四相電勵(lì)磁雙凸極電機(jī)靜止轉(zhuǎn)子位置檢測(cè)研究
2018-10-20 01:12:30史文斌馬成松
微特電機(jī) 2018年10期
趙 耀,邢 磊,潘 捷,史文斌,馬成松
(1.上海電力學(xué)院,上海 200090;2.上海東海風(fēng)力發(fā)電有限公司,上海 200433)
0 引 言
電勵(lì)磁雙凸極電機(jī)(以下簡稱DSEM)結(jié)合了永磁電機(jī)和開關(guān)磁阻電機(jī)的特點(diǎn),其定轉(zhuǎn)子上無永磁材料,僅靠勵(lì)磁電流調(diào)節(jié)磁場(chǎng),轉(zhuǎn)子上無繞組,結(jié)構(gòu)簡單,適用于航空航天等場(chǎng)合。DSEM基本特性和控制方法已經(jīng)得到了學(xué)者們的廣泛研究[1-8],其中包括轉(zhuǎn)矩脈動(dòng)抑制控制策略[2-3],本體結(jié)構(gòu)設(shè)計(jì)[4-6],容錯(cuò)結(jié)構(gòu)設(shè)計(jì)[7],鐵損研究[8]等。然而DSEM電動(dòng)或起動(dòng)發(fā)電運(yùn)行時(shí)位置傳感器的引入增加了系統(tǒng)的復(fù)雜程度,限制了電機(jī)的應(yīng)用范圍。無位置傳感器技術(shù)作為一種新穎的電機(jī)控制技術(shù)而被廣泛應(yīng)用于航空航天、工業(yè)信息等各個(gè)領(lǐng)域的研究中。它能夠提高電機(jī)系統(tǒng)的集成度,增強(qiáng)系統(tǒng)的高速性、適應(yīng)性、抗干擾性、可靠性,為電機(jī)在高速、高溫、強(qiáng)磁場(chǎng)等位置傳感器容易受到干擾的場(chǎng)合的應(yīng)用提供了選擇。因此,DSEM無位置傳感器技術(shù)的研究具有重要的理論和應(yīng)用價(jià)值。
目前,針對(duì)DSEM無位置傳感器技術(shù)的研究還處于起步階段,考慮到DSEM與開關(guān)磁阻電機(jī)的結(jié)構(gòu)類似,兩者的數(shù)學(xué)模型也較為接近,因而對(duì)開關(guān)磁阻電機(jī)初始位置檢測(cè)技術(shù)的研究具有借鑒價(jià)值。開關(guān)磁阻電機(jī)的三相電感隨轉(zhuǎn)子位置變化而變化,利用這一特點(diǎn),注入脈沖法得到了廣泛的研究[9-12]。然而開關(guān)磁阻電機(jī)各相獨(dú)立控制,且沒有勵(lì)磁繞組,電磁特性與DSEM不盡相同。DSEM同一時(shí)刻兩個(gè)繞組同時(shí)導(dǎo)通,現(xiàn)有的DSEM無位置傳感器技術(shù)的研究主要是根據(jù)串聯(lián)自感隨轉(zhuǎn)子位置變化而變化的規(guī)律而實(shí)現(xiàn)的。
