基于FPGA的無線通信電動機保護器
2018-10-25 08:08:14孫旭霞劉一棟寧紅英
微特電機 2018年11期
孫旭霞,劉 麗,劉一棟,寧紅英
(西安理工大學,西安 710048)
0 引 言
電動機作為為各種機電設備提供動力支持的動力設備,被廣泛地用于工業生產及日常生活中。在實際使用中,由于人為失誤、電網不穩定、負載沖擊等影響,經常引發電動機故障[2],造成電動機燒損,打亂或中斷生產計劃,甚至引發重大安全事故。因此對電動機進行監測和保護,能減少電動機燒損,保證安全生產,節能減排,增進經濟效益,提高生產效率,即開發一款新型智能電動機保護監控裝置具有重要意義。
目前,綜合電動機微機保護一般采用單片機作為控制器,處理復雜算法能力差,程序響應速度慢;在高速信號處理中趨向選擇具有高速性、并行性和靈活性的FPGA。傳統電動機保護采用多片A/D芯片實現多路信號同步采樣,需要元器件多,進而硬件電路復雜;或采用高采樣率A/D芯片逼近同步采樣,同步性差,使故障診斷出現誤判,影響電動機的正常使用;隨著集成電路的發展,高速多通道同步采樣A/D芯片問世,解決了多路信號同步采樣問題。電動機保護中實現遠程監控的網絡通信,傳統采用有線通信方式,其信息傳輸依賴有線信道,受到布線條件的約束。而非接觸式點對點數據傳輸的無線通信方式具有更好的靈活性和擴展性。
