無人機(jī)與視覺模塊聯(lián)動(dòng)硬件選擇和調(diào)試
2018-10-19 09:29:42李凱周喬李明豪
數(shù)碼世界 2018年9期
關(guān)鍵詞:單片機(jī)
李凱 周喬 李明豪
1 前言
四旋翼飛行器,是一種由四個(gè)螺旋槳十字形交叉構(gòu)成的飛行器。4個(gè)螺旋槳產(chǎn)生的推力相同時(shí),兩組正反槳對(duì)機(jī)身所施加的反扭矩兩兩抵消,使得繞垂直方向旋轉(zhuǎn)的反扭矩平衡,從而確保了航向的穩(wěn)定。本文所介紹的四旋翼飛行器是一種具有自主起降功能,飛行高度較低,同時(shí)可以根據(jù)信標(biāo)自主規(guī)劃航線的小軸距四旋翼飛行器。該飛行器上搭載RX23t單片機(jī)作為控制導(dǎo)航核心,獲取高度,信標(biāo)位置信息后,向飛行控制器發(fā)送飛行指令。飛行控制器根據(jù)實(shí)時(shí)飛行姿態(tài)的處理,結(jié)合接收到的飛行控制指令,向四個(gè)電子調(diào)速器發(fā)出四路PWM波信號(hào),從而驅(qū)動(dòng)對(duì)應(yīng)的無刷直流電機(jī),調(diào)整飛行姿態(tài)。經(jīng)過不斷測(cè)試,對(duì)飛行時(shí)各項(xiàng)參數(shù)的分析,設(shè)計(jì)控制算法,最終實(shí)現(xiàn)具有一鍵式起飛,定點(diǎn)定高懸停等功能。
2 硬件系統(tǒng)設(shè)計(jì)
該四旋翼自主飛行器由導(dǎo)航控制器、飛行控制器、距離傳感器、攝像功能模塊、電機(jī)驅(qū)動(dòng)模塊等部分組成,以下為各模塊的選擇和論證。

圖1.四旋翼飛行器系統(tǒng)框圖
2.1 導(dǎo)航控制器模塊的論證與選擇:
方案一:采用51系列單片機(jī),51單片機(jī)作為8位處理器,其功能完備,開發(fā)簡(jiǎn)單,價(jià)格低廉,通用性好。但其主頻有限,運(yùn)行速度慢,片內(nèi)外設(shè)少,芯片本身的保護(hù)能力差,不適用于高速實(shí)時(shí)應(yīng)用。
方案二:采用瑞薩RX23T系列單片機(jī),其最大頻率可達(dá)到40Mhz,其支持單精度流動(dòng)小數(shù)點(diǎn)演算器(FPU)、乘除計(jì)算器、乘積加法演算器(MAC命令)。通信功能方面其支持硬件I2C、SPI、UART等多種通訊方式。其豐富的定時(shí)器、外設(shè)及完善的安全性能非常適用于無人機(jī)的飛行控制使用。
對(duì)于小型四軸飛行器來講,其穩(wěn)定性差,對(duì)重量敏感,要求其導(dǎo)航板控制頻率高,輸入輸出功能強(qiáng)大,外設(shè)I/O多,工作穩(wěn)定,因此選擇方案二。
2.2 傳感器模塊的論證與選擇:
2.2.1 測(cè)距傳感器的論證與選擇:
方案一:超聲波傳感器一般作用距離在0.1-5米。通過反射回來的聲波根據(jù)聲速計(jì)算出距離。因?yàn)槁暡ǖ奶匦裕猿暡▊鞲衅魇墉h(huán)境影響比較小,使用場(chǎng)合比較廣泛。
方案二:采用反射式紅外線測(cè)距傳感器,其測(cè)距基本原理為發(fā)光管發(fā)出紅外光,光敏接收管接收前方物體反射光,接收管接收的反射光強(qiáng)隨反射物體的距離而變化的。其優(yōu)點(diǎn)是簡(jiǎn)單便宜,但測(cè)量距離近,方向性差。
綜合以上兩種方案,考慮到實(shí)際飛行高度,最終選擇方案一。
2.2.2 循跡傳感器的論證與選擇:
方案一:采用光流傳感器,利用圖像序列中像素在時(shí)間域上的變化以及相鄰幀之間的相關(guān)性來找到上一幀跟當(dāng)前幀之間存在的對(duì)應(yīng)關(guān)系,從而計(jì)算出相鄰幀之間物體的運(yùn)動(dòng)信息的.但其需要獲取的圖像具有較多的特征點(diǎn),受光照環(huán)境影響也較大。
