基于目標跟蹤的信息反饋融合方法研究
2018-10-29 11:03:02張新英王焱春梁芬
創新科技 2018年5期
張新英 王焱春 梁芬

摘 要:針對目標跟蹤問題環境的復雜性,信息的多樣性,傳統的信息融合方法有很多弊端,本文將反饋融合思想引入到傳統的信息融合框架,提出了基于目標跟蹤的信息反饋融合系統,利用信息反饋融合方法為指導,針對不同目標跟蹤場景中傳統跟蹤技術的技術瓶頸,提出相應的改進方法。經過多次仿真驗證,基于目標跟蹤的信息反饋融合系統進一步提高了歷史融合信息的整體利用率,并且可以得到精度更高、魯棒性更好的融合估計效果。
關鍵詞:復雜系統;目標跟蹤;信息融合;反饋控制
中圖分類號:TP391 文獻標識碼:A 文章編號:1671-0037(2018)5-71-4
DOI:10.19345/j.cxkj.1671-0037.2018.05.019
Abstract: In view of the complexity of target tracking problem environment and the diversity of information, the traditional information fusion methods have many drawbacks. In this paper, the idea of feedback fusion was introduced into the traditional information fusion framework, and an information feedback fusion system based on target tracking was proposed. By using the information feedback fusion method as guidance, a corresponding improvement method was put forward aiming at the technical bottleneck of the traditional tracking technology in different target tracking scenes. After multiple times of simulation and verification, the information feedback fusion system based on target tracking further improved the overall utilization rate of historical fusion information, and can obtain better fusion estimation effect with higher accuracy and better robustness.
Key words: complex system; target tracking ; intelligence fusion ; feedback control
基于信息融合理論為基礎的目標跟蹤技術是指利用多種傳感器通過觀測信號估計位置目標的數量、位置、速度、身份等狀態的過程,目標跟蹤作為重要的信息融合問題,一直是研究的重點,從最初的軍事領域,不斷滲透至民用領域,它已成為工業控制、智能醫療、智慧交通、財務管理領域中的關鍵技術[1]。由于目標跟蹤環境日趨復雜,雜波干擾較強、觀測誤差較大、高機動等大量不確定因素使傳統目標跟蹤技術受到越來越嚴峻的挑戰。本文提出將信息反饋融合的概念融入傳統目標跟蹤技術中,深入研究目標跟蹤問題的信息反饋融合系統,以及具體的工程算法。
1 經典信息融合框架比較
為解決目標跟蹤問題,學者們提出了很多信息融合方案。基于目標跟蹤的信息融合框架從宏觀角度反映出目標跟蹤技術發展過程,也反映了信息融合技術本身的發展路徑。以下將回顧幾個重要的跟蹤融合框架[1-3],并對其進行比較。
1.1 貝葉斯跟蹤融合框架
早期目標跟蹤問題主要考慮測量信息的過濾、預測、相關和估計四大部分,如圖1所示。該框架大致思路為:①獲取當前測量信息;②將預測信息與測量信息相關聯;③更新貝葉斯濾波,獲得當前狀態估計。這種融合框架的缺點是結構太簡單,不適合解決更復雜的目標跟蹤問題。
1.2 K-L跟蹤融合框架
