基于無人機的大比例尺帶狀地形圖快速建模技術研究
2018-10-20 02:53:06杜陽陽段曉峰陳錦生
鐵道標準設計 2018年11期
關鍵詞:測量
杜陽陽,段曉峰,韓 峰,陳錦生
(1.蘭州交通大學土木工程學院,蘭州 730070;2.蘭州交通大學測繪與地理信息學院,蘭州 730070)
鐵路災害出現概率雖小,但一旦發生造成的社會影響極大,故而應充分做好各項鐵路災害應急預案。從線路工程角度,科學有效的預案制定首先取決于現場地形地貌資料的實時準確掌握,因而快速獲取大比例尺帶狀圖成為亟待解決的問題。
鐵路應急測繪的具體任務是為鐵路系統突發的自然災害、事故災難等突發公共事件高效有序地提供地圖、基礎地理信息數據、公共地理信息服務平臺等測繪成果。傳統的鐵路應急勘測手段包括工程測量、遙感、物探、原位測試等。其中,遙感適用于大面域測繪,應急機動性不足;其他手段的作業條件危險,可達性低,信息傳遞不穩定。無人機航測技術具有成本低,數據處理快,影像分辨率高,現勢性強等優點。在2016年麗水山體滑坡災害中,通過開展應急預案設置、航攝作業及數據處理3個方面的技術研究,將無人機航測技術應用于應急測繪,并論證了其及時性、有效性和安全性。
本文基于無人機的數據特點,將無人機引入鐵路災害應急勘測,核心解決大比例尺帶狀地形數據獲取及快速建模問題。
1 無人機大比例尺帶狀圖施測方法研究
1.1 實驗區概況
為保證實驗數據客觀有效,減少不必要的無人機視覺誤差、儀器誤差、環境誤差、氣候誤差及精度損失,選取蘭州市某新建公路作為研究對象,實驗區平面如圖1所示,該區域全長1 km,有效測量寬度38 m,海拔高度約為1 510 m,地勢較為平坦,坡度變化小,地面遮蔽物少,利于無人機成像。