文獻(xiàn)[13]首先在勵(lì)磁磁場(chǎng)建立階段判斷轉(zhuǎn)子位置區(qū)域,然后將勵(lì)磁繞組和電樞繞組間的互感線性化,通過互感矩形三角幾何關(guān)系判斷精確的轉(zhuǎn)子位置;也對(duì)起動(dòng)時(shí)第一個(gè)加速脈沖寬度做了理論分析,確保電機(jī)無遲滯起動(dòng)。文獻(xiàn)[14]提出了一種利用非導(dǎo)通相電壓和閾值之間的關(guān)系判斷換相點(diǎn),閾值通過換相點(diǎn)處勵(lì)磁反電動(dòng)勢(shì)特征來預(yù)先獲得;同時(shí)將換相信號(hào)提前一定角度來降低電機(jī)轉(zhuǎn)矩脈動(dòng)。該方法需要提前獲取電機(jī)電磁特性,但能夠?qū)o位置控制與傳統(tǒng)的提前角控制有機(jī)結(jié)合起來。文獻(xiàn)[15]對(duì)永磁雙凸極電機(jī)的初始位置檢測(cè)技術(shù)進(jìn)行了研究,通過定子繞組電感的特性完成位置判斷。文獻(xiàn)[17]提出了一種控制注入脈沖時(shí)間來完成電機(jī)加速和位置檢測(cè)雙重功能的電機(jī)起動(dòng)無位置法,該方法首先注入起動(dòng)脈沖,然后注入一小段檢測(cè)脈沖判斷換相位置,但該方法時(shí)間控制不好會(huì)導(dǎo)致電機(jī)振動(dòng)甚至起動(dòng)失敗。文獻(xiàn)[18]提出一種基于電機(jī)線電壓的無位置起動(dòng)法,該方法預(yù)先根據(jù)轉(zhuǎn)速和勵(lì)磁電流的大小設(shè)置換相點(diǎn)的線電壓閾值,將檢測(cè)到的線電壓與閾值比較判斷換相位置,該方法避免了中性點(diǎn)帶來的負(fù)面影響,容易實(shí)現(xiàn)。文獻(xiàn)[19]提出一種基于端電壓坐標(biāo)變換的電機(jī)無位置運(yùn)行法,該方法檢測(cè)三相電機(jī)端電壓經(jīng)過坐標(biāo)變換后,非導(dǎo)通相端電壓過零點(diǎn)即為電機(jī)換相點(diǎn)。
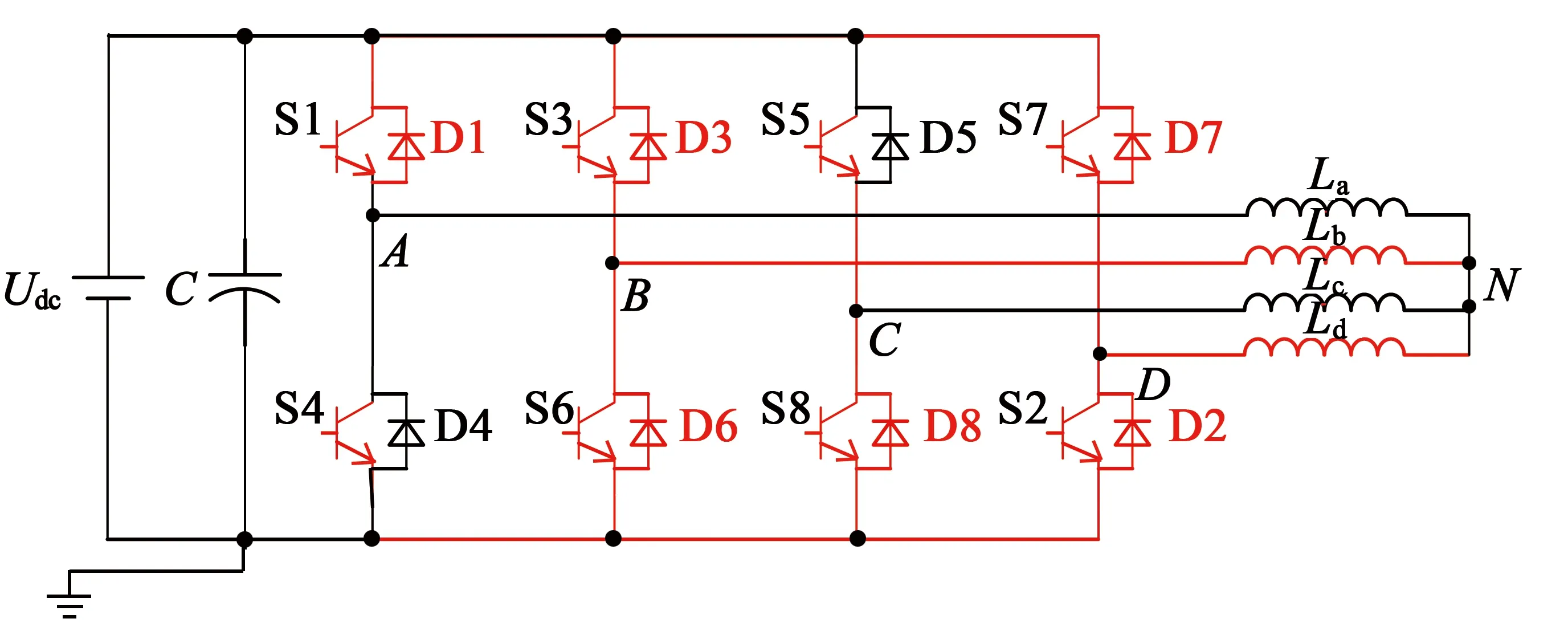
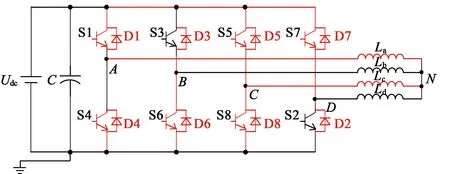
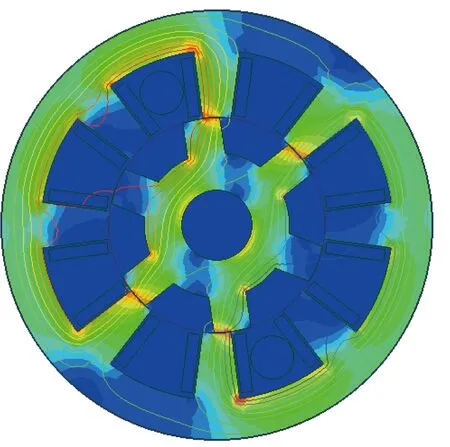
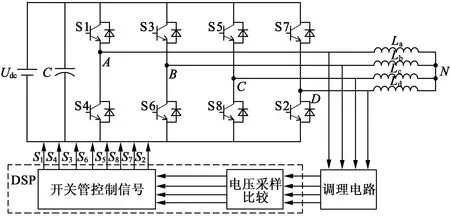
