基于凸優(yōu)化的擴(kuò)展手眼標(biāo)定算法
2018-10-24 07:46:22智向陽renSchwertfeger
電子設(shè)計(jì)工程 2018年20期
智向陽 ,S?ren Schwertfeger
(1.中國科學(xué)院微系統(tǒng)與信息技術(shù)研究所,上海200050;2.上海科技大學(xué)信息科學(xué)與技術(shù)學(xué)院,上海201210;3.中國科學(xué)院大學(xué)北京100049)
標(biāo)定對(duì)于一個(gè)機(jī)器人系統(tǒng)來說非常關(guān)鍵。一般的,如果有兩個(gè)不同的參考坐標(biāo)系,如相機(jī)、激光雷達(dá)或者機(jī)械臂末端,需要計(jì)算這些參考坐標(biāo)系之間的變換關(guān)系。通常在機(jī)械臂抓取任務(wù)中,一個(gè)相機(jī)(眼)會(huì)被固定在機(jī)械臂末端(手),以幫助確定待抓取物體的位姿。假設(shè)已經(jīng)通過相機(jī)確定了物體的在相機(jī)坐標(biāo)系的位姿,為了確定物體在機(jī)械臂末端坐標(biāo)系下的位姿,需要標(biāo)定出相機(jī)坐標(biāo)系到機(jī)械臂末端坐標(biāo)系的變換。
此類問題在過去幾十年內(nèi)被廣泛研究,被統(tǒng)稱為手眼標(biāo)定。早期的方法是將手眼標(biāo)定分成兩個(gè)部分:旋轉(zhuǎn)標(biāo)定和平移標(biāo)定[1-2]。它們首先標(biāo)定出旋轉(zhuǎn),接著用標(biāo)定出的旋轉(zhuǎn)來求解平移。然而,這種兩步式算法必然會(huì)導(dǎo)致旋轉(zhuǎn)標(biāo)定的誤差傳遞到平移標(biāo)定中去,所以接著出現(xiàn)了同時(shí)進(jìn)行旋轉(zhuǎn)和平移標(biāo)定的算法[3-4]。近幾年,基于迭代優(yōu)化的算法[5-6]被提出,這些算法的誤差相比來說更小,但計(jì)算復(fù)雜度往往更高。
傳統(tǒng)手眼標(biāo)定算法假定相機(jī)和機(jī)械臂末端在同一尺度下,也就是說相機(jī)位姿需要已知物體,如棋盤格[7],來確定。然而,自然場景中往往不存在或者不方便制作這樣一個(gè)物體,所以相機(jī)位置一般由SFM確定,此時(shí)相機(jī)位置是相對(duì)的。這種情況下,傳統(tǒng)的手眼標(biāo)定算法無法使用,但是由于機(jī)械臂末端的位姿的尺度已知,相機(jī)與末端的坐標(biāo)變換關(guān)系仍然可以標(biāo)定出。這種算法一般稱為擴(kuò)展手眼標(biāo)定算法。
