復(fù)雜邊界下大渦模擬的格子Boltzmann并行方法
2018-10-24 08:34:02宋安平劉智翔
計(jì)算機(jī)應(yīng)用與軟件 2018年10期
徐 磊 宋安平 劉智翔 張 武
1(上海大學(xué)計(jì)算機(jī)工程與計(jì)算科學(xué)學(xué)院 上海 200444)2(上海海洋大學(xué)信息學(xué)院 上海 201306)
0 引 言
格子Boltzmann方法LBM是介于流體的微觀分子動(dòng)力學(xué)模型和宏觀連續(xù)模型之間的介觀模型。由于Boltzmann方程自身的運(yùn)動(dòng)學(xué)特性,以及可以根據(jù)經(jīng)典的Chapman-Enskog展開(kāi)從LBM得到Navier-Stokes方程,使得LBM比基于連續(xù)介質(zhì)假設(shè)的Navier-Stokes方程包含了更多的物理內(nèi)涵。目前,LBM已經(jīng)應(yīng)用在了很多流體問(wèn)題(多項(xiàng)流、湍流、多孔介質(zhì)以及微尺度流等)中[1-4]。LBM將流體視為比分子大,但在宏觀上無(wú)限小的一系列粒子。這些粒子按照一定物理規(guī)律在網(wǎng)格上進(jìn)行演化計(jì)算,通過(guò)對(duì)反映粒子狀態(tài)的分布函數(shù)進(jìn)行統(tǒng)計(jì)平均求得宏觀物理量。
文獻(xiàn)[5-6]首先分別提出了單松弛時(shí)間格子Boltzmann模型SRT-LBM(Single-Relaxation-Time LBM)和格子BGK模型LBGK(Lattice Bhatnagar-Gross-Krook)。它們采用單一松弛時(shí)間系數(shù),計(jì)算效率得到極大提高。盡管SRT-LBM已經(jīng)被成功地應(yīng)用于模擬各種流體問(wèn)題,但是該模型仍然存在缺點(diǎn):當(dāng)無(wú)量綱松弛時(shí)間過(guò)于趨近0.5時(shí),模型會(huì)產(chǎn)生數(shù)值不穩(wěn)定導(dǎo)致程序發(fā)散。