地埋式垃圾壓縮站遙控系統設計
2018-10-27 03:25:48河南工程學院土木工程學院河南鄭州市451191
石河子科技 2018年4期
(河南工程學院 土木工程學院,河南鄭州市,451191) 徐 平
(河南工程學院 機械工程學院,河南鄭州市,451191) 閆修鵬 李 英
隨著城市垃圾數量的不斷增加,垃圾處理日益受到關注[1]。常見的處理方式有填埋堆肥、焚燒及熱解氣化等,無論是哪一種處理方式,其收集和運輸是必要的環節[2]。目前主要的城市生活垃圾處理工藝有填埋、堆肥、焚燒、熱解氣化及綜合利用技術五種[3],據2015年的統計數據顯示填埋處理量占63.9%;焚燒處理量占33.9%;其他處理方式占2.2%[4]。無論是哪一種處理方式,其收集和運輸都是必要的環節,但是傳統的收集過程沒有對垃圾進行有效的壓縮,使得垃圾體積較大,增加運輸量的同時還增加了垃圾存儲或者填埋場地,同時還大大降低垃圾的腐化。
為此垃圾在收集的同時進行壓縮然后再運輸已經成為一種有效減少垃圾體積、運輸量、場地和腐化性的方法,因此設計開發用于固體垃圾的收集壓縮和運輸的設備成為垃圾處理領域的研究熱點[5,6]。目前垃圾壓縮站有兩種,一種是地埋式垃圾壓縮站[7],一種是移動式垃圾壓縮站[8,9],由于地埋式垃圾壓縮站垃圾壓縮處理能力要強于移動式垃圾壓縮站,因此在一些垃圾量較大的地方有著廣泛的應用。
對于埋地式垃圾壓縮站來說,目前其操作時基本是面板操作,操作時離壓縮站距離較近,由于垃圾種類繁多,且沒有經過處理,使得操作環境比較惡劣,特別是在夏天,甚至無法接近操作面板。為此,針對某款地埋式垃圾壓縮站,設計了遠程遙控系統。
1 垃圾壓縮站基本結構及工作原理
