智能車場景建模及仿真
2018-10-29 02:31:26鄭磊劉濤王宇蔣鑫王新竹
汽車技術 2018年10期
鄭磊 劉濤 王宇 蔣鑫 王新竹
(中國第一汽車集團有限公司智能網聯開發院,長春 130011)
主題詞:智能車 場景定義 動態場景 靜態場景 聯合仿真
1 前言
汽車行駛安全性是當今世界汽車技術發展重點關注的問題之一[1],為了使汽車行駛更為安全,智能駕駛技術應運而生。隨著智能車技術的不斷發展,完善的測試評價體系成為支撐開發的必備條件[2],而仿真開發和測試將成為智能車研發的必須環節。未來,智能車將面對數以億計的場景和工況,而單純的實車道路測試已很難滿足需求。
智能車研究機構和主機廠對智能車的仿真測試進行了深入研究。Waymo開發了一款名為Carcraft的自動駕駛仿真系統,系統中的模型是根據Austin、山景城、鳳凰城制作的,還有一些模型用于模擬測試車道場景。截止到2018年8月,谷歌真實車行駛了1287萬公里,而虛擬車已經行駛了超過80億公里[3],谷歌自動駕駛工程師通過實車測試和仿真測試尋找自動駕駛汽車存在的隱患與不足,通過仿真手段回溯存在問題的交通場景片段,從而不斷完善算法,與實車測試進行比對,并相互印證。Cruise Automation搭建的虛擬仿真平臺在虛擬世界中的仿真速度可達每分鐘150次,其仿真方法與Waymo類似[4]。奧迪與Cognata公司合作搭建的智能駕駛汽車仿真平臺可根據真實城市創建虛擬城市,并提供各類測試情境,包括可模擬真實條件的交通模型等[5]。微軟和英偉達也相繼推出了其各自的自動駕駛仿真平臺Auto?SIM和Drive Constellation[6]。
智能車的仿真、半仿真開發和測試主要包括模型在環(Model In Loop,MIL)、軟件在環(Software In Loop,SIL)、硬件在環(Hardware In Loop,HIL)、實車在環(Ve?hicle In Loop,VIL)等環節,而虛擬場景的搭建貫穿了全部環節,本文重點研究智能車場景建模及仿真測試。
2 場景定義及結構
2.1 場景定義
對交通場景作如下定義:交通場景為主車及影響主車行駛行為的所有動態和靜態要素集合,包括道路、車輛、行人、交通標志、天氣等。
2.2 場景結構分層