針對(duì)這一問(wèn)題,D′Humiéres[7]提出了廣義格子Boltzmann模型GLBE(Generalized Lattice Boltzmann Equation),或稱為多松弛格子Boltzmann模型MRT-LBM(Multiple-Relaxation-Time LBM)。2000年-2002年間,文獻(xiàn)[8-10]對(duì)該模型對(duì)該模型二維和三維的物理原理、參數(shù)選取、數(shù)值穩(wěn)定性和計(jì)算效率等方面進(jìn)行了詳細(xì)的理論分析,表明了MRT-LBM的穩(wěn)定性和精確性都要優(yōu)于SRT-LBM。
相對(duì)于SRT-LBM,MRT-LBM穩(wěn)定性更高,但是并未克服松馳時(shí)間趨近于0.5時(shí)計(jì)算不穩(wěn)定導(dǎo)致程序發(fā)散的問(wèn)題。隨著雷諾數(shù)的增大,MRT-LBM和SRT-LBM雖然都可通過(guò)增加網(wǎng)格數(shù)保持計(jì)算穩(wěn)定,但是當(dāng)雷諾數(shù)更大時(shí),利用SRT-LBM和MRT-LBM直接數(shù)值模擬流場(chǎng)全部動(dòng)態(tài)信息所需要的內(nèi)存和求解時(shí)間非常巨大[11]。為了在模擬湍流場(chǎng)時(shí)節(jié)省計(jì)算耗費(fèi)并在有限的計(jì)算機(jī)硬件條件下盡可能完整地給出瞬時(shí)流場(chǎng)信息,可在格子Boltzmann模型中引入大渦模擬技術(shù)LES(Large Eddy Simulation)[12]。Hou等[13-14]通過(guò)非平衡粒子分布函數(shù)的二階矩計(jì)算了應(yīng)變率張量,從而將Smagorinsky渦粘性模型引入SRT-LBM中。而Kxafczyk等[15]則利用傳遞矩陣將粒子分布函數(shù)的二階矩從速度空間傳遞到矩空間計(jì)算禍粘性系數(shù),將Smagorinsky渦粘性模型與D3Q15 MRT-LBM組合。文獻(xiàn)[16-17]通過(guò)Chapman-Enskog分析推導(dǎo)應(yīng)變率張量,分別將Smagroinsky模型引入到D3Q19 MRT-LBM和包含外力項(xiàng)的D3Q19 MRT-LBM中,得到MRT-LBM-LES(MRT-LBM with LES)模型。