地埋式垃圾壓縮站的主要結構如圖1所示,主要包括機架、液壓油缸、壓頭、箱體中門和垃圾箱,其中,液壓油缸包括主副液壓缸,輔助液壓缸連接在頂部橫梁上,主液壓缸頂部與壓頭相連,壓頭對垃圾箱內部的垃圾進行壓縮處理。
壓縮時,先由輔助液壓缸帶動壓頭向下伸展,達到最大行程后保持不動,再由主缸驅動對垃圾進行壓縮。完成壓縮后,推鏟機構將垃圾塊推至垃圾儲存箱內,再進行第二塊壓縮,待全部完成后,壓頭上的掛鉤與箱體上的掛鉤相連,在主缸的驅動下將其抬升至指定位置,最后由推鏟油缸驅動推鏟將垃圾塊推至轉運車上。
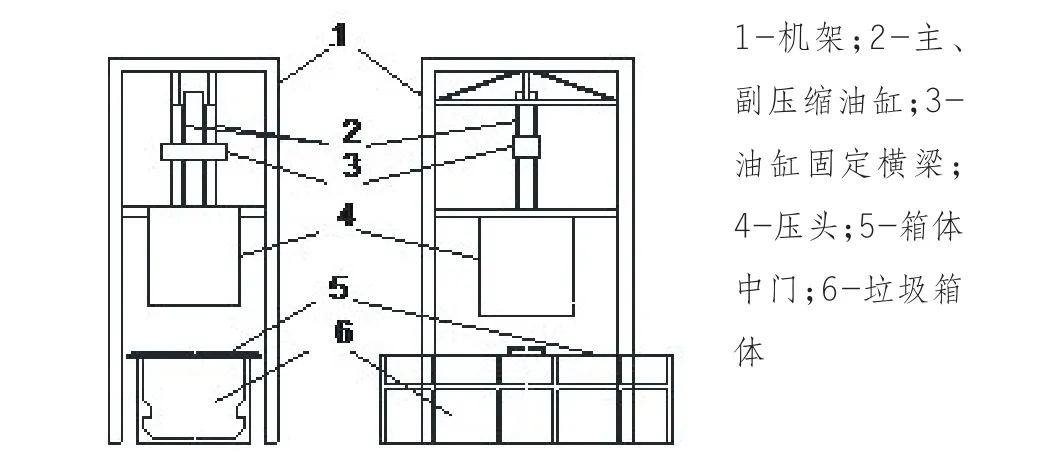
圖1 垃圾站總體圖
根據壓縮站的總體布局,系統中共有12個液壓缸,其中主、副液壓缸是1路管路,垃圾推入缸單獨1路液壓管路,前門升缸、掛箱缸、安全掛鉤和中門升缸都是左右各2個,左右兩個缸是同一管路,因此實際的控制閥只需要6個即可,每個控制閥分別有前進和后退兩個操作,為此需要12個電磁閥,如圖2所示。
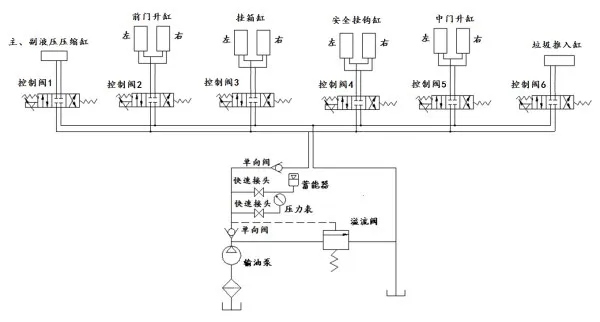
圖2 液壓系統總體布局圖
2 控制系統設計
如前所述,此次設計是在原控制系統的基礎上設計一遠程遙控系統,為此本設計的主要內容為利用單片機作為控制芯片,通過程序控制繼電器的狀態,繼而控制液壓缸的工作狀態以達到控制垃圾壓縮站的目的,其控制原理圖如圖3所示。控制系統主要由信號發射、信號接收、單片機及繼電器組成。工作時,信號發射裝置傳遞給信號接收裝置一個信號,單片機開始工作,單片機通過內部程序控制繼電器繼而實現對液壓缸的控制,實現對垃圾的壓縮處理,12路控制的原理完全一致。