方案二:采用CMOS圖像傳感器,CMOS圖像傳感器上集成AD轉(zhuǎn)換器、自動(dòng)曝光量控制、非均勻補(bǔ)償、白平衡處理、黑電平控制、伽瑪校正等,從而可以進(jìn)行快速計(jì)算和圖像信息采集。
綜合以上兩種方案,飛行區(qū)域除黑色圓塊和最終選擇保真度高,抗噪聲干擾能力大的CMOS成像的OV7725攝像頭作為圖像傳感器。在模塊型號(hào)方面選擇了OpenMV3 Cam,它是一個(gè)開源,成本較低的攝像功能模塊。
2.3 電機(jī)驅(qū)動(dòng)模塊
方案一:采用有刷空心杯電機(jī),有刷電機(jī)常見于大多數(shù)小型飛行器,由于其電刷和換向器之間有摩擦,存在效率降低、噪音增加、容易發(fā)熱,效率低、輸出功率小等缺點(diǎn),優(yōu)點(diǎn)是成本低。
方案二:采用無刷電機(jī),無刷直流電機(jī)利用電子元器件的開關(guān)特性取代了機(jī)械碳刷使換向變得無機(jī)械接觸,所以其具有低能耗、低噪音、超長(zhǎng)壽命、高可靠性的特點(diǎn)。
綜合以上兩種方案,為了保證飛行器的動(dòng)力和穩(wěn)定性,我們選用無刷電機(jī)。
2.4 飛行姿態(tài)獲取模塊的選擇:
MPU6500多軸傳感器,它整合了三軸陀螺儀、三軸加速度計(jì),用了三個(gè)16位的ADC可將其測(cè)量到的模擬量的加速度和角速度轉(zhuǎn)化為可輸出的數(shù)字量加速度和角速度,同時(shí)具有SPI通信總線類型。在滿足精度要求的條件下,從成本和抗干擾能力等方面分析,非常適用于飛行器的飛行姿態(tài)的獲取和處理。
3 系統(tǒng)軟件設(shè)計(jì)與分析:
3.1 飛行姿態(tài)的算法分析:
3.1.1 飛行姿態(tài)處理:
串級(jí)PID分為內(nèi)環(huán)和外環(huán)PID。而我們的程序設(shè)計(jì)中采用了4個(gè)雙閉環(huán)來調(diào)節(jié),其中包括了PITCH,YAW,ROLL的角速度和角加速度組成的雙閉環(huán)和高度及Z軸加速度組成的雙閉環(huán),如圖3.1和圖3.2所示。其中Z軸的加速度傳感器由超聲波傳感器得到的長(zhǎng)度求微分得到,油門的擬合則直接采用線性擬合。

圖3.1 高度環(huán)串級(jí)PID控制結(jié)構(gòu)圖
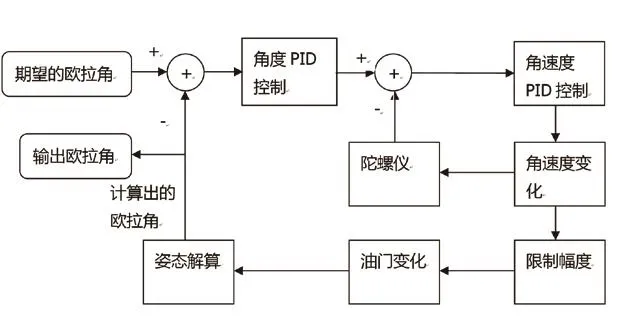
圖3.2 角度環(huán)串級(jí)PID控制結(jié)構(gòu)圖
3.1.3 飛行運(yùn)動(dòng)軌跡控制
首先基于串級(jí)PID控制系統(tǒng),我們將改變的設(shè)定值的數(shù)值,并將其放在歐拉角的外環(huán)。這種控制擁有諸多優(yōu)點(diǎn),例如抗干擾等。所以我們?cè)诔绦蛑刑砑恿硕ㄏ蜻\(yùn)動(dòng)函數(shù),計(jì)算出“目標(biāo)設(shè)定值”,根據(jù)這個(gè)值來影響PITCH,ROLL的串級(jí)PID外環(huán),并做了關(guān)于位移控制的幾種猜想。
猜想一
由一個(gè)簡(jiǎn)單的三角函數(shù)組成沖擊脈沖對(duì)無人機(jī)的穩(wěn)態(tài)進(jìn)行破壞,然后迅速回0,然后通過單級(jí)PID控制輸出,觀察無人機(jī)的狀態(tài),并且記錄沖擊所造成的無人機(jī)姿態(tài)變化和位移記錄。

圖4.1 三角函數(shù)沖擊脈沖
猜想二:
