輔磁同步磁阻電動機低轉矩脈動下轉子結構優化
2018-10-20 01:11:52代希杰張廣明
微特電機 2018年10期
代希杰,張廣明,鄧 歆
(南京工業大學,南京 211816)
0 引 言
永磁輔助同步磁阻電動機(以下簡稱PMaSynRM)的橫截面幾何形狀如圖1所示,相當于在同步磁阻電機(以下簡稱SynRM)轉子層中插入永磁體,故也可稱內置式永磁同步電動機(IPMSM)。PMaSynRM和SynRM相比于感應電機,有更高的轉矩密度和效率,而PMaSynRM比SynRM轉矩脈動要小得多,因此PMaSynRM在業界越來越廣泛使用,此類型的電機已在文獻[1-3]中作了一些比較。然而,PMaSynRM也有一些固有的缺點,例如電機在高

圖1 PMaSynRM的橫截面
速弱磁區域運行時,永磁體和d軸的大電流產生的磁鏈難以控制[4]。因此,PMaSynRM的設計引起行業和研究者的極大興趣[5-7]。
有研究開始探索如何合理利用和放置永磁材料來獲得高效率、大轉矩且低轉矩脈動的電機。PMaSynRM應運而生,并認為是永磁電機和磁阻電機的最佳替代品[8]。根據轉子上永磁體放置方式的不同,PMaSynRM可分為單層內置、雙層內置、三層內置、軸向疊片內置,其中單層內置式中包含徑向式、切向式、V式、U式[9]。文獻[10-12]中,VagatiA認為SynRM定子齒槽數一定時,當β=α/2(如圖2所示),位于轉子q軸處的2β相當于在轉子上開的虛槽,此時轉矩脈動最小;在文獻[13]中,Bianchi

圖2 PMaSynRM一個磁極下的幾何結構
N設計的R型模塊:vb1=14.8°,vb2=24.7°;設計的J型模塊:vb1=22.2°,vb2=40.2°;到優化后的“Machaon”型模塊,vb角介于R型和J型之間在達到轉矩脈動較低的同時,轉矩質量也較可觀。
本文主要對轉子中永磁體和磁障位置的放置和形狀進行設計及優化,通過仿真軟件Maxwell得到轉矩及脈動,對比試驗結果,從而得到最優值。最后通過分析等效磁路模型來預測開路氣隙磁通密度分布,并與有限元分析得到的氣隙磁通密度分布相對比,得到誤差在5%以內,檢驗此分析模型下的等效磁路法的正確性。
1 磁體與磁障徑向段選取策略
對永磁體厚度的優化,既要確保q軸電感較小,以增大凸極率,又要避免過多的浪費,降低成本,還要確保厚度太薄后電機在滿載運行時的退磁現象。對永磁體厚度的選擇在文獻[14-15]中有詳細的探討。
從轉矩公式和弱磁控制[16-17]可以看出,d,q軸的電感差值越大,磁阻轉矩值越可觀, 磁場調節代價也越小。因此,磁障徑向寬度設計的主要追求目標是最大限度地增大d,q軸磁阻差,即提高凸極率。其磁障徑向d,q軸尺寸設計如圖2所示,通過β角處的虛槽間距以調整α角,借助Maxwell仿真得出最優轉矩質量與轉矩波動。
由于q軸上存在多層永磁材料(其磁導特性近似于氣隙),阻礙q軸磁力線通過,使q軸電感由氣隙和永磁體層相疊加而成,因而在氣隙中產生的磁動勢波形如圖3所示,圖中每個柱形對應相應的α角及si間距。

