基于成本優(yōu)化的多跳無線充電問題研究
2018-10-18 10:33:48祝貞陽
現(xiàn)代計算機 2018年26期
祝貞陽
(杭州電子科技大學計算機學院,杭州310018)
無線傳感網(wǎng);無線充電;數(shù)據(jù)采集;錨點
0 引言
無線傳感器網(wǎng)絡(luò)目前應(yīng)用十分廣泛,例如軍事、醫(yī)療、自然環(huán)境監(jiān)測和野生動物生活習性觀察,等等。一般情況下,傳感器節(jié)點由電池供電,而電池的容量有限,隨著時間的推移,傳感器節(jié)點將耗盡自身的能量,這樣就導(dǎo)致了無線傳感器網(wǎng)絡(luò)的生命周期受限。為了保證傳感器網(wǎng)絡(luò)能夠持續(xù)運行,我們引進了無線充電技術(shù)的新概念,目前主流的無線充電技術(shù)主要分為三類:電感耦合、磁共振耦合和電磁波輻射技術(shù)。
第一類是電感耦合技術(shù)[1-2],電感耦合技術(shù)優(yōu)點在于安全并易于實現(xiàn),它通過兩個線圈間的感應(yīng)就能實現(xiàn)能量的傳遞。但電感耦合技術(shù)只能用在非常短的距離間充電,而且充電器和設(shè)備間必須緊密耦合,精確對準。
第二類是磁共振耦合技術(shù)[3-10],磁共振耦合相比電感耦合技術(shù)的初級線圈和次級線圈各多了一個電容,這樣就形成了LC諧振電路,當初級線圈和次級線圈諧振頻率相等形成共振時才會有能量的傳輸,它的缺點是不適合移動應(yīng)用、充電距離有限并難以實現(xiàn)。
第三類是電磁波輻射技術(shù)[11-17],電磁波輻射技術(shù)適合移動應(yīng)用,是一種低功率遠距離的能量傳輸模式。但當無線電頻率(RF)太高時會導(dǎo)致不安全和充電效率低。
以上三種無線充電技術(shù)都能對傳感器節(jié)點進行無線充電,從而保證傳感器的持續(xù)運行。本文通過結(jié)合磁共振耦合技術(shù)和移動數(shù)據(jù)采集模型來最小化系統(tǒng)總開銷,SenCar在給傳感器節(jié)點充電的同時還對傳感器產(chǎn)生的數(shù)據(jù)進行采集,以保證在傳感器網(wǎng)絡(luò)持續(xù)運行的前提下最小化系統(tǒng)的總開銷。本文的創(chuàng)新之處體現(xiàn)在如何挑選出最佳的“錨點”,因為“錨點”的選擇關(guān)系到充電損耗和SenCar的移動損耗。首先根據(jù)能量消耗和能量補充之間的關(guān)系確定好完成所有充電任務(wù)所需最少的SenCar數(shù)量。接下來再對所有選出的“錨點”求一條完整的TSP路徑,并規(guī)劃方案用一定數(shù)量的SenCar將路徑進行劃分,從而使得完成所有充電任務(wù)的系統(tǒng)總開銷最低。
本文提出一種新的最優(yōu)成本優(yōu)化方案,通過設(shè)計并實現(xiàn)“錨點選擇算法”,該算法首先將傳感器節(jié)點進行聚類,分別計算每個分類中各傳感器節(jié)點的平均消耗,并將平均消耗最低的節(jié)點作為“錨點”,確保選出的“錨點”能夠覆蓋到整個無線傳感器網(wǎng)絡(luò)。最后規(guī)劃方案用適當數(shù)量的SenCar使得完成所有充電任務(wù)所需的總開銷最低。
本文的主要貢獻如下:
(1)根據(jù)能量消耗和能量補充之間的關(guān)系確定好完成傳感器網(wǎng)絡(luò)中所有充電任務(wù)所需的最少SenCar數(shù)量。
