基于MD-CUSUM和TD-SVR的滾動(dòng)軸承健康狀態(tài)預(yù)測
2018-10-20 02:12:26夏均忠呂麒鵬陳成法劉鯤鵬鄭建波
振動(dòng)與沖擊 2018年19期
夏均忠,呂麒鵬,陳成法,劉鯤鵬,鄭建波
(陸軍軍事交通學(xué)院 軍用車輛實(shí)驗(yàn)實(shí)習(xí)中心,天津 300161)
滾動(dòng)軸承技術(shù)狀態(tài)描述的關(guān)鍵是其故障特征提取,然而常用方法提取到的故障特征存在著特征空間過大,不能單調(diào)性描述軸承健康狀態(tài)等問題。為了解決這些不足,需要對特征向量進(jìn)行降維處理。最常用的線性降維方法有主成分分析和線性判別法[1]。由于其特征空間壓縮過程具有不可控性和隨機(jī)性,效果不穩(wěn)定,并且對具有非線性關(guān)系的數(shù)據(jù)處理能力較差。而非線性降維方法具有更好的表現(xiàn)。局部線性切空間法[2]利用局部空間考慮全局因素,不可避免會(huì)損失特征性質(zhì)。多維尺度法(Multidimensional Scaling,MDS)[3]利用一維空間中的目標(biāo)距離反映數(shù)據(jù)之間的相似性,但其“目標(biāo)距離”的計(jì)算效果一般。由此等距映射法(Isometric Feature Mapping,ISOMAP)[4]利用測地距離取代歐式距離,然后進(jìn)行MDS取得了更好的效果,但是準(zhǔn)確度不佳。累積馬氏距離(Cumulative Sum and Mahalanobis Distance,MD-CUSUM)[5]與其他方法存在著本質(zhì)上的區(qū)別,它充分發(fā)揮馬氏距離在特征相似度檢驗(yàn)上的優(yōu)點(diǎn),對特征值進(jìn)行累積和(Cumulative Sum,CUSUM)檢驗(yàn),獲得能夠準(zhǔn)確反映軸承健康狀態(tài)的低維特征,并增強(qiáng)了其單調(diào)性。
支持向量回歸(Support Vector Regression,SVR)是一種基于結(jié)構(gòu)風(fēng)險(xiǎn)最小化原理,具有出色的小樣本學(xué)習(xí)能力的預(yù)測模型,其常用于軸承健康狀態(tài)預(yù)測[6]。當(dāng)前許多學(xué)者主要對SVR參數(shù)的選擇進(jìn)行優(yōu)化[7-9],而對于其輸入與輸出的相互關(guān)系沒有太多考慮。本文結(jié)合軸承健康狀態(tài)的時(shí)間屬性,定義輸入與輸出之間的時(shí)間滯后(Time Delay)關(guān)系,構(gòu)建時(shí)滯性支持向量回歸(Time Delay Support Vector Regression,TD-SVR)模型,實(shí)現(xiàn)由當(dāng)前狀態(tài)預(yù)測未來狀態(tài)的目的。