圖3 磁動勢交軸反應
2 參數選取與仿真結果比較
在圖2中,ti(i=1,…,k)為在q軸上第i層永磁體的厚度,lmagnet表示q軸上k層永磁體厚度的總和(lmagnet=t1+…+ti);si(i=1,…,k)為在q軸上第i層軟磁材料的寬度,liron表示q軸上k層軟磁材料寬度的總和(liron=s1+…+si);+α表示轉子從q軸處旋轉的機械角;而:
kmq=lmagnet/liron
(1)
(2)
式中:kmq為q軸上總的永磁體厚度與軟磁材料寬度的比值(此比值直接影響著凸極率的大小);α為轉子內磁障夾角;β為最后層磁障基于α的控制角;p為磁極對數;k為磁障層數,本文取k為3。
在圖3中,可有:
(3)
(4)
Δfi-1=fqi-fqi-1i=2,…,k
(5)
(6)
如圖4所示,d軸上電感在氣隙中產生的磁動勢波形對應的d軸磁動勢間距:
(7)
(8)
(9)
(10)

圖4 磁動勢直軸反應
kmq=0.7時,改變β角而產生的轉矩和轉矩脈動,在圖5、圖6中描繪出來。圖5給出不同β角下的平均轉矩和轉矩脈動峰峰值,由圖5可以知道,在-3°到0區間內,轉矩脈動可以降到最低。圖6為不同角度下的轉矩曲線,可以看到在一個周期40 ms內的轉矩波動狀況,圖6中給出α為13.9°,12.9°,10°,β相應為-3.75°,0,10°的轉矩曲線。

圖5 平均轉矩與

圖6 轉矩曲線(Is=50 A,
3 PMaSynRM空載磁路分析
本節討論PMaSynRM在空載狀態下運行時,電機內整個磁場的分布狀態。圖7顯示PMaSynRM在有限元分析下描繪的磁力線分布。

圖7 有限元分析下的磁力線圖
氣隙橫截面面積可分為3個部分:
Sg1=Sg2=α(Rrotor+g/2)Lstk
(11)
Sg3=(α+β)(Rrotor+g/2)Lstk
(12)
從圖7中的磁通路徑可看出,通過Sg1磁力線φg1由PM1所激勵;通過Sg2磁力線φg2由PM1和PM2所激勵;而通過Sg3磁力線φg3由PM1,PM2和PM3所激勵。并假定Sg2區磁通是由PM1和PM2所在的Δ1=(wm2-wm3)/2區所激勵,Sg1區磁通是由PM1所在的Δ2=(wm1-wm2)/2區所激勵。因此,圖8為一個磁極通過這3個區域所對應的氣隙磁通密度分布曲線和對應電阻Rgi=g/(μ0Sgi),i為相應的1,2,3區域。
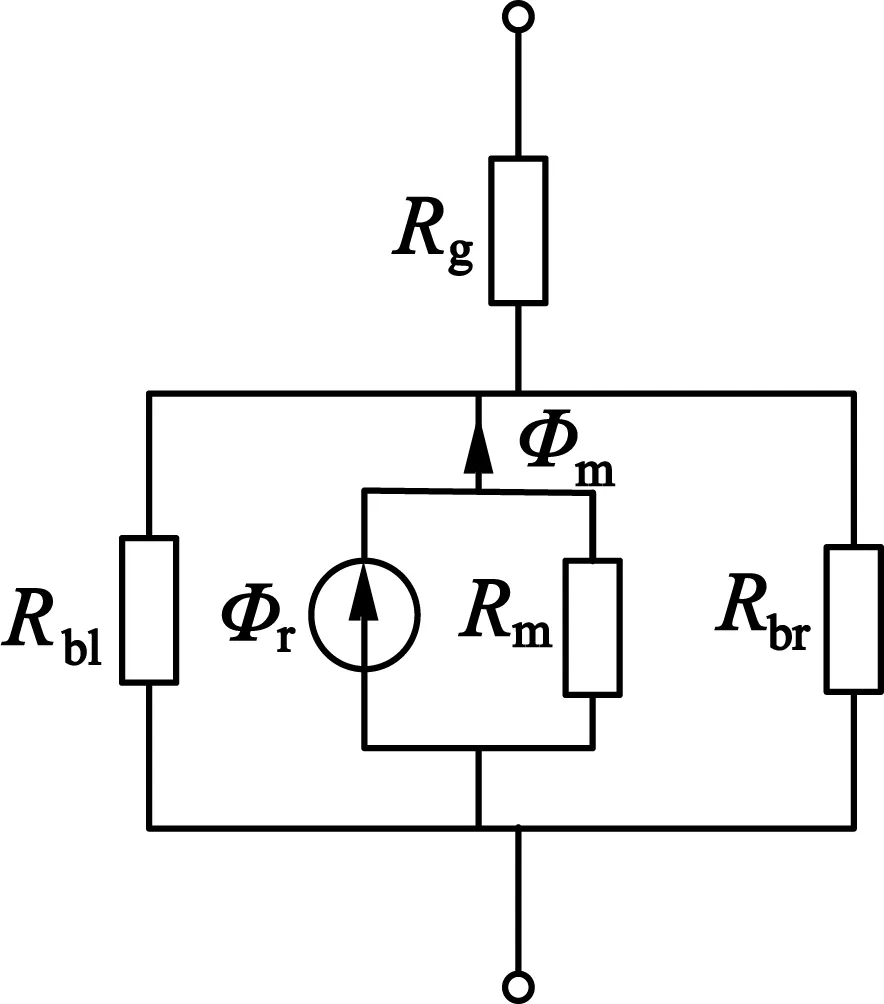
圖7中經過各層磁障的漏磁通φb1,φb2,φb3分別由所在的永磁體PM1,PM2,PM3所激勵,相應的漏磁阻為Rb1,Rb2,Rb3。圖9為PMaSynRM一個磁極單個磁障的截面圖和其等效電路。