(2)設(shè)計并實現(xiàn)了一種新的“錨點選擇算法”,該算法首先將傳感器節(jié)點進行聚類,針對每個充電集合,分別計算各節(jié)點的平均損耗,選擇平均消耗最低的節(jié)點作為“錨點”。同時為了減少能量的損耗,只考慮聚集一跳以內(nèi)的傳感器節(jié)點。
(3)確定好“錨點”的位置后,再對所有選出的“錨點”求一條完整的TSP路徑,在完成傳感器網(wǎng)絡(luò)中所有充電任務(wù)所需總時間一定的條件下,規(guī)劃方案通過使用適當數(shù)量的SenCar將路徑進行劃分從而使得完成所有充電任務(wù)所需的總開銷最小。
(4)通過多次模擬實驗驗證和分析了我們提出算法的性能,實驗結(jié)果表明,該算法能以一定SenCar數(shù)量的開銷下最小化系統(tǒng)總開銷。
1 相關(guān)工作
本節(jié)主要回顧了單節(jié)點無線充電和多跳無線充電技術(shù)的相關(guān)工作。
過去的研究工作大多集中在單節(jié)點無線充電,單節(jié)點無線充電只允許移動充電器一次給單個傳感器節(jié)點充電,并且移動充電器需要緊挨著傳感器進行充電,這樣不僅導(dǎo)致了低充電效率以及高延遲,而且后面待充電的節(jié)點可能因為長期等待得不到能量補充而耗盡能量甚至餓死。在文獻[18]中,作者解決了確定MC的最小數(shù)量以保持每個傳感器節(jié)點連續(xù)工作的問題。首先,作者提出一種基于旅行商問題的貪婪算法。接下來開發(fā)了一個啟發(fā)式算法以解決Tours的分配問題,并將這些Tours分配給最小數(shù)量的MC。在文獻[19]中,作者提出了一個無線能量補充和無線傳感器網(wǎng)絡(luò)中基于“錨點”的移動數(shù)據(jù)采集(WerMDG)框架,通過考慮能量消耗的各種來源和能量補充的時變特性。首先確定“錨點”選擇策略和訪問“錨點”的序列。然后,將Wer?MDG問題制定為受流量,能量平衡,鏈路和電池容量以及移動收集器的有限逗留時間限制的網(wǎng)絡(luò)效用最大化問題。在文獻[20]中,作者提出了一種稱為移動設(shè)備移動算法(MDTA)的新算法,通過使用有限數(shù)量的移動設(shè)備為傳感器充電并收集數(shù)據(jù)。仿真實驗結(jié)果表明,MDTA相比其他方法具有更好的性能。在文獻[21]中,作者探討了為無線傳感器網(wǎng)絡(luò)提供能量時的能量不足問題,并提出了一種饑餓避免的移動能量補給方案(SAMER),可通過計算并考慮每個充電要求的最大可容忍延遲來避免能量不足。仿真實驗結(jié)果表明,SAMER方案能夠有效地解決無線傳感器網(wǎng)絡(luò)中能量不足的問題,并實現(xiàn)高效的移動能量補充。在文獻[22]中,作者提出了一種智能無線充電車(IWCV)策略,以動態(tài)可擴展的方式解決無線傳感器網(wǎng)絡(luò)的能量限制問題。IWCV策略涵蓋一種智能路由策略,用于遍歷傳感器網(wǎng)絡(luò)拓撲并為電池充電以延長使用壽命。
