基于平臺和載荷一體化敏捷光學衛星結構設計研究
2018-10-29 09:41:08李文峰陳占勝
制導與引信 2018年1期
孫 偉, 錢 勇, 李文峰, 陳占勝
(1.上海衛星工程研究所, 上海 201109; 2.上海航天技術研究院, 上海 201109)
0 引言
近年來,高分辨率敏捷機動衛星已成為衛星遙感系統的重要發展方向之一[1];所謂敏捷衛星(agile satellite),是指具有快速姿態機動能力的衛星。敏捷光學衛星與高分辨率遙感儀器結合,借助整星敏捷姿態機動的性能,可實現空間高分辨率快速成像,實現包括同軌多條帶拼接成像和同軌立體成像等多種模式成像,提高載荷利用率。
提高衛星的敏捷性能主要有兩種方法:
a) 一是配置大輸出力矩的控制執行機構[2],提高衛星的姿態機動性能,如采用使用大力矩動量輪或控制力矩陀螺;
b) 二是從設計上減小衛星的固有慣量,縮小整星尺寸并使質量相對集中,在此基礎上優化整星構型。
在工程設計中,單純使用大力矩執行機構,會過多消耗機、熱、電等整星寶貴的設計資源,衛星構型也限制了大尺寸執行部件使用;從整星總體設計分析,優化整星構型,減少衛星尺寸,使衛星獲得較小的慣量較為經濟可行;較小的衛星,可選擇較輕控制執行機構,降低整星質量或在選用同等執行機構條件下,進一步提高衛星姿態機動性能。
承上述,提高衛星敏捷性能較可行的方法為優化衛星構型,并在此基礎上開展結構設計。對于敏捷光學衛星結構設計要解決以下問題:
a) 合理設計衛星平臺及載荷優化整星構型及慣量,使衛星平臺與光學載荷連接達到整星緊湊性;
b) 整星模態特性滿足運載要求;
c) 衛星主結構具有較大強度裕度;
d) 衛星可為單機提供良好的力學承載環境。
1 敏捷光學衛星構型及結構設計
1.1 衛星構型設計
設衛星采用降交點地方時6:00太陽同步軌道,則衛星可采取構型如圖1、圖2所示。
X向為飛行方向,Z向為對地觀測方向,衛星可通過繞俯仰軸大角度姿態機動(如圖2)在保證衛星能源前提下,實現對同一目標A的連續觀測
或目標的前后成像;也可以通過滾動軸姿態機動,實現區域內平面目標成像;由于帆板固連與星體,衛星可采用姿態機動的方法使得太陽帆板獲得較為優異的光照角來獲得足夠的能源。
高分辨率相機與衛星平臺連接方式可分為直接對接式、嵌入安裝式、一體式三種,三種構型與連接方式對比如表1所示[3]。

表 1三種構型及連接方式對比