這些方法都有各自的應(yīng)用范圍,本文以8/6極DSEM為研究對(duì)象,如圖1所示,并以圖示的轉(zhuǎn)子位置作為0°電角度位置。采用四相全橋的驅(qū)動(dòng)電路,如圖2所示。
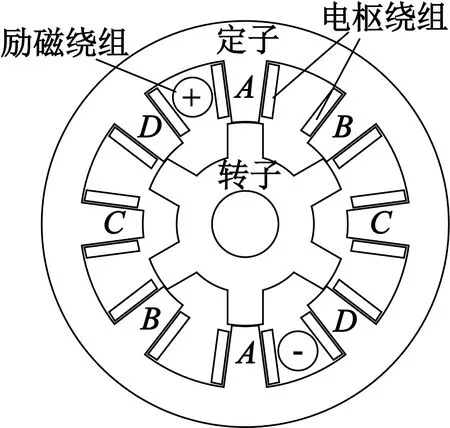
圖1四相DSEM截面圖
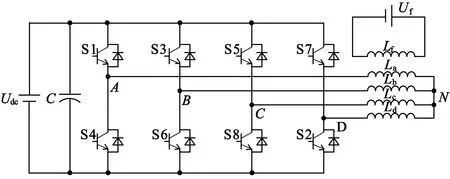
圖2四相全橋驅(qū)動(dòng)電路
針對(duì)電機(jī)靜止時(shí)初始位置判斷的問題,利用電機(jī)四相電樞繞組自感隨不同的轉(zhuǎn)子位置變化的原理,對(duì)注入脈沖檢測(cè)端電壓法進(jìn)行研究。在考慮勵(lì)磁繞組產(chǎn)生的齒槽轉(zhuǎn)矩影響的情況下,通過理論與實(shí)驗(yàn)分析了該方法的優(yōu)缺點(diǎn)。研究結(jié)果表明,該方法無需提前獲取電機(jī)電磁數(shù)據(jù),無需任何額外硬件資源,容易實(shí)現(xiàn),移植性和通用性強(qiáng)。
1 四相DSEM基本特性
四相DSEM的定轉(zhuǎn)子關(guān)系是8N/6N結(jié)構(gòu),其中8N代表定子極數(shù),6N代表轉(zhuǎn)子極數(shù),N是正整數(shù)。從圖1可以看出,其定子圓周上均勻分布8個(gè)定子極,定子極弧系數(shù)是1/3。與三相DSEM輸出相同功率時(shí),其電樞繞組電流密度較低,銅耗較小,有效材料質(zhì)量較小,功率密度較高,極數(shù)更多,輸出轉(zhuǎn)矩脈動(dòng)較小。同時(shí),本文所述電機(jī)適當(dāng)增加定子根部寬度,降低磁阻,增加功率。轉(zhuǎn)子極弧系數(shù)增加至1/3,漏磁增加,但磁鏈平頂效應(yīng)強(qiáng)于漏磁效應(yīng),輸出功率增加。磁鏈波形如圖3所示,A,D相靠近勵(lì)磁繞組,磁鏈最大值較B,C相大。

圖3四相DSEM磁鏈波形
電機(jī)自感:
(1)
式中:w是繞組匝數(shù);μr是相對(duì)磁導(dǎo)率;μ0是真空導(dǎo)磁系數(shù);S是磁路橫截面積;l是磁路長。
圖4是四相電樞繞組自感波形。可以看出,自感隨著轉(zhuǎn)子位置變化而周期性變化,每個(gè)45°電角度的區(qū)間內(nèi)四相自感都有固定的大小關(guān)系。而DSEM同一時(shí)刻有兩相繞組串聯(lián)工作,且中性點(diǎn)沒有引出,通過檢測(cè)端電壓能夠間接獲取各相繞組的大小關(guān)系。電機(jī)電樞繞組之間的互感波形如圖5所示,相鄰相互感MAB,MBC,MCD和MAD的絕對(duì)值較大,雖然同為相鄰相,但是A,D相間有勵(lì)磁繞組,極性相反,A,D相的互感值為正。非相鄰相互感MAC和MBD的絕對(duì)值較小,變化也較小。
