基于自適應觀測器的四旋翼無人飛行器多傳感器故障診斷方法
2018-10-16 08:23:52王日俊曾志強段能全黨長營杜文華王俊元
計算機應用 2018年9期
王日俊,白 越,曾志強,段能全,黨長營,杜文華,王俊元
(1.中北大學 機械工程學院,太原 030051; 2.中國科學院 長春光學精密機械與物理研究所,長春 130033)
0 引言
四旋翼無人飛行器具有結(jié)構(gòu)簡單、穩(wěn)定性高以及起降靈活等特點,在軍事和民用領(lǐng)域得到了極大關(guān)注與廣泛應用[1-2]。搭載于飛行器上的慣性測量單元(Inertial Measurement Unit, IMU)在其導航信息獲取與姿態(tài)運動控制中起著至關(guān)重要的作用,是保證飛行器安全可靠飛行、執(zhí)行各類飛行任務的前提[3]。然而,機載環(huán)境的溫度變化、機械振動等因素的存在使得IMU傳感器元件極易損傷或失效,由此導致的傳感器故障時有發(fā)生[4-5]。傳感器一旦發(fā)生故障不僅會嚴重影響飛行的安全性和可靠性,導致飛行任務的失敗,甚至會危及地面人員的生命安全,因此對于飛行器傳感器故障檢測與診斷技術(shù)的研究就成為了提高飛行器的安全性和可靠性的迫切任務。
目前大多數(shù)應用于四旋翼無人飛行器的故障診斷方法都只涉及執(zhí)行器故障,而傳感器故障檢測和隔離(Fault Detection and Isolation, FDI)的研究成果仍然有限[6]。在文獻[7]提出傳感器故障全局觀測器方法之后,相關(guān)研究人員逐漸將多種觀測器或估計器方法應用于四旋翼無人飛行器的傳感器故障檢測與隔離的研究工作中,包括基于線性參數(shù)變化自適應觀測器[8]、集員估計器[9],非線性狀態(tài)觀測器[10]和降階非線性觀測器[11]等。Freddi等[12]采用基于全姿態(tài)測量的Thau觀測器實現(xiàn)了加速度計偏差故障的檢測。在假設(shè)四旋翼無人飛行器的平移加速度為零時,Berbra等[13]提出了一種陀螺儀、加速度計和磁力計故障的檢測方法。此外,利用卡爾曼濾波(Kalman Filter, KF)方法同時估計四旋翼飛行器狀態(tài)和傳感器偏差,也取得了一定的效果[14-15];然而,對非線性系統(tǒng)參數(shù)估計的擴展卡爾曼濾波(Extended Kalman Filter, EKF)或無跡卡爾曼濾波(Unscented Kalman Filter, UKF)的穩(wěn)定性分析是非常困難的,引入的額外的系統(tǒng)狀態(tài)變量代表未知的傳感器故障參數(shù),使其難以滿足有限的傳感器測量的可觀測條件。
本文針對四旋翼無人飛行器的加速度計和陀螺儀傳感器的多故障檢測問題,提出一種基于非線性自適應觀測器的多傳感器故障檢測與故障偏差估計方法。該方法利用非線性故障觀測器實現(xiàn)多故障的檢測與隔離,基于非線性自適應觀測器同時對多個未知故障的大小進行估計,從而提高飛行器的容錯能力,保證飛行的安全性和可靠性。
1 系統(tǒng)描述
四旋翼無人飛行器的結(jié)構(gòu)如圖1所示。
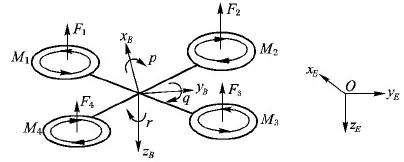
圖1 四旋翼無人飛行器的結(jié)構(gòu)
圖中,OxByBzB為機體坐標系,原點O取飛行器的質(zhì)心。OxEyEzE為慣性坐標系,慣性坐標系的原點與飛行器起飛位置時機體坐標系的原點重合。Mi(i=1,2,…,4)為4組由直流電機和旋翼組成的執(zhí)行機構(gòu),其中,M2、M4順時針旋轉(zhuǎn),M1、M3逆時針旋轉(zhuǎn)。Fi(i=1,2,…,4)為4個執(zhí)行機構(gòu)提供的升力。飛行器通過調(diào)整4個旋翼之間的轉(zhuǎn)速差來完成各個方向上的姿態(tài)轉(zhuǎn)動控制。
由牛頓-歐拉運動學方程得到的四旋翼無人器動力學模型[16]可描述為:
(1)