如今,計(jì)算流體力學(xué)研究對(duì)象的規(guī)模和復(fù)雜程度向更大更深的方向發(fā)展,單個(gè)計(jì)算節(jié)點(diǎn)不能滿足計(jì)算需求,需要借助于高性能計(jì)算機(jī)滿足計(jì)算的需要。大規(guī)模并行計(jì)算在一定程度上可以解決計(jì)算需要和超級(jí)計(jì)算性能之間的矛盾。LBM中格點(diǎn)演化主要分為碰撞和遷移兩個(gè)過(guò)程,碰撞是各個(gè)格點(diǎn)獨(dú)自同時(shí)進(jìn)行的,只與格點(diǎn)自身相關(guān)。遷移時(shí)格點(diǎn)上的粒子也只是與離它們最近格點(diǎn)上的粒子進(jìn)行信息交換,所以LBM非常適合并行計(jì)算。諸多研究人員對(duì)LBM的并行性能進(jìn)行了研究,設(shè)計(jì)了高可擴(kuò)展高效率的并行算法。Pan等[19]在不同并行計(jì)算平臺(tái)比較區(qū)域劃分方法的性能,利用D3Q15模型模擬了單向和多項(xiàng)流在多孔介質(zhì)中的流動(dòng)情況。Wu等[20]對(duì)高雷諾數(shù)二維方腔流,采用域分解方法對(duì)D2Q9 MRT-LBM和SRT-LBM進(jìn)行了比較。Velivelli等[21]利用CPU緩存的優(yōu)勢(shì),將計(jì)算區(qū)域分塊循環(huán)計(jì)算,加快了計(jì)算速度。Schepke等[22]采用塊劃分策略對(duì)SRT-LBM進(jìn)行了并行性能的分析,該方法使得每個(gè)進(jìn)程都分配到整個(gè)計(jì)算區(qū)域中的一個(gè)子計(jì)算區(qū)域,各個(gè)子計(jì)算區(qū)域與相鄰的子計(jì)算區(qū)域進(jìn)行數(shù)據(jù)的傳遞。文獻(xiàn)[23]針對(duì)多孔介質(zhì)內(nèi)流體流動(dòng)提出了負(fù)載均衡策略減少計(jì)算時(shí)間。本文主要研究了MRT-LBM引入Smagorinsky渦粘性模型后在大規(guī)模并行計(jì)算機(jī)上的并行性能。