首先應(yīng)用累積馬氏距離(MD-CUSUM)獲取反應(yīng)軸承健康狀態(tài)的健康指標(biāo)(Health Indicator,HI),其次構(gòu)建時(shí)滯性支持向量回歸模型對滾動(dòng)軸承健康指標(biāo)進(jìn)行預(yù)測,最后通過試驗(yàn)對比分析了MD-CUSUM方法和ISOMAP方法的優(yōu)劣,論證MD-CUSUM和TD-SVR相結(jié)合的方法在軸承健康狀態(tài)描述和預(yù)測方面的優(yōu)越性。
1 累積馬氏距離(MD-CUSUM)
馬氏距離(Mahalanobis Distance,MD)是印度統(tǒng)計(jì)學(xué)家Mahalanobis在歐式距離基礎(chǔ)上提出的一種方法,它可以有效地反應(yīng)兩個(gè)未知樣本的相似度,其優(yōu)點(diǎn)在于克服了歐氏距離存在的不足,排除變量之間的相關(guān)性干擾,具有較好的敏感性[10]。馬氏距離算法步驟如下
步驟1 計(jì)算均值和標(biāo)準(zhǔn)差
(1)
(2)
步驟2 計(jì)算相關(guān)參數(shù)
Dp×q=diji=1,2…p,j=1,2…q
(3)
式中:p為檢測點(diǎn)數(shù);q為特征數(shù)量;dij為第i個(gè)檢測點(diǎn)的第j個(gè)特征值;Dp×q為特征值矩陣。
(4)
(5)
(6)
式中:cij表示距離參數(shù)。
步驟3 馬氏距離計(jì)算公式
(7)
式中:Q為特征向量的協(xié)方差矩陣。
盡管馬氏距離在反應(yīng)數(shù)據(jù)之間的相似度方面有較好的表現(xiàn),但是當(dāng)數(shù)據(jù)樣本之間存在著連續(xù)微小變化的情況下,很難單純地從馬氏距離上反應(yīng)各數(shù)據(jù)樣本的狀態(tài),因此引入累積和檢驗(yàn)對馬氏距離進(jìn)行優(yōu)化。
累積和(Cumulative Sum,CUSUM)檢驗(yàn)是由英國劍橋大學(xué)Page基于似然比導(dǎo)出的一種控制圖模型[11]。它可以通過不斷累積待測值與標(biāo)準(zhǔn)值的差值,從而達(dá)到放大數(shù)據(jù)波動(dòng)的目的,因此能夠更加迅速、敏感地檢測到微小的變化情況。其計(jì)算公式如下
