多模型GGIW-GLMB算法跟蹤機動群目標
2018-10-30 03:19:00甘林海劉進忙王剛李松
北京航空航天大學學報 2018年10期
關鍵詞:模型
甘林海, 劉進忙, 王剛, 李松
(空軍工程大學 防空反導學院, 西安 710051)
基于隨機有限集(Random Finite Set,RFS)的跟蹤算法提供了在目標數目未知時變條件下的多目標估計框架,受到廣泛關注[1]。主要包括:概率假設密度(Probability Hypothesis Density,PHD)濾波器[2]、勢概率假設密度(Cardinality PHD,CPHD)濾波器[3]、多貝努利(Multi-Bernoulli,MB)濾波器[4],以及在這幾種濾波器基礎上的部分改進算法[5-7]。
群目標通常指一系列具有相似運動方式的空間臨近目標,當群內目標分布密集時,可采用與跟蹤擴展目標相同的模型和算法進行跟蹤[8]。假設群內目標量測數目服從泊松分布,群質心狀態服從高斯分布,擴展狀態服從逆威夏特分布,并且在量測數目分布的泊松率未知時將群目標狀態建模為伽馬高斯逆威夏特(Gamma Gaussian Inverse Wishart,GGIW)分布是一種常用的群狀態描述算法[9]。文獻[10-11]用GGIW分布描述群目標狀態,引入交互式多模型算法跟蹤多機動群目標,增強了算法對多機動群目標的跟蹤能力。但文獻[9-11]都是采用PHD或CPHD濾波算法實現的多群目標狀態估計,在目標消失的時候會出現對目標數目的“過估”問題,且不能直接形成目標航跡。廣義標簽多貝努利(Generalized Labeled Multi-Bernoulli,GLMB)算法[12-13]以更大的計算量為代價解決了PHD和CPHD面臨的以上問題。文獻[14]將GLMB濾波算法用于多擴展目標跟蹤,提出了一種GGIW-GLMB濾波算法,獲得了比GGIW-PHD和GGIW-CPHD更好的估計性能,但跟蹤目標機動的能力不足,且忽略了測量噪聲對目標擴展狀態的影響。本文提出一種多模型GGIW-GLMB(MM-GGIW-GLMB)算法,通過采用多模型進行運動建模和引入強跟蹤濾波器(Strong Tracking Filtering,STF)提高了算法對機動群目標的跟蹤能力。
1 背景知識
假設X和L分別為多目標的狀態空間和離散標簽空間,令ξ∈X,∈L,則χ={(ξ,)i},i=1,2,…,|χ|,為空間X×L上的隨機有限集。|χ|為集合中的元素個數。
令
(1)

GLMB隨機有限集的概率密度分布可表示為
(2)
(3)
(4)
式中:I為標簽集合。
對狀態為(ξ,)的一個群目標,作出如下假設[14]:
假設1目標檢測概率為pD(ξ,),漏檢概率為qD(ξ,)=1-pD(ξ,)。


由此可將多群目標的量測似然函數的概率密度函數表示為
g(Z|χ) =
(5)
式中:Z為有限的量測集;i(Z)為將所有量測劃分為i個群的所有劃分;(Z)∈i(Z)為對量測集Z的一個劃分;θ:(χ)→{0,1,…,|(Z)|}為目標與量測的關聯映射,若θ()=θ(′)>0,則=′;Θ((Z))為關聯映射空間;θ()(Z)為(Z)中與標簽為的目標相關聯的量測子集(假設該量測子集由標簽為的目標產生)。
ψ(ξ,;θ)=
(6)
2 GGIW分量的預測與更新
2.1 群目標狀態的概率密度分布
p(ξk)=p(γk)p(xk|Xk)p(Xk)=

IW(Xk;vk,Vk)=GGIW(ξk;ζk)
(7)
式中:ξk(γk,xk,Xk)為k時刻群目標的待估狀態;為GGIW分量的參數;為單維狀態空間中的狀態協方差矩陣,?Xk為全維狀態空間中的狀態協方差矩陣,目標位置狀態維數j=1,2,…,d。將式(7)代入式(2)中即可得到群目標GLMB隨機有限集的概率密度分布表示。
2.2 多模型GGIW分量的預測與更新
2.2.1 基于STF-BFG的GGIW分量預測