(2)
Rη(φ,θ)表示機體坐標系下旋轉(zhuǎn)速度到姿態(tài)角的角速度的轉(zhuǎn)換矩陣,且:
(3)
四旋翼無人飛行器通常搭載有成本低、質(zhì)量輕的微機電系統(tǒng)(Micro-Electro-Mechanical System, MEMS)傳感器如3軸陀螺儀、加速度計等作為其慣性測量單元(Inertial Measurement Unit, IMU)。這些傳感器在四旋翼無人飛行器的導航信息獲取與姿態(tài)運動控制中起著至關(guān)重要的作用。通常,加速度計與陀螺儀的測量值可表示為:
ya(t)=a(t)+λa(t-ta)ba+na(t)
(4)
yω(t)=ω(t)+λω(t-tω)bω+nω(t)
(5)
其中:ya(t)為實際加速度計測量值,yω(t)為實際陀螺儀測量值,ba為加速度計測量中的故障偏差值,bω為陀螺儀測量中的故障偏差值,na(t)、nω(t)分別為加速度計和陀螺儀的測量噪聲。a(t)表示無偏差故障與測量噪聲時加速度計測量值,且:
(6)
ta、tω分別為加速度計和陀螺儀故障的發(fā)生時刻,λa(t-ta),λω(t-tω)是關(guān)于故障時間的階躍函數(shù),即:
(7)
(8)
在實際的應用中,當加速度計和陀螺儀發(fā)生故障后,故障偏差值ba、bω的大小會隨時間緩慢地變化,但在短時間內(nèi)的偏差值的變化量很小[17],因此,在考慮的短時間持續(xù)時間內(nèi)可認為故障偏差值是恒定的。于是有如下假設(shè)。
假設(shè)1 加速度計和陀螺儀的故障偏差值ba和bω均為有界的常數(shù),即:
(9)
(10)

假設(shè)2 在式(4)和(5)中定義的測量噪聲na(t)、nω(t)均為有界的零均值信號,且E(na(t))=0,E(nω(t))=0,E(·)為期望算子。
另外,假設(shè)慣性坐標系下四旋翼無人飛行器的位置和偏航角可測量得到,則整個系統(tǒng)模型的輸出方程可表示為:
yp(t)=pE(t)+dp(t)
(11)
其中:dp(t)為零均值測量噪聲,且E(dp(t))=0。
2 多傳感器故障檢測與診斷系統(tǒng)
將如式(5)和(6)所示的傳感器模型代入四旋翼無人飛行器動力學模型有:
(12)
從式(12)可知,加速度計測量中的偏差只出現(xiàn)在表示位置和速度的動力學方程中,而陀螺儀測量中的偏差只出現(xiàn)在表示歐拉角和角速率動力學方程中,因此,傳感器測量中的偏差的影響可以被視為虛擬的執(zhí)行器故障。此外,在四旋翼無人飛行器的狀態(tài)方程中,兩種傳感器故障互不影響,相互之間不存在耦合現(xiàn)象。
根據(jù)上述分析,本文所設(shè)計的四旋翼無人飛行器的多傳感器故障檢測與診斷系統(tǒng)(Fault Detection and Diagnosis,F(xiàn)DD)系統(tǒng)結(jié)構(gòu)如圖2所示。根據(jù)FDD系統(tǒng)實現(xiàn)的功能可將結(jié)構(gòu)分為故障檢測與隔離FDI和故障偏差值估計(Fault Bias Estimation, FBE)兩部分。圖中控制器的輸出信號與傳感器的測量值作為FDI的輸入。通常情況下,兩個FDI分別用來實現(xiàn)加速度計和陀螺儀測量過程中故障的檢測與隔離,一旦其中某一故障被檢測到并隔離,便會激活與之對應的FEB完成對故障偏差值的估計,從而增強飛行器控制系統(tǒng)的容錯能力,保證飛行器的穩(wěn)定性與安全性。