本文針對三相電動機逆相、斷相、三相不平衡、堵轉、短路、過載等常見的保護需求,設計了一種基于FPGA微處理器EP4CE10F17C8為控制核心、高速多通道同步采樣的AD7606為數模轉換芯片、具有Wi-Fi無線通信功能的電流取樣型智能電動機保護器。
1 故障檢測原理
電動機故障分為對稱故障和非對稱故障[2-3],本文采用對稱分量法進行故障特征提取。對稱分量法將不對稱三相系統的電流相量Ia,Ib,Ic分解成3組相序不同的對稱分量:正序分量Ia1,Ib1,Ic1;負序分量Ia2,Ib2,Ic2;零序分量Ia0,Ib0,Ic0。
三相電流向量與其對稱分量之間的關系:
Ia=Ia1+Ia2+Ia0
(1)
Ib=Ib1+Ib2+Ib0
(2)
Ic=Ic1+Ic2+Ic0
(3)

(4)
逆關系:
(5)
電機發生接地故障時產生的零序電流I0=Ia+Ib+Ic。
電動機在正常運行和發生對稱故障時,電動機定子電流的負序和零序分量沒有或者很小,在發生非對稱故障時才出現[3];因此可依據過電流和零、負序電流分量進行各類故障判別。由對稱分量法得到電動機在不同故障下的特征,如表1所示。
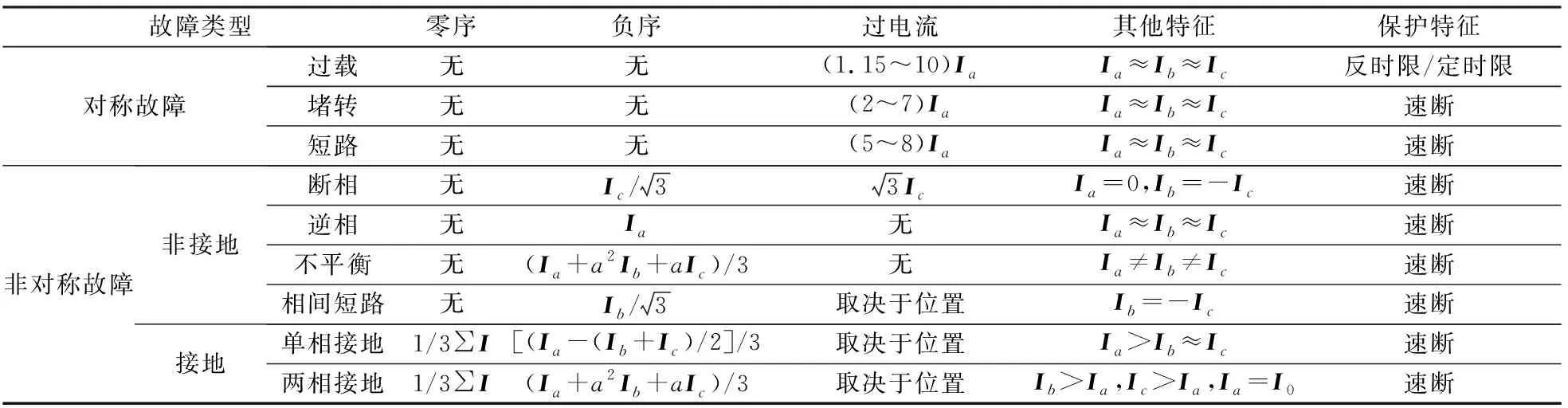
表1 電動機故障特征
2 系統總體設計
該保護器系統整體結構如圖1所示,主要包括控制器、信號采集、數模轉換、人機交互和無線通信等模塊。信號采集模塊將三相電動機的電流、電壓信號轉換成小電壓信號送入AD7606進行數模轉換,轉換輸出的數字信號進入EP4CE10F17C8進行數據處理分析和故障判斷。