圖1 實驗區詳圖(單位:m)
1.2 無人機航攝系統構成
航測無人機的核心指標:續航時間、起降方式、飛行高度、飛行速度、抗風雨能力、遙測距離、載重能力、云臺型號以及結構特點等。目前國內外測繪無人機主流機型及其參數如表1所示。
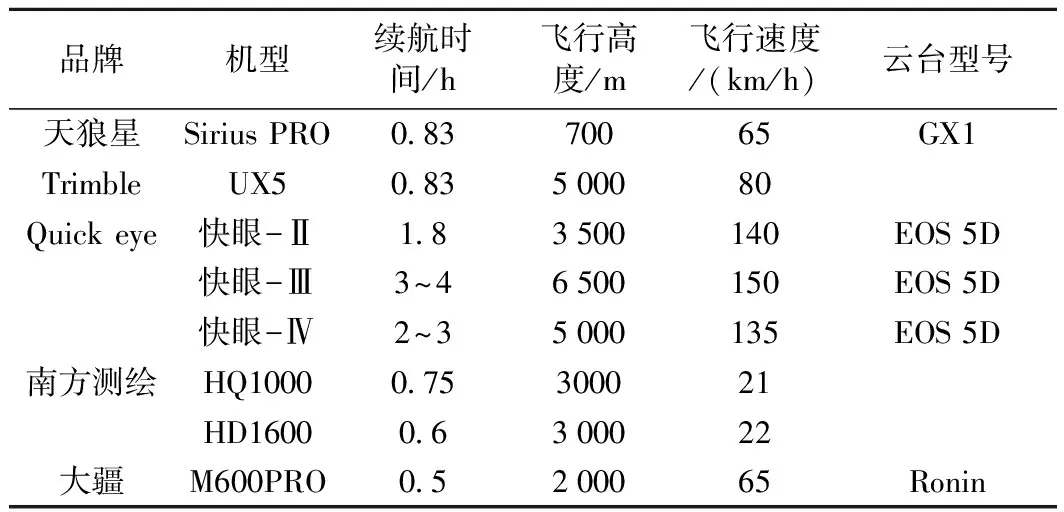
表1 目前測繪無人機的主流機型
本文所選取的是大疆MAVIC PRO型無人機,它體積小,易攜帶,起降方便,飛行平穩,遙測距離長,擁有一定的抗風雨能力,能夠滿足無人機應急測繪要求,具體參數見表2。
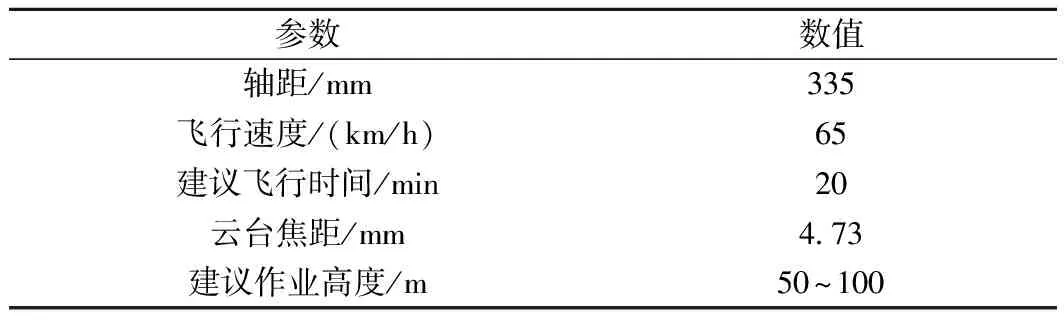
表2 大疆MAVIC無人機核心參數
1.3 施測方案設計
1.3.1 計算及設置航高
先根據正射影像圖(B類)的成圖比例確定影像地面分辨率(GSD),成圖比例尺與影響地面分辨率的關系見表3。
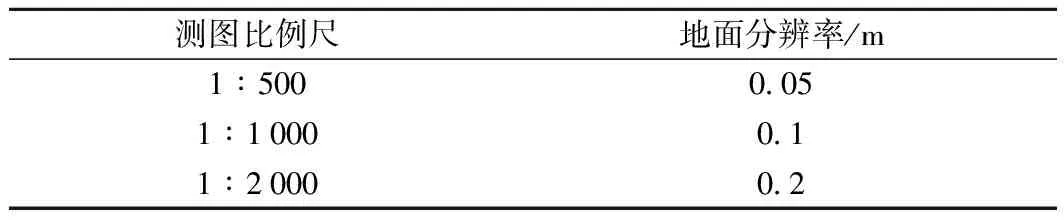
表3 測圖比例尺與地面分辨率對照
根據以下公式計算航高
(1)
式中,H為航高;GSD為地面分辨率;α為像元大小。
本實驗中航高設置為50 m,地面分辨率為0.045 m,滿足1∶500數字正射影像圖(B類)要求。
1.3.2 航帶設置
為了航測成圖的需要,考慮到航線網、區域網的構成及模型之間的連接,要求相鄰的3張航攝片應有公共重疊部分。航攝中,要保持適當的航向重疊和旁向重疊。一般要求,航向重疊度為60%~65%,旁向重疊度為30%~35%。在地面站使用Atizure軟件進行航帶設計,本實驗中航向重疊度為80%,旁向重疊度為60%,軟件中航帶設計如圖2所示。

圖2 航帶設計
將規劃好的航線導入飛行控制系統,地面控制子系統通過預設航向控制無人機飛行,正射攝影相機系統按照預設的航向和疊度進行拍攝。本實驗共得像片262張,利用飛控數據和導航數據來檢查航線的彎曲度、同一航線上的高度差等參數,經檢查均滿足無人機外業測量規范,具體航攝參數見表4。