(8)
(9)
S0=δ0+k
(10)

對滾動(dòng)軸承振動(dòng)信號數(shù)據(jù)樣本的MD值進(jìn)行累積和(CUSUM)檢驗(yàn),通過樣本變化累積值表征軸承退化性能,準(zhǔn)確反應(yīng)軸承健康狀態(tài)的單調(diào)性。本文選擇CUSUM正向累積值作為目標(biāo)參數(shù),定義為軸承健康指標(biāo)(HI)
(11)
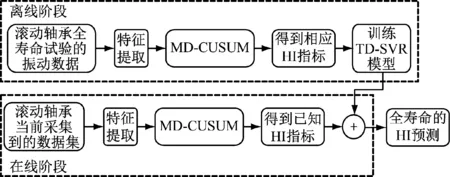
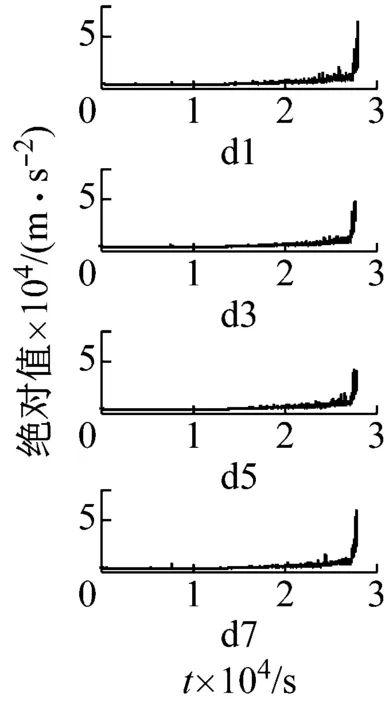
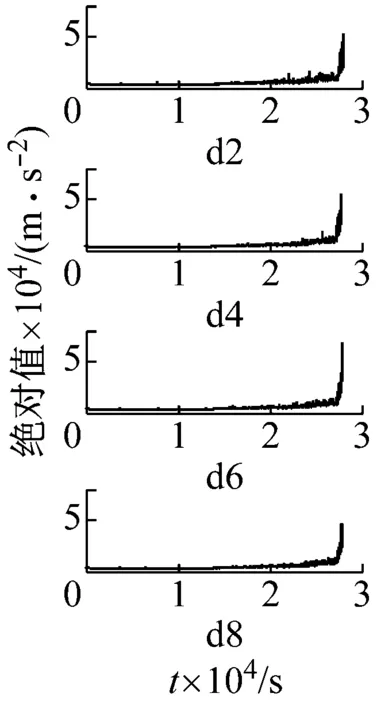
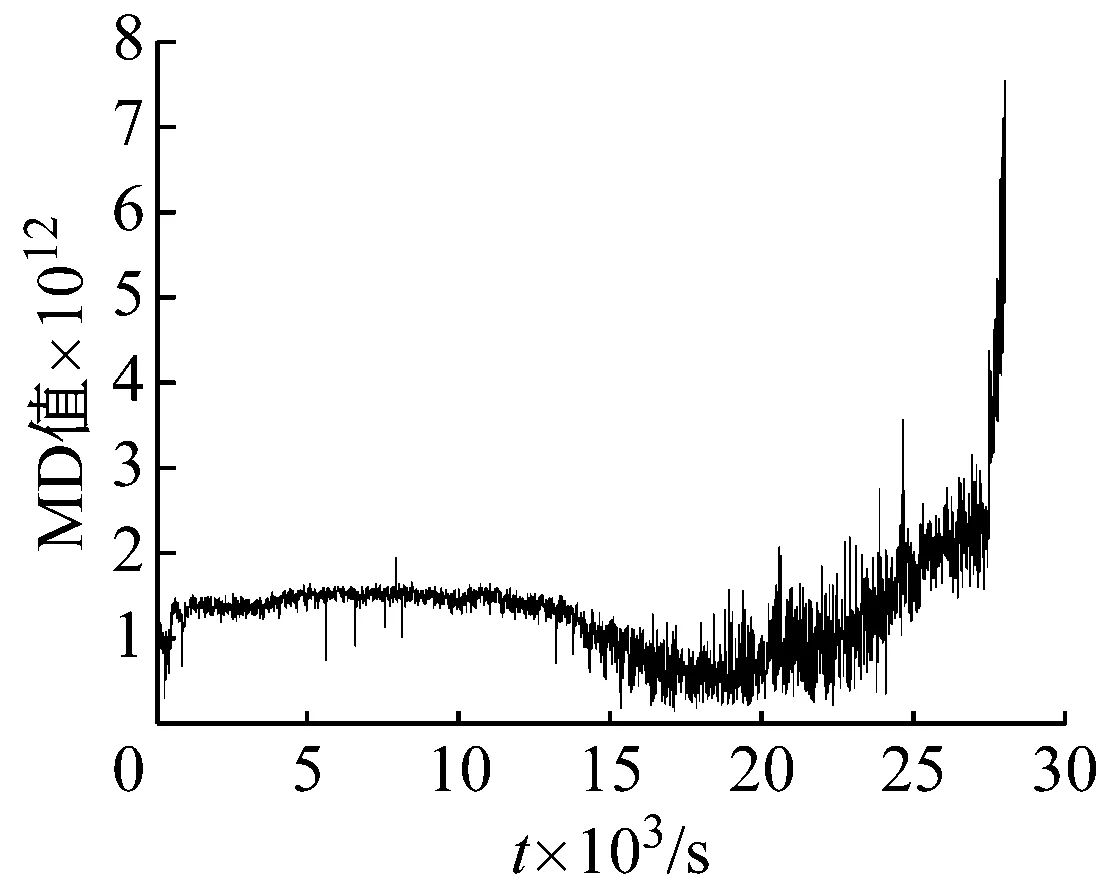
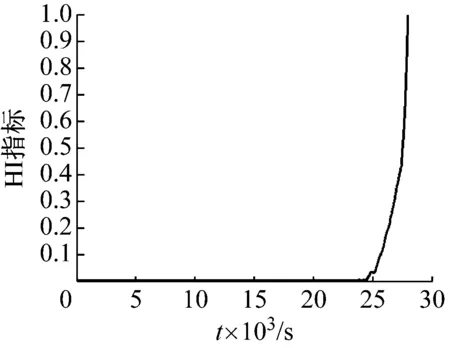
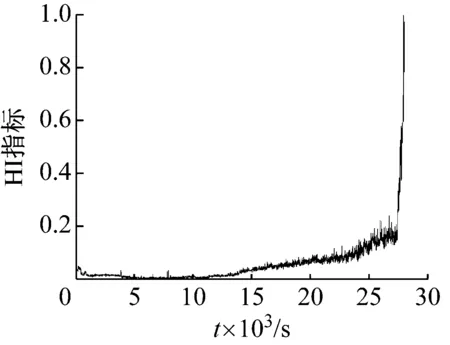
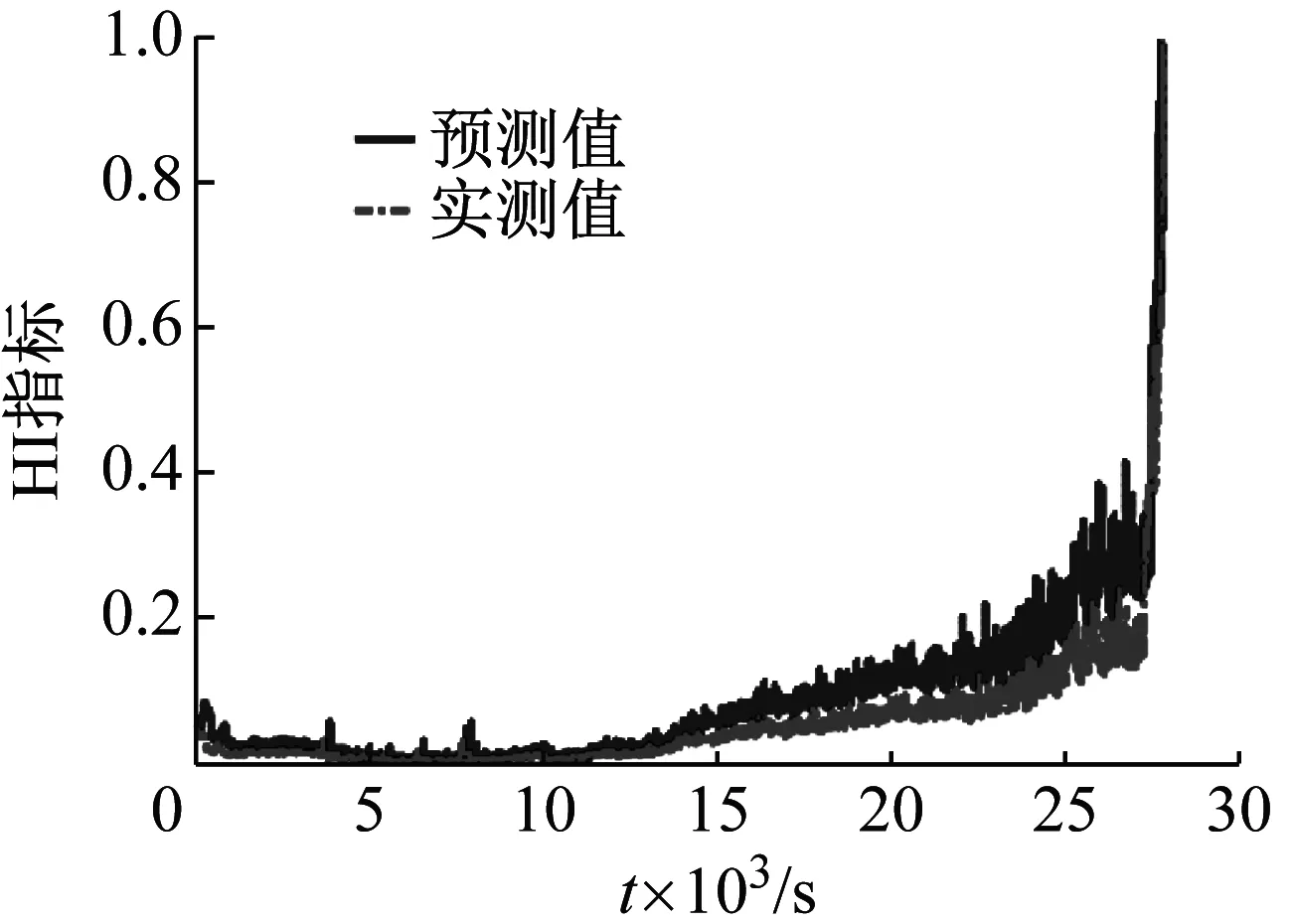
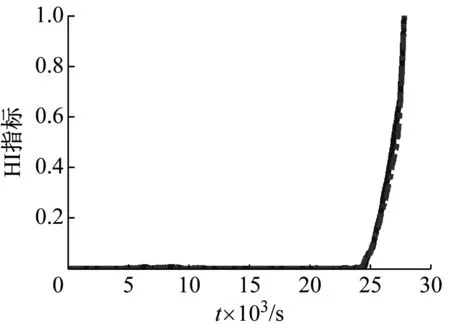
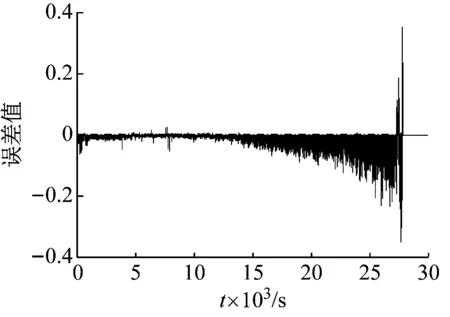
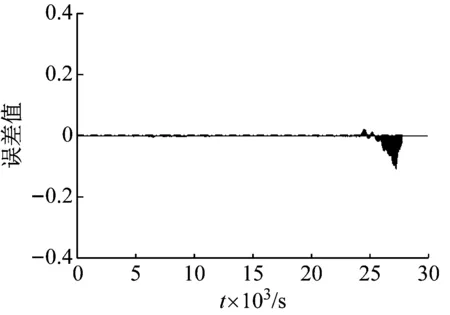
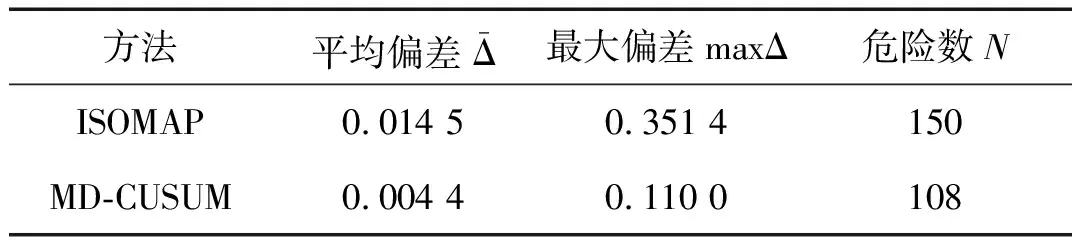
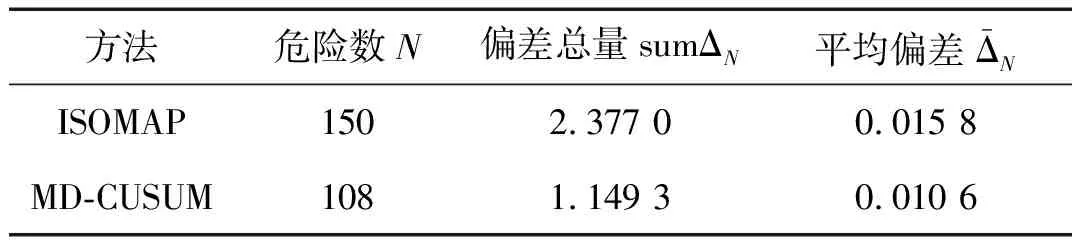
為了便于計(jì)算和分析,統(tǒng)一把指標(biāo)進(jìn)行歸一化處理(式(12)),即0 (12) 式中:reg,reg′分別為需要進(jìn)行歸一化的原始數(shù)據(jù)和歸一化之后的數(shù)據(jù)。 支持向量回歸(SVR)是典型的自回歸模型,是支持向量機(jī)用于解決回歸問題時(shí)的推廣形式[12]。支持向量回歸包括線性回歸和非線性回歸,由于提取的滾動(dòng)軸承特征具有非線性,故采用非線性支持向量回歸,并對其輸入和輸出進(jìn)行改進(jìn),得到時(shí)滯性支持向量回歸。 時(shí)滯性支持向量回歸(TD-SVR)就是在沒有先驗(yàn)知識(shí)的前提下,尋找具有時(shí)滯性的輸入和輸出變量之間的聯(lián)合分布關(guān)系,可以由一個(gè)函數(shù)表示:y=f(x)。