當診斷出電動機發生故障且已到保護時間,控制器控制繼電輸出與報警電路進行保護和報警,并將故障信息存儲到SD卡中;同時,電動機的工作參數、狀態等會實時顯示在液晶屏上,按鍵也可設定不同型號電動機的額定參數和故障保護動作時間。此外,Wi-Fi通信模塊把開發的手機應用程序與電動機保護裝置連接成一個網絡系統,進行實時監控與信息傳輸。
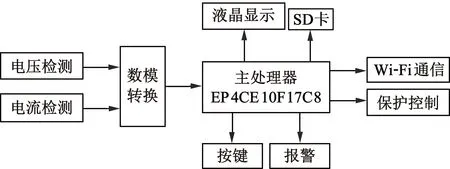
圖1 系統組成結構圖
3 系統硬件設計
3.1 信號采集
采用霍爾傳感器把三相電動機的電流、電壓信號轉換成小電壓信號,經調理濾波電路處理后進入A/D模塊進行數模轉換。本文選用HBV10A5電壓霍爾傳感器和HBC20LSP電流霍爾傳感器,把采樣到的交流信號轉換為0~5 V的電壓信號。霍爾傳感器信號轉換電路如圖2所示。
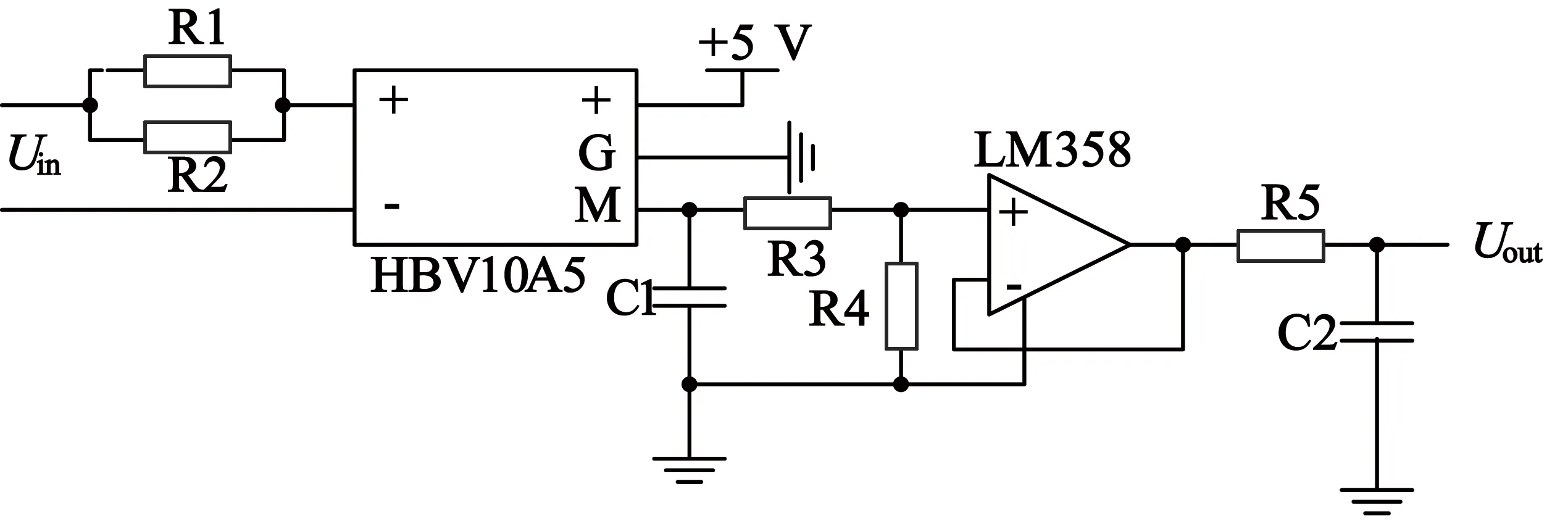
(a) 單相電壓轉換電路

(b) 單相電流轉換電路
3.2 A/D轉換
A/D轉換選用自帶濾波器的AD7606,它具有濾波作用,能和FPGA構成一個8通道同步采樣系統。本文控制器FPGA作為可編程邏輯控件,可以采用具有高速性、穩定性、高效性的狀態機的形式,編寫設計AD7606的高速多通道同步采樣的時序控制[7],其A/D采樣控制如圖3所示。本文將AD7606轉換控制信號CONVSTA和CONVSTB短接在一起實現8通道同步采樣。