考慮到單節(jié)點無線充電在充電模式上的缺陷,后人在此基礎(chǔ)上提出了多跳無線充電技術(shù)的新概念,它允許移動充電器同時給多個傳感器節(jié)點充電,并能夠?qū)崿F(xiàn)能量之間的互換。相比于單節(jié)點無線充電,多跳無線充電具有更高的充電效率以及擴展性。但目前針對無線可充電傳感器網(wǎng)絡(luò)中的多跳無線充電技術(shù)研究相對還比較少,主要集中在文獻[23-26]作了相關(guān)研究。在文獻[23]中,作者提出了一個采用諧振中繼器進行多跳無線充電的新框架。他們構(gòu)建了基于磁共振耦合技術(shù)下的能耗模型,并計算了多跳無線充電效率。然后,他們通過能量消耗和能量補充之間的關(guān)系近似估算出完成所有充電任務(wù)所需SenCar的數(shù)量。接下來將該問題轉(zhuǎn)化為一個雙目標優(yōu)化問題,并提出一個兩步近似算法解決這個問題以最小化系統(tǒng)總開銷。最后,他們還提出一個后期優(yōu)化算法以進一步降低系統(tǒng)總開銷。在文獻[24]中,作者在考慮節(jié)點能量需求,傳輸過程中產(chǎn)生的能量損失以及充電器容量限制的條件下,提出了一個優(yōu)化模型來確定最小充電器的數(shù)量以完成所有充電任務(wù)。在文獻[25]中,作者提出了一種高效節(jié)能的移動多跳充電策略。通過引入基于最優(yōu)中心點的輪詢點選擇算法,為移動充電器構(gòu)建了每個分區(qū)的最佳捕獲點。并且在每個分區(qū)中,采用多跳無線充電的方式為這些節(jié)點補充能量。通過聯(lián)合優(yōu)化移動路徑,中繼路由和充電時間,開發(fā)了一個充電效率函數(shù)來分析能效。在文獻[26]中,作者旨在克服無線傳感器網(wǎng)絡(luò)中的能量限制,介紹了三種多跳無線能量傳輸技術(shù),并且推導(dǎo)出它們各自的能量傳輸效率。
2 模型和假設(shè)
我們提出的模型中基站位于無線傳感器網(wǎng)絡(luò)的中心,SenCar停靠在基站的附近。傳感器節(jié)點隨機部署在無線可充電傳感器網(wǎng)絡(luò)中,SenCar給“錨點”補充能量,SenCar自身攜帶充電器和數(shù)據(jù)采集裝置,SenCar在給“錨點”充電的同時還對數(shù)據(jù)進行采集,并將采集到的數(shù)據(jù)交給基站,而“錨點”獲得能量補充后再對請求充電的傳感器節(jié)點進行充電。SenCar從基站出發(fā),按照“錨點”提前規(guī)劃好的路徑有序地對“錨點”進行充電,直到“錨點”覆蓋完整個無線傳感器網(wǎng)絡(luò)。模型中我們假設(shè)充電過程中將所有傳感器節(jié)點的電池都充滿。無線傳感器網(wǎng)絡(luò)的網(wǎng)絡(luò)模型圖如圖1所示。
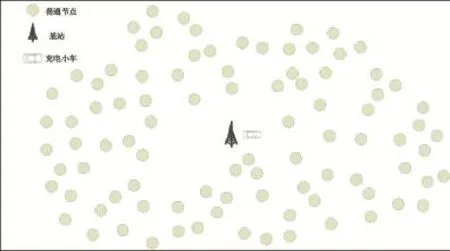
圖1 網(wǎng)絡(luò)模型圖
數(shù)據(jù)采集模型:
數(shù)據(jù)采集過程中涉及到能量消耗,本文的研究工作中只考慮移動數(shù)據(jù)采集,周圍的傳感器節(jié)點將產(chǎn)生的數(shù)據(jù)量傳送到“錨點”位置,SenCar在給“錨點”充電的同時還對各傳感器產(chǎn)生的數(shù)據(jù)進行移動采集。傳感器傳送/接收1比特數(shù)據(jù)的能量消耗為:
其中,e0表示傳感器用于感知、編碼和調(diào)制的能耗,e1表示每比特數(shù)據(jù)的損失系數(shù),dr表示傳輸距離,α表示路徑損耗系數(shù)(通常取2到4),λ表示傳感器節(jié)點單位時間產(chǎn)生的數(shù)據(jù)量。移動數(shù)據(jù)采集局部模型如圖2所示。
能量傳遞模型:
本文考慮磁共振耦合技術(shù)下的能量傳遞模型,能量傳遞的過程中涉及到能量損耗。計算多跳無線充電效率是本文的關(guān)鍵,文獻[1]中采用磁共振耦合模型下的無線充電技術(shù)計算多跳無線充電效率η見表1所示。
