船舶機電設備無線振動監測實驗研究
2018-10-17 00:55:32張陳寶崔漢國明廷鋒
中國修船 2018年5期
張陳寶,崔漢國,明廷鋒,陸 杰
(海軍工程大學 動力工程學院,湖北 武漢 430033)
機電設備是船舶最為重要的一部分,它的穩定工作為船舶安全行駛、船員正常生活工作提供重要保障,因此對船舶機電設備進行實時監測意義重大。目前,對于船舶機電設備的監測大多采用的是CAN現場總線的方式[1],然而艙室中的電機、風機、水泵和油泵等機電設備遍布各個艙室,電纜的鋪設量大、保養維護難、設備成本高、且易影響人員正常工作。而對船舶機電設備進行巡檢,不能及時發現機電設備可能存在的問題,且該監測實施方案耗時長,工作量大。針對以上現象,將無線傳感器網絡引入到機電設備的振動監測來構建無線、分布式實時振動監測系統成為一種可解決的思路。
無線傳感器網絡[2]自20世紀70年代發展以來,因其全新的信息獲取和處理方式,克服了有線監測設備的不足,布置靈活、安裝維護方便、成本較低,可以在無人監管的狀態下安全穩定工作,目前在工業生產、國防軍事、環境監測、衛生醫療和交通管理等領域都有所應用[3-5]。但是當前無線傳感器網絡自身發展還有待提高,現有的傳感器網絡節點大多是監測溫度、濕度、壓力和光強度等緩慢信號量,針對振動監測設計的節點較少,且主要是針對高樓、橋梁[6]等一些大型建筑物的低頻振動監測。市場上現有的無線振動傳感器網絡節點,專業性不強,且體積偏大,不宜用于船舶上實際布置安裝。
本文針對船舶機艙的特殊環境和設備,對現有無線傳感器網絡監測節點進行改進,設計一套高性能無線振動采集節點,目的在于解決現有無線傳感器節點存在的不足,探索將無線傳感器網絡用于船舶機電設備實時振動監測,以船舶現有機電設備振動監測系統的有線傳感器節點為比較對象,驗證無線傳感器網絡振動監測節點在船舶機電設備振動監測應用的可行性。
1 無線傳感器網絡振動監測系統
無線傳感器網絡監測模式是在嵌入式操作系統、數字電路、無線通信、傳感器、分布式信息處理等技術基礎上發展起來的一種新穎的獲取監測數據的方法,它兼具低成本、低功耗、多功能的特點,通過大量分布式的傳感器自組網和多跳方式,以無線傳輸的方式將采集信息量發送給上位機實現對感知對象的實時監測。其中無線振動監測對節點的數據高頻采集、高效處理、可靠傳輸提出了更高的要求。
1.1 系統構架
無線傳感器網絡監測系統由若干無線傳感器網絡振動監測節點、網關節點及上位機監控中心構成[7],如圖1所示。
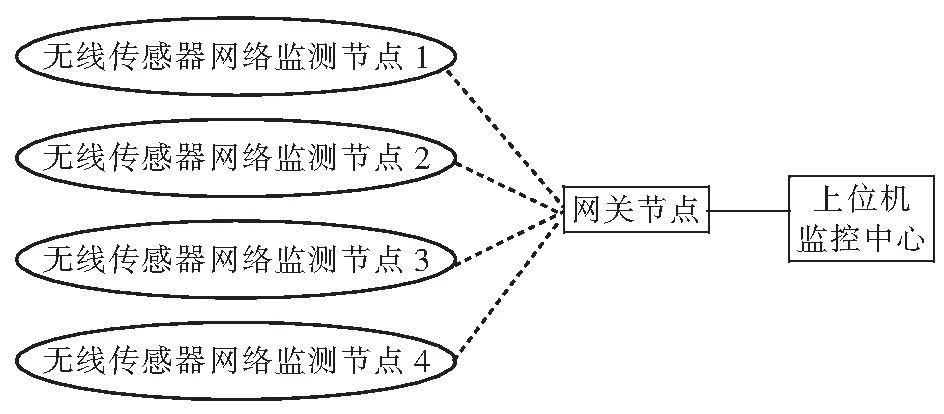
圖1 無線傳感器網絡監測系統構架