首次提出擴(kuò)展手眼標(biāo)定的定義并提出算法的是Andreff等人[8]。Andreff等人推導(dǎo)出手眼標(biāo)定的一種線性化公式,該公式是文獻(xiàn)[7]和本文算法的基礎(chǔ)。Andreff等人建議分開求解旋轉(zhuǎn)和平移,但如前文所述,這樣必然會(huì)導(dǎo)致旋轉(zhuǎn)誤差傳播到平移標(biāo)定中去。通過分別擴(kuò)展基礎(chǔ)等式和包含尺度因子的雙四元數(shù)等式,Schmidt等人提出兩種非線性優(yōu)化方法[9]。然而,非線性優(yōu)化需要一個(gè)好的初始化,否則可能會(huì)陷入局部最小值。Heller等人首先利用Park等人[2]的方法來估計(jì)旋轉(zhuǎn),接著利用二階錐規(guī)劃估計(jì)平移[10]。這是第一篇嘗試用凸優(yōu)化方法解決擴(kuò)展手眼標(biāo)定問題的論文,但顯然,這種方法仍然存在誤差傳播問題。文獻(xiàn)[11]提出一種將擴(kuò)展手眼標(biāo)定融合進(jìn)三維重建過程的算法,該算法不僅提高了標(biāo)定及重建速度,且精度非常高,是目前最先進(jìn)的擴(kuò)展手眼標(biāo)定方法。
事實(shí)上,手眼標(biāo)定并不局限于標(biāo)定相機(jī)和機(jī)械臂末端。只要兩個(gè)設(shè)備固定在一起且能夠估計(jì)出多組合適的運(yùn)動(dòng),則兩個(gè)設(shè)備坐標(biāo)系之間的變換關(guān)系就可以被標(biāo)定出來。最近幾年,傳統(tǒng)手眼標(biāo)定和擴(kuò)展手眼標(biāo)定也出現(xiàn)在其他標(biāo)定領(lǐng)域。Esquivel和Koch利用手眼標(biāo)定算法標(biāo)定視野無重疊的多相機(jī)系統(tǒng)[12]。文獻(xiàn)[13]則利用手眼標(biāo)定算法標(biāo)定四足機(jī)器人的足與相機(jī)的相對(duì)姿態(tài)。
文中將凸優(yōu)化應(yīng)用到擴(kuò)展手眼標(biāo)定。凸優(yōu)化是優(yōu)化的子領(lǐng)域之一,凸的性質(zhì)保證了任意局部最小值必然是全局最小值,所以無需初始化。
1 問題描述
不同于相機(jī)標(biāo)定,手眼標(biāo)定無需待標(biāo)定的兩個(gè)坐標(biāo)系下有對(duì)應(yīng)的特征點(diǎn),相反地,手眼標(biāo)定利用多組齊次變換對(duì),即{A1,A2,…,An}和{ }B1,B2,…,Bn。如圖1所示,Ai和Bi分別表示相機(jī)運(yùn)動(dòng)的變換和機(jī)械臂末端運(yùn)動(dòng)的變換。X代表待解的從機(jī)械臂末端坐標(biāo)系到相機(jī)坐標(biāo)系的變換。通過簡單計(jì)算可知,A,B和X之間滿足如下關(guān)系:


圖1 手眼標(biāo)定示意圖
一般的,相機(jī)運(yùn)動(dòng)變換可以通過特殊的物體,如棋盤格,或者SFM求解得出。但是由于沒有參考,SFM無法確定絕對(duì)尺度,也就是說SFM估計(jì)出的相機(jī)位移包含一個(gè)未知尺度因子。與此同時(shí),機(jī)械臂末端的位姿可以通過標(biāo)定好的機(jī)械臂模型和運(yùn)動(dòng)學(xué)計(jì)算。
公式(1)可以分解成旋轉(zhuǎn)和平移兩部分:

其中λ即相機(jī)位移中的未知尺度因子,也是區(qū)分?jǐn)U展手眼標(biāo)定和傳統(tǒng)手眼標(biāo)定的參數(shù)。Tsai等人證明至少兩組旋轉(zhuǎn)軸不平行的運(yùn)動(dòng)才能唯一確定X[1]。當(dāng)然,由于傳感器測量噪聲的存在,更多運(yùn)動(dòng)將有助于減小誤差。此外,當(dāng)λ為1時(shí),擴(kuò)展手眼標(biāo)定退化成為傳統(tǒng)手眼標(biāo)定,也就是說傳統(tǒng)手眼標(biāo)定可以看作是擴(kuò)展手眼標(biāo)定的一種特例。因此,擴(kuò)展手眼標(biāo)定算法也可以用于求解傳統(tǒng)手眼標(biāo)定問題。
2 提出的新算法
本章節(jié)首先會(huì)引入將公式(1)線性化的基本理論,接著提出兩種凸優(yōu)化方法求解線性公式得到手眼變換結(jié)果。
2.1 線性方程
線性方程有著廣泛的應(yīng)用場景并已經(jīng)被研究數(shù)十年,所以其理論是相對(duì)完整的。如果能將公式(1)轉(zhuǎn)換成線性方程組,則將會(huì)非常容易求解。為了達(dá)到此目的,本文首先引入兩個(gè)定義:
定義1(列向量運(yùn)算符)給定一個(gè)矩陣V∈?m×n,將V的列向量表示為vec(V)∈?mn,將V的行向量表示為v1,v2,…,vn∈?n,則

此外,定義 vec-1(V)為 vec(V)的逆運(yùn)算,即vec-1(vec(V))=V。
定義2(克羅內(nèi)克積)給定兩個(gè)矩陣M∈?o×p和N∈?q×r,定義二者的克羅內(nèi)克積,M?N,為
可以證明下面的等式成立:

其中,X,Y和Z是任意的維度相容的矩陣。
利用以上兩個(gè)定義及其性質(zhì),將公式(2)和公式(3)改寫為:

通過整合公式(7)和公式(8),可以得到公式(9):
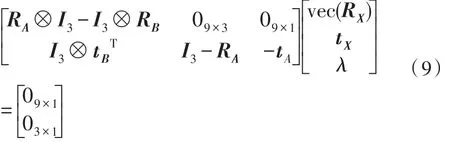