X表示一個(gè)訓(xùn)練集,X={xi,xi+Δt,i=1,…l},xi是第i個(gè)訓(xùn)練樣本,xi+Δt是第i個(gè)訓(xùn)練樣本的目標(biāo)值(即時(shí)滯Δt后的樣本值),l是訓(xùn)練樣本的容量。訓(xùn)練支持向量回歸就是找到一個(gè)回歸函數(shù) (13) (14) 通過最小化目標(biāo)函數(shù)求得 (15) 因此,時(shí)滯性支持向量回歸可以簡化為 (16) 基于MD-CUSUM和TD-SVR的滾動(dòng)軸承健康狀態(tài)預(yù)測流程,如圖1所示。 圖1 健康狀態(tài)預(yù)測流程圖Fig.1 Flowchart of predicting health state 離線階段: (1)輸入信號,進(jìn)行特征提取。 (2)應(yīng)用MD-CUSUM獲取軸承健康指標(biāo)。 (3)訓(xùn)練時(shí)滯性支持向量回歸模型。 在線階段: (1)采集軸承實(shí)時(shí)信號,進(jìn)行特征提取。 (2)應(yīng)用MD-CUSUM獲取軸承當(dāng)前健康指標(biāo)。 (3)把當(dāng)前指標(biāo)輸入到訓(xùn)練好的模型,獲取軸承全壽命健康指標(biāo)預(yù)測值。 定義 2.3 設(shè){Xt;R+}是L2(Γ;η)中稠定線性算子族,對于?R+,若存在L2(Γ;η)上稠定線性算子Yt,滿足 與其他降維方法相比,MD-CUSUM不僅可以在低維空間上較好地反應(yīng)軸承健康狀態(tài),而且能夠識(shí)別特征之間更加微小的變化,增強(qiáng)了軸承健康狀態(tài)在全壽命上的單調(diào)性。其次TD-SVR在支持向量回歸的基礎(chǔ)上增加時(shí)滯性,融合時(shí)間特征,更加符合軸承全壽命健康狀態(tài)的預(yù)測要求。 試驗(yàn)驗(yàn)證的數(shù)據(jù)來源于PRONOSTIA實(shí)驗(yàn)平臺(tái)[13]。其主要由驅(qū)動(dòng)電機(jī)、聯(lián)軸器、壓力氣缸、扭力計(jì)、加速度傳感器、溫度傳感器和NI數(shù)據(jù)采集卡等組成[14]。 試驗(yàn)采集軸承的振動(dòng)信號,兩個(gè)加速度傳感器(靈敏度為100 mv/g)分別位于豎直(12點(diǎn)鐘)和水平(3點(diǎn)鐘)方向。試驗(yàn)數(shù)據(jù)包括軸承的全壽命數(shù)據(jù),即從健康狀態(tài)到軸承完全損壞為止。