1 MRT-LBM-LES以及邊界條件
1.1 MRT-LBM-LES
MRT-LBM將速度空間的碰撞通過(guò)線性變換轉(zhuǎn)化為矩空間的碰撞,使得作用后得到的量具有物理意義。在矩空間完成碰撞后,再進(jìn)行逆變換到速度空間,進(jìn)行遷移的過(guò)程。MRT-LBM的碰撞過(guò)程是在矩空間中進(jìn)行的,它的演化方程為:
f(x+ciδt,t+δt)-f(x,t)=-M-1S[m(x,t)-meq(x,t)]
(1)
式中:f(x,t)是粒子分布函數(shù),M是變換矩陣,m(x,t)=Mf(x,t)是矩空間的粒子分布函數(shù),meq(x,t)是矩空間的平衡態(tài)分布函數(shù)。S是松弛對(duì)角陣,并且S對(duì)角線各項(xiàng)滿足0≤Si<2。
式(1)可以分為碰撞和遷移兩個(gè)過(guò)程:
f(x,t)=f(x,t)-M-1S[m(x,t)-meq(x,t)]
(2)
f(x+ciδt,t+δt)=f(x,t)
(3)
常用的二維LBM模型為D2Q9(如圖1所示)。它的離散速度為:

(4)
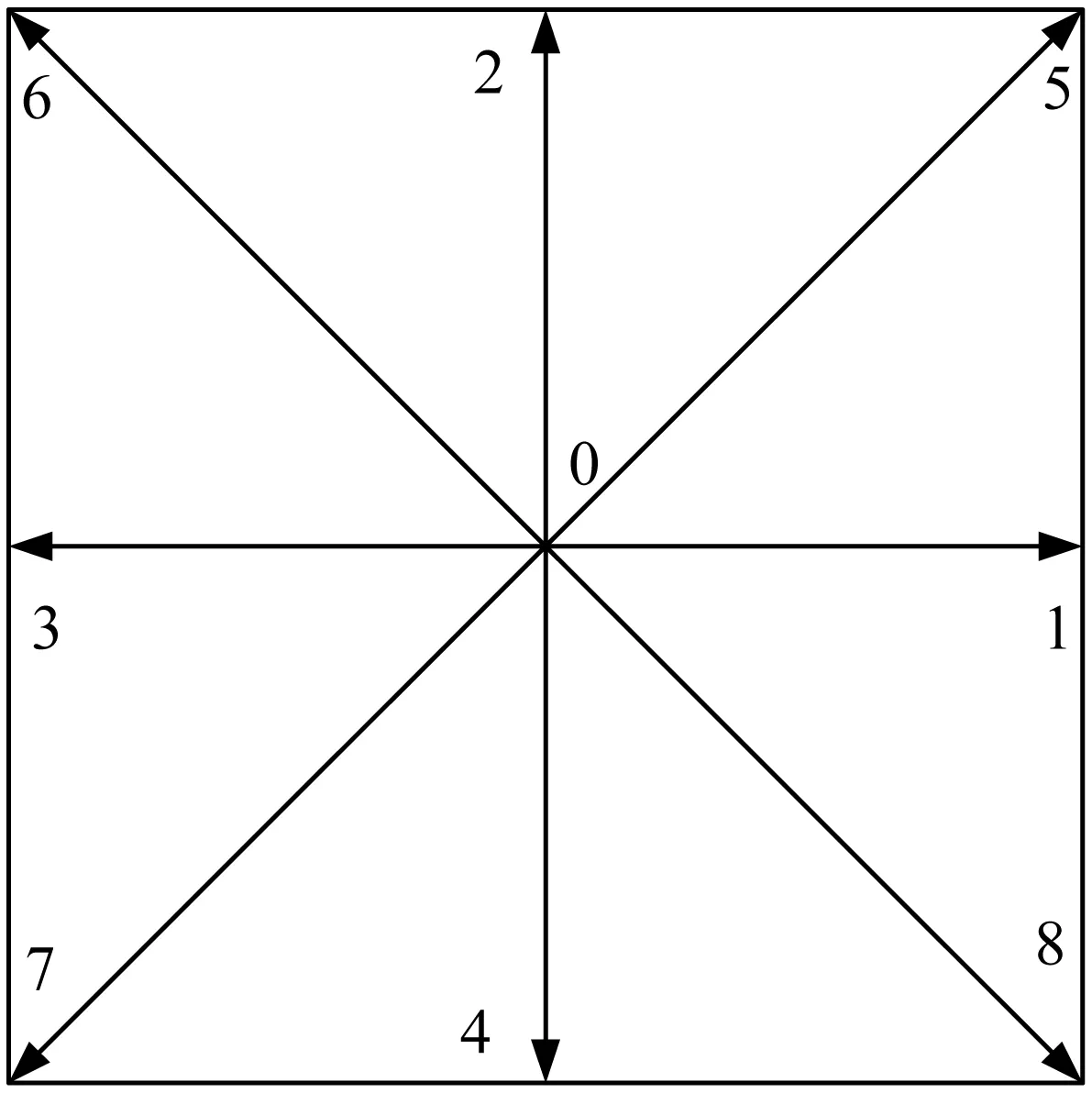
圖1 D2Q9
平衡態(tài)分布函數(shù):
(5)
(6)
D2Q9對(duì)應(yīng)的變換矩陣:
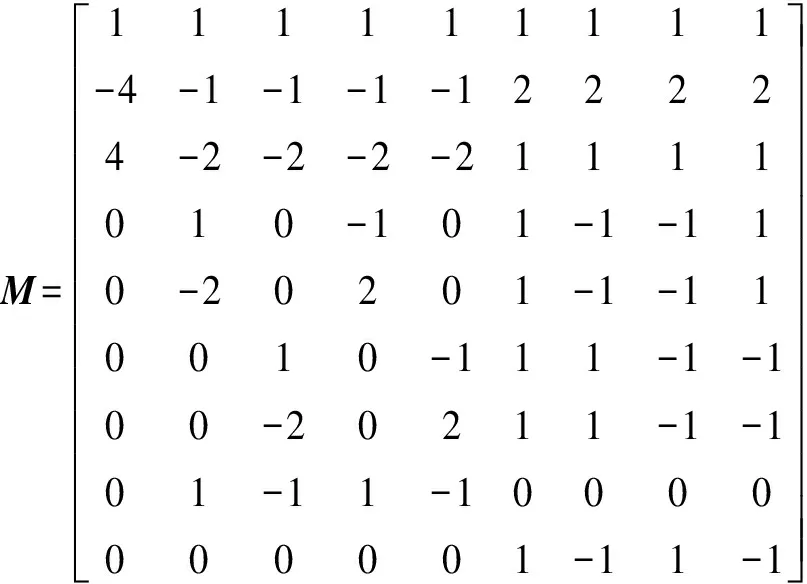
(7)
矩空間的平衡態(tài)分布函數(shù)meq為:
meq=ρ(1,-2+3u2,α+βu2,ux,-ux,uy,-uy,
(8)
式中:α和β為自由參數(shù),ρ為密度,u為速度。松弛矩陣diag(0,se,sε,0,sq,0,sq,sv,sv)。剪切粘性和體粘性系數(shù)分別為:
(9)
(10)
宏觀量為:
ρ=∑fi