本文以4個監測節點為例,其中監測節點負責將機電設備的振動信息采集、處理,后通過無線傳輸的方式將數據包傳輸到網關節點,網關節點的主要功能是對加入該無線傳感網絡的節點發送命令、接收節點傳輸的數據包,并通過串口的方式傳輸到上位機進行數據處理、顯示以及存儲等,通過在上位機監控中心發布命令,完成無線監測系統的組網、數據的采集、傳輸及綜合分析處理,顯示機電設備振動情況,發布預警信息。
1.2 無線傳感器監測節點
傳統無線傳感器節點大多以單片機為核心硬件,資源不足;存儲空間小,采樣頻率低;功耗過大,且缺乏有效的電源管理。本文設計的無線傳感器監測節點實物如圖2所示。
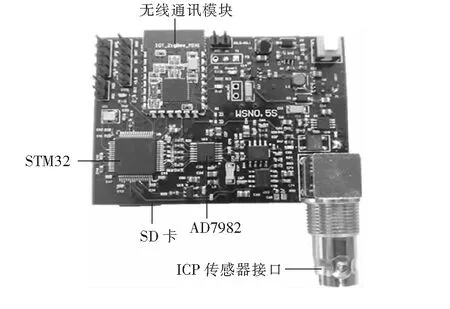
圖2 無線傳感器網絡監測節點實物
采用雙核心結構設計,由主板上基于ARM Cortex M4內核的STM32F405RGT6微控制器和無線通訊模塊中TI CC2430集成的8051微處理器組成。STM32是一款高性能、低功耗、低成本的微處理器,內部集成了高達1 MB的可編程Flash和192 KB的SRAM,足以滿足監測節點數據處理的要求,且有豐富的外部設備接口。CC2430是專門針對IEEE 802.15.4應用設計的片上系統,它采用2.4 GHz直接序列擴頻(DSSS)的調制格式,具有極高的接收靈敏度和抗干擾性能,數據傳輸速率理論最高可達250 Kbps。為了滿足機電設備的高采樣頻率,節點采用獨立的A/D轉換器AD7982,它是一款快速、低功耗、精密18位AD、逐次逼近型模數轉換器(ADC),最高采樣率可達1 000 ksps, 搭配8 G的SD存儲卡,可以將采集的數據暫時儲存,待收到傳輸命令后將數據量無線傳輸到上位機。此外,一個比較突出的優勢是節點的能量管理方面。除采用低功耗的組件,監測節點采用了2節3.7 V的可充電鋰電池串聯供電,選擇了開關穩壓電路和線性穩壓器件組合的方式為各個模塊供電,保證了節點較高的電源轉換效率且兼顧了敏感電路對電源質量的要求。監測節點設置了多個工作模式,在休眠狀態下關閉其他模塊、保持無線通訊模塊低耗連接,從而保證節點長時間穩定工作。
本文設計的無線傳感器監測節點采用模塊化設計,如圖3所示,它包括數據采集模塊、微處理器模塊、無線通訊模塊、能量供應模塊。數據采集模塊包括傳感器和A/D轉換器兩部分,主要用于感知及獲取無線傳感器網絡監測區域內的振動信息,并將其轉換成數字信號;微處理器模塊主要由微處理器和存儲器兩部分組成,其功能一方面是協調各功能模塊的有序工作,另一方面則是將采集到的無線傳感器網絡節點數字信號進行處理、存儲;無線通訊模塊包括無線收發器,主要負責與網關節點進行通信,完成無線組網,命令收發和數據傳輸;能量供應模塊則主要是為無線傳感器網絡節點各工作模塊提供工作所需要的能量。
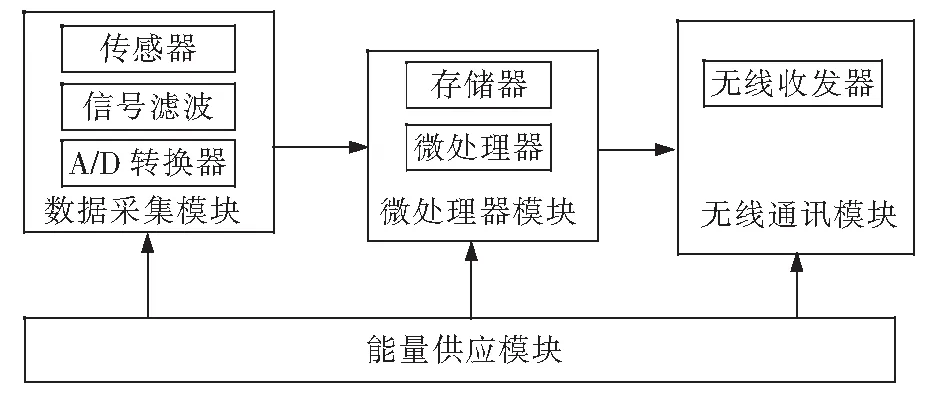
圖3 無線傳感器網絡監測節點構成
1.3 軟件設計