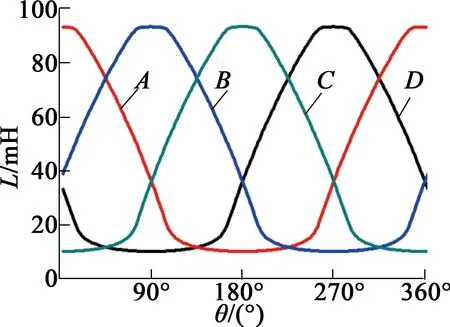
圖4四相DSEM自感波形
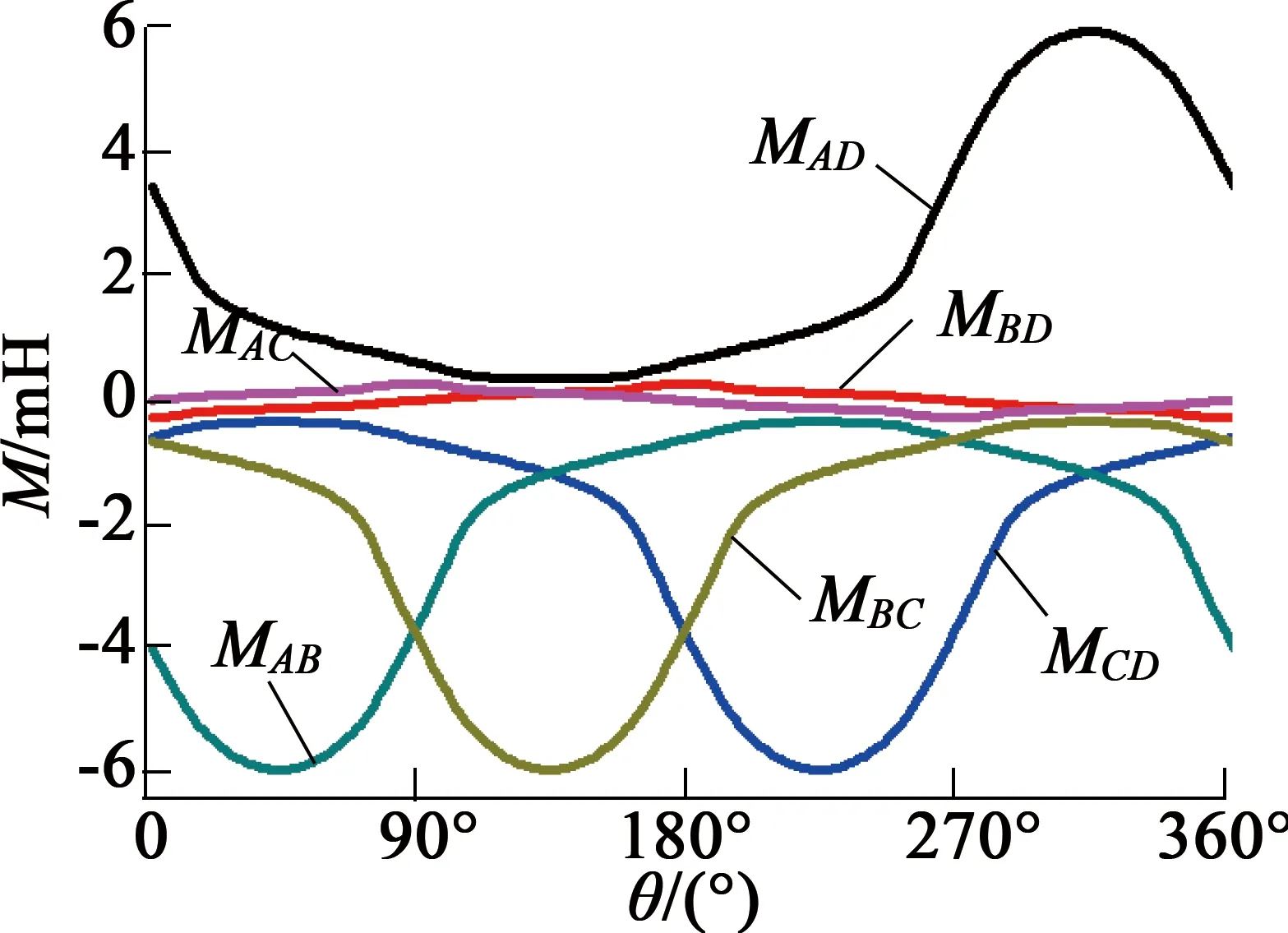
圖5四相DSEM互感波形
2 低壓開關(guān)脈沖檢測(cè)端電壓法
2.1 四相電機(jī)八狀態(tài)控制方式
傳統(tǒng)的三相電機(jī)更多地采用三相三狀態(tài)和三相六狀態(tài)的控制方式,三相九狀態(tài)的控制方式也有學(xué)者研究[2],研究表明三相六狀態(tài)和九狀態(tài)的控制方式可以有效抑制DSEM的轉(zhuǎn)矩脈動(dòng),提高輸出轉(zhuǎn)矩,減小母線反向電流,使電機(jī)平穩(wěn)運(yùn)行。因此四相電機(jī)采用八狀態(tài)的控制方式對(duì)于提高起動(dòng)轉(zhuǎn)矩,保證電機(jī)平穩(wěn)起動(dòng)具有重要意義。DSEM的主功率電路采用四相四橋臂拓?fù)洌南郉SEM的八狀態(tài)控制方式的各個(gè)開關(guān)管觸發(fā)狀態(tài)信號(hào)如圖6所示。可以看出,每個(gè)45°電角度將變換一次開關(guān)組合,初始位置判斷必須精確到45°的區(qū)間,為保證電機(jī)無遲滯起動(dòng),需要更加準(zhǔn)確確定轉(zhuǎn)子初試位置。下文將分三步來進(jìn)行轉(zhuǎn)子初始位置的判斷。本文所述的四相電機(jī)主要參數(shù)如表1所示。
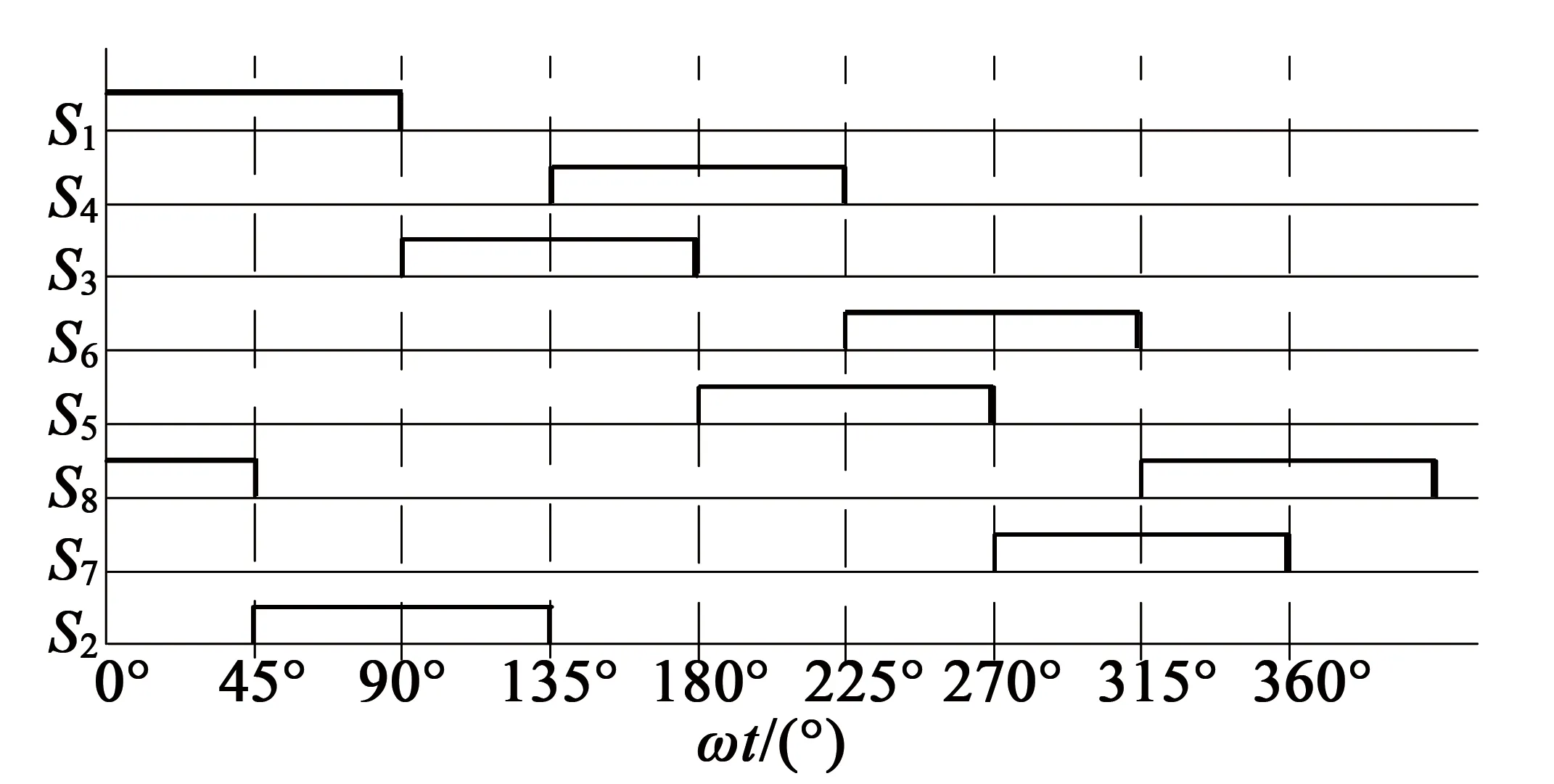
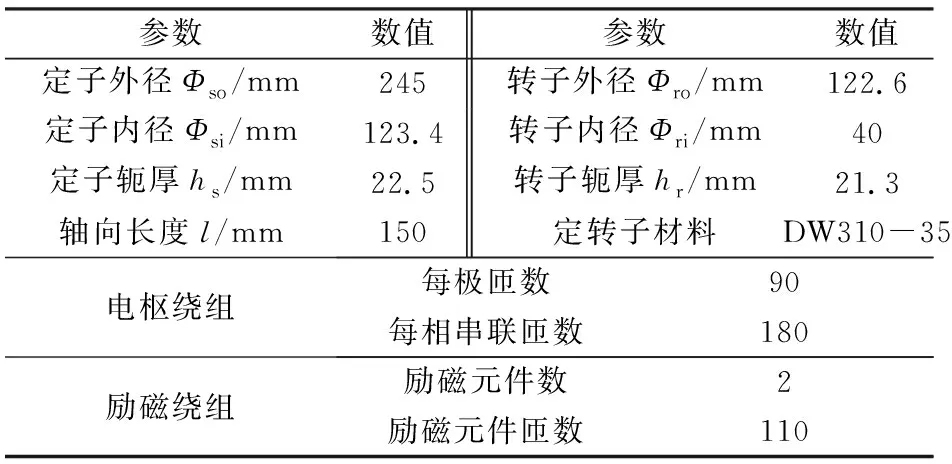
圖6 四相八狀態(tài)控制的開關(guān)管觸發(fā)信號(hào)
2.2 90°電角度區(qū)間判斷
初始時(shí)刻直流端接入5 V低壓直流電,S1和S8處于導(dǎo)通狀態(tài),此時(shí)電路通路狀態(tài)如圖7(a)所示,繞組A和C工作,等效電路方程:
式中:Udc是直流端電壓;R是繞組內(nèi)阻;iac(on)是繞組電流;La是A相繞組自感;Mac是A相與C相繞組互感。
繞組內(nèi)阻很小,A相與C相互感值也很小,可以忽略,式(2)簡化:
(3)
此時(shí)檢測(cè)非導(dǎo)通相D相端電壓,如圖8(a)所示,D相端電壓即為C相電樞繞組的電壓:
(4)