試驗(yàn)軸承轉(zhuǎn)速為1 800 r/min,負(fù)載為4 000 N,采樣頻率為25.6 kHz,采樣間隔為每10 s采集0.1 s的數(shù)據(jù)即每組數(shù)據(jù)包含2 560個(gè)數(shù)據(jù)點(diǎn)。歷時(shí)7小時(shí)47分鐘,共采集2 803組數(shù)據(jù)。 小波包分解能夠?qū)崿F(xiàn)頻帶的均勻劃分,克服了小波變換對高頻信號檢測精度較低的不足,由于軸承健康狀態(tài)的變化在時(shí)間上相對緩慢,單一從低頻部分或某一頻域上很難準(zhǔn)確反映健康狀態(tài)的發(fā)展,因此具有全頻域、高精度特點(diǎn)的小波包分解能更好地反應(yīng)軸承當(dāng)前技術(shù)狀態(tài)[15]。對數(shù)據(jù)進(jìn)行三層小波包分解,得到8個(gè)小波包。對每一時(shí)刻數(shù)據(jù)分別進(jìn)行特征提取,計(jì)算每個(gè)小波包的絕對值之和,如圖2所示。 圖2 某一時(shí)刻小波包分解結(jié)果Fig.2 Features extracted using wavelet packet decomposition as a time point 為了便于比較分析,對各小波包能量進(jìn)行歸一化處理(式(12)),由此可以得到八維的向量空間,能夠較為準(zhǔn)確反應(yīng)軸承的健康狀態(tài)。 上述得到的特征向量維度較高,這對于反應(yīng)軸承健康狀態(tài)的全面性很好,但是對于健康狀態(tài)的描述評價(jià)以及之后模型的訓(xùn)練和預(yù)測來說十分不便。因此需要對高維特征進(jìn)行降維處理,得到健康指標(biāo)(HI)。 為對比分析,應(yīng)用等距特征映射(ISOMAP)對高維特征進(jìn)行降維。等距特征映射是麻省理工學(xué)院JoshTenenbaum教授于2000年提出的算法[16]。其降維思想是對高維數(shù)據(jù)使用測地距離來代替歐式距離,得到高維數(shù)據(jù)測地距離矩陣之后再進(jìn)行多維尺度(MDS)分析處理,得到高維數(shù)據(jù)從高維空間到低維空間的映射關(guān)系。應(yīng)用ISOMAP把八維特征映射成一維特征,即健康指標(biāo)(HI),其結(jié)果如圖5所示。 圖3 特征在時(shí)域上的馬氏距離(MD)Fig.3 MD of features in time domain 圖4 MD-CUSUM處理得到的HI指標(biāo)Fig.4 HI using MD-CUSUM 圖5 ISOMAP處理得到的HI指標(biāo)Fig.5 HI using ISOMAP 應(yīng)用時(shí)滯性支持向量回歸對軸承全壽命健康狀態(tài)進(jìn)行預(yù)測。