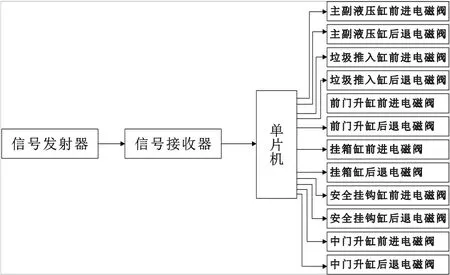
圖3 控制系統結構框圖
為此,控制系統主要是遠程遙控系統,主要包括單片機最小系統、無線發射模塊、無線接收模塊和繼電器控制。
2.1 單片機最小系統
單片機最小系統指的是其能正常工作所必須的外圍元件,大體可分為時鐘電路和復位電路。此次設計選用的是AT89S51單片機,其自帶4K的FLASH程序存儲器,256B的RAM,32個I/O口,五個中斷源、兩個16位定時器,完全滿足外部輸入和控制輸出通道數的要求;復位電路采用上電復位方式;時鐘電路晶振11.0592MHz,其結構原理圖如圖4。
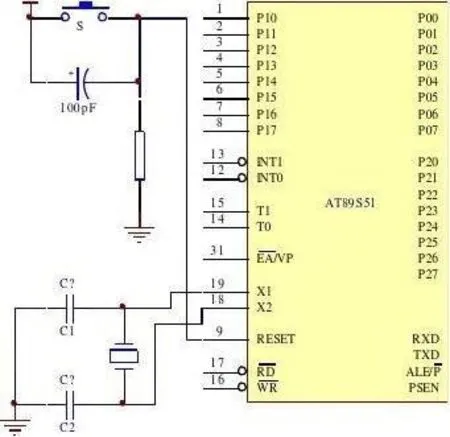
圖4 單片機最小系統
2.2 遙控部分設計
遙控部分的基本原理是利用三極管將編碼器的信號進行放大,調制后,將此脈沖波經由紅外發射管轉變為光信號發射出去,波長為940nm。而接收管將接收到光信號后轉換為電信號,經過放大-增益-濾波-解調變-整形還原后,還原出遙控器給出的原始編碼,此時接收頭信號,并輸入到后續代碼對進行識別。
紅外遙控部分選用PT2262/2272芯片為主構成的無線遙控器,PT2262/2272互為配套,一對帶地址和數據編碼功能的遙控發射芯片和接收芯片。
PT2262是載波振蕩器、編碼器和發射單元三者都集成于一身的芯片,負責控制信號的發射。需要說明的是,為了節省發射控制器面板,只布置了4個按鍵,通過不同組合來實現12個動作的操作,其操作屬于點動式遙控,每按下一個按鍵就有對應的電磁波信號發射出去,無線發射裝置電路如圖5所示。
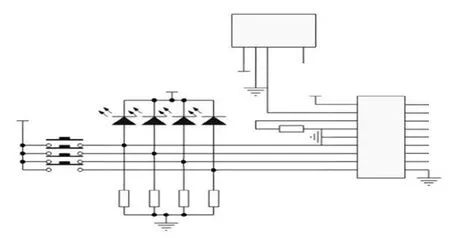