從工程可實現性及衛星平臺設計繼承性考慮:
a) 一體式設計結構最為緊湊,但在當前太陽同步軌道下,衛星絕大多數單機無安裝面,散熱面積不夠,不利于載荷散熱;
b) 采用“嵌入安裝式”優化衛星平臺結構與載荷結構設計,可保留原有衛星平臺結構,單機安裝和散熱面都得到較好解決;
c) 通過優化太陽電池陣與星體連接方式,在降低整星慣量同時,減少帆板撓性振動對整星影響,增強高分辨率光學遙感衛星的成像質量。
1.2 衛星平臺與載荷結構優化設計
“嵌入安裝式”實現如下,載荷主結構為圓筒形如圖3(a),衛星主承力筒為“圓柱+圓錐”結構如圖3(b),因此以相機主結構代替承力筒上端圓柱筒結構,設計如圖3(c)所示。
衛星平臺與相機一體化設計與衛星平臺、相機主承力結構分別設計差異如下:
a) 像機載荷與衛星結構安裝接口由承力筒柱段更改至錐段,整星質心高度降低約0.3 m,X、Y兩軸主慣量下降了約40%(參見表2),由此不僅改善了衛星橫向基頻,并進一步降低了結構質量;
b) 整合后的一體化設計滿足光學部件承載要求,依據承力筒柱段承載條件及力學特性要求設計,借鑒了現有衛星承力筒設計思路,充分繼承現有平臺結構方案,設計也具有很好的繼承性,大大減輕工程化難度。
結構參數確定時,充分考慮以下因素:
a) 碳纖維在鋪層設計達到每層承載均勻化,不存在薄弱鋪層;
b) 合理設計承力筒圓錐段錐度,避免較劇烈過渡,產生應力集中;
c) 在傳力路徑保證完整性,主載荷傳力可設計多條,并行加固。
主傳力路徑路線從上至下設計如圖4所示。
載荷由結構板和桁架梁將在軌工作部分的過載以及貯箱安裝板上的燃料載荷傳遞到承力筒、星箭連接環(Ф 937接口)、適配器至運載火箭。
在進行梁系結構設計時,接頭處采用一體化成型設計,優化結構質量,桿件與接頭處采用膠結方式固定。
1.3 太陽電池陣與星體連接設計
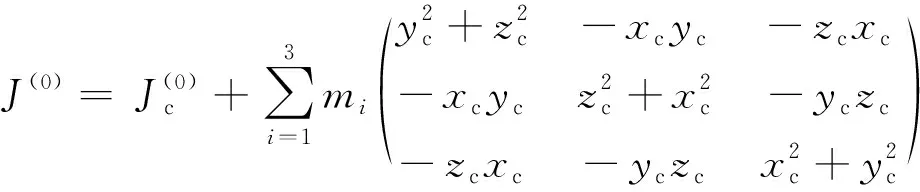
根據慣量計算公式,3塊太陽電池陣附加到整星慣量計算為
(1)

表2 衛星質量特性(相對質心)
因此,太陽電池陣采用兩塊展開,一塊與衛星固連的方式(如圖5),摒棄原兩翼展開太陽電池陣方案(每翼1塊半)。
整星在展開后的相對質心的慣量(kgm2)矩陣為
(2)
兩翼對稱式太陽電池陣展開后相對質心慣量(kgm2)值為
(3)
從計算結果可以看出,體裝式太陽電池陣整星慣量較小。
1.4 質量特性比較