1) 群目標GGIW分量的BFG近似預測

(8)
(9)
(10)
(11)
(12)
(13)
(14)
(15)
(16)
式中:
2) STF修正

(17)
式中:
(18)
(19)
(20)
(21)
(22)
2.2.2 GGIW分量更新
GGIW分量的待估狀態ξk中,量測比率γk同質心狀態xk和擴展狀態Xk獨立,其對量測子集W的似然函數的概率密度分布為
(23)
式中:PS( · ;γk)為均值為γk的泊松概率密度函數。
由Bayes準則可知,GGIW分量所表示的群目標狀態的后驗概率密度函數可表示為

(24)
GIW(·;mk|k-1,Pk|k-1,vk|k-1,Vk|k-1)=
N(xk;mk|k-1,Pk|k-1)IW(Xk;vk|k-1,Vk|k-1)
令
(25)
(26)
第j個GGIW分量的更新步驟為
(27)
(28)
(29)
(30)
(31)
(32)
式中:
(33)
(34)
(35)
(36)
另外
(37)
(38)
(39)
由逆威夏特分布的性質可知
(40)
2.2.3 模型概率更新
假設跟蹤模型集中的模型個數為M。對于新生目標分量,其模型概率為
(41)
對于存在目標分量,更新的模型概率為
(42)

3 GLMB分量的預測與更新
單模型GGIW-GLMB算法同多模型GGIW-GLMB算法的區別主要在于對GGIW分量的預測和更新部分,多模型GGIW-GLMB算法中對GLMB分量的預測和更新具體步驟為:
步驟1預測。

(43)
式中:
(44)

(1-1L())pB(ξ,)
(45)
(46)

(47)
(48)

(49)
(50)
步驟2更新。
[p(c,θ)(·|(Z))]χ
(51)
式中:
(52)
p(c,θ)(ξ,
(53)

(54)
當pD(ξ,)=pD()時
(55)