開關(guān)S1和S8處于關(guān)斷狀態(tài)時(shí),二極管D4和D5提供電流通路,等效電路狀態(tài)如圖7(b)所示,等效電路方程:
(5)
如圖8(b)所示,此時(shí)D相端電壓為A相電樞繞組的電壓:
(6)
式(4)與式(6)相減得:
(7)
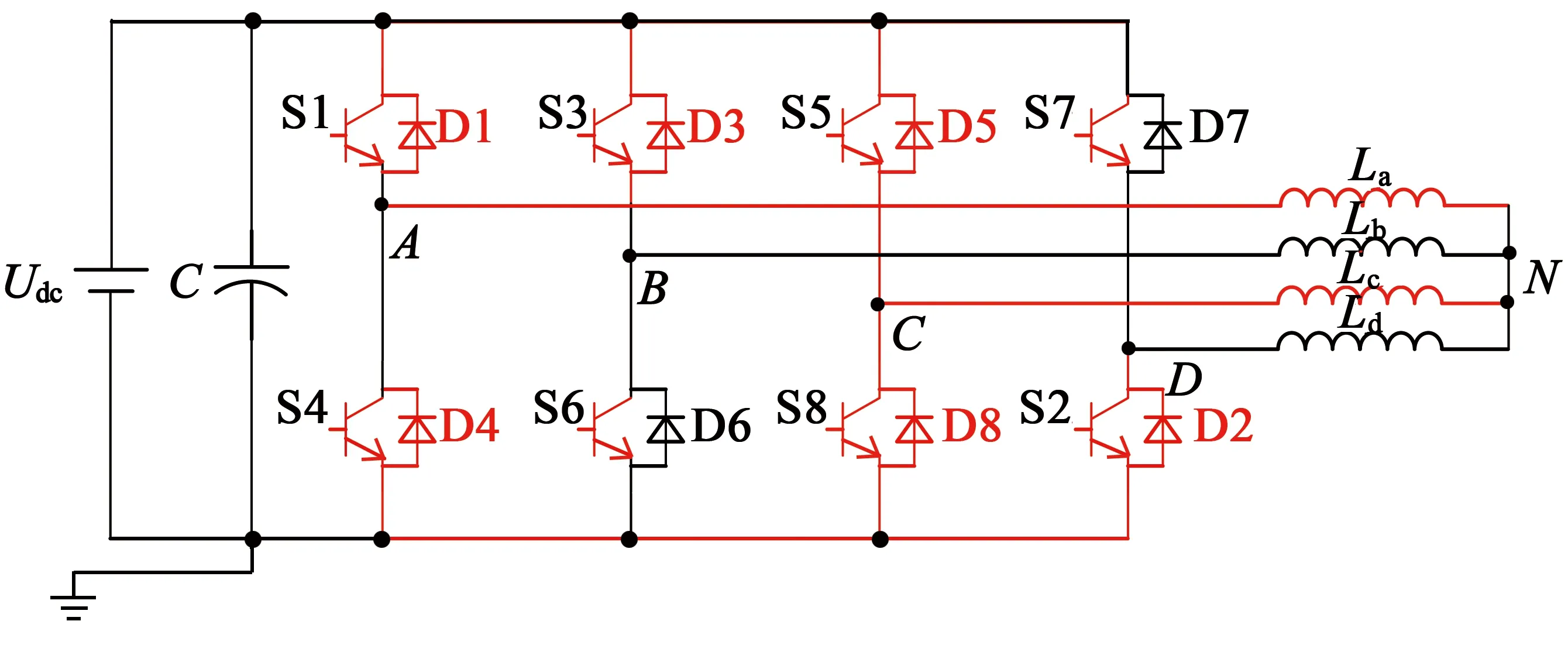
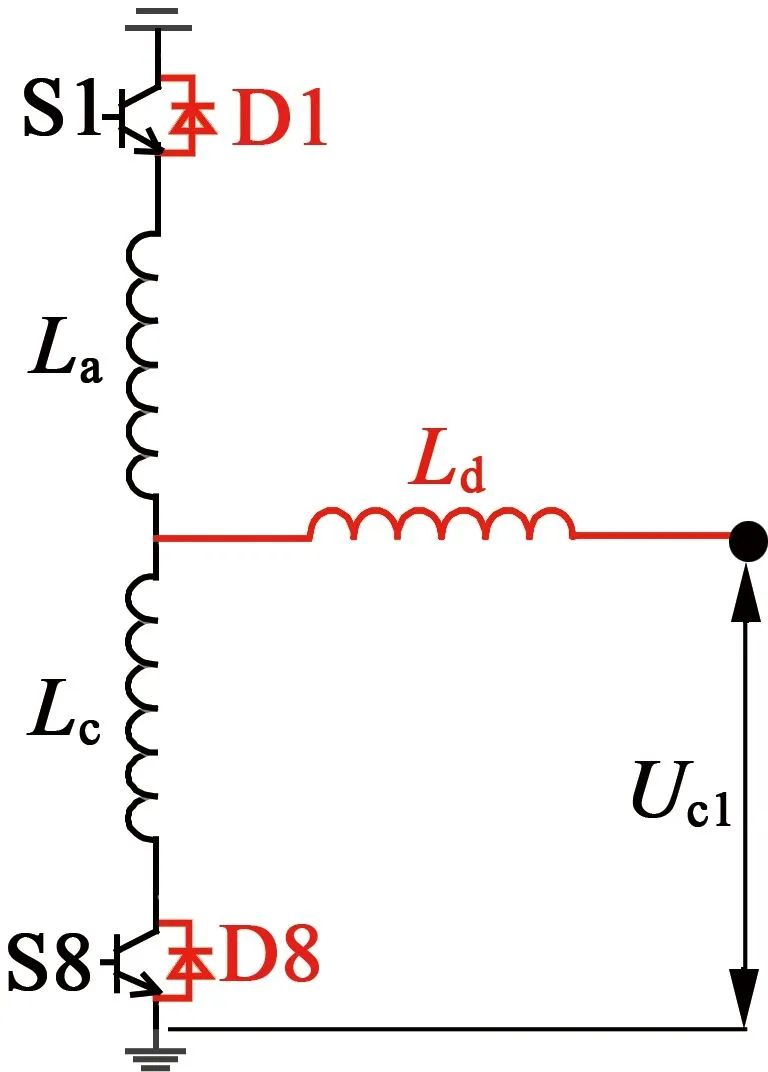
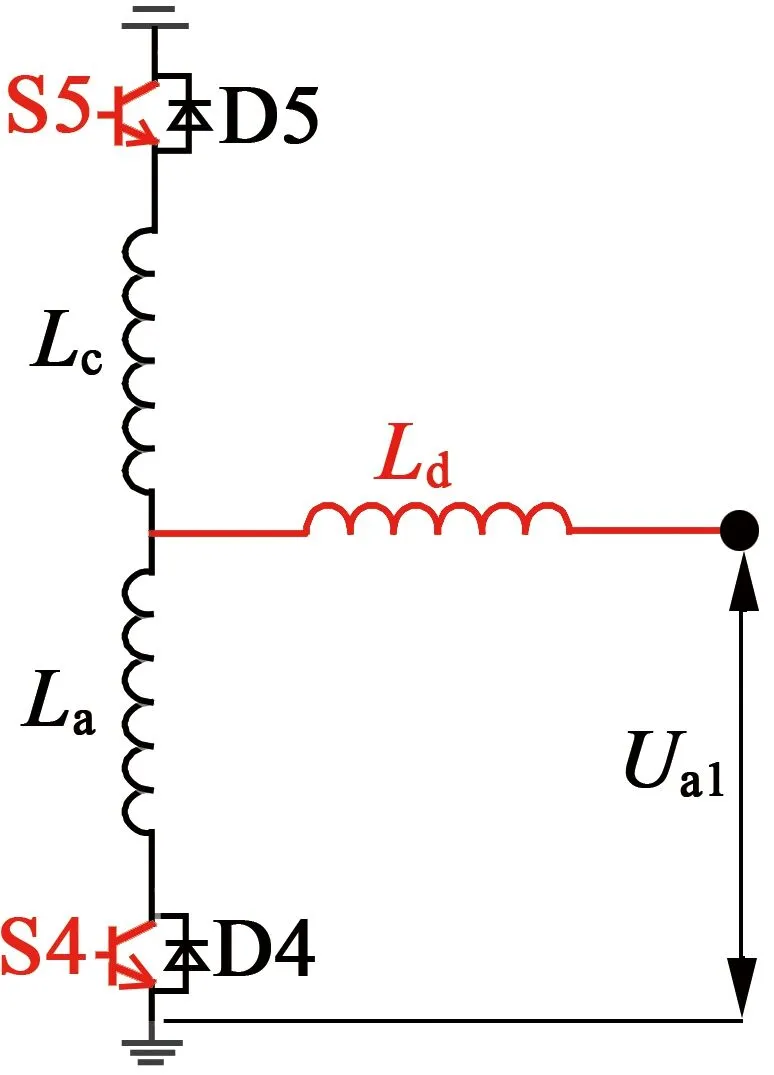
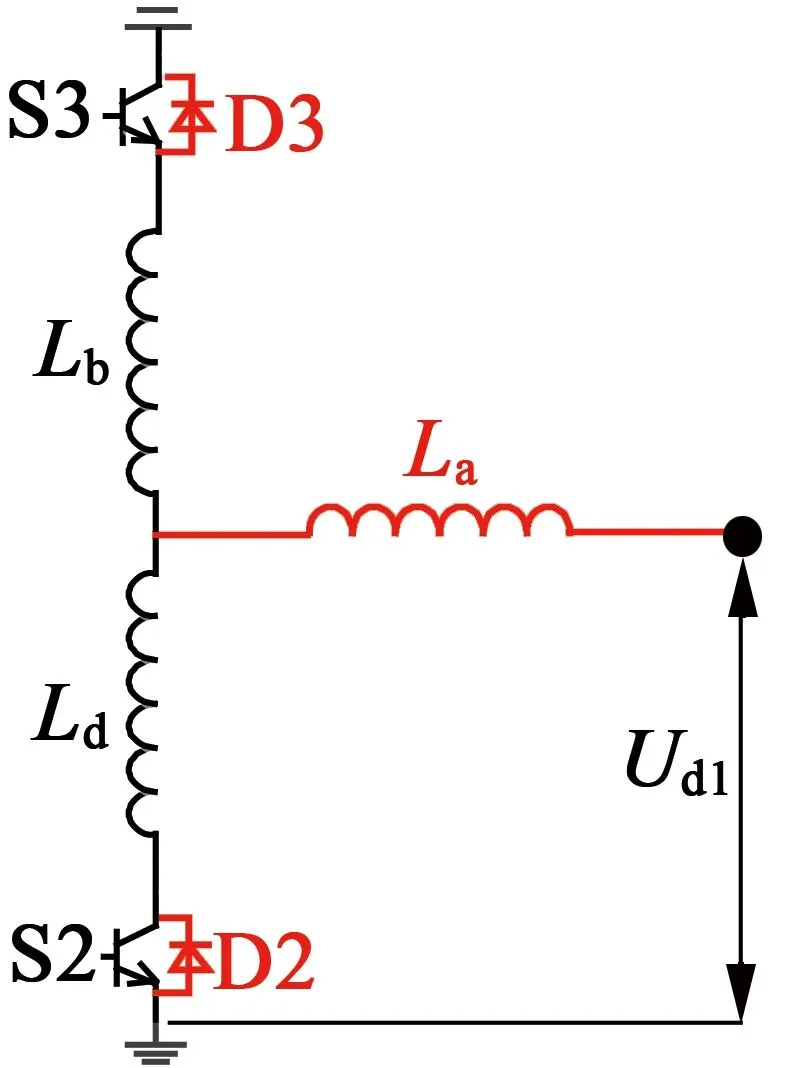
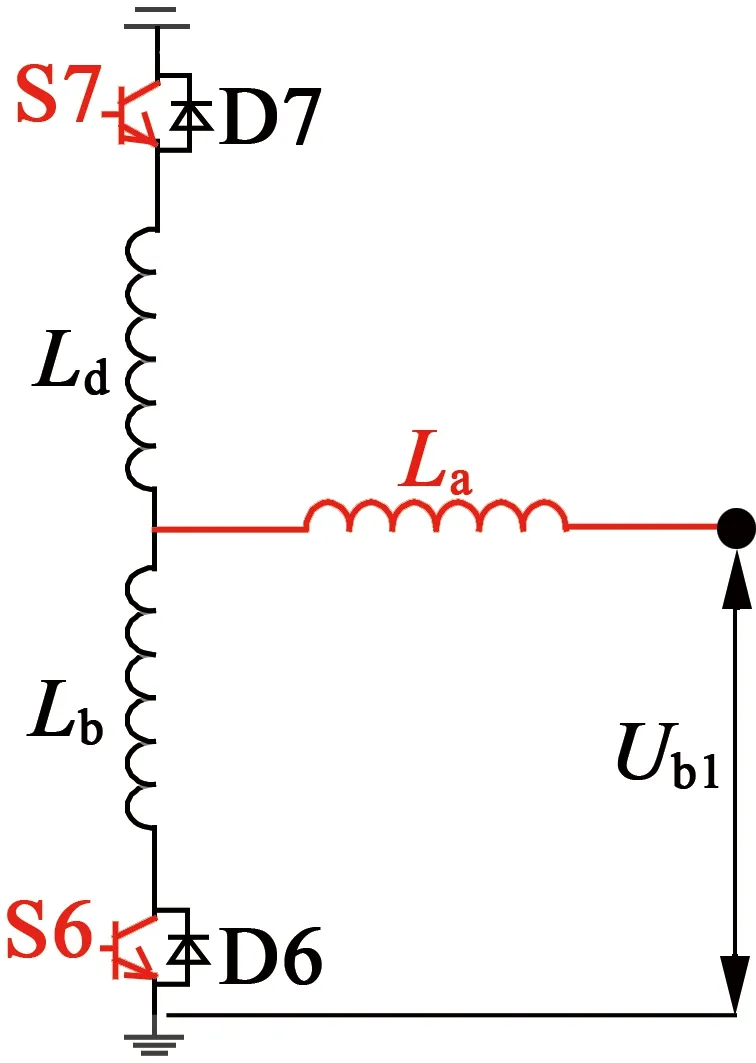
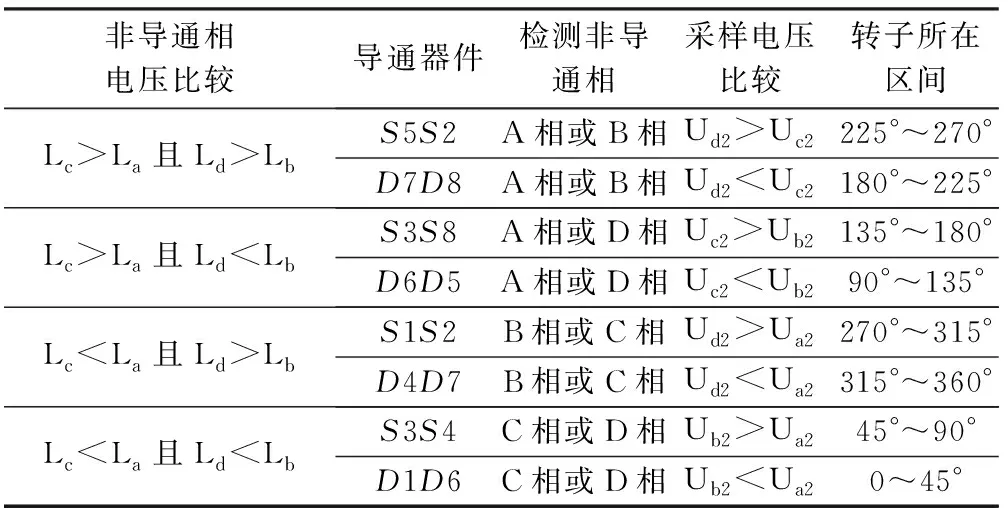
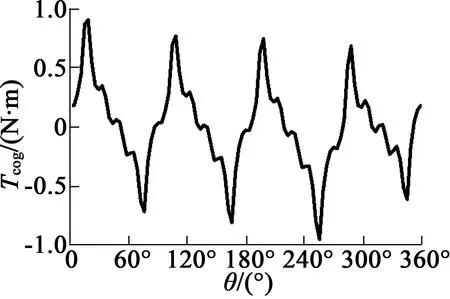
若ΔU1>0,則Lc>La,轉(zhuǎn)子位于90°~270°電角度區(qū)間;若ΔU<0,則Lc 給S3和S2管開通信號(hào),導(dǎo)通B,D兩相,此時(shí)根據(jù)等效電路圖7(c)可知,D相電樞繞組的電壓可由A相端電壓表示。續(xù)流階段電流通過D6和D7的并聯(lián)二極管續(xù)流,如圖7(d)所示,此時(shí)A相端電壓是B相電樞繞組的電壓。端電壓如圖8(c)和圖8(d)所示。導(dǎo)通和續(xù)流階段A相電壓差: (a) S1,S8導(dǎo)通 (b) D4,D5續(xù)流 (c) S3,S2導(dǎo)通 (d) D6,D7續(xù)流 圖7兩種開關(guān)組合導(dǎo)通和續(xù)流電路圖 (8) 若ΔU2>0,則Ld>Lb,轉(zhuǎn)子位于180°~360°電角度區(qū)間;若ΔU2<0,則Ld (a) S1,S8導(dǎo)通 (b) D4,D5續(xù)流 (c) S3,S2導(dǎo)通 (d) D6,D7續(xù)流 圖8兩種開關(guān)組合導(dǎo)通和續(xù)流端電壓 表2 90°區(qū)間判斷狀態(tài) 當(dāng)完成第一步區(qū)間判斷后,需要進(jìn)行45°區(qū)間判斷。若第一步判斷在180°~270°區(qū)間,需要通過C,D兩相自感作進(jìn)一步判斷。與第一步類似,首先導(dǎo)通S5和S2管,檢測(cè)A相或B相端電壓,得到D相繞組兩端電壓Ud2,D7和D8兩管續(xù)流時(shí),得到C相繞組兩端電壓Uc2。 (9) 若Ud2>Uc2,則轉(zhuǎn)子位于225°~270°區(qū)間;反之轉(zhuǎn)子位于180°~225°區(qū)間。轉(zhuǎn)子位置與端電壓的關(guān)系如表3所示。 