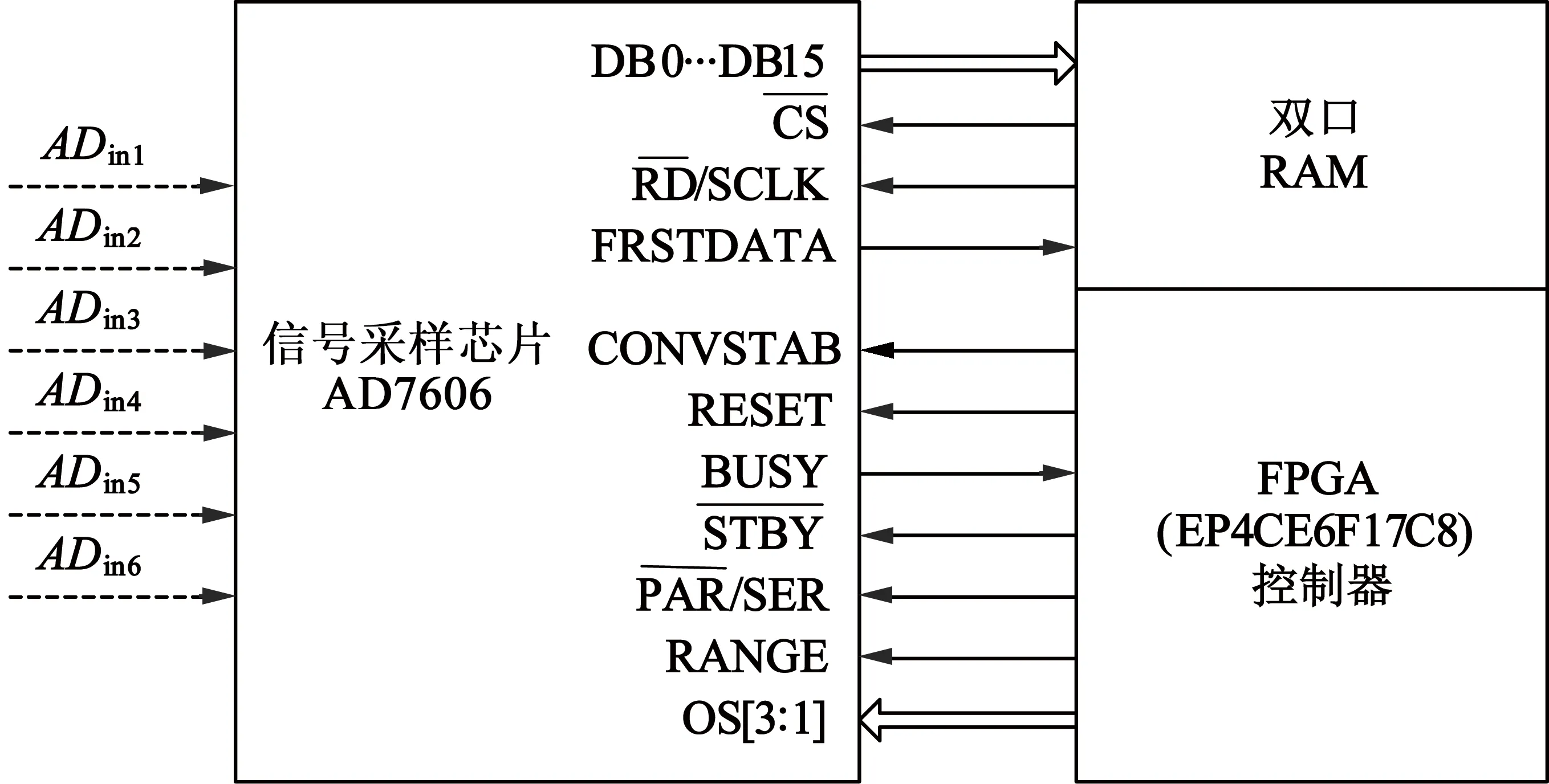
圖3 AD采樣控制框圖
3.3 人機交互
人機交互包括TFT液晶屏顯示、按鍵輸入、SD卡信息存儲、蜂鳴器報警和繼電輸出保護。選用7寸AT070TN83液晶屏顯示電動機的工作狀態和參數,按鍵設置電動機額定參數和保護動作時間。在電動機出現故障進行保護時,蜂鳴器實現報警功能,擴展出支持SPI模式和SD模式的SD卡來存儲電動機故障信息;同時控制器控制繼電輸出電路的繼電器動作對電動機進行保護。繼電輸出保護控制電路如圖4所示。
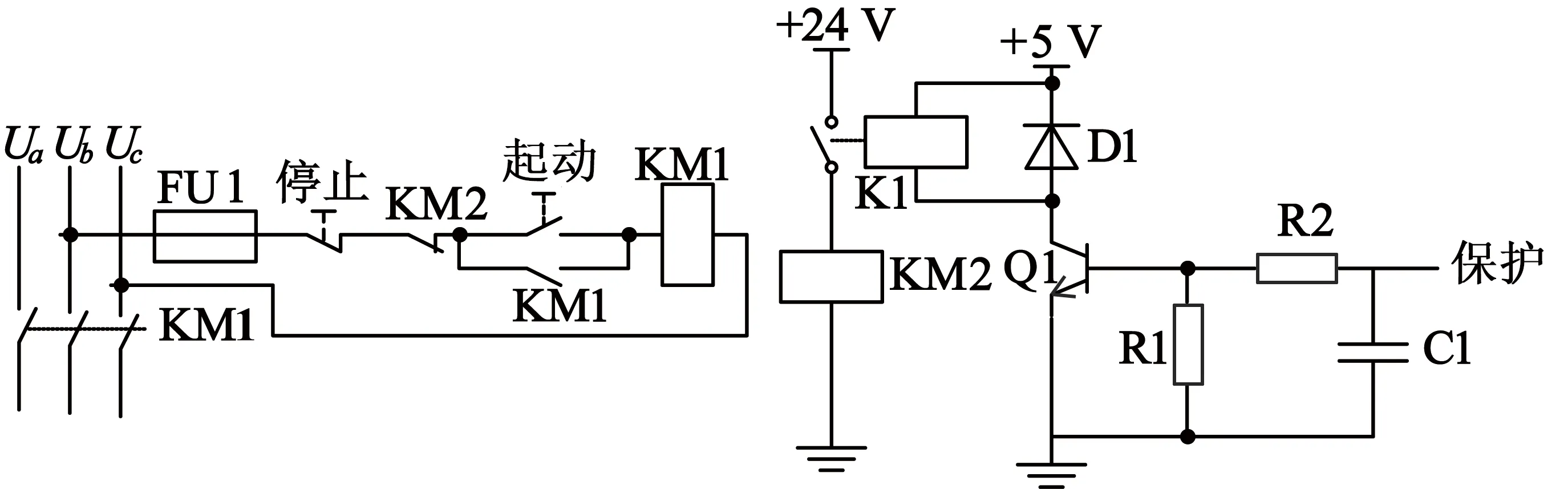
圖4 繼電輸出保護控制電路
3.4 無線通信
Wi-Fi通信選用模塊HLK-RM04,引腳分配如表2所示。
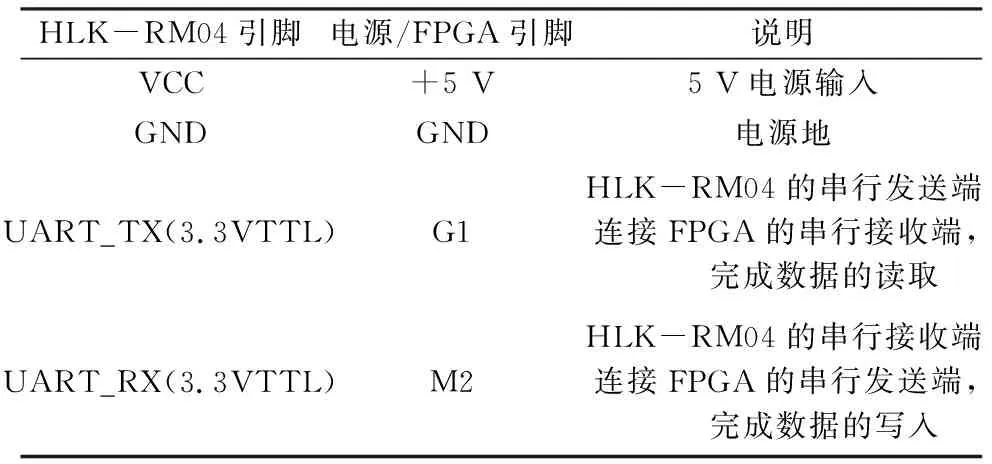
表2 HLK-RM04引腳分配
本文無線通信采用Android開發的APP與電動機保護裝置通過HLK-RM04搭建的局域網進行數據的交互,運行于手機端的網絡程序通過局域網與電動機保護器建立起TCP連接,待連接成功后,用戶使用手機端的用戶界面軟件向電動機保護器設置各種系統參數和實時顯示電動機運行狀態。
4 系統軟件設計
Verilog HDL編寫系統軟件分成8個模塊來分別設計,包括AD7606信號采集模塊、FFT數據處理模塊、相位檢測模塊、對稱分量法分析模塊、故障判斷模塊、APP串口通信模塊、按鍵處理模塊、液晶顯示模塊,其系統軟件結構如圖5所示。