圖5 無線遙控發射電路
PT2272是接收芯片,能夠實現遙控信號的還原,接收模塊的電路如圖6。
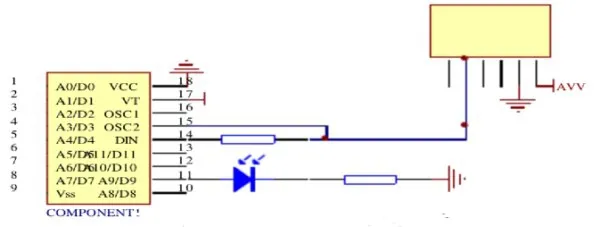
圖6 無線遙控接收電路
2.3 繼電器控制
垃圾壓縮站選用繼電器對液壓缸的運動進行控制,繼電器閉合時對應的液壓閥門開啟,繼電器斷開時對應的液壓閥關閉。因此控制相對簡單,只需要利用I/O口控制繼電器的控制端即可,其控制系統的原理如圖7所示,此處利用二極管來替代外部繼電器控制端。
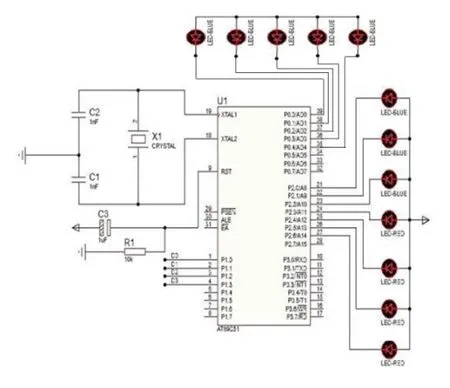
圖7 繼電器控制系統電路
3 軟件程序設計
控制程序相對簡單,只需要檢測按鍵是否按下,然后按照對應的鍵號處理即可,流程圖見圖8。
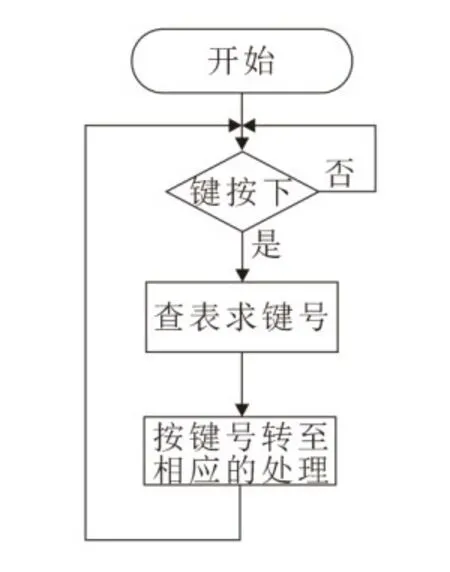
圖8 系統程序框圖
其中查表求鍵號相對復雜,其程序如下:
4 調試結果
如圖9所示為埋地式垃圾壓縮站實物圖,表1為垃圾壓縮站測試結果,包括垃圾處理量,垃圾尺寸、壓縮缸運行速度和推入缸運行速度都滿足要求,并且,通過實際的操作可以實現垃圾壓縮和垃圾箱上車等操作,達到了設計目的。
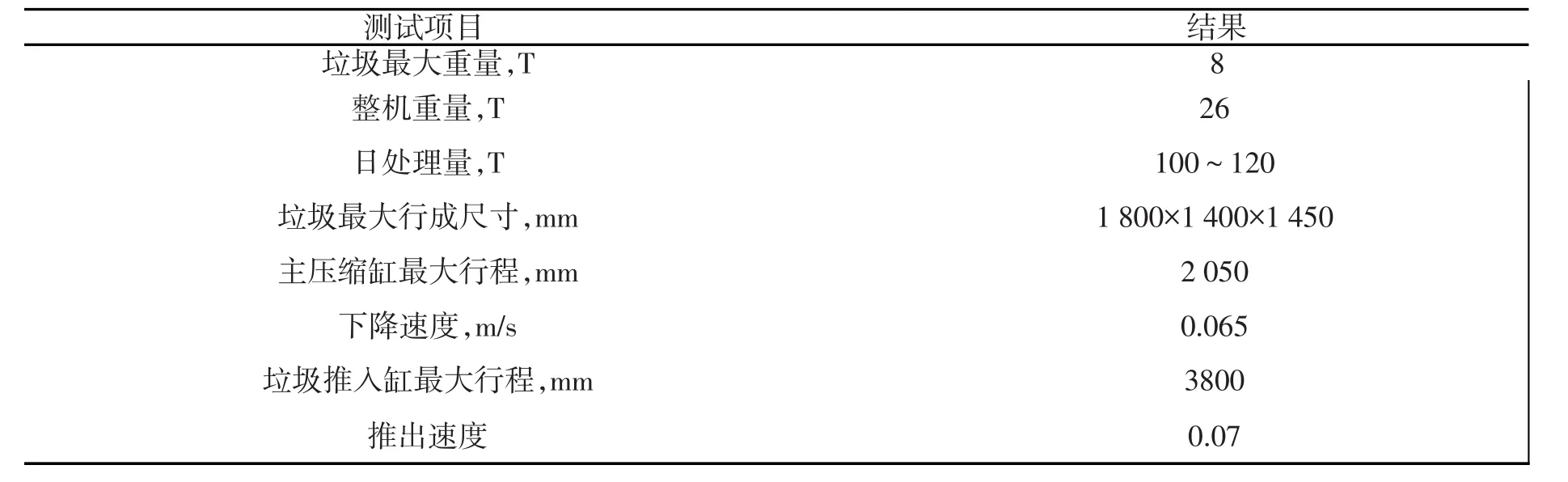
表1 壓縮站測試結果

圖9 垃圾壓縮站實物圖
5 結語
根據實際工程需要,完成了埋地式垃圾壓縮站遙控系統的設計,該設計基于價格便宜的51單片機和遙控模塊,能夠實現工作過程的控制,達到了預期設計目的。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