實際計算中,為應對多量測子集多群目標帶來的計算量劇增的問題,計算量測子集同目標之間的關聯代價矩陣,并采用相應排序算法選擇其中代價較小的關聯對進行GLMB分量更新,從而達到減小計算量的目的;同時,每一時刻的GLMB分量都會由于狀態與量測子集的關聯而迅速增加,為保證GLMB分量的數目控制在一個合理范圍,需要對更新的GLMB進行刪減,選取其中權值較大的一部分參與下一時刻運算。將刪減后的GLMB分量中的群目標狀態提取出來,即得到群目標狀態的最終估計,具體計算可參考文獻[12,14]。
4 仿真實驗
4.1 仿真場景
假設有3個群目標在雜波環境下運動。群1質心的初始運動狀態為[900 m,-60 m/s,900 m,0 m/s]T,在1~4 s做勻速直線運動;4~36 s做勻速轉彎運動,其中4~12 s的轉彎角速度為0.4 rad/s,12~28 s轉彎角速度為-0.2 rad/s,28~36 s轉彎角速度為0.4 rad/s;36~40 s做勻速直線運動。群2質心的初始運動狀態為[-280 m,56 m/s,278 m,0 m/s]T,在7~12 s做勻速直線運動,12~28 s轉彎角速度為-0.2 rad/s,28~33 s做勻速直線運動。群3質心的初始運動狀態為[0 m,40 m/s,-780 m,0 m/s]T,在28~36 s轉彎角速度為0.4 rad/s,36~42 s做勻速直線運動。3個群的初始擴展狀態分別滿足(a1,b1)=(10,5) m,(a2,b2)=(15,6) m,(a3,b3)=(10,5) m,其中,ai,bi(i=1,2,3)分別為擴展橢圓的長半軸和短半軸。