表4 航攝參數
1.3.3 地面控制點的布設
布設控制點是為內業成圖和解算精度提供一定數量的符合規范要求、精度較高的控制點。控制點和檢測點均采用平高點,并通過采用不同方案確定控制點和檢測點來實現成圖精度的調整。根據帶狀地形圖的特點,沿著帶狀地形圖的兩側邊緣加密布點,中心線處適當減少控制點的數目,邊緣控制點的平均間距65 m,中心處的平均距離140 m。地面控制點采用1 m×1 m的棋盤格控制點靶標,共計37個,控制點的布設如圖3所示。
1.3.4 基于CORS系統測量控制點
本次實驗中運用的單基站CORS系統,是由一個連續運營的參考站及一個RTK組成。試驗中參考站一直處于運行狀態,通過登錄服務器,使用GMS數據鏈,通過CDMA網絡把標準實時差分數據發送給移動站,再由移動設備通過實時差分數據進行測量。
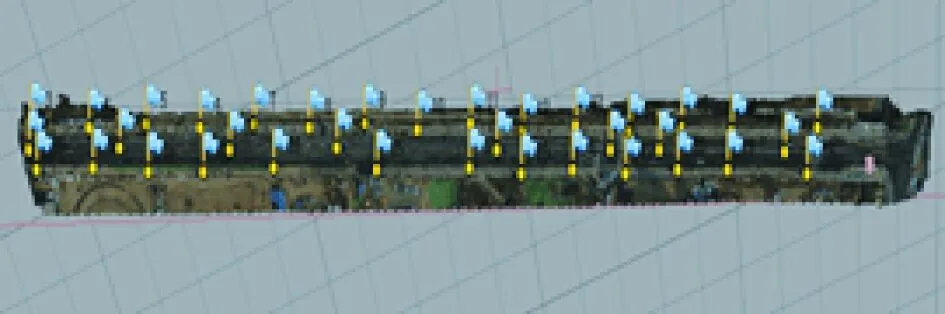
圖3 控制點布設
本實驗平高點的測量基于蘭州交通大學已建的CORS參考站,采用南方GNSS銀河Ⅰ型接收機(移動網絡模式)測量。實現于WGS-84坐標系統下的經緯度、高程的獲取,測量精度約為2 cm,并通過SOUTH衛星導航X3型手簿實現數據的記錄與導出。圖4和圖5分別展示了棋盤式靶標以及外業測量控制點。
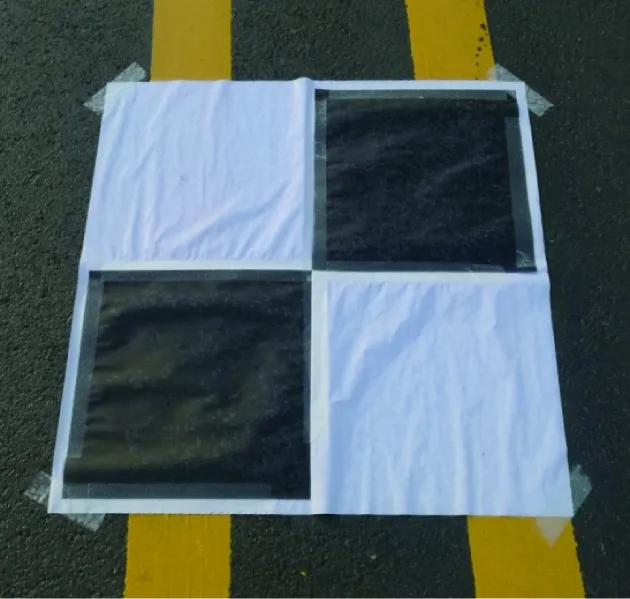
圖4 棋盤式靶標

圖5 GPS測量控制點坐標
2 大比例尺帶狀圖快速建模方法研究
基于獲取的251張航攝像片,使用Agisoft Photoscan軟件進行大比例尺帶狀圖快速建模方法研究,包括數據預處理和高精度DEM、DOM的生成。
2.1 無人機航攝數據預處理
內業數據預流程見圖6。
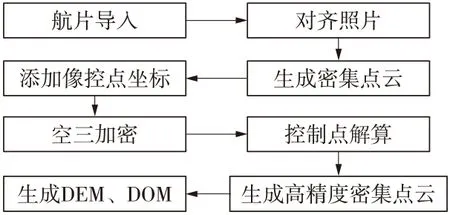
圖6 內業數據預流程
2.1.1 航片導入
添加航片,軟件自動識別并排列航片的空間位置(經緯度,高程,坐標系),如圖7所示。
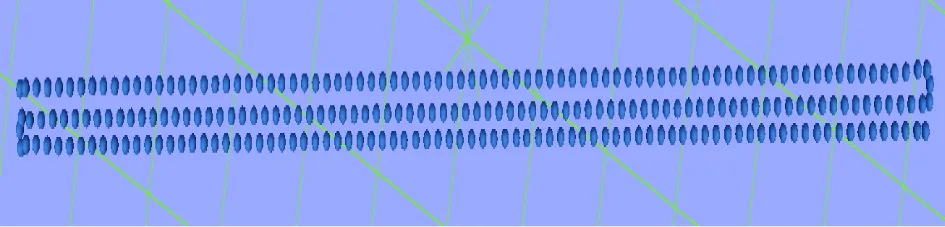
圖7 航片導入
2.1.2 對齊照片
“對齊照片”后,軟件會自動識別航片的相對位置和像片的偏轉角,如圖8所示。
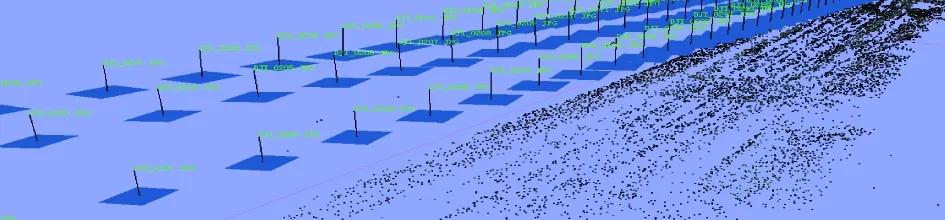
圖8 像片對齊
2.1.3 建立密集點云
“建立密集點云”時需選擇成圖精度,精度越高點云密度越高,但預處理時相片共計251張,數據較大,因此選擇中等精度,共得密集點云數28 407 664個。預處理后的密集點云如圖9所示。