(11)
(12)
為了能夠模擬湍流,Hou等[13]將Smagroinsky模型引入到D2Q9中。在引入的Smagorinsky模型中,無(wú)量綱的運(yùn)動(dòng)粘性系數(shù)v由分子運(yùn)動(dòng)粘性v0和渦粘性vt組成:
υ=v0+vt
(13)
式中:vt由應(yīng)變率張量Sαβ,參數(shù)Cs以及格子步長(zhǎng)δx決定,其表達(dá)式如下:
vt=(Csδx)2|Sαβ|
(14)
1.2 邊界條件
在處理曲面復(fù)雜邊界時(shí),如果使用平直邊界的邊界處理方法,精度較低。為此,Yu等[24]提出了一種曲面邊界的處理方法。如圖2所示,實(shí)心圓表示固體點(diǎn),空心圓表示流場(chǎng)點(diǎn),曲線表示實(shí)際的物理邊界,它將流場(chǎng)分為固體點(diǎn)和流場(chǎng)點(diǎn),方格點(diǎn)為邊界節(jié)點(diǎn)。

圖2 曲面邊界
這里將流場(chǎng)點(diǎn)記為xf,固體點(diǎn)記為xb,與xf相鄰的流場(chǎng)點(diǎn)記為xff,邊界點(diǎn)記為xw。則流場(chǎng)點(diǎn)xf的分布函數(shù)為:
(15)
(16)
對(duì)于平直邊界,本文采用Guo等[25]提出的非平衡態(tài)外推方法。
2 格子類(lèi)型的判斷
當(dāng)流場(chǎng)中物體存在復(fù)雜邊界時(shí),需要判斷物體附近格子點(diǎn)的類(lèi)型,通過(guò)不同類(lèi)型的格子點(diǎn)計(jì)算出物體邊界處的格子點(diǎn)粒子分布函數(shù)。本文通過(guò)射線法判斷格子的類(lèi)型。從待判斷點(diǎn)的某一個(gè)方向引射線,計(jì)算和物體邊界的交點(diǎn)個(gè)數(shù),通過(guò)交點(diǎn)個(gè)數(shù)的奇偶性得到格子點(diǎn)的類(lèi)型。本文使用圓柱和Rae2822翼型為例判斷格子點(diǎn)的類(lèi)型,如圖3和圖4所示。該方法可以準(zhǔn)確的判斷出圓柱和翼型流場(chǎng)中的格子類(lèi)型。