圖5 系統軟件結構圖
系統上電后,主控制程序先進行系統初始化和電動機參數設置自檢,再采集電流、電壓信號進行實時處理,并計算過電流和零、負序電流分量,接著進行故障判斷,其主控制流程圖如圖6所示。

圖6 系統軟件主控制流程圖
故障診斷分別依據零、負序電流分量和過電流對非對稱故障的接地、非接地故障和對稱故障進行分析判別。例如,斷相故障屬于非對稱故障中的非接地故障,由表1可知,當出現斷相故障時,有負序電流分量,且三相電一相為零兩相相等,即可以根據這一特征來判斷是否出現斷相故障,其判斷流程圖如圖7所示。
網絡通信中,采用Android開發的手機應用程序主要實現如下2個功能:一是監控,查看電動機的額定參數和當前工作下的電流、電壓、功率、狀態等;二是系統參數設置,主要設置被保護電動機的額定參數和各種故障的動作時間。

圖7 斷相故障判斷流程圖
5 實驗驗證
在如圖8所示的實驗平臺上,采用微機多功能繼電保護測試儀對保護器進行實際測試。圖8中,繼電保護測試儀的輸出接保護器采樣電路的輸入,FPGA根據交流采樣傳輸進來的數字信號判斷出電動機工作情況,實時顯示在液晶屏上。從圖9的液晶屏可看出,電動機的額定電壓、電流分別設置為220 V和5 A。
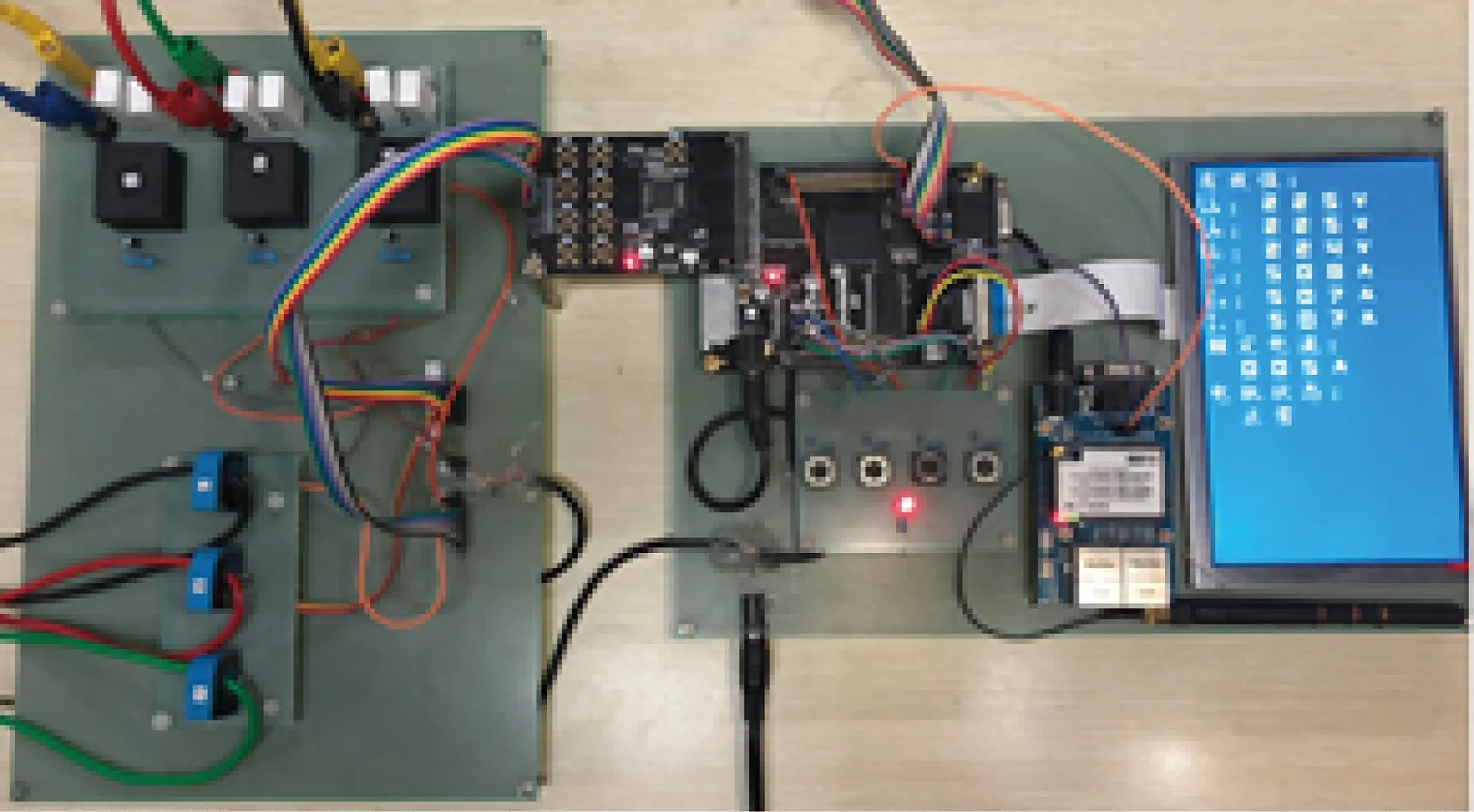
圖8 電動機保護器實驗平臺