為了能夠實現并規范化虛擬交通場景,將交通場景劃分為路網模型、道路模型、環境模型、情景模型、駕駛員模型和交通模型,如圖1所示。
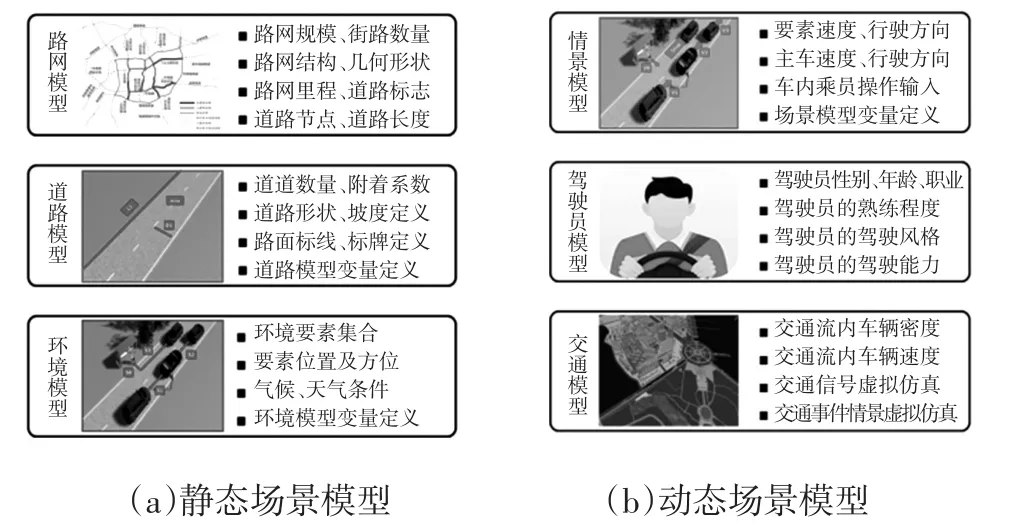
圖1 場景結構分層
2.3 場景變量定義
場景變量為主車及影響主車駕駛行為的所有動態和靜態要素變量,例如主車速度、交通車的行駛速度、道路長度、車道寬度等。
3 靜態場景仿真模型建立
3.1 路網模型
路網模型的內容見圖1a。在建立路網模型時,通常有兩種方法:以衛星地圖為模板,在衛星地圖上搭建路網模型;直接使用OpenDrive通用格式,導入路網模型。
如圖2所示,搭建的路網模型是較為粗糙的道路,而交通標志信息、車道數量、路面標線和坡道等信息并不完整,需要在場景搭建中進行調整和細化。
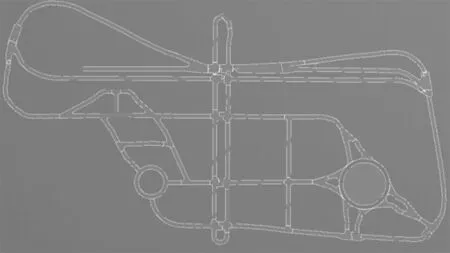
圖2 路網模型
3.2 道路模型
基于上述的路網信息,對道路細節進行細化,將缺失的車道數量、附著系數、坡路信息、道路標線和標志牌等信息補充完整。
3.3 環境模型
只有道路的交通系統是不完整的,需添加主車和交通參與者,例如車輛、行人和交通設施等,并定義其位置、方位等信息。此外,還需對當前天氣環境進行定義,例如光照條件、雨天、雪天和霧天等。圖3所示為設置的環境模型,其中設置了主車和交通車的行駛速度,并設置天氣為雨天。
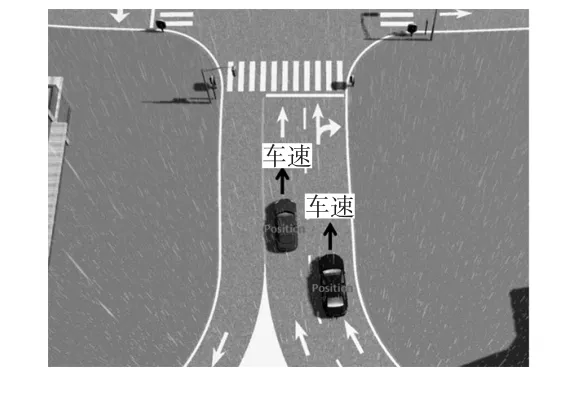
圖3 環境模型
4 動態場景仿真模型建立
4.1 情景模型
布置好主車和交通參與者后,對可運動的交通參與者設置初始行為狀態、軌跡和路徑等信息,使可運動物體遵循設定好的行駛規則前進,如圖4所示。
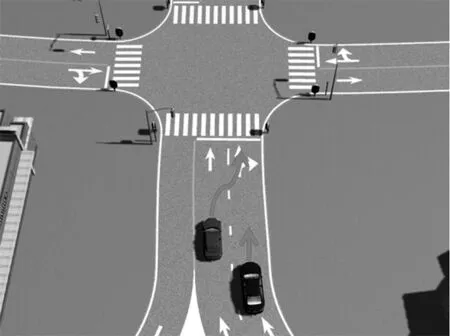
圖4 情景模型
4.2 駕駛員模型
駕駛員因其年齡、性別、職業、駕駛熟練程度和駕駛風格的不同表現出不同的行為特點,影響后續的智能車仿真測試和開發。
4.3 交通模型
交通模型是對局部或整個交通系統中交通參與者行為的整體描述,行人和車輛的設置要遵循交通模型。交通模型可由獨立于場景軟件之外的專業交通流軟件進行驅動,形成聯合仿真,如圖5所示。
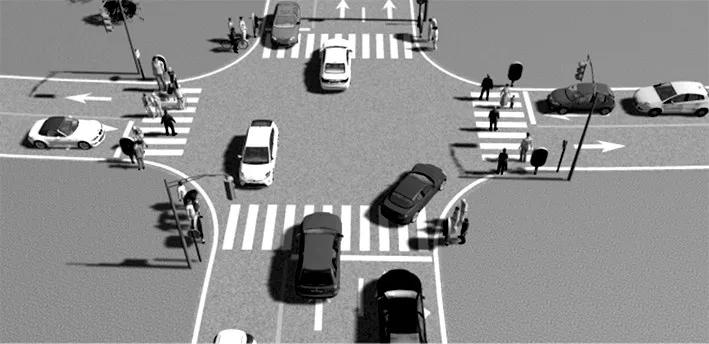
圖5 交通模型
5 復雜車輛模型集成
5.1 復雜車輛模型搭建