圖2 多傳感器故障檢測與診斷系統(tǒng)結(jié)構(gòu)
2.1 傳感器的故障觀測器設(shè)計
2.1.1 加速度計故障觀測器
由式(12)可知,四旋翼無人飛行器的質(zhì)心運動方程可表示為:
(13)

設(shè)計如下加速度計故障觀測器:
(14)


(15)



(16)

(17)
2.1.2 陀螺儀故障觀測器
根據(jù)式(12),設(shè)計如下陀螺儀故障觀測器:
(18)

(19)
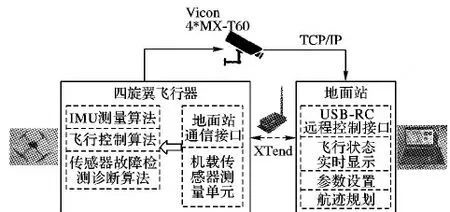
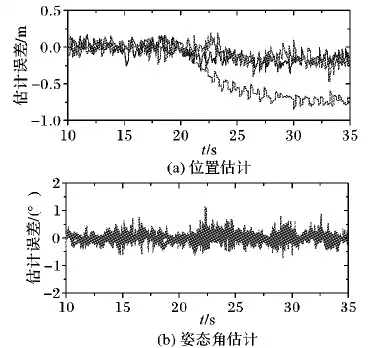
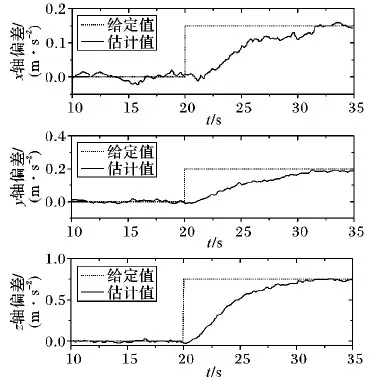
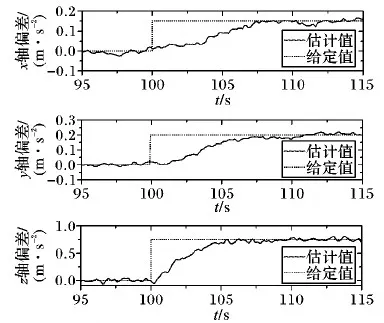
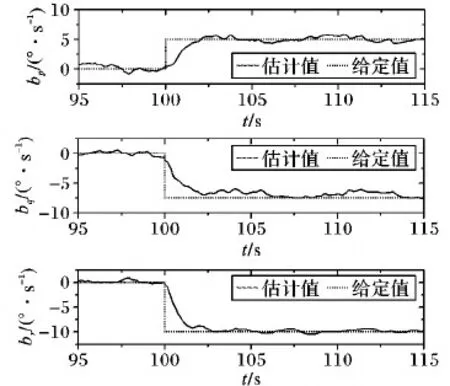
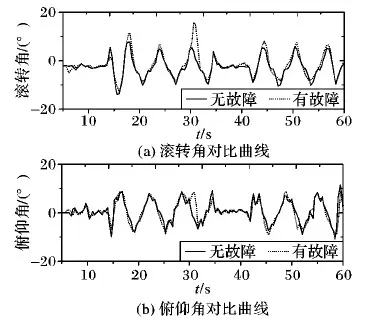
當t hω(t)+eω(t) (20) (21) 2.2.1 加速度計故障偏差觀測器 根據(jù)式(12),用以估計加速度計故障偏差值的非線性自適應觀測器可表示為: (22) (23) 其中Δ是一個對稱正定的學習率矩陣。 關(guān)于所設(shè)計參數(shù)自適應律的穩(wěn)定性存在如下定理。 定理1 假設(shè)加速度計傳感器發(fā)生故障在ta時,在Ta時刻檢測到故障,且Ta>ta>0,那么,對于在任意t>Ta時,如果存在常數(shù)α1≥α0>0和T0>0,有: (24) (25) (26) (27) (28) 對式(27)進行期望值的計算,結(jié)合E(na(t))=0和E(dp(t))=0,可得: (29) (30) 2.2.2 陀螺儀故障偏差觀測器 根據(jù)式(12),基于Lyapunov方法設(shè)計用以估計陀螺儀故障偏差的自適應觀測器為: (31) 為了保證參數(shù)的收斂性,Rη(φ,θ)需滿足如下條件: (32) 證明 如式(31)所示的自適應觀測器的狀態(tài)與參數(shù)的估計誤差可表示為: (33) 由假設(shè)2有,nω有界,則擾動項Rη(φ,θ)nω也有界,顯然式(33)中的信號均有界。對式(33)進行期望值的計算,結(jié)合E(nω(t))=0,可得: (34) (35) 搭建的室內(nèi)實驗平臺系統(tǒng)結(jié)構(gòu)如圖3所示。整個系統(tǒng)由課題組研制的四旋翼無人飛行器、Vicon運動捕捉系統(tǒng)以及地面站三部分組成。在飛行過程中,四旋翼無人飛行器的姿態(tài)信息和位置信息通過Vicon運動捕捉系統(tǒng)獲取,采樣頻率1 Hz,通過TCP/IP協(xié)議實現(xiàn)與地面站的通信。