圖9 實驗區密集點云
2.2 高精度DEM、DOM的生成
2.2.1 添加像控點坐標
在密集點云中找到外業布設的控制點圖形,并在該點創建標記點,后在該標記點所對應的像片中調整標記點與控制點重合。完成添加標記點后,需要賦予其絕對坐標值,密集點云的坐標系統應和控制點的坐標系統一致,均采用WGS-84坐標。圖10和圖11展示了控制點坐標的添加流程。

圖10 點云中添加標記點24

圖11 像片中點24
2.2.2高精度密集點云的生成;以及DEM、DOM的生成與導出
添加控制點坐標后,需對像片再次進行空三加密及控制點坐標的解算,生成新的密集點云,利用地面控制點的絕對坐標,實現對無人機相對坐標系統的絕對化轉換,得到具有絕對坐標系統的密集點云。
利用Agisoft Photoscan軟件生成DEM,再對航片進行拼接后,得到具有高精度的DOM。
2.3 內業數據具體化處理
通過上述方法處理后圖形有區域留白,因此要進行像片加密。實驗當天對該區域進行了兩次航攝(條件基本相同),利用第二次航攝的航片對該區域進行補充,共計航片262張,生成的密集點云數29 504 553個。圖12和圖13分別展示了相同區域的內業通用化處理結果和具體化處理成果。

圖12 通用處理結果

圖13 具體化處理結果
3 建模結果分析
3.1 處理成果
經過航測內業數據處理,完成了對試驗區實景三維模型(高程放大50倍)、正射影像、DEM以及等高線的生成,將結果導入ArcGIS軟件中,成圖效果如圖14、圖15所示。

圖14 帶狀模型實景三維模型

圖15 帶狀模型正射影像
3.2 精度評定
在測區內一共布置了37個控制點和檢測點,全部是平高點。后期處理時,有一個控制點無法進行標定故而放棄。在進行成果輸出時,本實驗最初分別挑選了6個、11個控制點,但由于圖形的畸變較大,無法滿足規范的要求。具體見圖16,在11個控制點時路面仍出現明顯的偏轉。

圖16 11個控制點下的正射影像
增加至14個控制點時得到了基于《低空數字航空攝影測量內業規范》的1∶500的數字正射影像圖(B類)及基于《基礎地理信息數字成果1∶500、1∶1 000、1∶2 000數字高程模型規范》的1∶2 000數字高程模型。
控制點和檢測點的空間布設如圖17所示,其中紅點為絕對控制點,黃色為檢測點。