在繼電保護測試儀輸出電壓220 V,電流5 A和7.2 A時,手機APP的顯示如圖9所示。
其中,圖9(a)的繼電保護測試儀模擬的是電動機工作在無過電流的三相對稱狀態;圖9(b)模擬的是電動機工作在有過電流的三相對稱狀態,且過電流約是額定電流的1.44倍(7.2 A)。state是指電動機的工作狀態,其中00,01分別代表正常和過載。可見,該保護器能準確計算出電動機當前工作下的各種信息數據,診斷出電動機是否發生故障,若出現故障,并分析出故障類型。同時還可看出無線通信的數據傳輸正常,手機APP對電動機運行狀態實現了實時監控。

(a) 電流為5 A

(b) 電流為7.2 A
6 結 語
該保護器采用具有高速性、并行性、靈活性的EP4CE10F17C8實現FFT算法和對稱分量分析法,提高數據處理精度;采用AD7606芯片實現同步采樣,保證多路信號的同步性;采用非接觸式點對點數據傳輸的Wi-Fi技術實現遠程監控,具有較好的靈活性和擴展性。經反復實驗測試測得,電壓誤差為2.3%,電流誤差為1.7%,保護動作時間誤差為0.5%,誤差精度小,滿足設計要求。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
中國生殖健康(2019年3期)2019-02-01 06:12:26
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34