選取一定量的訓(xùn)練樣本,其輸入為時(shí)間t時(shí)刻的一維特征指標(biāo)HIt,輸出為滯后時(shí)間Δt之后的特征指標(biāo)HIt+Δt,構(gòu)建所需的時(shí)滯性支持向量回歸(TD-SVR)模型。 對時(shí)滯性支持向量回歸(TD-SVR)模型進(jìn)行訓(xùn)練,而模型訓(xùn)練的準(zhǔn)確度與支持向量回歸核函數(shù)的選擇息息相關(guān)。核函數(shù)的性能可以由其相應(yīng)的均方根值來反應(yīng),均方根值越小表示相應(yīng)核函數(shù)的性能越好,模型預(yù)測的準(zhǔn)確度越高。通過選擇不同的核函數(shù)對模型進(jìn)行構(gòu)建并計(jì)算其均方根值,結(jié)果見表1。 表1 不同核函數(shù)的性能Tab.1 Performance of Kernel functions 高斯徑向基核函數(shù)的性能最好,構(gòu)建的模型也最優(yōu)。高斯模型的參數(shù)設(shè)置范圍為{10-6,10-5…,1},其中參數(shù)為σ=10-5時(shí)最優(yōu)。 選擇Δt=20,即時(shí)滯為200 s。模型輸入選擇均勻分布的80個(gè)離散樣本點(diǎn),輸出為其時(shí)滯的HI指標(biāo)。應(yīng)用ISOMAP、MD-CUSUM得到的HI指標(biāo)分別進(jìn)行TD-SVR預(yù)測,其結(jié)果如圖6所示。 從圖6中可以較為明顯地看出MD-CUSUM的HI指標(biāo)TD-SVR預(yù)測結(jié)果相比于前者的預(yù)測結(jié)果更優(yōu)。 為了更加直觀地比較兩種方法的優(yōu)劣,首先計(jì)算結(jié)果的偏差值ΔHIi,如圖7所示。 (17) 應(yīng)用ISOMAP的HI指標(biāo)TD-SVR預(yù)測誤差較大;兩種方法在軸承的全壽命HI指標(biāo)預(yù)測上都存在不同程度的較大誤差。由圖4可知,試驗(yàn)軸承在接近25 000 s時(shí),產(chǎn)生了健康狀態(tài)突變即發(fā)生了較為明顯的故障,兩種方法在故障發(fā)生前后對于HI指標(biāo)的預(yù)測都出現(xiàn)較為明顯的偏差和波動(dòng)。 (a)應(yīng)用ISOMAP的HI指標(biāo)TD-SVR預(yù)測 (b)應(yīng)用MD-CUSUM的HI指標(biāo)TD-SVR預(yù)測 (18) 式中:l為樣本數(shù)量。 