圖17 控制點及檢查點布設
3.2.1 數字正射影像圖精度分析
基于試驗區內的22個地面檢測點的于WGS-84坐標系統下的實際測量值與同名點的圖測值進行比較,計算同名點的平面位置誤差,再通過中誤差評定對DOM平面精確度進行判定。表5給出了檢測點實測值與圖測值的經緯度坐標以及誤差,并制作精度分布圖如圖18所示。
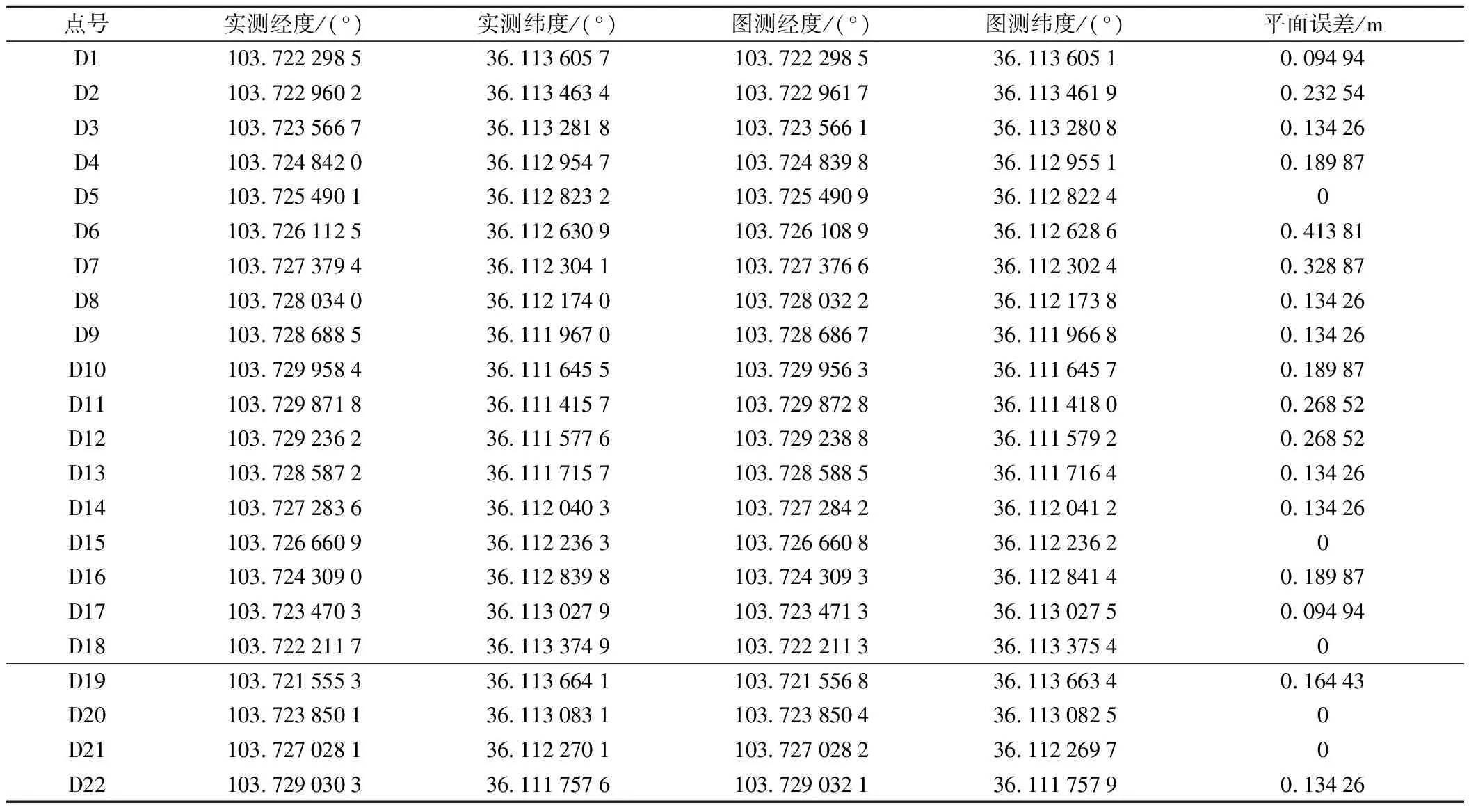
表5 DOM檢查點精度評測
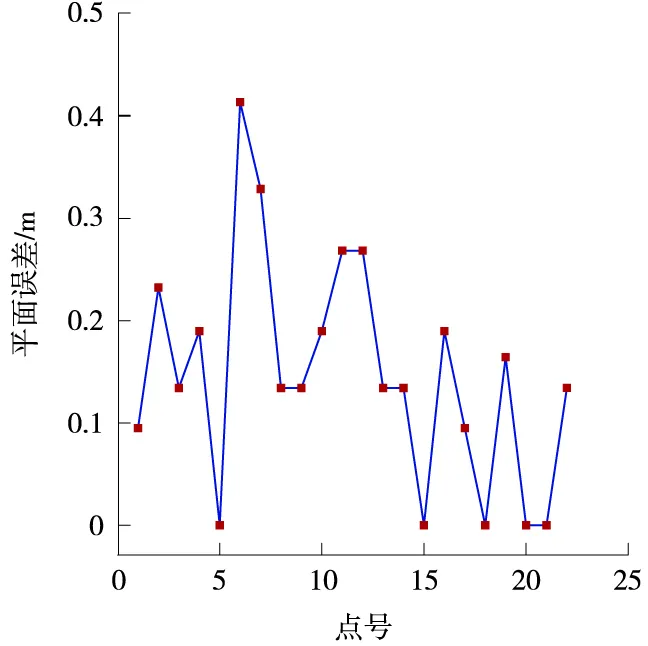
圖18 實驗區平面檢查點精度分布
經過對比分析平面的精度分布,其誤差范圍普遍分布于0~0.2 m。其中誤差較大的為點6、點7誤差分別達到0.42 m和0.33 m,分析原因如下:在這兩點處存在著遮蔽物對于內業控制點的選取存在干擾,造成測圖點位置偏差,最終造成誤差較大。
根據公式(2)計算平面位置中誤差
(2)