相機直接安裝到衛星承力筒構型與衛星平臺與相機一體化結構設計后,兩者質量及主慣量比較如表2所示。
從表中比較,采用“嵌入式”一體化結構設計比傳統相機直接安裝,降低了衛星質心,將X、Y兩軸主慣量(相對質心)優化了20%,提高了衛星敏捷性。
2 衛星結構有限元分析
為驗證整星的結構力學特性,根據整星構型、布局與結構初步設計方案,對衛星進行了整星結構動力學分析。
2.1 有限元建模
(1) 建立方法
整星有限元模型如圖6所示,根據結構組件力學特性劃分為線單元[4-5]、面單元、體單元,通過節點來表示結構中位移、應變、應力等物理參數;根據結點自由度特征,組合得到整體剛度矩陣、質量矩陣,載荷列陣;再根據不同分析工況,對剛度矩陣、質量矩陣進行處理,并進行求解。在衛星結構建模時充分模擬結構物理特性,不僅僅在結構幾何上與實物一致。
(2) 質量特性
整星有限元分析的質量特性如表3所示。
根據結構模型的簡化,整星有限元模型含12 082個網格節點,1 086個CBAR單元, 72個CBEAM單元,1 368個CHEXA體單元,8 328個CQUAD4四邊形板殼單元,768個CTRIA3三角形板殼單元以及1個CONM2單元。
(3) 邊界條件
邊界條件為星箭對接環各節點固支連接。
2.2 結構特性分析
(1) 模態分析
模態分析的基本的有限元方程為
[K]{u}=0
(4)

在進行模態計算時,衛星底部固支,整星主要模態頻率如表4所示。

表3 整星有限元模型質量特性(相對星箭分離面)
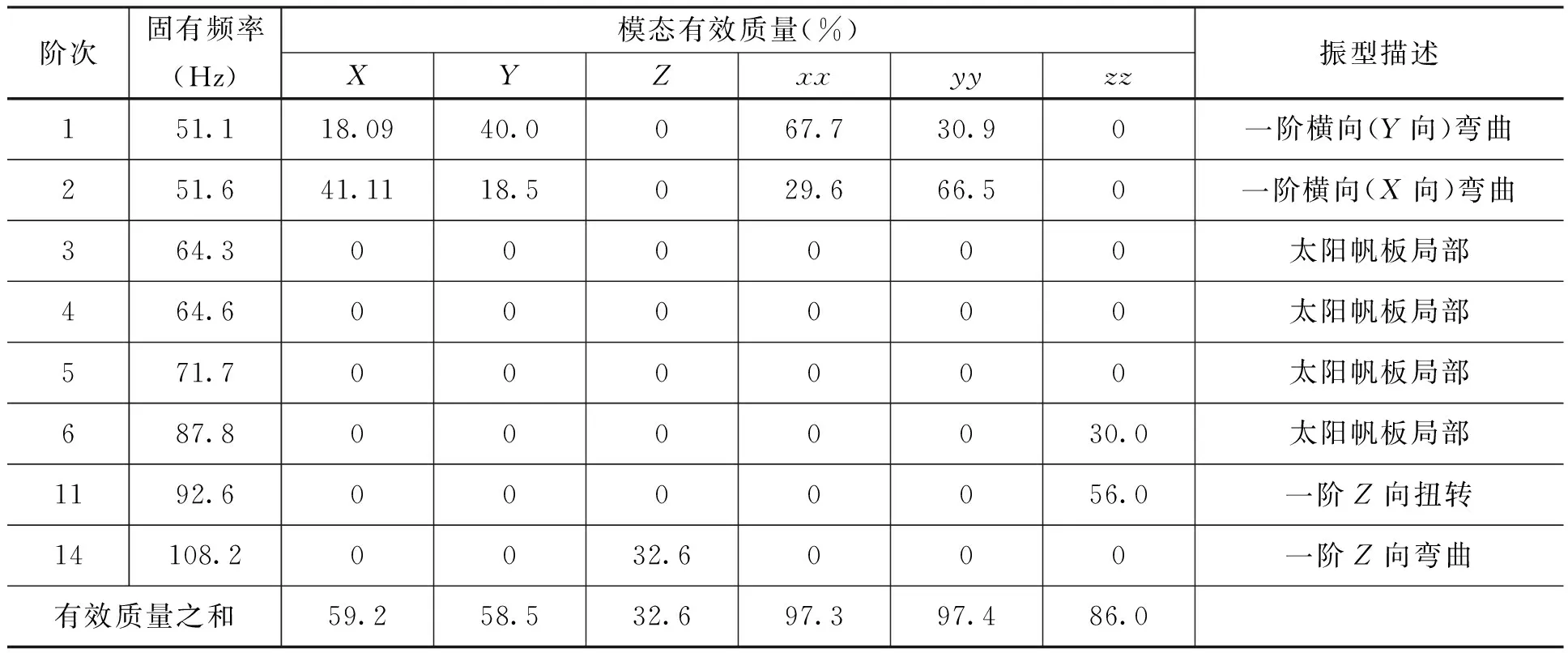
表4 整星前20階模態及模態有效質量的計算結果
圖7、圖8為衛星Y向、X向一階彎曲頻率。
從模態結果可以看出,一階基頻在50 Hz以上,滿足運載對衛星基頻要求,整星具備良好的剛度特性。
(2) 靜力分析
靜力學分析的基本的有限元方程為
[K]{u}={p}
(5)
式中:[K]為整星的彈性剛度矩陣;{u}為結點廣義位移向量;{p}為結點載荷向量。
(a) 靜力分析工況
根據運載方提供的衛星質心處準靜態過載系數,選取1.5倍的安全系數,得到衛星設計的準靜態設計載荷。依據準靜態設計載荷確定整星靜力分析工況(三方向)如表5所示。
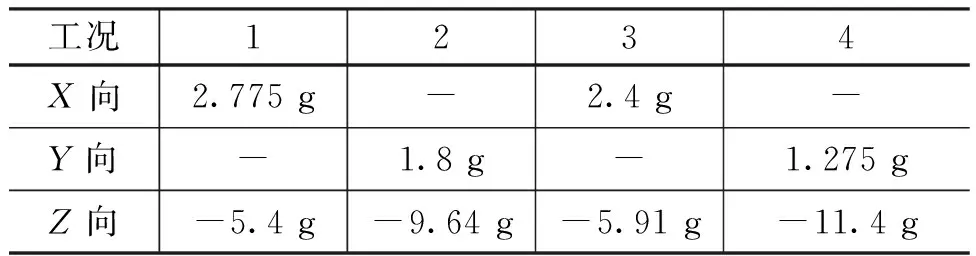
表5 衛星整星靜力分析工況
(b) 整星靜力分析結果