顯然,公式(9)有無窮多解,但事實(shí)上還有另外一個(gè)約束:RX是旋轉(zhuǎn)矩陣,則RX正交且其行列式為1。根據(jù)這個(gè)性質(zhì)求解出公式(9)后計(jì)算約束參數(shù)α。Andreff等人證明α的值為:

其中r=vec-1(v),其中v是公式(9)的解的前9個(gè)元素,det(r)是r的行列式。當(dāng)然,由于噪聲的存在,估計(jì)出來的旋轉(zhuǎn)矩陣往往不是正交的,所以求解時(shí)需要加入正交化,本文采用QR分解來進(jìn)行正交化。
2.2 利用凸優(yōu)化求解線性方程
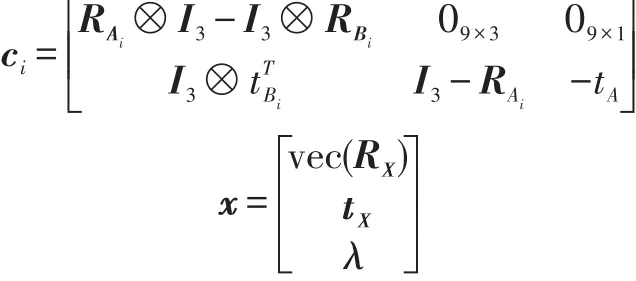
假設(shè)有N次手眼運(yùn)動(dòng),可以得到N組等式(9),定義:
定義L2范數(shù)代價(jià)函數(shù)為:

顯然,該函數(shù)是凸函數(shù)。值得注意的是,x=013×1是公式(9)的一個(gè)解。為了避免代價(jià)函數(shù)趨向于0,需要設(shè)置一個(gè)約束。本文約束x的第一個(gè)元素,x1,大于一個(gè)很小的正數(shù)ò,本文設(shè)置ò為10-6。總之,最終的凸優(yōu)化模型為:

公式(12)可以利用凸優(yōu)化工具箱,如CVX[14],求解。
在文獻(xiàn)[5]和文獻(xiàn)[10]中,L∞范數(shù)展示出了非常好的結(jié)果,受此啟發(fā),本文也提出了基于L∞范數(shù)的代價(jià)函數(shù):

該函數(shù)同樣也是凸函數(shù),定義基于L∞范數(shù)的凸優(yōu)化模型:

基于凸優(yōu)化求解擴(kuò)展手眼標(biāo)定算法的過程總結(jié)在算法1中。
算法1基于凸優(yōu)化的擴(kuò)展手眼標(biāo)定算法
輸入:N對(duì)手眼運(yùn)動(dòng)變換
基于(12)或者(14)建立L2范數(shù)或L∞范數(shù)凸優(yōu)化模型;
利用CVX求解x;
2.3 消除λ
值得注意的是,手眼標(biāo)定中的旋轉(zhuǎn)可以由公式(2)求解而不受平移和λ影響。所以一些利用公式(2)求解旋轉(zhuǎn)的傳統(tǒng)手眼標(biāo)定算法,如文獻(xiàn)[1]和[2]提出的算法,仍然可以用在擴(kuò)展手眼標(biāo)定中。接著,在公式(3)中,如果λ能被消除,tX就可以簡單的求解出來。下面本文展示如何消除λ,在此之前先引入另外一個(gè)定義。
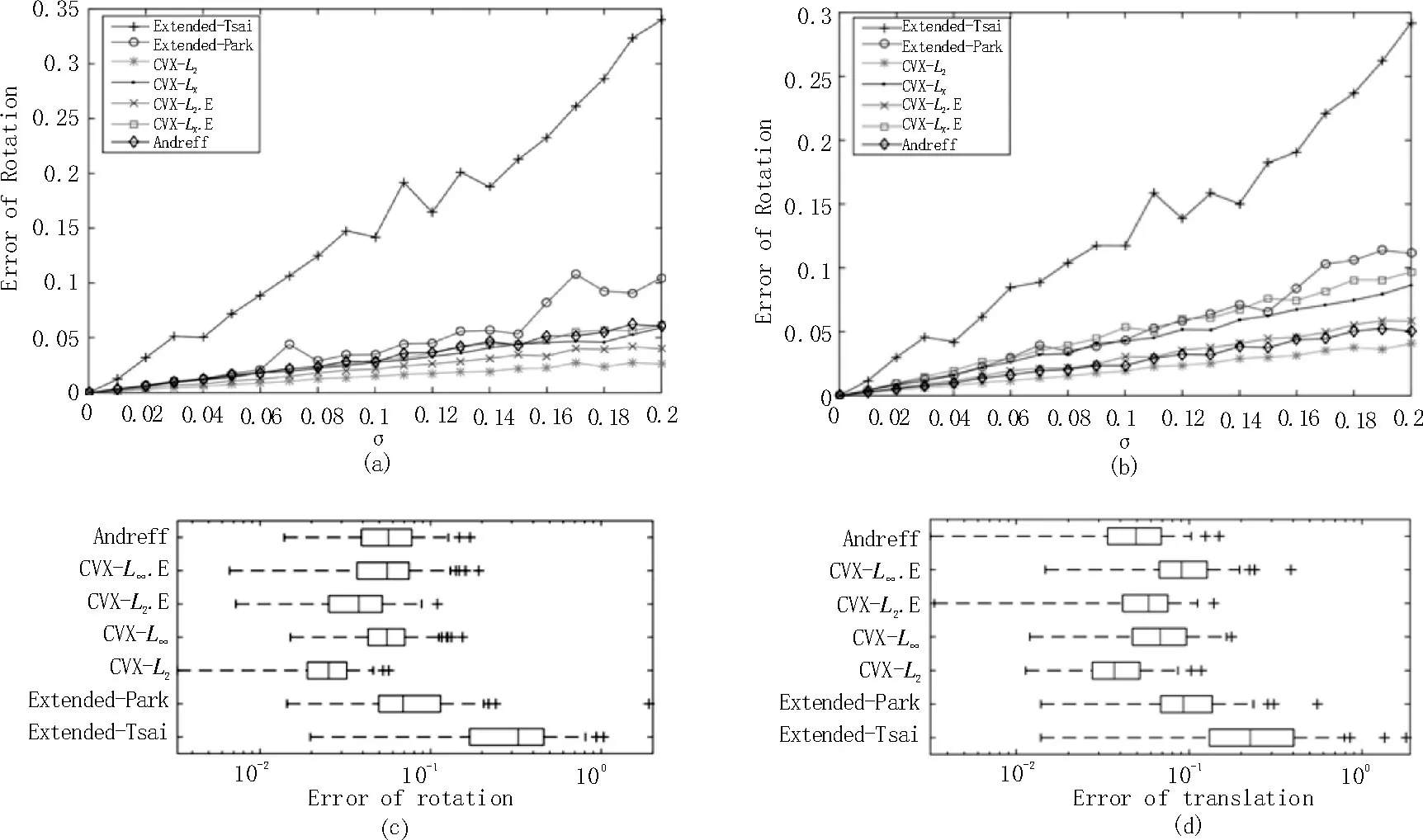
圖2 變換估計(jì)誤差vs.噪聲標(biāo)準(zhǔn)差

隨著λ被消除,則文獻(xiàn)[1]和[2]中提出的方法可以利用公式(16)來求解tX。
更重要的是,公式(16)可以轉(zhuǎn)化為線性方程:

合并公式(16)和(17),可以得到公式(1)的另一種線性表示:
顯然,也可以利用公式(18)構(gòu)建類似于(12)和(14)的凸優(yōu)化模型來求解手眼變換。
3 實(shí)驗(yàn)
為了驗(yàn)證提出的新算法的性能,本文設(shè)計(jì)了仿真數(shù)據(jù)和實(shí)際數(shù)據(jù)實(shí)驗(yàn)。首先,為了和已有算法進(jìn)行對(duì)比,利用本文中提出的消除λ的方法擴(kuò)展了文獻(xiàn)[1]和文獻(xiàn)[2]提出的算法,并將其命名為“extended-Tsai”和“extended-Park”。擴(kuò)展后的算法與原始算法類似,仍然是先估計(jì)旋轉(zhuǎn)后估計(jì)平移兩個(gè)步驟。這里,將本文提出的算法命名為“CVXL2”和“CVX-L∞”,分別對(duì)應(yīng)于(12)和(14),此外,對(duì)應(yīng)的消除λ后的算法被命名為“CVX-L2-E”和“CVX-L∞-E”。為了對(duì)比,本文還實(shí)現(xiàn)了文獻(xiàn)[8]中提出的算法:首先利用SVD分解求解旋轉(zhuǎn),然后用最小二乘法估計(jì)平移,本文將其命名為“Andreff”。硬件平臺(tái)方面,所有算法都運(yùn)行在一臺(tái)搭載英特爾酷睿i7-4790 CPU以及8G RAM的PC機(jī)上。軟件環(huán)境為運(yùn)行在64位Ubuntu 14.04上的MATLAB 2015b。
3.1 仿真數(shù)據(jù)實(shí)驗(yàn)
仿真數(shù)據(jù)的生成方式如下:首先,本文設(shè)定一個(gè)固定的變換X和尺度因子λ。然后隨機(jī)生成數(shù)個(gè)手運(yùn)動(dòng)(B),接著利用等式A=XBX-1計(jì)算出眼運(yùn)動(dòng)(A)。最后,用尺度因子λ縮放A中的平移。此外,為了評(píng)估算法的抗噪聲能力,本文在手眼運(yùn)動(dòng)的旋轉(zhuǎn)和平移都加入了高斯隨機(jī)噪聲,噪聲的均值為0,標(biāo)準(zhǔn)差σ從以0.01的步長從0增加至0.2。對(duì)于每一個(gè)不同的σ,生成100組仿真數(shù)據(jù),每組數(shù)據(jù)包含30對(duì)手眼運(yùn)動(dòng)。
為了量化誤差方便對(duì)比各算法的性能,本文定義旋轉(zhuǎn)和平移誤差如下:
圖2(a)和2(b)展示了當(dāng)從0.0到0.2變化時(shí),估計(jì)誤差的變化情況。從圖中可以看出,其中“CVX-L2”在旋轉(zhuǎn)和平移方面的表現(xiàn)均為最優(yōu)。另一方面,兩種基于L2范數(shù)的方法性能要優(yōu)于另外兩種基于L∞范數(shù)的方法,說明L2范數(shù)更加適用于手眼標(biāo)定這一應(yīng)用場景。
