La/Ra,Tm=RJa/CeCm。本文機(jī)-電系統(tǒng)聯(lián)合仿真伺服控制系統(tǒng)的實(shí)現(xiàn)采用方法1,根據(jù)式(1)在Matlab/Simulink中建立伺服電機(jī)的控制系統(tǒng)。
4 ADAMS與Simulink聯(lián)合仿真
4.1 聯(lián)合仿真模型構(gòu)建
在ADAMS/View中建立飛行姿態(tài)模擬器的虛擬樣機(jī)模型,為簡化仿真模型,刪除所有連接件,并對材料參數(shù)相同的零部件進(jìn)行了布爾合并處理,具體模型見圖8所示。為實(shí)現(xiàn)與Matlab/Simulink之間數(shù)據(jù)的雙向傳輸,在ADAMS模型中定義輸入和輸出變量,輸入狀態(tài)變量為偏航軸力矩(.MODEL_1.Yaw_torque)和俯仰軸力矩(.MODEL_1.Pitch_torque);輸出狀態(tài)變量為偏航軸角位移(.MODEL_1.Yaw_Angle)、偏航軸角速度(.MODEL_1.Yaw_Angle Velovity)、俯仰軸角位移(.MODEL_1.Pitch_ Angle)、俯仰軸角速度(.MODEL_1.Pitch_ AngleVelovity)。