上述4種工況下的最大變形見表6所示,4種工況下最大形變不大于0.5 mm。
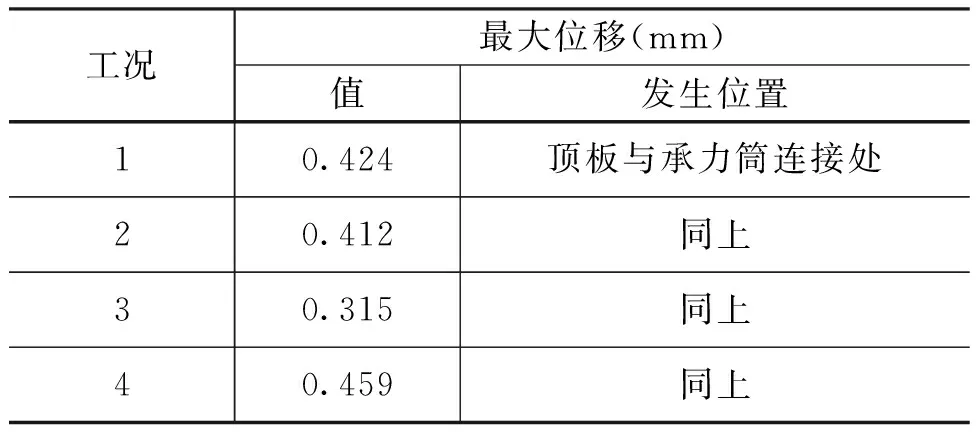
表6 衛星整星最大形變
(c) 分析結論
其余主要結構部件靜力分析結果在此不再詳述,直接給出結果如下:承力筒最大應力為39.1 MPa,遠小于材料許用應力;整星桁架最大應力為29.8 MPa,遠小于材料許用應力;星箭連接環最大應力為44.4 MPa,小于鋁合金的許用應力。
上述部件代表了衛星處于過載以及底部固支狀態下最為危險的狀態,衛星在給定的過載工況下,星體結構受力安全。
(3) 動響應分析
動響應分析方程如下
(6)
頻率響應分析采用星箭分離面輸入激勵的邊界條件,通過模態疊加法,對整星在三個方向上的頻率響應進行分析;X/Y/Z向在8 Hz~100 Hz范圍內,振動幅值取1 g,阻尼比取0.05。最大加速度統計如表7所示。
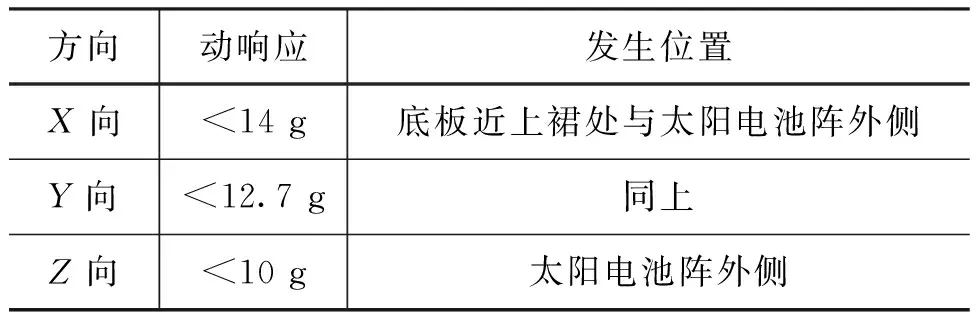
表7 X/Y/Z方向最大動響應及位置
從動響應結果來看,動響應最大發生在太陽電池陣與衛星連接處等力學環境較苛刻處,最大量級不大于14 g,可為載荷提供較優的力學承載環境。
(4) 分析結果總結及討論
整星結構模態、靜力學及動響應特性各項指標較好;在結構優化設計方面,可在太陽電池陣與衛星連接處設計局部“角撐”改善局部動響應特性;在滿足整星力學性能基礎上,并進一步優化結構質量,減薄主承力筒壁厚,優化支撐梁截面積、相機支撐的拓撲結構等。
3 結論
本文采用相機與衛星平臺一體化連接方式來設計衛星主結構,該設計有效地降低了衛星慣量,非常利于衛星敏捷性能實現;有限元分析表明,結構模態、靜力學變形及應變、動響應各項指標較優,滿足各項設計要求,各項結構指標可通過模態、靜力學及振動試驗進一步考核驗證。
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
現代企業(2015年9期)2015-02-28 18:56:50
上海電機學院學報(2015年4期)2015-02-28 14:30:00
機械工程師(2015年10期)2015-02-02 01:14:03
計算物理(2014年2期)2014-03-11 17:01:39
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18