圖2(c)和2(d)分別是是當(dāng)σ為0.2時(shí)的旋轉(zhuǎn)和平移誤差箱線圖。從圖中可以看出,“CVX-L2”的分布更加密集,表明該方法相比于其他方法更加魯棒。然而,大的異常值表明“extended-Tsai”和“extended-Park”對(duì)噪聲非常敏感。
3.2 真實(shí)數(shù)據(jù)實(shí)驗(yàn)
想要準(zhǔn)確的測量相機(jī)與其他傳感器的坐標(biāo)系變換并不容易,因?yàn)橄鄼C(jī)的位姿往往無法直接測量,這就導(dǎo)致無法獲得手眼變換的真值去驗(yàn)證手眼標(biāo)定的算法的性能。一些作者[5-6,9]通過計(jì)算估計(jì)出的相機(jī)運(yùn)動(dòng)A?i=XBiX-1與實(shí)際運(yùn)動(dòng)Ai的差值來評(píng)估手眼標(biāo)定算法的性能,但這樣的問題在于Ai是通過SFM得到的,其本身就存在誤差。文獻(xiàn)[10]則將手動(dòng)測量結(jié)果作為真值,但這種方法顯然也存在誤差。為了能夠解決沒有真值的問題,本文創(chuàng)新地提出了一種特別的標(biāo)定應(yīng)用來評(píng)估算法。
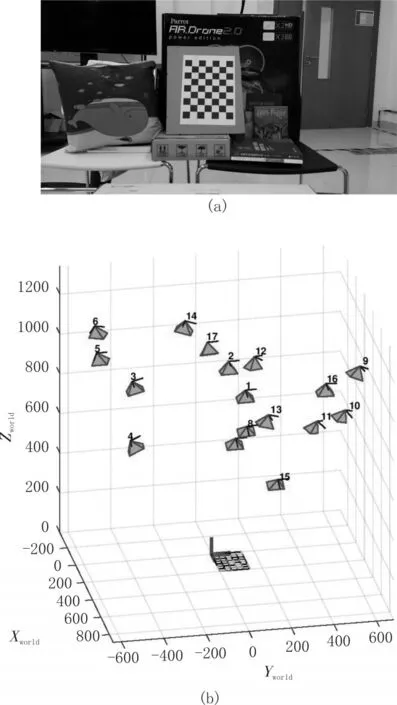
圖3 (a)為實(shí)際數(shù)據(jù)實(shí)驗(yàn)場景示意圖;(b)為棋盤格標(biāo)定法得到的相機(jī)位姿
文中假設(shè)實(shí)驗(yàn)中在標(biāo)定“兩個(gè)”相機(jī),但事實(shí)上這兩個(gè)相機(jī)是同一個(gè):本文搭建一個(gè)特殊的場景,場景中包含一個(gè)標(biāo)定板,如圖3(a)所示。然后,移動(dòng)相機(jī)的同時(shí)采集一系列圖像,并且保證在移動(dòng)過程中標(biāo)定板始終完整地出現(xiàn)在相機(jī)視野內(nèi)。采集完數(shù)據(jù)后,一方面,本文用棋盤格標(biāo)定法[7]來確定相機(jī)位姿;而另一方面,忽略場景中有棋盤格,而用SFM來確定相機(jī)位姿。本文將用棋盤格標(biāo)定的“相機(jī)”作為“手”,將用SFM標(biāo)定的“相機(jī)”作為“眼”,而“手”和“眼”其實(shí)是同一個(gè)相機(jī),所以手眼標(biāo)定的真值是零。通過這種搭建的特殊的場景,本文克服了沒有真值的問題。