利用ADAMS/Controls模塊將建立的虛擬樣機(jī)模型轉(zhuǎn)成狀態(tài)空間方程,并采用Simulink建立飛行姿態(tài)模擬器建立偏航軸和俯仰軸的PID伺服控制模型。在Matlab環(huán)境下建立聯(lián)合仿真控制系統(tǒng)模型,該仿真模型包括俯仰軸伺服控制單元、偏航軸伺服控制單元、狀態(tài)空間方程接口模塊等3部分內(nèi)容,如圖9所示。偏航軸與俯仰軸的伺服控制系統(tǒng)相同,已俯仰軸為分析對象介紹了控制系統(tǒng)的基本特性,表1給出了俯仰軸伺服系統(tǒng)的基本工作參數(shù)。
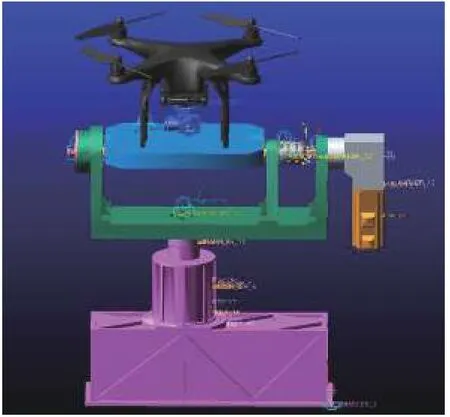
圖8 無人機(jī)飛行姿態(tài)模擬器虛擬樣機(jī)
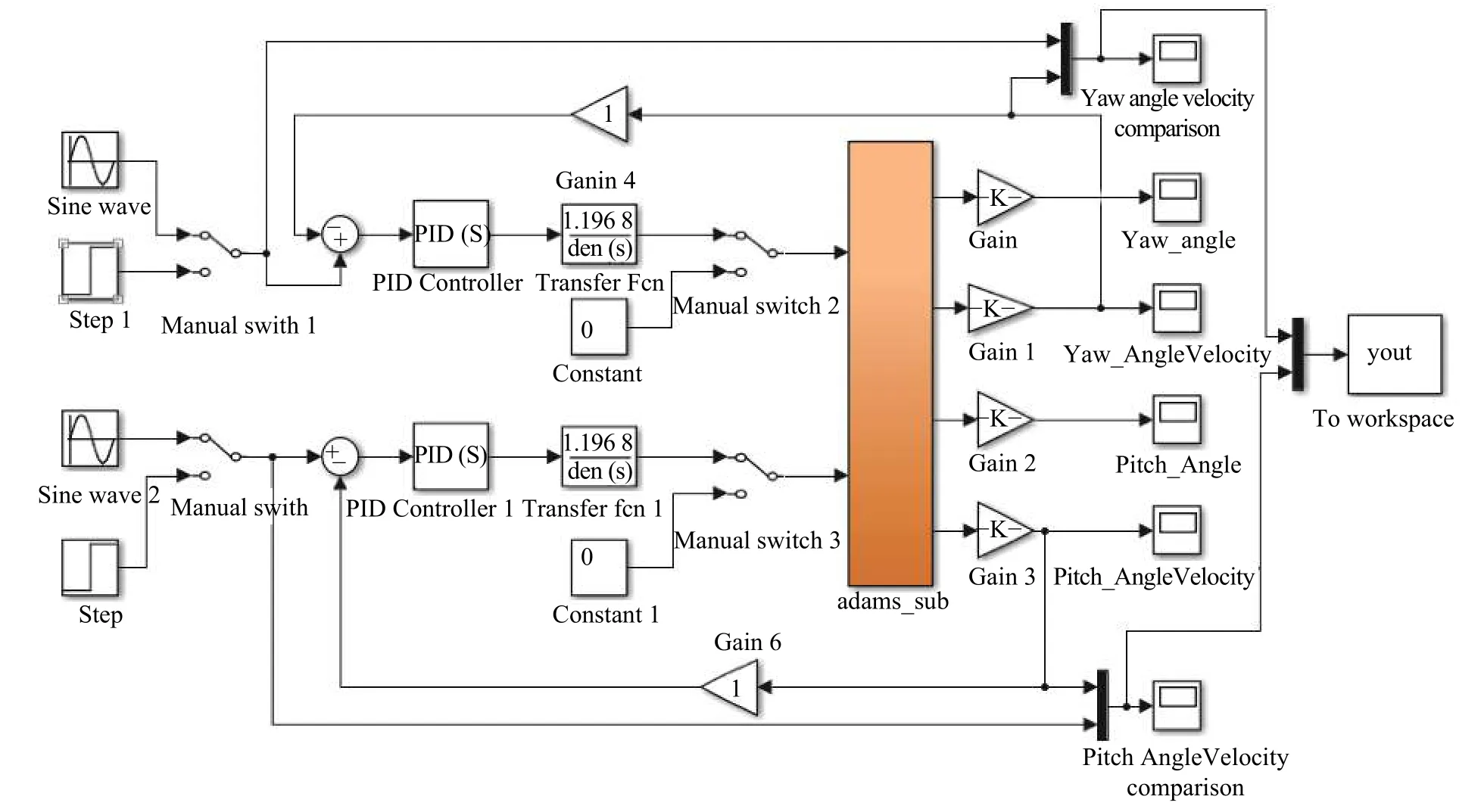
圖9 無人機(jī)飛行姿態(tài)模擬器控制系統(tǒng)模型
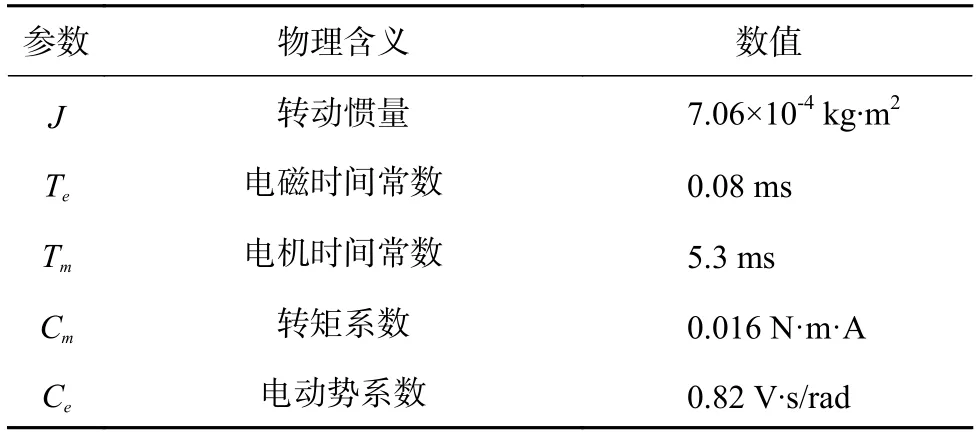
表1 俯仰軸伺服控制系統(tǒng)基本參數(shù)
4.2 聯(lián)合仿真分析
在Matlab/Simulink求解器中設(shè)置數(shù)值分析方法為 ode3(Bogack–Shampine),采用固定步長,采樣時(shí)間為0.001 s,動畫模式為交互式,仿真模式為離散式。