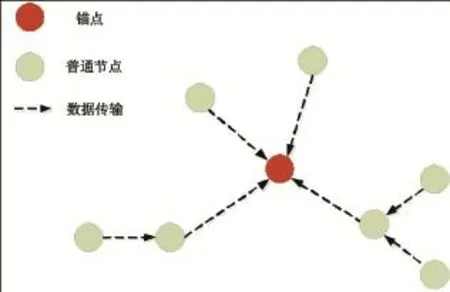
圖2 移動數(shù)據(jù)采集模型
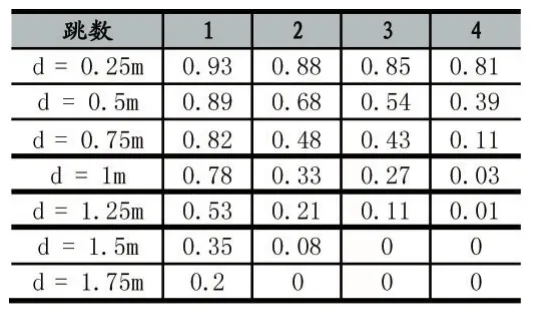
表1 多跳無線充電效率
由表1可見,隨著跳數(shù)的增加,無線充電效率逐漸降低,同時隨著傳感器節(jié)點之間距離的增加,無線充電效率也逐漸降低,但隨著距離的增加,無線充電效率衰減的比較厲害。因此,多跳無線充電效率與跳數(shù)和傳感器節(jié)點之間的距離相關(guān),而且后續(xù)的模擬實驗需要用到相關(guān)參數(shù)。
假定節(jié)點j請求dj的能量,那么節(jié)點i需要為節(jié)點j提供dj/ηij的能量,對于節(jié)點i和節(jié)點k的無線充電效率ηik=ηijηjk。能量傳遞的局部模型如圖3所示。
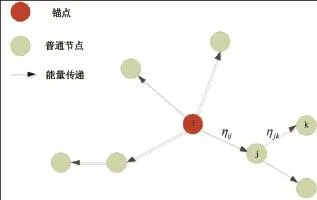
圖3 能量傳遞模型
3 問題的形式化定義
問題描述:
在一個隨機部署了N個傳感器節(jié)點的無線傳感器網(wǎng)絡(luò)中(N盡量超過一個SenCar的服務(wù)能力),每個傳感器節(jié)點單位時間內(nèi)的數(shù)據(jù)產(chǎn)生率是確定的。給定完成整個無線傳感器網(wǎng)絡(luò)中所有充電任務(wù)(將全部傳感器節(jié)點充滿電)的總時間T,T要求小于給定的閾值Y。結(jié)合考慮SenCar的使用成本,如何規(guī)劃方案在使用適當數(shù)量SenCar的條件下使得完成這些充電任務(wù)所需的系統(tǒng)總開銷最小,且保證每個傳感器節(jié)點都不會餓死。

表2 符號描述
根據(jù)上述符號定義,我們可以將該問題轉(zhuǎn)化成如下的優(yōu)化問題。
對于給定完成整個無線傳感器網(wǎng)絡(luò)中所有充電任務(wù)所需的總時間T(不考慮移動數(shù)據(jù)采集的時間),默認將所有傳感器節(jié)點的電池充滿。
目標函數(shù):

其中:
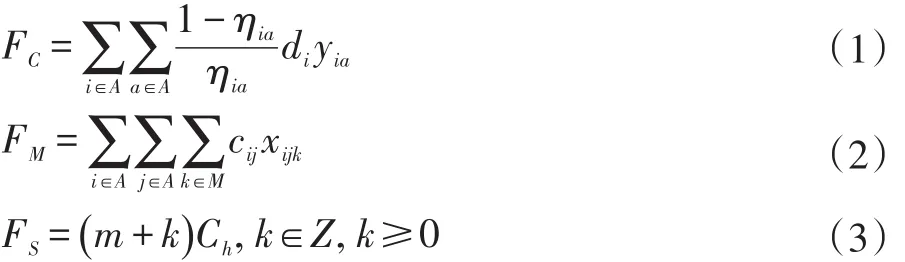
式(1)代表多跳能量傳遞過程中的充電成本;式(2)代表SenCar的移動成本;式(3)代表SenCar的使用成本。
約束條件:

上述約束條件中,(4)、(5)規(guī)定了 SenCar移動路徑的連通;(6)規(guī)定了所有傳感器節(jié)點都被唯一的“錨點”充電;(7)確保節(jié)點的充電效率大于效率閾值;(8)確保節(jié)點歸屬于某一錨點;(9)表示SenCar用于充電的總能量;(10)表示SenCar k的移動和充電所需的總時間;(11)表示完成整個無線傳感器網(wǎng)絡(luò)中所有充電任務(wù)所需的總時間;(12)表示完成整個無線傳感器網(wǎng)絡(luò)中所有充電任務(wù)所需的總時間小于閾值Y;(13)表示SenCar需要為傳感器提供的總能量加上SenCar的移動損耗之和不能超過SenCar的充電容量;(14)表示xijk,yia,zik取值為0或1。
4 理論分析
本節(jié)主要理論分析了SenCar在移動數(shù)據(jù)采集過程中的能量消耗以及在能量傳遞過程中的能量補充,并根據(jù)能量消耗和能量補充之間的關(guān)系確定完成無線傳感器網(wǎng)絡(luò)中所有充電任務(wù)所需的最少SenCar數(shù)量。
(1)能量消耗