有一個(gè)階躍函數(shù)對(duì)無人機(jī)的PITCH,ROLL的串級(jí)PID外環(huán)直接造成一個(gè)沖擊,并通過單片機(jī)中的定時(shí)器對(duì)階躍函數(shù)的值進(jìn)行有規(guī)律的改變。觀察無人機(jī)的狀態(tài),并且記錄沖擊所造成的無人機(jī)姿態(tài)變化和位移記錄

猜想三:
利用無人機(jī)的視覺模塊傳回來的偏差值,將所要經(jīng)過的路線采用解算時(shí)一次,加速,減速,平衡的過程,不斷向終點(diǎn)靠近。
結(jié)論:
經(jīng)過大量的實(shí)驗(yàn),猜想三和小車循跡的算法接近,但是在無人機(jī)飛行控制的效果多不理想,由于阻力較小,無人機(jī)并不能很好的完成定點(diǎn)減速的功能。猜想一最為平滑的接近,與期望控制的理想效果最為接近,由于無人機(jī)本身有一定的偏移量,而沖擊量最終擬合到飛行狀態(tài)時(shí),具有很大的偶然性,實(shí)現(xiàn)效果差。
3.2 圖像的獲取與處理:
飛行導(dǎo)航系統(tǒng)主要圍繞黑色圓塊及小車信標(biāo)控制飛行器,飛行器需要在黑色圓塊和小車上方懸停。我們將OPENMV攝像模塊安裝至飛機(jī)底部,采集地面圖像信息后通過串口發(fā)送給瑞薩RX23T導(dǎo)航板,導(dǎo)航板收到信息后,判斷飛機(jī)此時(shí)與信標(biāo)的相對(duì)坐標(biāo),然后發(fā)出飛行運(yùn)動(dòng)指令給飛行控制芯片。
4 系統(tǒng)測(cè)試方案與結(jié)果
4.1 硬件系統(tǒng)測(cè)試方案:
1)利用數(shù)字萬用表檢測(cè)電路的連接情況,排除由于虛焊引起的斷路、短路或器件損壞等電路故障。
2)飛行器開機(jī)后根據(jù)指示燈狀況,判斷飛行實(shí)時(shí)數(shù)據(jù)的正確性。
3)通過數(shù)字邏輯分析儀觀察飛控輸出的PWM波形,確保電調(diào)工作正常。
4)攝像頭與超聲波等模塊使用其他的可靠單片機(jī)系統(tǒng)板,飛行前確保工作正常。
4.2 飛行器的功能性測(cè)試與分析:
由于無人機(jī)計(jì)算出來的歐拉角與真實(shí)歐拉角之間存在一定的偏差,所以無人機(jī)飛至水平時(shí),記錄真實(shí)的水平歐拉角,多次記錄,飛行結(jié)束后更新。多次試驗(yàn)后得到較穩(wěn)定的補(bǔ)償值。在實(shí)現(xiàn)位移過程中,通過調(diào)用沖擊函數(shù)調(diào)節(jié)角度的外環(huán),經(jīng)過多次測(cè)試,最終選定多個(gè)階躍函數(shù),實(shí)現(xiàn)了脫離,捕獲信標(biāo)等功能。
通過配合瑞薩RX23T單片機(jī),本飛行器可以實(shí)現(xiàn)一鍵起飛,定點(diǎn)定高懸停,捕獲信標(biāo),跟蹤飛行等功能。
5 總結(jié)
該四旋翼自主飛行器從起初設(shè)計(jì)方案,再到實(shí)施過程,無論是硬件電路的設(shè)計(jì)還是軟件仿真的測(cè)試,我們一直秉承著嚴(yán)謹(jǐn)?shù)目蒲袘B(tài)度,由于四旋翼飛行器自身是一個(gè)非穩(wěn)定性系統(tǒng),堅(jiān)持穩(wěn)定性與精確性并重是我們一直以來堅(jiān)持的原則,在該原則基礎(chǔ)上,我們不斷優(yōu)化算法,反復(fù)嘗試,多次試驗(yàn)分析數(shù)據(jù),逐漸實(shí)現(xiàn)黑點(diǎn)懸停,顏色識(shí)別,信標(biāo)捕捉等功能。
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設(shè)計(jì)工程(2015年15期)2015-02-27 12:07:30
電子設(shè)計(jì)工程(2015年8期)2015-02-27 12:05:36