采用方法1進(jìn)行伺服控制,分別設(shè)置目標(biāo)信號為階躍信號和正弦信號,得到偏航軸和俯仰軸的角速度響應(yīng)及誤差曲線,見圖10和圖11所示。由圖10(a)可知,當(dāng)目標(biāo)函數(shù)為階躍函數(shù)時(shí),偏航軸伺服控制系統(tǒng)的超調(diào)量為8.25%,調(diào)整時(shí)間約為0.7 s,調(diào)整誤差小于2%。由圖11(a)可知,俯仰軸伺服控制系統(tǒng)的超調(diào)量為4.49%,調(diào)整時(shí)間為0.75 s,調(diào)整誤差小于2%。設(shè)置偏航軸與俯仰軸的目標(biāo)角速度都為 10 sin(0.4π·t)(°/s),可以得到偏航軸與俯仰軸的仿真曲線,見圖10(b)和圖11(b)所示。由圖可知,在跟蹤目標(biāo)正弦信號的開始階段,由于系統(tǒng)跟蹤存在調(diào)整時(shí)間,跟蹤曲線存在一定的延時(shí),但考慮本機(jī)械系統(tǒng)為飛行姿態(tài)模擬器,只須復(fù)現(xiàn)目標(biāo)曲線即可,延時(shí)對于測試結(jié)果影響較小,因此本文設(shè)計(jì)的PID伺服控制系統(tǒng)具有較好的波形復(fù)現(xiàn)性能。