文中使用一個(gè)三星Galaxy S6手機(jī)的后置相機(jī),關(guān)閉其自動(dòng)對(duì)焦,并將分辨率設(shè)為3264×1836像素。標(biāo)定板每個(gè)格子的大小為28×28 mm。本文采集了不同位置不同角度的17張圖像。首先標(biāo)定相機(jī)的內(nèi)參和外參,標(biāo)定后相機(jī)的位姿如圖3(b)所示。計(jì)算機(jī)視覺庫Theia[15]中包含了SFM整個(gè)流程的算法,本文利用其計(jì)算相機(jī)的位姿。為了減少異常值,本文從17張圖像中去15張作為一組樣本,這樣總共有組不同的樣本。而每組中有14個(gè)獨(dú)立的相機(jī)運(yùn)動(dòng)。各種算法[16]的標(biāo)定結(jié)果如圖4所示,由于平移真值是03×1,為了避免在公式(19)計(jì)算誤差時(shí)出現(xiàn)除0,本文直接將算法估計(jì)出來的平移的L2范數(shù)作為平移誤差。
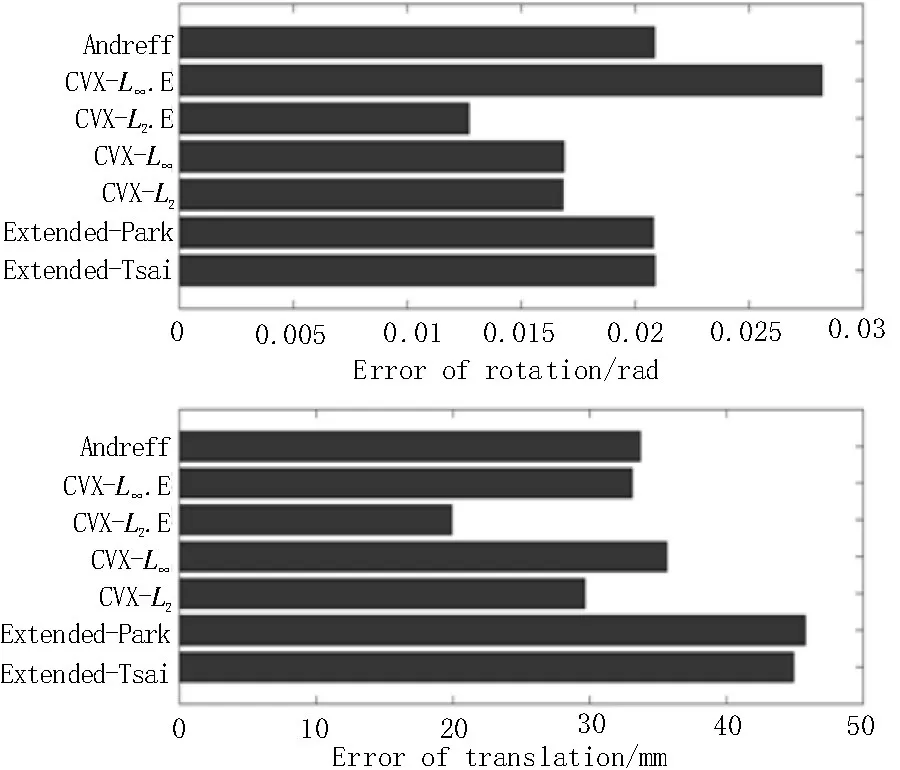
圖4 實(shí)際實(shí)驗(yàn)數(shù)據(jù)下不同算法的誤差對(duì)比
圖4表明“CVX-L2-E”誤差最小,“CVX-L2”其次。該實(shí)驗(yàn)再次表明L2范數(shù)在手眼標(biāo)定這個(gè)問題上的性能要好于L∞范數(shù)。“CVX-L2-E”的旋轉(zhuǎn)誤差較大,表明L∞范數(shù)對(duì)噪聲更加敏感。由于誤差傳播的原因,“extended-Tsai”和“extended-Park”仍然性能最差。
4 結(jié)束語
文中提出了兩種基于凸優(yōu)化的擴(kuò)展手眼標(biāo)定算法。第一種方法是將AX=XB轉(zhuǎn)化為線性方程組,然后建立L2范數(shù)或L∞范數(shù)優(yōu)化模型,用凸優(yōu)化工具箱求解。第二種方法則先消除了未知的尺度因子,然后用類似于方法一的方式求解。仿真數(shù)據(jù)實(shí)驗(yàn)和實(shí)際數(shù)據(jù)實(shí)驗(yàn)證明基于L2范數(shù)的凸優(yōu)化算法在精度方面性能最好[17]。在以后的工作中,我們將嘗試將本文提出的算法應(yīng)用到相機(jī)和其他傳感器,如3D激光雷達(dá)的標(biāo)定中去。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
海峽姐妹(2020年9期)2021-01-04 01:35:44
VOGUE服飾與美容(2020年9期)2020-09-02 14:47:26
山東青年(2016年1期)2016-02-28 14:25:25
現(xiàn)代企業(yè)(2015年2期)2015-02-28 18:45:09
當(dāng)代修辭學(xué)(2014年3期)2014-01-21 02:30:44