表3 45°區(qū)間判斷狀態(tài) DSEM的凸極結(jié)構(gòu)與勵(lì)磁線圈感應(yīng)的磁場(chǎng)作用產(chǎn)生電磁力,當(dāng)電機(jī)起動(dòng)時(shí)勵(lì)磁繞組通入電流,電磁力吸引轉(zhuǎn)子至平衡位置的齒槽轉(zhuǎn)矩。空載或輕載運(yùn)行時(shí),無論加入勵(lì)磁電流之前轉(zhuǎn)子是否在平衡位置都會(huì)在齒槽轉(zhuǎn)矩的作用下到達(dá)平衡位置,這一特性為準(zhǔn)確判斷初始轉(zhuǎn)子位置奠定了基礎(chǔ)。不同勵(lì)磁電流下,在一個(gè)電周期內(nèi)齒槽轉(zhuǎn)矩隨轉(zhuǎn)子位置不同而變化的關(guān)系如圖9所示。橫軸的正方向是轉(zhuǎn)子旋轉(zhuǎn)的方向,同時(shí)也對(duì)應(yīng)正的齒槽轉(zhuǎn)矩。齒槽轉(zhuǎn)矩的最大值與勵(lì)磁電流以及電機(jī)結(jié)構(gòu)有關(guān)。如圖10(a)所示,當(dāng)轉(zhuǎn)子位于105°機(jī)械角度時(shí)電機(jī)磁力線路徑最長,此時(shí)齒槽轉(zhuǎn)矩最大。如圖10(b)所示,當(dāng)轉(zhuǎn)子位于50°機(jī)械角度時(shí)電機(jī)磁力線路徑最短,齒槽轉(zhuǎn)矩為0。當(dāng)摩擦力矩忽略時(shí),空載時(shí)電機(jī)轉(zhuǎn)子所處的齒槽轉(zhuǎn)矩為0的位置有8個(gè),但在85°,185°,282°和355°這4個(gè)位置,轉(zhuǎn)子很容易受到正或負(fù)轉(zhuǎn)矩的影響而發(fā)生轉(zhuǎn)動(dòng),這些不是穩(wěn)定平衡位置。通過對(duì)齒槽轉(zhuǎn)矩為0時(shí)轉(zhuǎn)子位置的理論分析,可以在初始位置檢測(cè)方法所得到的轉(zhuǎn)子區(qū)域基礎(chǔ)上進(jìn)一步獲得更加準(zhǔn)確的轉(zhuǎn)子位置。 圖9齒槽轉(zhuǎn)矩與轉(zhuǎn)子位置間的關(guān)系 (a) 最大轉(zhuǎn)矩 (b) 最小轉(zhuǎn)矩 圖10最大最小轉(zhuǎn)矩對(duì)應(yīng)的轉(zhuǎn)子位置 電機(jī)靜止時(shí),未加勵(lì)磁電流,但開通時(shí)間過長仍然會(huì)引起電機(jī)轉(zhuǎn)動(dòng)。因此需要對(duì)脈沖注入時(shí)間進(jìn)行計(jì)算。以A,C相導(dǎo)通為例,忽略電感飽和效應(yīng),繞組電流產(chǎn)生的電磁轉(zhuǎn)矩: (10) 式中:i是繞組電流。