假設在任何觀測時刻,新生GGIW分量的數目均為3,且位置為真實群目標的初始位置,新生概率為0.03。群目標的檢測概率為0.99,存活概率為0.95。所有新生分量運動狀態的初始協方差均為P0=diag{1002,452},IW(X0;v0,V0)分布的初始參數為v0=10,V0=diag{1,1}。GAM(γ0;α0,β0)分布的初始參數為α0=10,β0=1。雜波服從均值λk=10的泊松分布。測量噪聲標準差為0.1,采樣間隔為1 s。
圖1描述了3個群目標的運動軌跡、仿真背景以及質心位置的一次仿真結果。黑色“·”為群目標和雜波產生的量測;橢圓表示置信水平為0.9條件下群目標擴展狀態范圍;“□”為群1質心的估計位置;“△”為群2質心的估計位置;藍色“〇”為群3質心的估計位置;“→”指向群目標運動方向。從圖中可以看出,算法能夠較好地對群目標質心狀態進行估計和正確分辨出航跡。
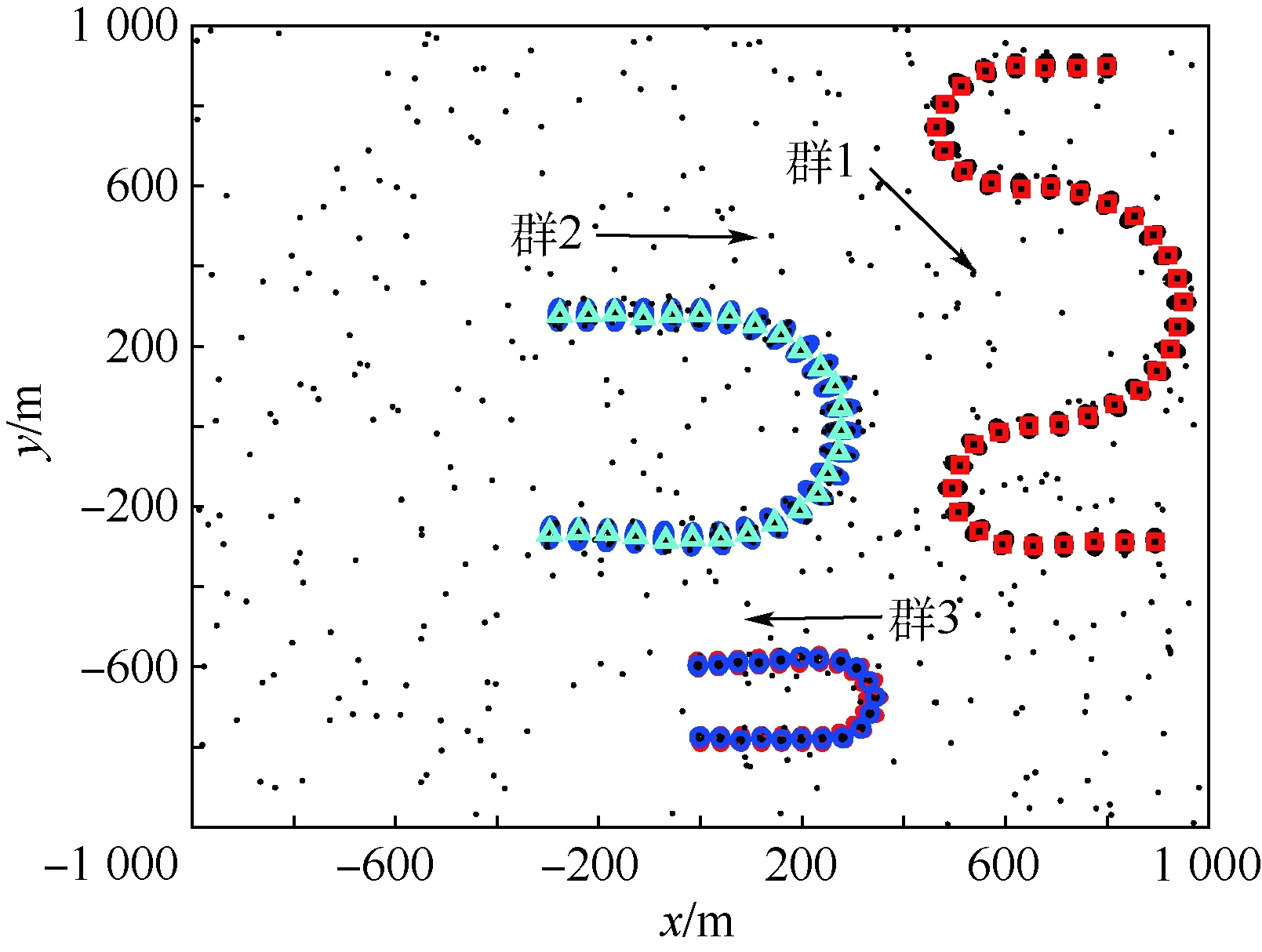
圖1 運動軌跡仿真背景及質心位置一次仿真估計結果Fig.1 Motion trajectory,background and estimated centroid position in one simulation
4.2 算法性能對比
記文獻[14]的算法為GGIW-GLMB,本文算法記為MM-GGIW-GLMB。2種算法跟蹤所給場景的100次蒙特卡羅仿真結果對比如圖2和圖3所示。