maxΔ=max|ΔHIi| (19) (a)應(yīng)用ISOMAP的HI指標(biāo)TD-SVR預(yù)測誤差 (b)應(yīng)用MD-CUSUM的HI指標(biāo)TD-SVR預(yù)測誤差 (20) 根據(jù)式(18)、(19)、(20)和ΔHIi計(jì)算其誤差指標(biāo),見表2。 表2 誤差指標(biāo)Tab.2 Error indicators 在平均偏差和最大偏差方面,MD-CUSUM均比ISOMAP更優(yōu),HI指標(biāo)的TD-SVR預(yù)測結(jié)果更接近實(shí)際情況。 對于危險(xiǎn)數(shù)N,當(dāng)ΔHIi>0時(shí),即預(yù)測值小于實(shí)際值時(shí),表示軸承預(yù)測健康狀態(tài)好于實(shí)際健康狀態(tài),這對于軸承運(yùn)行和維護(hù)的安全性是不利的,正確的預(yù)測結(jié)果應(yīng)該是保守預(yù)測,即預(yù)測的健康狀態(tài)劣于實(shí)際健康狀態(tài),這樣才能保證軸承運(yùn)行和維護(hù)的安全性。在統(tǒng)計(jì)的2 783組試驗(yàn)數(shù)據(jù)中,ISOMAP有150個(gè)時(shí)刻的預(yù)測結(jié)果存在危險(xiǎn)性,達(dá)到了5.390%,MD-CUSUM方法只有108個(gè)時(shí)刻,3.881%的預(yù)測存在危險(xiǎn)性。 為了更加直觀反應(yīng)兩種方法在預(yù)測安全性上的優(yōu)劣,對危險(xiǎn)數(shù)N進(jìn)一步分析。對于存在預(yù)測危險(xiǎn)的時(shí)刻,計(jì)算其偏差量,結(jié)果見表3。其可以反映其危險(xiǎn)發(fā)生的概率,偏差量越大表示其發(fā)生危險(xiǎn)的概率越大。ISOMAP在危險(xiǎn)數(shù)和危險(xiǎn)發(fā)生幾率上都高于MD-CUSUM,體現(xiàn)了后者在軸承健康狀態(tài)預(yù)測方面具有更高的安全性。 表3 危險(xiǎn)數(shù)指標(biāo)Tab.3 Indicators of dangerous 根據(jù)上述試驗(yàn)分析對比,MD-CUSUM的健康指標(biāo)在軸承健康狀態(tài)描述上能更好地增強(qiáng)其壽命單調(diào)性,描述更準(zhǔn)確;TD-SVR模型在軸承健康狀態(tài)預(yù)測上擁有更突出地表現(xiàn),其結(jié)果更優(yōu)。 