由式(3)得到相電流: (11) 式中:Δt是開通時(shí)間,根據(jù)仿真波形可知,電感斜率: (12) 式中:Lmax和Lmin分別是A,C兩相繞組自感之和的最大值和最小值;θs是定子極弧度數(shù)。 要保持電機(jī)靜止,需要滿足電磁轉(zhuǎn)矩小于負(fù)載轉(zhuǎn)矩。可得最長激勵(lì)時(shí)間: (13) 式中:T0是負(fù)載轉(zhuǎn)矩。最短激勵(lì)時(shí)間應(yīng)該保證端電壓達(dá)到穩(wěn)定時(shí)刻即可。 上文所述方法關(guān)斷A,C相后,為避免干擾,需要等續(xù)流電流降為0后才能開通B,D相,選擇合適的開關(guān)頻率非常重要。A,C相與B,D相分別開通關(guān)斷時(shí),開關(guān)時(shí)間短,兩相自感之和近似恒定,兩種通斷方式都可以等效為電感和電阻串聯(lián)的一階電路,以A,C相導(dǎo)通為例,其響應(yīng)時(shí)間: (14) 電流上升時(shí)間: (15) 式中:imax是相電流最大值。電流下降時(shí)間: (16) 由式(15)和式(16)相減得: (17) 上升時(shí)間大于下降時(shí)間,故施加脈沖的頻率: (18) 可以看出,A,C相自感之和最大時(shí),脈沖頻率最大值最小。A,C相與B,D相是輪流導(dǎo)通的,開關(guān)頻率: (19) 式中:(La+Lc)max是A,C相自感之和最大值;imax(Δtmax)是最長導(dǎo)通時(shí)間的電流最大值。 為了驗(yàn)證本文的電機(jī)轉(zhuǎn)子初始位置檢測(cè)方法的可行性,在一個(gè)8/6結(jié)構(gòu)的DSEM控制平臺(tái)上進(jìn)行實(shí)驗(yàn),如圖11所示。其中樣機(jī)是一臺(tái)8/6結(jié)構(gòu)的四相DSEM,控制器采用以TMS320F2812為核心的控制系統(tǒng),功率電路采用四相全橋以及Concept公司的驅(qū)動(dòng)器。其他所有的算法均在DSP驅(qū)動(dòng)器中實(shí)現(xiàn),無多余硬件。 圖11硬件實(shí)驗(yàn)平臺(tái) 本實(shí)驗(yàn)的控制系統(tǒng)框圖如圖12所示,采樣的端電壓經(jīng)過調(diào)理電路和比較器后輸出開關(guān)控制信號(hào)。開關(guān)頻率3.2kHz,直流端電壓是5V。如圖13所示,Uq1,Uq2,Uq3分別代表S1S8,S2S3,S3S4的驅(qū)動(dòng)信號(hào),Us代表位置檢測(cè)電壓信號(hào)。