根據(jù)目前數(shù)據(jù)采集的研究現(xiàn)狀,本文只考慮Sen?Car的移動數(shù)據(jù)采集。首先,我們分析SenCar在移動數(shù)據(jù)采集過程中產(chǎn)生的能量消耗,由于SenCar的移動軌跡具有不確定性,因此很難分析出這個過程中的能耗,根據(jù)文獻,我們可以近似得到m個SenCar在移動數(shù)據(jù)采集過程中的能量消耗,記為Es。

其中,l代表跳數(shù),λ代表傳感器節(jié)點單位時間內(nèi)的數(shù)據(jù)產(chǎn)生率,N代表傳感器節(jié)點數(shù)量,ec代表傳送或接收一個數(shù)據(jù)包的能量消耗。
(2)能量補充
確定好m個SenCar在移動數(shù)據(jù)采集過程中產(chǎn)生的能耗后,接下來需要估算出為無線傳感器網(wǎng)絡(luò)補充的能量,以達到能量消耗與能量補充之間的平衡。我們假設(shè)m個SenCar的總充電率為Re。

根據(jù)式(16)可以看出,多跳無線充電相比于單節(jié)點無線充電具有更好的擴展性。其中,Cb代表傳感器節(jié)點的電池容量,β代表電池容量的閾值,rmax代表最大充電范圍,ρ代表傳感器節(jié)點的分布密度,SenCar的最長移動時間Tl=2Rc/v(Rc代表感應(yīng)場的半徑,v代表SenCar的移動速度),Tr代表將傳感器電池從0到充滿所需的時間。
(3)確定最少SenCar數(shù)量
理論分析好SenCar在移動數(shù)據(jù)采集過程中的能量消耗和能量補充后,再根據(jù)兩者之間的能量平衡關(guān)系,得出需要為無線傳感器網(wǎng)絡(luò)補充的能量至少要等于SenCar在移動數(shù)據(jù)采集過程中消耗的能量。因此,我們讓E≤R,結(jié)合式(15)和式(16)可以得到:

根據(jù)式(17)可以看出,針對固定大小的感應(yīng)場半徑,SenCar的使用數(shù)量與傳感器節(jié)點的數(shù)量無關(guān),因此這個特性允許在未發(fā)生額外的開銷下提高無線傳感器網(wǎng)絡(luò)的擴展性。
5 方案規(guī)劃
本節(jié)我們設(shè)計了一套無線可充電傳感器網(wǎng)絡(luò)中多跳無線充電結(jié)合移動數(shù)據(jù)采集模型的成本優(yōu)化方案。首先,我們提出“錨點”選擇算法并確定好“錨點”的位置,然后對所有選出的“錨點”求一條完整的TSP路徑,接下來再將TSP路徑進行劃分,并將其分配給相應(yīng)數(shù)量的SenCar。
(1)“錨點”選擇算法
我們首先介紹提出的“錨點”選擇算法,該算法基于能量請求來獲取“錨點”集合,本章節(jié)中“錨點”的選擇至關(guān)重要,因為“錨點”的選擇關(guān)系到充電損耗和SenCar的移動損耗,這樣會間接影響到系統(tǒng)的總開銷。“錨點”選擇方案的示意圖如圖4所示。
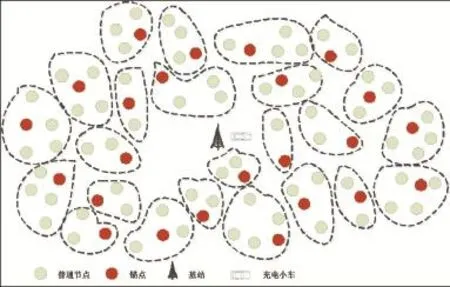
圖4 “錨點”選擇算法
算法1“錨點”選擇算法
Input:Recharging node setN,charging setSi,ener?gy demanddi,charging efficiency of nodej.
Output:Set of anchorsAand resultant subsetsB.
1.whileB≠Ndo
4.A←A∪k,B←B∪Sk,Si←Si-B,?ik∈N.