論文首先系統(tǒng)研究了累積馬氏距離(MD-CUSUM)的含義,得到反應(yīng)軸承健康狀態(tài)的低維特征健康指標(biāo)(HI);其次構(gòu)建時(shí)滯性支持向量回歸(TD-SVR)對滾動(dòng)軸承HI指標(biāo)進(jìn)行預(yù)測;最后通過試驗(yàn)驗(yàn)證,對比分析了ISOMAP和MD-CUSUM在軸承健康狀態(tài)描述和預(yù)測方面的效果,后者具有明顯的優(yōu)勢。 (1)MD-CUSUM克服了馬氏距離在反應(yīng)樣本微小變化和滾動(dòng)軸承健康狀態(tài)單調(diào)性存在的不足,應(yīng)用累積和理論增強(qiáng)馬氏距離對變化的敏感性以及健康狀態(tài)的單調(diào)性,能更準(zhǔn)確地描述軸承健康狀態(tài)。 (2)時(shí)滯性支持向量回歸模型以支持向量回歸為基礎(chǔ),建立輸入和輸出的時(shí)滯性關(guān)系,更好地契合了滾動(dòng)軸承全壽命預(yù)測,實(shí)現(xiàn)由已知當(dāng)前軸承健康狀態(tài)預(yù)測軸承全壽命健康狀態(tài)的目的。 (3)基于MD-CUSUM和TD-SVR相結(jié)合的方法能更清晰、全面反應(yīng)軸承健康狀態(tài),能敏感識(shí)別出軸承健康狀態(tài)突變點(diǎn);在健康狀態(tài)預(yù)測上能更準(zhǔn)確地對全壽命HI指標(biāo)進(jìn)行預(yù)測,精度更高,安全性更好。2 時(shí)滯性支持向量回歸(TD-SVR)

3 健康狀態(tài)預(yù)測流程
4 試驗(yàn)驗(yàn)證
4.1 特征提取
4.2 健康指標(biāo)獲取

4.3 模型構(gòu)建

4.4 結(jié)果分析
5 結(jié) 論
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
數(shù)學(xué)小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
世界科學(xué)技術(shù)-中醫(yī)藥現(xiàn)代化(2020年2期)2020-07-25 02:05:36
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學(xué)小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03