AMESim是SIEMENS公司開發的模型軟件平臺,擁有豐富的機械庫、內燃機庫、傳動庫、動力學庫、液壓庫、電子庫等整車仿真所需模塊,能夠根據具體的建模車輛結構及配置快速搭建包括發動機、傳動系、新能源電機電池總成及車輛動力學模型在內的整車模型,提供MATLAB/Simulink接口,方便與其他場景仿真模型集成,車輛模型編譯后添加到S-Function模塊中,實現復雜場景模型與復雜車輛動力學模型的聯合仿真。動力學模型包括底盤模型、懸架模型、輪胎模型、道路模型、ABS/ESP模型、EPS模型、預設的標準操縱工況及AMESim駕駛員模型[7]。
本文采用15自由度底盤模型,模型具有車身3個方向平動、3個方向轉動、4個車輪的轉動及跳動、轉向盤轉動、齒條位移等自由度,能夠體現質心位置、轉動慣量對車輛動態響應的影響。懸架模型基于KC試驗數據,模擬車輪運動狀態變化及懸架系統的彈性變形對車輛行駛狀態的動態響應。轉向系模型可模擬車輛各工況下轉向盤力矩,具備模擬轉向回正工況的能力,能實現轉向盤轉角輸入和轉向盤力矩輸入兩種轉向輸入方式。制動系統模型包含蓄能器、液壓泵、制動缸、控制閥等ESP液壓制動系元件,模擬液壓油節流特性。輪胎模型采用Pacejka 5.2模型,模擬穩態、非穩態工況下輪胎側向力、縱向力、回正力矩、滾動阻力的變化,模擬輪胎外傾角對輪胎力的影響、大側偏角和大外傾角工況下的輪胎力[7]。
5.2 復雜車輛模型集成
為把AMESim模型應用于仿真場景中,需要將其集成在Simulink環境下使用,因此將其封裝為S-Function形式。車輛模型與場景的交互信息主要為輪胎觸地點信息等,包括輪胎觸地點的位置、高度、垂向速度、垂向加速度和觸地點的法向量等。
5.3 車輛模型與場景模型聯合仿真
車輛模型與場景模型的聯合仿真如圖6所示,其中車輛模型只進行了縱向控制,用于驗證車輛模型和場景模型集成的有效性。
由于模型需求,車輛初始狀態為在水平路面行駛,經過最初跳動后進入穩定狀態,然后進行縱向控制。由圖6可知,車輛模型可以在場景模型中正確運行,說明車輛模型和場景模型已經正確集成。
5.4 傳感器設置