本文無線監測系統軟件設計的總體方案主要包括監測節點和上位機監控中心2個方面的設計。節點上主要包括數據采集程序、接口程序、節點主程序、無線通訊程序和數據存儲程序,其中使用了穩定、結構簡單的,具有嵌入式實時操作系統的μC/OS-II。采用Visual Studio開發工具設計了上位機軟件,功能包括節點拓撲管理、系統參數設定、數據實時顯示、數據頻譜分析和數據儲存等。
2 船舶機電設備振動監測實驗
本文振動監測實驗是在某型船舶動力艙室的機電設備上完成的,包括實驗測點的選取、傳感器的安裝、信號采集、數據處理方面有序開展,從系統組網、采集傳輸、可靠性方面,對無線與有線振動監測系統進行比較。
2.1 實驗搭建
實驗選取低噪聲三相異步電動機和立式往復艙底泵配套工作的組合設備為測試對象,為了有效采集振動情況,分別在軸承座和電機中線上方布置4個測點。為驗證無線傳感器網絡振動監測系統(以下簡稱無線振動系統)無線組網、抗干擾性能及數據采集準確性,分別在每個測點位置布置2個傳感器,如圖4所示,一個接入無線振動系統,一個接入有線振動系統。本文選用的有線振動監測系統設備具有8個輸入通道(本文用其中4個通道)。無線振動系統由4個無線監測節點、1個網關節點和上位機監控中心組成。

圖4 實驗測點布置圖
本文實驗采用的傳感器是EA-YD-185型ICP傳感器,內置集成電路的加速度計,靈敏度高,頻率響應帶寬可達10 kHz,足以滿足機電設備的振動數據采集,實驗中無線監測系統采樣頻率設置為10 kHz,采樣模式設置為定長采樣,有線監測系統采樣頻率設置為12.8 kHz,安裝方式均為螺栓固定。
2.2 實驗數據采集測試分析
2.2.1 無線組網測試
將艙室中機電設備打開,在艙室內部形成水回路循環,模擬在水下作業時環境。打開無線振動系統上位機軟件,發送組網連接命令,4個監測節點7、8、9、10號依次接入無線監測系統,圖5顯示4個監測節點顯示的圖標與網關節點G是實線相連,表示4個節點均連入網絡。將艙室內簡易門關閉,無線監測節點依然保持連接狀態。
2.2.2 無線傳輸可靠性測試
為了驗證無線振動系統無線傳輸可靠性,先后在艙室中進行了3次4通道無線振動測試,分別是近距離無線測試、遠距離(10 m)無線測試、遠距離有障礙物(10 m關艙門)無線測試。第2、3次測試的結果如表1所示。實驗結果可知在船舶密閉動力艙室中,在空間有限的艙室中,無論是距離遠近,還是中間有障礙物,節點采集的數據均可以完全通過無線傳輸的方式上傳到上位機進行后進行綜合分析處理。
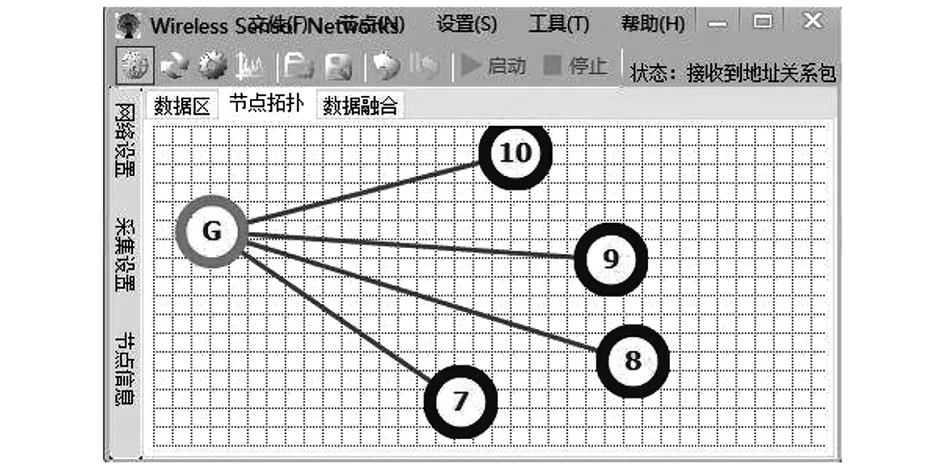
圖5 無線組網上位機連接

表1 數據無線傳輸測試結果
2.2.3 采集數據結果對比分析