計算結果MS=0.183 m<0.2 m,故可得到在平地條件下的1∶500正射影像圖(B類)。
3.2.2 數字高程模型精度分析
基于實驗區內的22個地面檢測點的高程實際測量值與同名點的圖測值進行比較,計算同名點的高程誤差,通過中誤差對高程精確度進行評定。
表6給出了檢測點實測值與圖測值的高程值以及誤差,并制作精度分布圖如圖19所示。
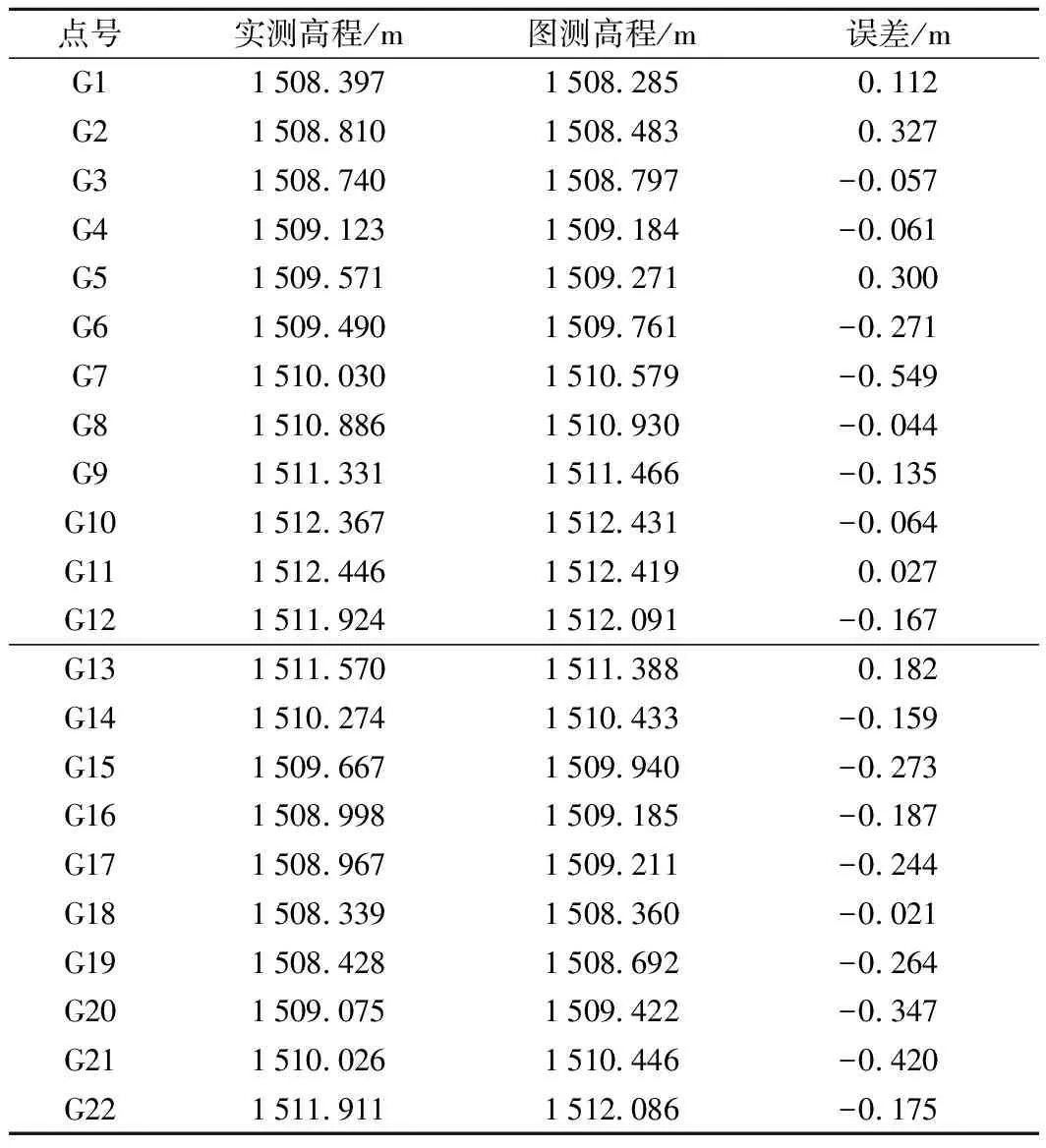
表6 DEM高程精度評測
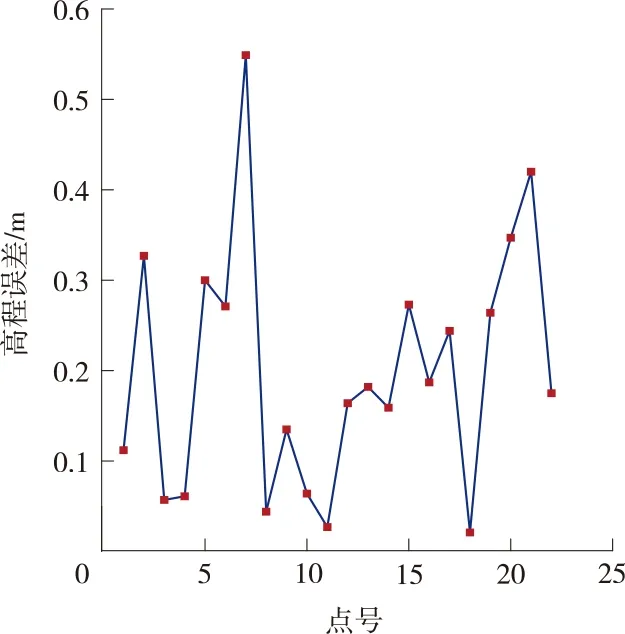
圖19 實驗區平面檢查點精度分布
經過對比高程的精度分布,其誤差范圍普遍分布于0.1~0.3 m。其中誤差較大的分別為點7、點21,誤差達到0.549 m及0.402 m,現就點21進行說明,點21在無人機航測時處于陰影中,在進行圖片校正時出現誤差,導致成圖精度低,故而高程影響較大。
根據公式(3)計算高程中誤差
(3)
計算結果MS=0.24 m<0.4 m,滿足在平地條件下,一級1∶2 000的數字高程模型。
4 結論
通過對“短、平、直”帶狀區域進行無人機航測實驗,完成了大比例尺帶狀地形圖的建模研究,論證了無人機在鐵路與公路應急測繪中的可行性,取得的初步成果如下。
(1)外業中,在試驗區采用邊角加密布點法,并選擇像控點的不同組合為地面控制點。
在14個控制點時得到了滿足規范的DEM、DOM。外業使用CORS技術測量控制點,可更快速、高效地獲取控制點的坐標。
(2)采用通用的內業處理流程對航片進行具體化處理,得到沒有留白的密集點云。對內業生成的圖測點與實測點進行處理,評估得到了符合標準的1∶500的DOM和1∶2 000的DEM,并對偏差較大的點進行了分析。
無人機能夠在災害環境中完成勘測任務,同時實現了利用無人機在短時間內得到大比例尺帶狀地形圖,為應用無人機技術在鐵路應急勘測提供了新方法。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00