K-L跟蹤融合框架主要考慮多源傳感器數據,它的目標模型和觀測模型均具有不確定性。此融合方案在邏輯上進行數據校準、數據關聯,濾波估計,這3個模塊共同完成了整個目標跟蹤工作。該框架的優勢在于覆蓋內容豐富、完整。主要缺點是列出的特定跟蹤技術的合并模型未在模塊中說明[3]。
1.3 信息環跟蹤融合框架
信息循環跟蹤融合框架在結構上由兩個模塊構成:信息融合模塊和資源管理模塊。這兩個模塊通過信息循環結合在一起,可通過對傳感器資源的主動控制來獲得更高質量的觀測數據,使跟蹤效果得到提高[4]。目前,對于信息環的融合跟蹤技術的研究剛剛起步,尚未成熟。
1.4 面向目標跟蹤的信息反饋新模式
近年來,以目標跟蹤為背景,一些新的信息反饋思路出現,一定程度上實現了信息的再利用,但對特定問題的提出缺乏一般性[5]。針對上述問題,提出了空域信息融合平面的概念,時域信息空間的思想,并實時在時、空兩個層面完成反饋融合,最終設計出完整的面向目標跟蹤的信息反饋融合框架的模式。
圖2所示為基于目標跟蹤信息反饋融合框架,該框架的主要目的是從邏輯上和結構上顯示出,在信息反饋融合過程中,空域信息與時域信息的反饋處理方式和過程。
1.5 信息預測反饋融合多目標跟蹤方法
在復雜多目標跟蹤情況下,往往存在許多不確定的因素,當觀測檢測率下降時,傳統跟蹤方法和跟蹤效果會受到較大影響,在低檢測率條件下,單個采樣周期內的觀測信息目標丟失率也高,從而致使跟蹤丟失率變大,又由于二者具有正向關關系,跟蹤檢測率相應就會下降。
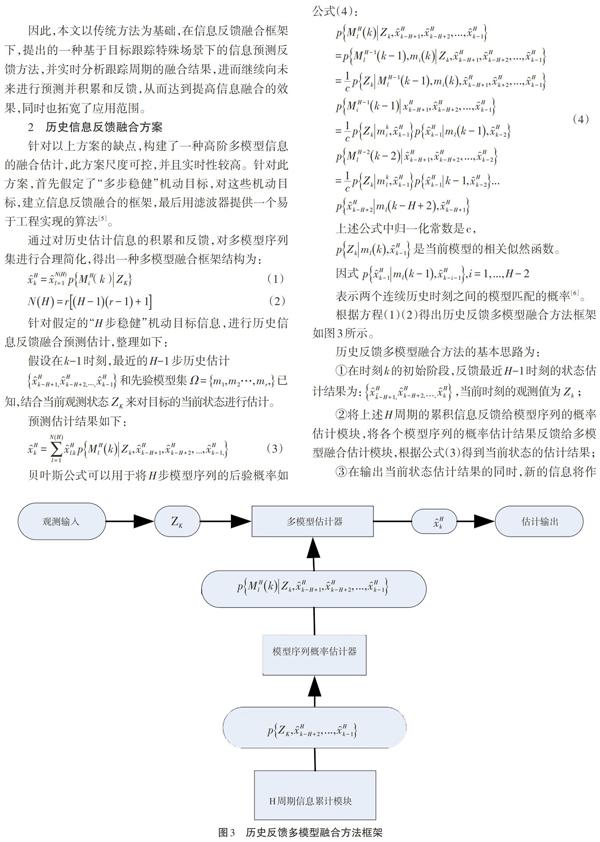
因此,本文以傳統方法為基礎,在信息反饋融合框架下,提出的一種基于目標跟蹤特殊場景下的信息預測反饋方法,并實時分析跟蹤周期的融合結果,進而繼續向未來進行預測并積累和反饋,從而達到提高信息融合的效果,同時也拓寬了應用范圍。
2 歷史信息反饋融合方案
針對以上方案的缺點,構建了一種高階多模型信息的融合估計,此方案尺度可控,并且實時性較高。針對此方案,首先假定了“多步穩健”機動目標,對這些機動目標,建立信息反饋融合的框架,最后用濾波器提供一個易于工程實現的算法[5]。
表示兩個連續歷史時刻之間的模型匹配的概率[6]。
根據方程(1)(2)得出歷史反饋多模型融合方法框架如圖3所示。
歷史反饋多模型融合方法的基本思路為:
①在時刻k的初始階段,反饋最近H-1時刻的狀態估計結果為:[xHk-H+1,xHk-H+2,···,xHk],當前時刻的觀測值為[Zk];
②將上述H周期的累積信息反饋給模型序列的概率估計模塊,將各個模型序列的概率估計結果反饋給多模型融合估計模塊,根據公式(3)得到當前狀態的估計結果;
③在輸出當前狀態估計結果的同時,新的信息將作累加為k+1時刻的反饋信號。
3 仿真分析
在150s的連續飛行中,采樣周期為1s,共發生3次機動狀態。第1次發生在第31~80秒,此期間較弱機動信號加速,加速度為[ak=10m/s2,-10m/s2T];第2次發生在81~119秒,加速度[ak=-30m/s2,30m/s2T]為強機動;第3次是較強動作信號,發生于120~150秒,加速度值為[ak=20m/s2,20m/s2T],剩余時間做勻速直線運動。仿真結果目標軌跡如圖4所示,加速度絕對值變化如圖5所示。
從上述所示結果可以看出,通過累積和反饋多階歷史估計信息,并且把此信息作為判斷目標的真實模式的依據,進一步提升了目標真實模式的判斷正確率,也大大提升了信息融合估計性能。
4 結語
傳統的低階多模型融合方法沒有考慮歷史信息的累計和反饋使用,在面對目標強機動和大觀測誤差時,會使估計精度下降。提出的多步穩健機動目標的概念,采用融合估計方法使當前機動模式的估計精度得到進一步提高。仿真實驗表明:歷史反饋信息融合方法充分利用多階歷史進行狀態估計,提高了信息利用率,使算法對目標真實模式的估計性能得到改善,從而獲得更準確的融合估計效果。
參考文獻:
[1] 韓崇昭,朱洪艷,段戰勝,等.多源信息融合[M].北京:清華大學出版社,2006.
[2] 胡煒薇.多傳感器數據融合中多目標跟蹤關鍵技術研究[D].哈爾濱:哈爾濱工程大學,2007.
[3] 申屠晗.面向目標跟蹤的信息反饋融合方法研究[D].杭州:浙江大學,2014.
[4] 申屠晗,薛安克,駱吉安.多步歷史估計信息反饋多模型融合方法[J].控制理論與應用.2015(1):11-17.
[5] 楊威,付耀文,龍建乾,等.基于有限集統計學理論的目標跟蹤技術研究綜述[J].電子學報.2012 (7):1440-1448.
[6] 胡永利,樸星霖,孫艷豐.多源異構感知數據融合方法及其在目標定位跟蹤中的應用[J].中國科學,2013(10):1288-1306.