本研究中,對自動緊急制動(AEB)功能和自適應巡航(ACC)功能的控制模型進行了集成和仿真。AEB和ACC功能需要車輛通過安裝傳感器感知道路環境,從而向控制器輸出感知信息。因此,仿真中需要對車輛配置傳感器模型。根據AEB和ACC功能的需求,配置了1個長距離雷達和1個短距離雷達,長距離雷達的感知距離為150 m,掃描范圍為9°,短距離雷達的感知范圍為30 m,掃描范圍為80°。
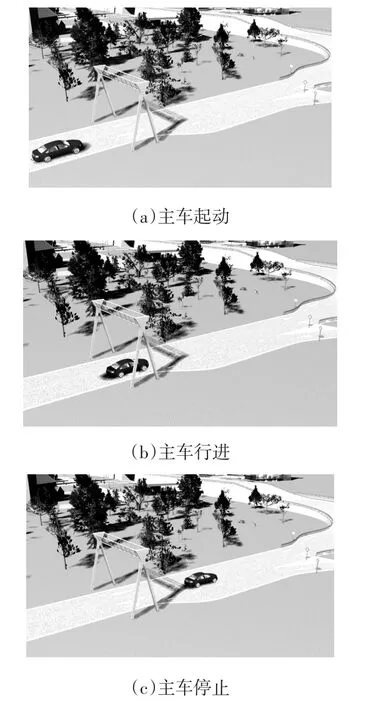
圖6 車輛模型和場景模型聯合仿真結果
6 仿真結果
6.1 自動緊急制動
AEB功能啟動時主要包括3個階段:碰撞時間為2.6 s時,系統發出警告;碰撞時間為1.6 s時,系統控制制動壓力為40%;碰撞時間為0.6 s時,系統控制制動壓力為100%。這里以此邏輯驗證AEB控制模型是否集成正確。
如圖7和圖8所示為AEB控制模型、車輛模型和場景模型集成的仿真結果。從仿真曲線可以看出,車輛在AEB工作過程中經歷了2段明顯的減速度變化。
6.2 自適應巡航
ACC系統是ADAS功能的一種,它是在定速巡航的基礎上發展而來的。在主車行駛過程中,安裝在車輛前部的車距傳感器(雷達)連續感知主車前方環境信息,同時輪速傳感器采集車速信號。當主車與前方車輛的碰撞時間小于閾值時,ACC可以通過與防抱死制動系統(ABS)、發動機控制系統協調動作,使主車減速,從而與前方車輛始終保持一定的安全距離。
圖9、圖10所示為ACC控制模型、車輛模型和場景模型集成的仿真結果。結果顯示,主車發現目標車輛并減速跟隨目標車輛,失去目標車輛后重新加速行駛,恢復設定的速度。

圖7 AEB觸發過程中速度和加速度的變化
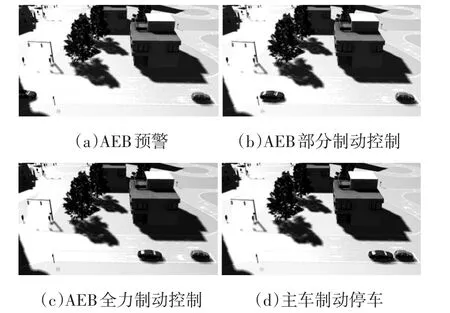
圖8 AEB仿真結果

圖9 ACC功能觸發過程中主車車速和目標車速度變化
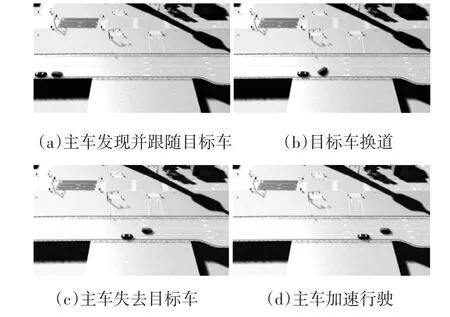
圖10 ACC仿真結果
7 結束語
本文對用于智能車開發和測試的交通場景進行了定義,并提出了搭建場景的框架,定義了動態場景和靜態場景的概念和范圍。通過場景建模和仿真測試方法的研究,規范了場景建模方法,并搭建了仿真測試場景,實現了基于AMESim復雜車輛模型的集成和ACC、AEB控制算法的集成。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
光學精密工程(2016年6期)2016-11-07 09:07:19