圖3 圓的格子類(lèi)型(包括固體點(diǎn)和邊界點(diǎn))

圖4 Rae2822翼型的格子類(lèi)型(包括固體點(diǎn)和邊界點(diǎn))
3 并行策略
對(duì)于二維問(wèn)題,流場(chǎng)可以沿著一個(gè)方向或兩個(gè)方向進(jìn)行劃分。當(dāng)并行環(huán)境中核數(shù)增多時(shí),沿著一個(gè)方向進(jìn)行劃分并不符合實(shí)際問(wèn)題的需要,所以本文選擇沿著兩個(gè)方向?qū)α鲌?chǎng)進(jìn)行劃分。在進(jìn)行并行處理時(shí),每個(gè)MPI進(jìn)程負(fù)責(zé)處理一個(gè)流場(chǎng)的子區(qū)域,每個(gè)子區(qū)域用一個(gè)二元組(i,j)標(biāo)記。進(jìn)程總數(shù)記為n。二元組可以通過(guò)下式獲得:
i=mod(n,nx)
(17)
(18)
式中:nx為沿著x方向的劃分?jǐn)?shù)。每個(gè)子區(qū)域的范圍為:
(19)
(20)
式中:nLx是x方向格子點(diǎn)數(shù),xmin是子區(qū)域的起始格點(diǎn)位置,xmax是子區(qū)域的結(jié)束格點(diǎn)位置。子區(qū)域在y方向的范圍可以類(lèi)似計(jì)算得到。


圖5 進(jìn)程(i,j)傳遞部分?jǐn)?shù)據(jù)給進(jìn)程(i+1,j)

圖6 流場(chǎng)中各個(gè)子區(qū)域信息傳遞
4 數(shù)值實(shí)驗(yàn)
4.1 數(shù)值驗(yàn)證
為了驗(yàn)證本文并行算法的正確性,我們使用圓柱和翼型在流場(chǎng)中的情況分別進(jìn)行了測(cè)試。流場(chǎng)的速度為U=0.115 5。圖7中,(a)和(b)是圓柱繞流雷諾數(shù)Re=20和40時(shí)的流線圖,從圖中可以看出,在圓柱后產(chǎn)生了一對(duì)對(duì)稱的渦,隨著雷諾數(shù)的增大,渦也在逐漸變大。(c)和(d)是雷諾數(shù)Re=100和150時(shí)的流線圖,圓柱后方兩側(cè)的渦隨著雷諾數(shù)的增大開(kāi)始出現(xiàn)震蕩,當(dāng)超過(guò)臨界值時(shí),圓柱后的渦逐漸分離,形成周期性交替脫落、旋轉(zhuǎn)方向相反的非對(duì)稱渦[26]。