5.end while
(2)成本優(yōu)化策略
①確定TSP路徑
如圖4所示,在一個隨機部署了N個傳感器節(jié)點的無線傳感器網(wǎng)絡(luò)中,基站位于無線傳感器網(wǎng)絡(luò)的中心,SenCar停靠在基站的附近。為了選出合適的“錨點”,我們首先定義集合A和B用來記錄“錨點”和“錨點”所覆蓋的傳感器集合,然后將傳感器節(jié)點進行聚類,得到充電集合Si,針對每個充電集合,分別計算各傳感器節(jié)點的平均損耗,并選擇平均損耗最低的節(jié)點作為“錨點”。如果B包含在充電節(jié)點集合N中的所有傳感器節(jié)點,那么算法將終止。否則,繼續(xù)在剩余平均損耗最低的節(jié)點中找到下一個集合,直到覆蓋完所有的傳感器節(jié)點。“錨點”選擇算法的偽代碼如下所示。
選擇并確定好“錨點”的位置后,接下來再通過旅行商算法對所有選出的“錨點”求一條完整的TSP路徑,SenCar從基站出發(fā),沿著TSP路徑的位置有序地對“錨點”進行充電,直到挑選出的“錨點”覆蓋到整個無線傳感器網(wǎng)絡(luò)。假設(shè)有網(wǎng)絡(luò)模型如圖5所示。
如圖5所示,基站位于無線傳感器網(wǎng)絡(luò)的中心,SenCar停靠在基站的附近,綠色的節(jié)點代表普通傳感器節(jié)點,紅色的節(jié)點代表“錨點”。SenCar從基站出發(fā),經(jīng)過每個“錨點”的位置,圖5中“錨點”的TSP路徑就是對所有“錨點”求得完整的一條哈密頓回路。
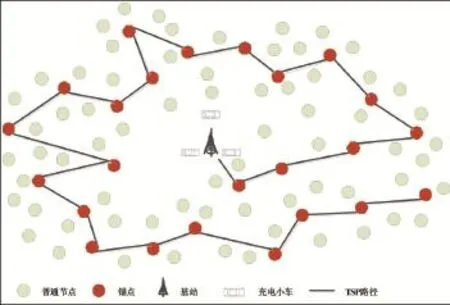
圖5 “錨點”的TSP路徑
確定好“錨點”的TSP路徑后,考慮到當無線可充電傳感器網(wǎng)絡(luò)的覆蓋區(qū)域足夠大時,而SenCar的電池容量有限,那么一個SenCar無法滿足所有傳感器節(jié)點的充電請求,因此,此時需要對整個Tours進行劃分,這個過程中我們結(jié)合考慮SenCar的電池容量,SenCar的移動成本以及多跳充電成本,從而將充電路線進行劃分以分配給m個SenCar。假設(shè)SenCar的充電路線被分割為k個tours路徑,其中k取決于SenCar的充電容量。我們假設(shè)讓cmax代表從任何節(jié)點到基站路徑上的最大能量開銷,cr代表使用一個SenCar在一個完整路徑r上產(chǎn)生的能量成本。
如圖6所示,確定好“錨點”的TSP路徑后,接下來對“錨點”的TSP路徑進行劃分,根據(jù)SenCar的服務(wù)能力,將分割好的TSP路徑分配給一定數(shù)量的SenCar。每個SenCar都沿著對應(yīng)TSP路徑的位置有序地對“錨點”進行充電。路徑劃分算法的偽代碼如下所示。
算法2路徑劃分算法
Input:Set of anchorsA,SenCarsM,energy de?manddiof nodei,charging efficiency of nodej,ηj,iwhen SenCar is ati.Set of SenCars’initial locationsI,capacityCh,base station b,max energy cost traveling on an edgecmax.
Output:Recharge sequencerjfor SenCar j’s tour.
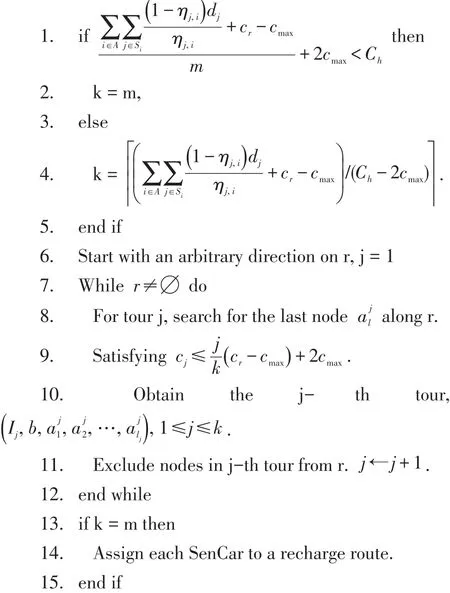
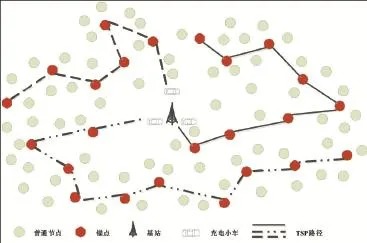
圖6 劃分TSP路徑
接下來我們需要對系統(tǒng)的總開銷進行優(yōu)化。首先,我們使用加權(quán)平均法將多跳能量傳遞過程中的充電成本和SenCar的移動成本以及SenCar的使用成本構(gòu)建成一個單目標優(yōu)化問題,F(xiàn)=w1(FC+FM)+w2FS,如果w2>w1,那么我們認為更關(guān)心SenCar的使用成本,如果w1>w2,那么我們認為更關(guān)心充電成本和Sen?Car的移動成本。如果增加SenCar的使用數(shù)量后,那么SenCar的使用成本將增加,若此時充電成本和Sen?Car移動成本減少的量大于增加SenCar數(shù)量的使用成本,那么我們將多使用SenCar數(shù)量以降低系統(tǒng)總開銷。否則,不考慮增加SenCar的數(shù)量來優(yōu)化系統(tǒng)總成本。我們讓?fm代表增加SenCar數(shù)量后SenCar移動成本的變化,?fc代表增加SenCar數(shù)量后多跳能量傳遞過程中充電成本的變化,?fs代表增加SenCar數(shù)量后Sen?Car使用成本的變化,然后讓 ΔF=w1(?fm+?fc)+w2?fs,如果ΔF<0,那么此時系統(tǒng)的總開銷降低了。該成本優(yōu)化算法的偽代碼如下所示。
算法3成本優(yōu)化算法
Input:Recharge sequencea1,a2,…als,set of an?chorsAs,energy demanddiof node i,charging efficien?cy of j,ηj,iif SenCar is at i,moving costci,jon edge(i,j),time feasibility mark at anchorx←0,objective weightsw1,w2,charging setSafor all anchors.