圖8 一個磁極下氣隙磁場密度分布曲線

(a) 截面圖
(b) 等效電路

(c) 等效簡化電路
永磁體作為磁通源而產生磁場,形成磁路,而永磁體自身的磁阻Rm與磁源Φr相并聯,并有
Φr=BrwmLstk
(13)
(14)
式中:Br為永磁體剩磁密度;μr為相對磁導率,μr≈1。圖9(b)中永磁體PM的左邊磁障磁阻Rbl和右邊磁障磁阻Rbr在等效電路中相并聯,并聯后的等效磁阻可得出:
(15)
式中:磁障厚度tb與tm近似相等。
圖9(c)為其等效簡化電路,簡化后電路總磁阻:
(16)
由以上分析,可畫出圖7磁路的等效電路圖,如圖10(a)所示。Rs1,Rs2,Rs3和Rrotor分別是磁路經過定子磁軛和轉子磁軛的磁阻,一般情況下,定、轉子磁軛上的磁路沒有充分飽和,與氣隙磁阻Rg1,Rg2和Rg3相比較可以被忽略[11-13]。

(a) 等效電路圖

(b) 簡化電路圖
圖10(b)為其簡化電路,且Uri=ΦriRbmi,i=1,2,3。選取環路φ1~φ3,根據基爾霍夫電壓定律,有:

(17)
由式(17)可以較容易計算出φ1,φ2,φ3的值,進而從圖10(b)中可以得到φg1=φ1-φ2,φg2=φ2-φ3,φg3=φ3,因此通過式(11)、式(12)和φgi=BgiSgi可以相應地計算出Bg1=φg1/Sg1,Bg2=φg2/Sg2,Bg3=φg3/Sg3。
表1給出了PMaSynRM的參數設計。

表1 PMaSynRM設計參數
圖11為在轉子運動90°機械角度下(0~+α),采用解析法和有限元法得出的氣隙磁通密度分布和對比。有限元法分析時忽略定子開槽的影響,且可以看出轉子內磁障對應處氣隙磁場密度的抑制效果,可以理解為磁障為虛槽的影響,體現在圖中降低處,前提是磁障和轉子邊緣相距得足夠近。圖12為考慮定子槽的實際氣隙磁場密度分布,從圖12中可算出每層磁體對應的Bg1,Bg2,Bg3與圖11中對應的氣隙磁場密度結果近似,驗證了此分析的正確性。