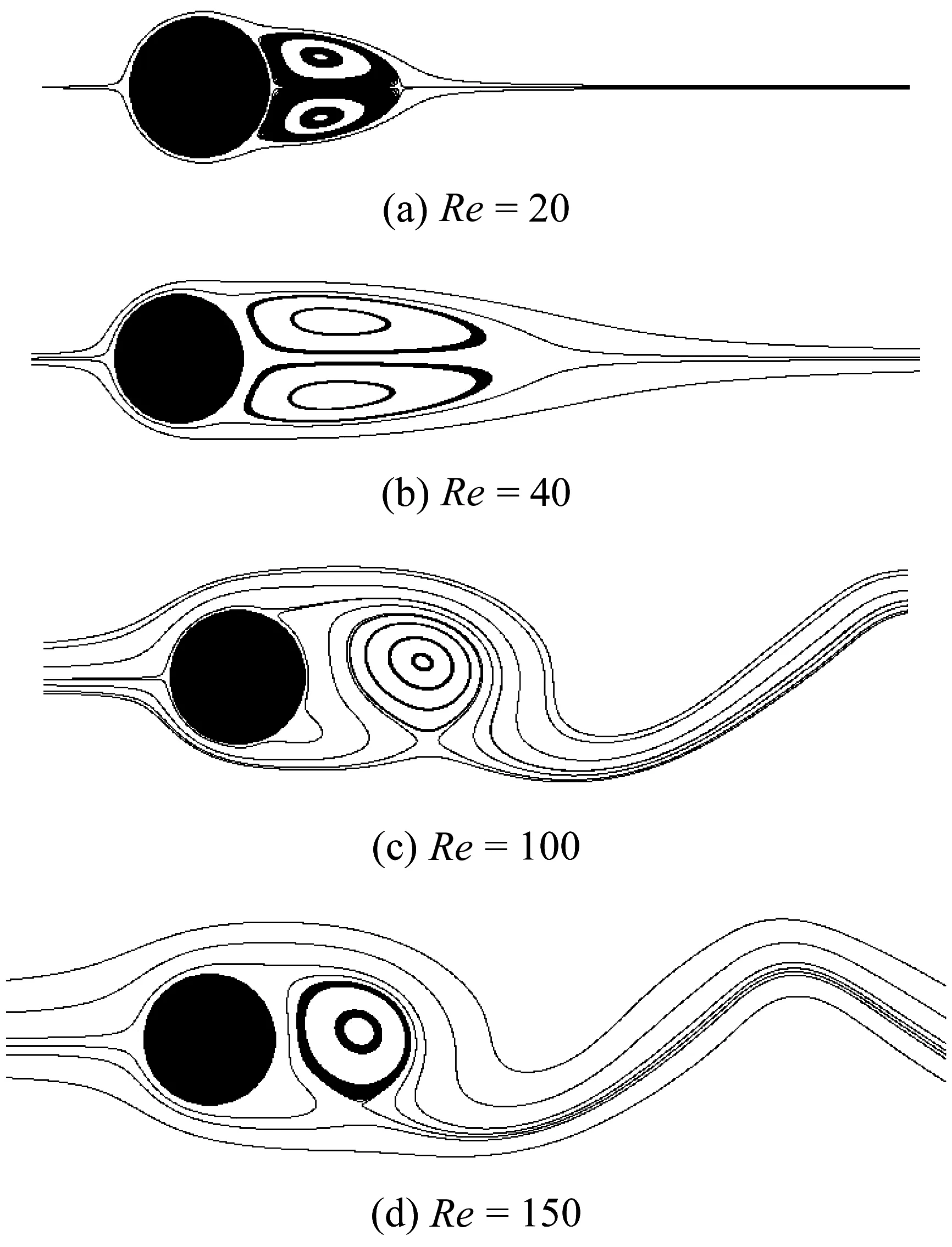
圖7 圓柱繞流流線圖
圖8中的(a)和(b)是翼型繞流雷諾數(shù)Re=100 000時(shí)的流線圖,(a)的攻角為0°,(b)的攻角為3°。可以看出,實(shí)驗(yàn)結(jié)果與文獻(xiàn)[27]一致。
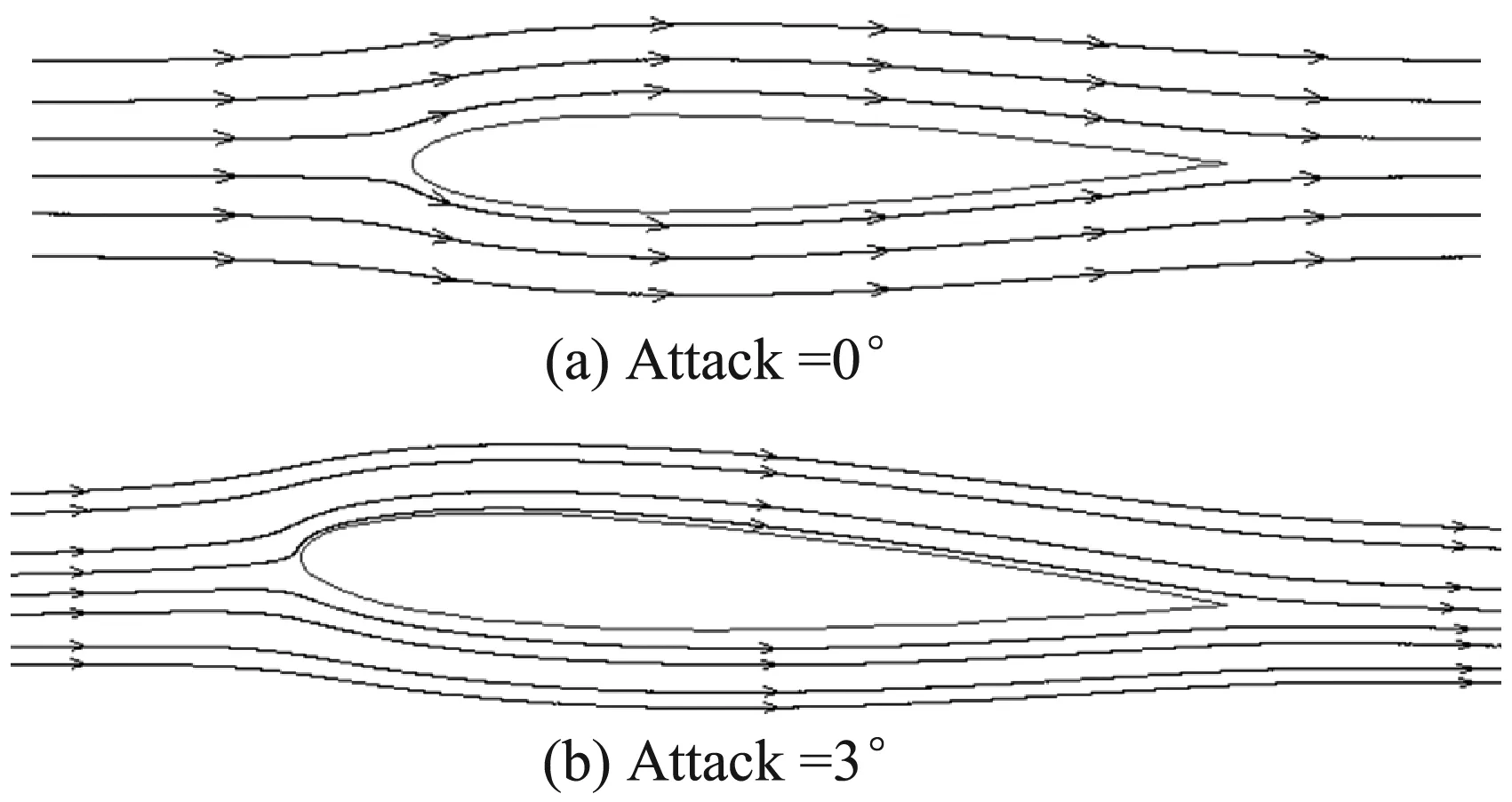
圖8 翼型繞流渦量圖
4.2 效率驗(yàn)證
本節(jié)基于128核集群進(jìn)行并行性能的測(cè)試,該集群包含1個(gè)登錄節(jié)點(diǎn)、8個(gè)計(jì)算節(jié)點(diǎn),每個(gè)節(jié)點(diǎn)有16個(gè)核,配置了兩塊2×Intel Xeon E5-2660 CPU。每個(gè)節(jié)點(diǎn)的內(nèi)存為128 GB。節(jié)點(diǎn)之間通過(guò)56 GB Infiniband線連接。
為了統(tǒng)計(jì)程序運(yùn)行時(shí)間,進(jìn)行了500步迭代。采用了1 000×1 000和1 500×1 500兩種格子規(guī)模進(jìn)行了加速比和效率的測(cè)試,比較了兩種不同規(guī)模下的加速比和效率。
分別在核數(shù)為8、16、32、64以及128核上進(jìn)行了時(shí)間的統(tǒng)計(jì)。圖9為兩種不同格子規(guī)模下加速比的比較,圓形為格子規(guī)模1 500×1 500的加速比,正方形為格子規(guī)模1 000×1 000的加速比,黑色直線為理想加速比。可以看出,兩種格子規(guī)模的加速比都呈直線上升,格子規(guī)模較大的加速比要略高。由于進(jìn)程之間需要進(jìn)行邊界上格子信息的通信,加速比要低于理想加速比。因?yàn)檫M(jìn)程間的通信量只發(fā)生在相鄰進(jìn)程間,并沒(méi)有大規(guī)模的主從式通信,所以加速比基本為直線。