Output:Total system cost F and the number of in?creased SenCar k.
3.if increase k SenCars then
7.ifΔF<0then
8.The total system cost is reduced.
9.Find minimum total system costFand the number of increased SenCar k.
10.end if
11.end if
12.end while
6 實驗?zāi)M和分析
本節(jié)在Eclipse平臺上分別對上述提出的算法進行模擬實驗。本節(jié)主要模擬了不同感應(yīng)場半徑和最大充電范圍對SenCar數(shù)量的影響,不同SenCar數(shù)量對SenCar移動成本的影響以及不同SenCar數(shù)量對系統(tǒng)總開銷的影響。
(1)實驗參數(shù)設(shè)置
實驗假定傳感器節(jié)點隨機拋灑在無線傳感器網(wǎng)絡(luò)中,我們假設(shè)傳感器節(jié)點的數(shù)量為N=50,SenCar的數(shù)量從2個增加到8個。相關(guān)參數(shù)設(shè)置如表3所示。
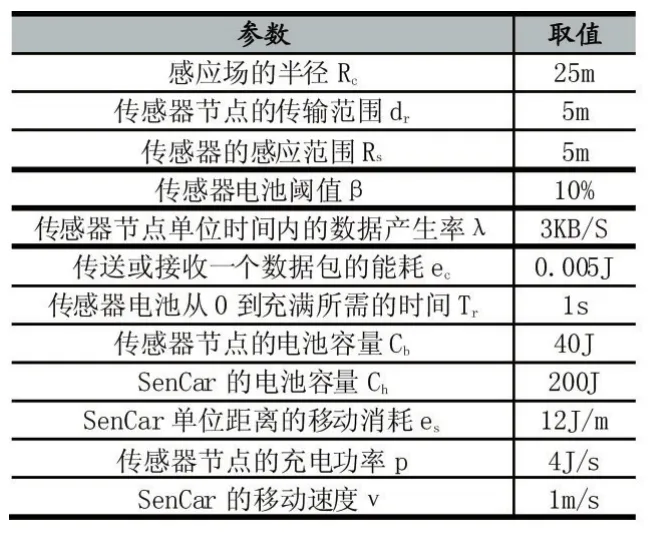
表3 實驗參數(shù)設(shè)置
實驗參數(shù)設(shè)置好后,根據(jù)表3和模擬結(jié)果,可以估計出效率超過30%的有效充電范圍為rmax=3m。此時將所有參數(shù)代入式(17)中,得到m≥1.48,也就是說使用2個SenCar基本上就能滿足所有傳感器的能量需求。
(2)不同感應(yīng)場半徑和最大充電范圍對SenCar數(shù)量的影響
我們首先研究了不同感應(yīng)場半徑和最大充電范圍對SenCar數(shù)量的影響,通過理論分析結(jié)果可以得到不同感應(yīng)場半徑和最大充電范圍下所需最少的SenCar數(shù)量,假設(shè)感應(yīng)場半徑從25m增加到50m,最大充電范圍從2m增加到4m。理論分析結(jié)果如圖7所示。
圖7描述了不同感應(yīng)場半徑以及最大充電范圍下所需的最少SenCar數(shù)量,如圖7(a)所示,隨著感應(yīng)場半徑的增加,所需的最少SenCar數(shù)量均逐漸增加,但最大充電范圍為2m相比3m變化更明顯。而如圖7(b)所示,隨著最大充電范圍的增加,所需的最少Sen?Car數(shù)量均逐漸減少,但感應(yīng)場半徑為30m相比25m下降的更明顯。由此可見,完成無線傳感器網(wǎng)絡(luò)中所有充電任務(wù)所需最少的SenCar數(shù)量與感應(yīng)場半徑以及最大充電范圍有關(guān)。
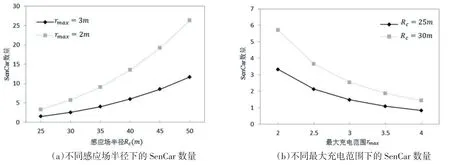
圖7

圖8 不同SenCar數(shù)量下SenCar移動成本的變化
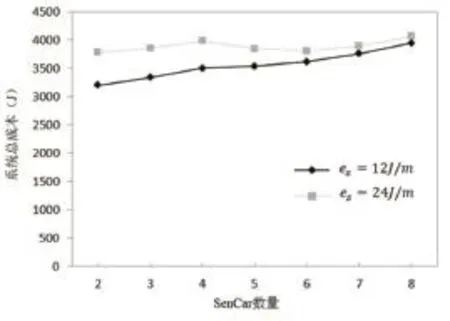