圖11 氣隙磁場密度
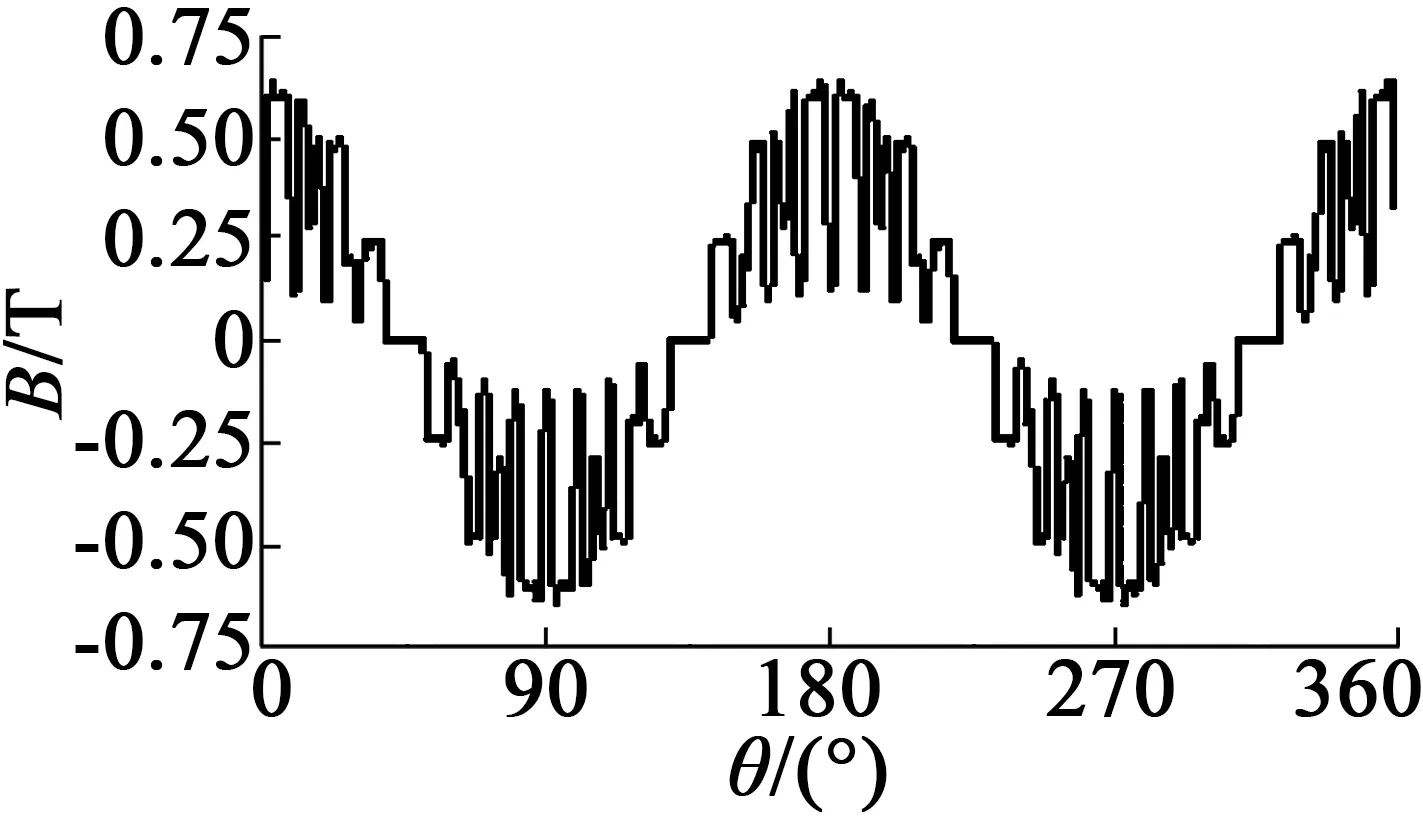
圖12 實際徑向氣隙
4 結 語
本文采用CAD繪圖工具,將所得模型導入Maxwell中仿真,分析了PMaSynRM負載下的轉矩質量與轉矩脈動,并擇以優化。隨后對PMaSynRM空載下的磁路進行分析,采用解析法,通過MATLAB仿真工具與有限元仿真,得出實驗結果相一致,從而驗證該方法的準確性。在目前有關奇異性轉子PMaSynRM的設計與研究資料較少的情況下,本文介紹和改進的設計方法對PMaSynRM的設計和研究有一定的參考作用。