地面站通過XTend遠距離射頻模塊連接四旋翼無人飛行器,實現(xiàn)數(shù)據(jù)快速可靠的傳輸與參數(shù)的在線調(diào)整。 圖3 室內(nèi)實驗平臺系統(tǒng)結(jié)構(gòu)框圖 圖4 故障設(shè)置時序 圖5 加速度計故障檢測 圖6 加速度計故障偏差估計 圖7 陀螺儀故障檢測 在檢測加速度計和陀螺儀同時發(fā)生故障后,對應的偏差觀測器對故障偏差值的估計結(jié)果分別如圖9和圖10所示。其中,圖9為對加速度計故障偏差的估計結(jié)果,圖10為對陀螺儀故障偏差的估計結(jié)果。可以看出,本文提出的故障診斷方法能夠?qū)崿F(xiàn)對多傳感器故障偏差的快速估計與有效跟蹤。 圖8 陀螺儀故障偏差估計 圖9 同時故障時加速度計故障偏差估計 圖10 同時故障時陀螺儀故障偏差估計 為了驗證多傳感器故障條件下飛行器控制的穩(wěn)定性,設(shè)定飛行器的飛行軌跡為矩形,在無故障條件進行飛行,得到的姿態(tài)角曲線如圖11中的實線所示。在t=30 s時,在加速計和陀螺儀測量過程中引入固定偏差故障,得到有故障條件下的姿態(tài)角曲線如圖11中的虛線所示。 從圖中可以看出,相對于無故障發(fā)生時,在30 s的故障發(fā)生時姿態(tài)角會發(fā)生短暫的波動,本文設(shè)計的觀測器能夠檢測到故障的發(fā)生并將其隔離,之后得到的姿態(tài)角與無故障時基本一致,從而保證飛行器的穩(wěn)定可靠飛行。 圖11 同時故障時姿態(tài)角對比曲線 構(gòu)造快速、準確的傳感器故障診斷環(huán)節(jié)是提高四旋翼無人飛行器系統(tǒng)的容錯能力,保證其在飛行作業(yè)過程中安全飛行的重要基礎(chǔ)。本文針對四旋翼無人飛行器多傳感器故障的診斷問題,設(shè)計了基于自適應觀測器的多傳感器故障診斷方法。對所提出的診斷方法進行了理論分析,并通過數(shù)值仿真和實際飛行驗證了所提出方法的有效性。實驗結(jié)果表明所設(shè)計的故障觀測器可快速地檢測到故障的發(fā)生位置,并實現(xiàn)故障隔離。在多傳感器發(fā)生故障后,自適應故障偏差觀測器能夠準確估計各傳感器故障偏差值,有效地提高了飛行器的可靠性和安全性。





2.2 傳感器故障偏差的非線性自適應觀測器設(shè)計









3 實驗研究


3.1 加速度計故障實驗

3.2 陀螺儀故障實驗



3.3 多傳感器故障實驗

4 結(jié)語
猜你喜歡
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
汽車維修與保養(yǎng)(2015年12期)2015-04-18 07:51:49
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維修與保養(yǎng)(2015年2期)2015-04-17 01:30:34