圖9 不同SenCar數(shù)量下系統(tǒng)總成本的變化
(3)不同SenCar數(shù)量下SenCar移動成本的變化
接下來我們著重研究不同SenCar數(shù)量對SenCar移動成本的影響,通過模擬實驗得到不同SenCar數(shù)量在SenCar單位距離移動消耗已知條件下SenCar移動成本的變化情況,假設(shè)SenCar數(shù)量從2個增加到8個,SenCar單位距離的移動消耗取值為12J/m和24J/m。模擬實驗結(jié)果如圖8所示。
圖8描述了不同SenCar數(shù)量下SenCar移動成本隨SenCar單位距離移動消耗取值不同的變化情況,由圖可見,隨著SenCar使用數(shù)量的增加,SenCar的移動成本均逐漸下降,因為隨著SenCar數(shù)量的增加,SenCar的移動路徑變短,因而移動成本也隨之降低了。
(4)不同SenCar數(shù)量下系統(tǒng)總成本的變化
最后,我們還研究了不同SenCar數(shù)量對系統(tǒng)總成本的影響,通過模擬實驗得到不同SenCar數(shù)量在Sen?Car單位距離移動消耗已知的條件下系統(tǒng)總成本的變化情況,假設(shè)SenCar數(shù)量從2個增加到8個,SenCar單位距離的移動損耗取值為12J/m和24J/m。模擬實驗結(jié)果如圖9所示。
圖9描述了不同SenCar數(shù)量下系統(tǒng)總成本隨SenCar單位距離移動消耗取值不同的變化情況,由圖可見,當SenCar單位距離移動消耗為12J/m時,隨著SenCar數(shù)量的增加,系統(tǒng)總成本也逐漸升高。當Sen?Car單位距離移動消耗為24J/m時,隨著SenCar數(shù)量的增加,系統(tǒng)總成本呈一定波動趨勢。由圖可見,當SenCar數(shù)量為2時,系統(tǒng)的總成本最小。
7 結(jié)語
本文通過結(jié)合無線可充電傳感器網(wǎng)絡(luò)中的多跳無線充電技術(shù)和移動數(shù)據(jù)采集模型,提出一個新的最優(yōu)成本優(yōu)化方案。首先,根據(jù)能量消耗和能量補充之間的關(guān)系可以近似得到完成所有充電任務(wù)所需最少的SenCar數(shù)量。接下來將傳感器節(jié)點進行聚類,針對每個充電集合,分別求出各節(jié)點的平均損耗,優(yōu)先選擇平均損耗最低的節(jié)點作為“錨點”,且SenCar在給“錨點”充電的同時還對各傳感器節(jié)點產(chǎn)生的數(shù)據(jù)進行移動采集。然后對所有選出的“錨點”求一條完整的TSP路徑,再根據(jù)SenCar的電池容量,SenCar的移動成本和多跳能量傳遞過程中的充電成本將充電路線進行劃分并分配給一定數(shù)量的SenCar,保證每條路徑都在一個SenCar的服務(wù)范圍內(nèi),從而得到完成所有充電任務(wù)所需的總成本。最后,我們對提出的算法進行模擬實驗,實驗結(jié)果表明,該策略在滿足一定時間約束下,使用適當數(shù)量的SenCar可以使得完成所有充電任務(wù)的總開銷最低。