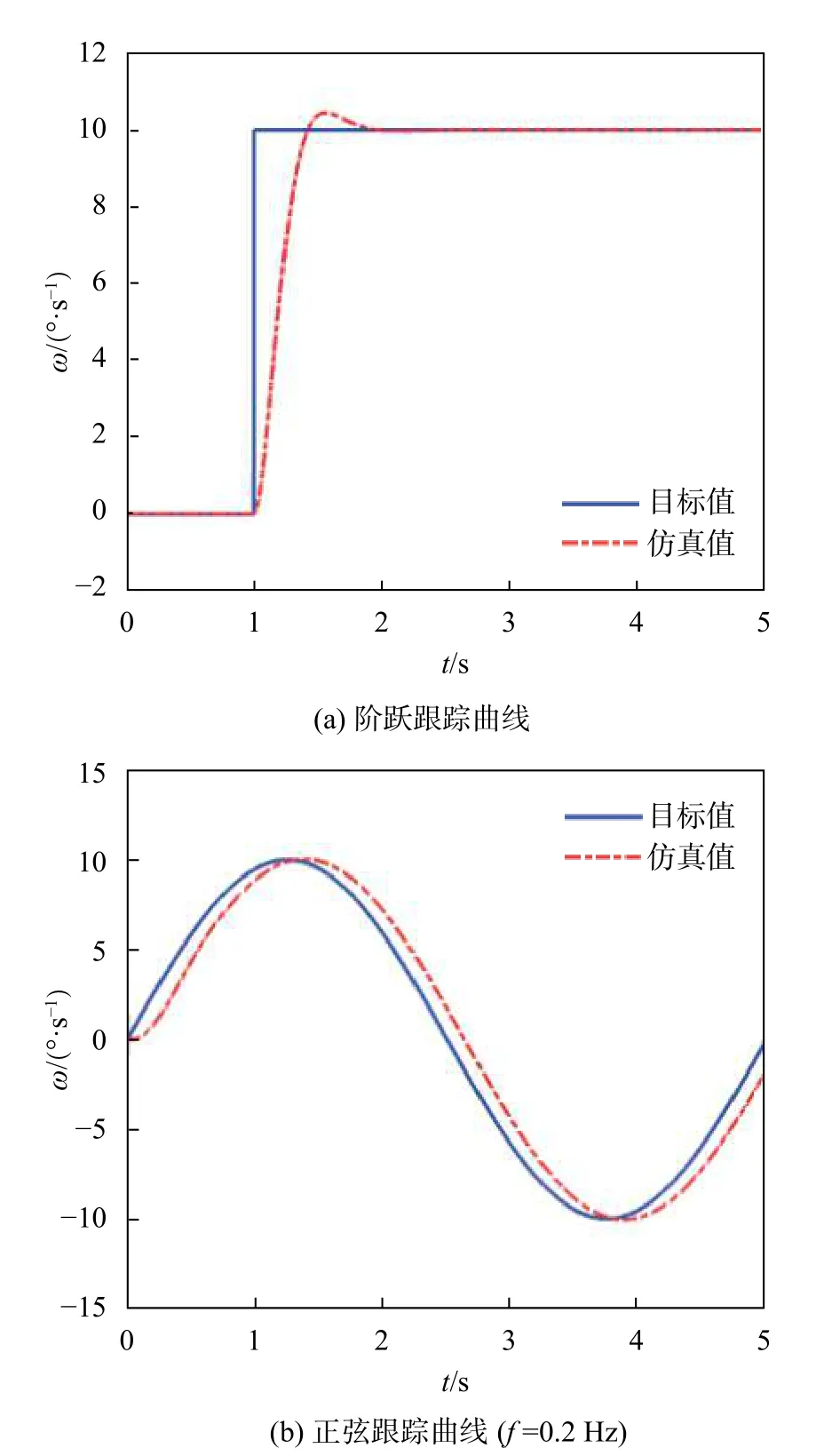
圖10 偏航軸仿真曲線
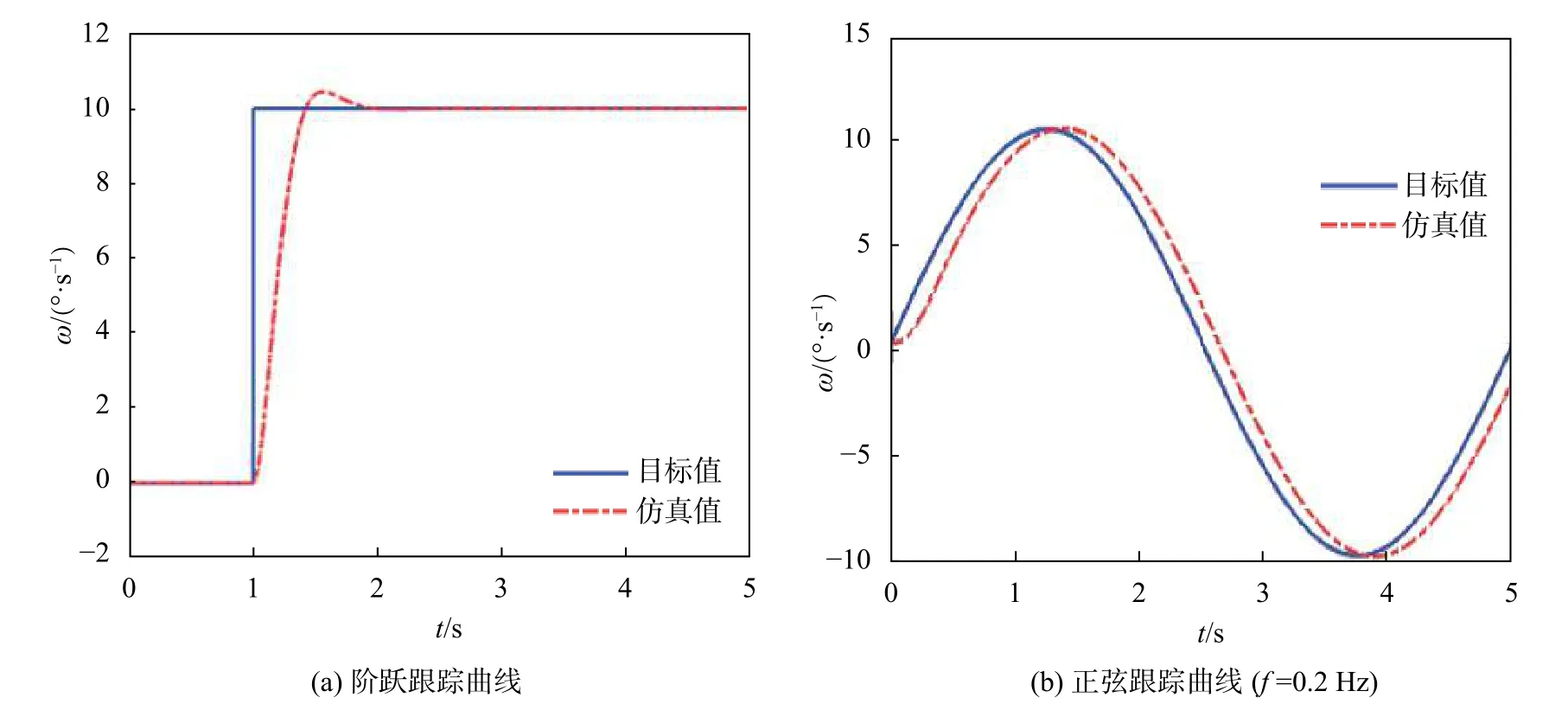
圖11 俯仰軸仿真曲線
5 結(jié)束語
本文提出一種面向環(huán)境適應(yīng)性的無人機(jī)飛行姿態(tài)模擬器,對該模擬器的伺服控制系統(tǒng)的工作原理進(jìn)行了詳細(xì)闡述。文中提出兩種仿真方法,比較了其優(yōu)缺點(diǎn),并利用ADAMS與Matlab/Simulink對設(shè)計(jì)的飛行姿態(tài)模擬器進(jìn)行了聯(lián)合仿真,仿真結(jié)果表明:本文設(shè)計(jì)的飛行姿態(tài)模擬器整體機(jī)械結(jié)構(gòu)及伺服控制系統(tǒng)對目標(biāo)角速度曲線具有較高的復(fù)現(xiàn)能力,能較好地模擬旋翼類無人機(jī)的飛行姿態(tài)。同時(shí),本文提出的聯(lián)合仿真方法可為復(fù)雜機(jī)-電系統(tǒng)的設(shè)計(jì)與開發(fā)提供可靠依據(jù),具有實(shí)際的工程價(jià)值和現(xiàn)實(shí)意義。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