選取轉速為2 947 r/min電動機上的一組測點進行分析。為了清晰的看出有線與無線監測系統采集到的波形圖時域圖變化,兩組數據均選取2.56 s的數據進行對比,如圖6所示。可以看出2組數據的振動幅值基本相同。我們對2組數據做傅里葉變換,選取10~200 Hz頻域做對比分析,如圖7所示,可以看出2組數據的頻域曲線趨勢基本一致,幅值也比較接近,均可以有效測得主要譜線頻率1倍頻48.44 Hz和2倍頻98.44 Hz。
由于對比實驗的采樣頻率不一致,在后期對實驗數據處理時,先是通過帶通濾波截取2組數據頻率在10~1 000 Hz的振動數據,計算得到無線監測系統振動有效值是2.019 1 m/s2,有線監測系統振動有效值是2.084 4 m/s2,兩者相差3.13%。該組實驗數據表明通過無線監測系統采集到的數據具有參考價值,與有線監測系統采集到的數據有一定相差原因在于傳感器安裝位置不是完全相同、有固有噪聲,無線采集節點存在晶振漂移等。
3 結束語
針對船舶艙室機電設備振動監測不易布置線纜,實時監測不方便,本文在現有無線振動監測節點的基礎上,采用雙核心設計無線傳感器網絡振動采集節點,依托Visual Studio開發的上位機軟件和串口轉USB網關節點構建了密閉艙室無線振動監測系統,經實驗驗證該系統可以有效采集船舶機電設備振動數據,為船舶機艙振動監測網絡的架構提供了一種可行的方案。
從無線網絡監測系統在船舶艙室機電設備振動試驗的組網、傳輸和對比實驗來看,無線傳感器網絡監測系統在短距離復雜情況下可以有效對采集數據進行分析。相對于有線監測系統,具有無需鋪設電纜、構架簡單、成本較低及可拓展性強的優勢,在數據采集的可靠性和準確度上與有限監測系統保持高度一致。盡管在實時性、抗干擾、采集數據量方面存在不足,但是隨著技術的發展,相信將無線傳感器網絡應用于船舶艙室機電設備振動監測會有很好的前景。
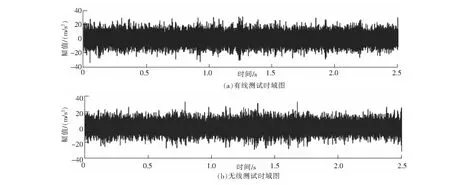
圖6 有線與無線測試原始時域對比圖

圖7 無線與有線監測10~200 Hz頻域對比圖
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年14期)2022-09-22 03:07:40
工業設計(2022年8期)2022-09-09 07:43:20
船舶(2021年4期)2021-09-07 17:32:22
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
天天愛科學(2020年6期)2020-09-10 07:22:44
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
數學物理學報(2017年6期)2018-01-22 02:26:40
家庭影院技術(2017年9期)2017-09-26 03:41:45