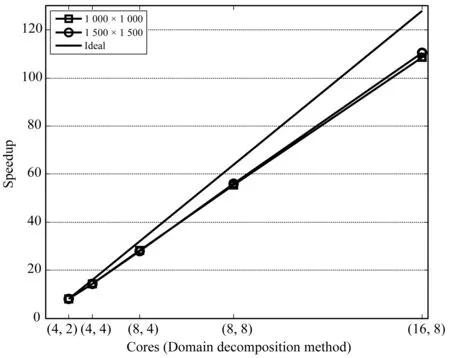
圖9 加速比
圖10為兩種不同規(guī)模下效率的比較,圓形為格子規(guī)模1 500×1 500的效率,正方形為格子規(guī)模1 000×1 000的效率。可以看出,兩種格子規(guī)模的效率都在緩慢下降,隨著核數(shù)的增加,格子規(guī)模較大的效率下降趨勢(shì)更為緩慢,當(dāng)核數(shù)達(dá)到128核時(shí),計(jì)算效率可以達(dá)到86.5%。從圖9和圖10可以看出,我們所實(shí)現(xiàn)的并行算法有良好的可擴(kuò)展性。

圖10 效率
5 結(jié) 語(yǔ)
本文提出了一種高可擴(kuò)展的格子Boltzmann方法。該方法可以有效判斷格子類(lèi)型,模擬高雷諾數(shù)下流場(chǎng)中的湍流,采用雙向的區(qū)域分解方法,并設(shè)計(jì)了詳細(xì)的劃分策略以及數(shù)據(jù)交換策略,大大降低了通信量,減少了通信時(shí)間。數(shù)值結(jié)果表明,該算法具有良好的可擴(kuò)展性,效率可以在128個(gè)核心上達(dá)到86.5%。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
甘肅教育(2020年14期)2020-09-11 07:57:42
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
中國(guó)科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
電測(cè)與儀表(2015年5期)2015-04-09 11:30:52
時(shí)代英語(yǔ)·高二(2015年1期)2015-03-16 00:08:11
中國(guó)衛(wèi)生(2014年11期)2014-11-12 13:11:32