首先分別給S1和S8開關(guān)信號(hào),導(dǎo)通A,C相,開通和關(guān)斷時(shí)分別檢測(cè)D相端電壓,可見開通時(shí)D相端電壓小于關(guān)斷時(shí)電壓,可以判斷La>Lc。其次給S3和S2開關(guān)信號(hào),導(dǎo)通B,D相,開通和關(guān)斷時(shí)分別檢測(cè)C相端電壓,可見開通時(shí)C相端電壓小于關(guān)斷時(shí)電壓,可以判斷Lb>Ld。根據(jù)表2可知,轉(zhuǎn)子位于0°~90°區(qū)間。此時(shí)可以給S3和S4開關(guān)信號(hào),導(dǎo)通A,B相,通過開通和關(guān)斷時(shí)分別檢測(cè)C相端電壓,判斷La和Lb的大小,如圖14所示,開通時(shí)C相端電壓小于關(guān)斷時(shí)電壓,即La 圖12控制系統(tǒng)框圖 圖1390°區(qū)間判斷實(shí)驗(yàn)波形 圖1445°區(qū)間判斷實(shí)驗(yàn)波形 本文對(duì)一種用于四相DSEM初試位置檢測(cè)方法進(jìn)行研究,研究結(jié)果表明: 1)四相DSEM的各相自感波形相互間的大小關(guān)系每間隔45°電角度發(fā)生一次變化,各相之間的互感值較小,可以忽略不計(jì)。端電壓法根據(jù)三相自感隨轉(zhuǎn)子位置的變化規(guī)律,通過開關(guān)管開通和關(guān)閉時(shí)端電壓差值判斷轉(zhuǎn)子位置。 2)本方法僅需要三次變換開關(guān)狀態(tài)即可判斷轉(zhuǎn)子45°電角度區(qū)間位置,電機(jī)起動(dòng)前加入的勵(lì)磁電流能夠產(chǎn)生定位力矩,定位力矩的峰值點(diǎn)對(duì)應(yīng)著磁力線經(jīng)過磁路最長的轉(zhuǎn)子位置,平衡點(diǎn)對(duì)應(yīng)著磁力線經(jīng)過磁路最短的轉(zhuǎn)子位置,因此通過定位力矩能夠進(jìn)一步準(zhǔn)確的判斷轉(zhuǎn)子位置 3)這種方法充分利用了DSEM本身的特性,無需增加額外的硬件資源,無需提前獲取電機(jī)的電磁特性,算法簡單可靠,容易實(shí)現(xiàn),具有可移植性和實(shí)用價(jià)值。

2.3 45°電角度區(qū)間判斷
2.4 齒槽轉(zhuǎn)矩分析

2.5 脈沖注入?yún)?shù)分析

3 實(shí)驗(yàn)驗(yàn)證
3.1 實(shí)驗(yàn)平臺(tái)

3.2 實(shí)驗(yàn)結(jié)果分析


4 結(jié) 語