圖2和圖3為MM-GGIW-GLMB算法和GGIW-GLMB算法對目標狀態估計的最優次模式分配(Optimal Sub-Pattern Assignment,OSPA)距離和目標數目的估計,并標出了估計的一倍標準差范圍。圖中,淺綠色區域表示MM-GGIW-GLMB估計的一倍標準差范圍,淺藍色區域表示GGIW-GLMB算法估計的一倍標準差范圍,暗綠色區域表示2種算法一倍標準差范圍的重疊區域。對目標狀態估計的OSPA距離和目標數目估計值反映算法對目標狀態及目標數目估計的準確性,一倍標準差范圍反映算法的穩定性。從圖2和圖3可以看出,MM-GGIW-GLMB算法與GGIW-GLMB算法對目標數目估計的準確性相當,但前者對目標狀態(包含質心狀態、擴展狀態和量測比率)估計的OSPA距離更小,準確性更高,且對目標狀態和數目估計的穩定性更好。
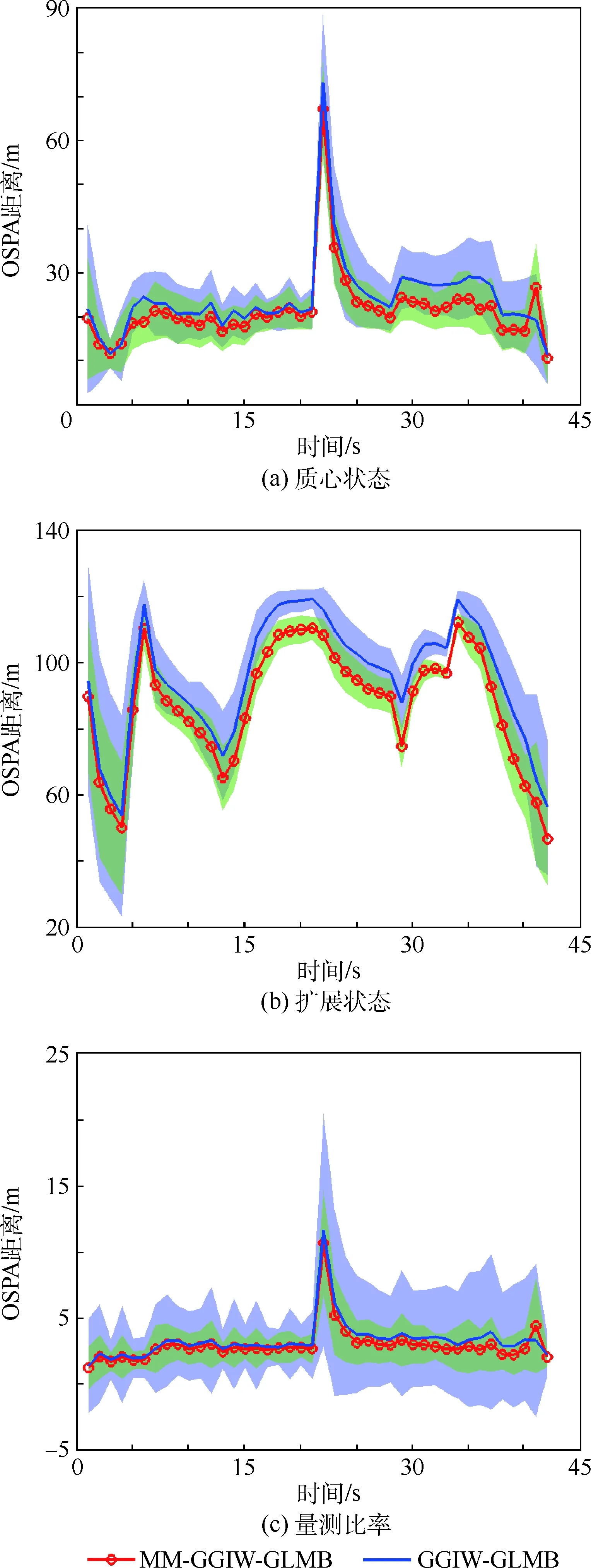
圖2 質心狀態、擴展狀態及量測比率OSPA距離及其一倍標準差Fig.2 OSPA distance of centroid state,extension state and measurement rate and their one standard deviation
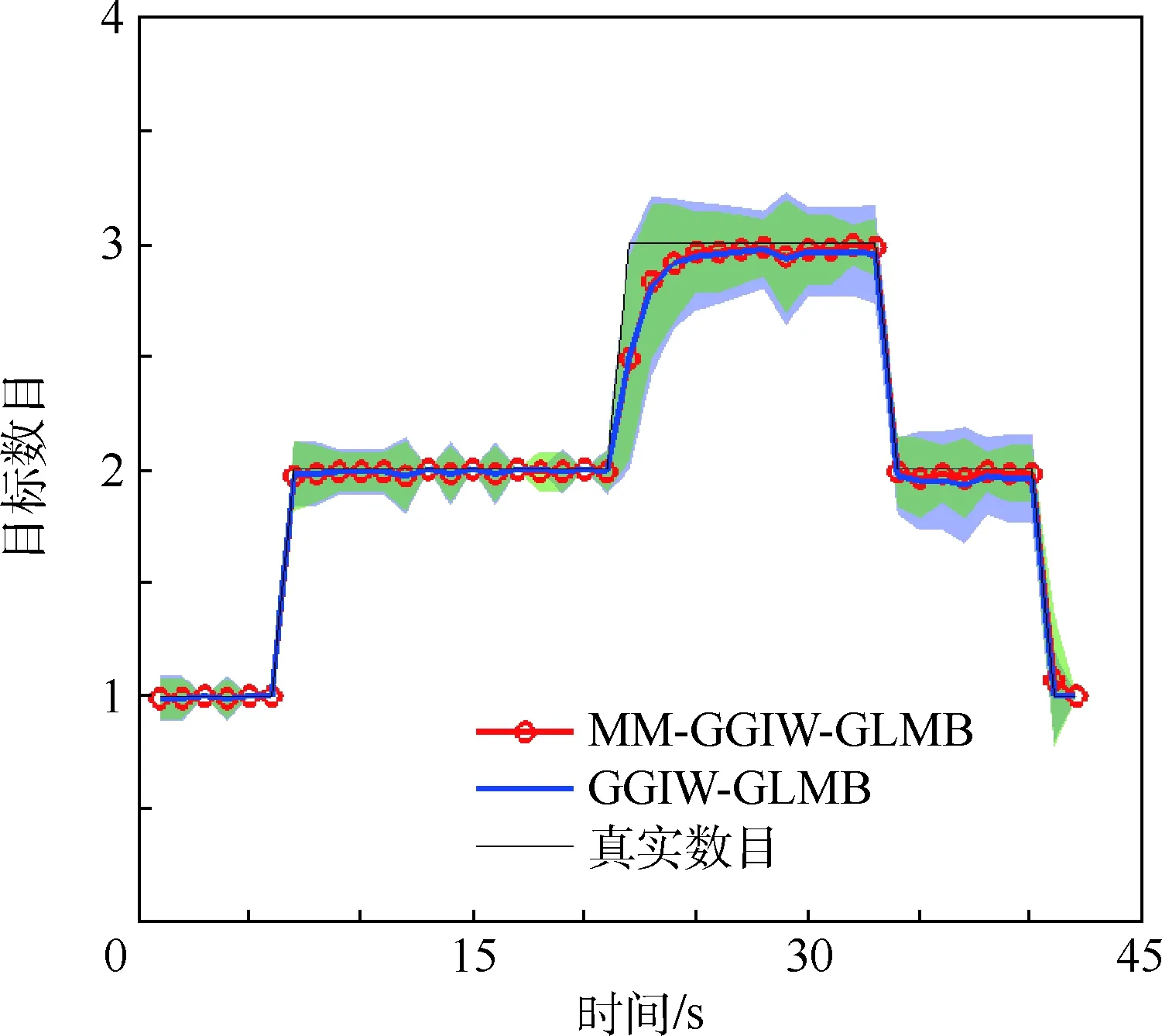
圖3 目標數目估計及其一倍標準差Fig.3 Target number estimation and its one standard deviation
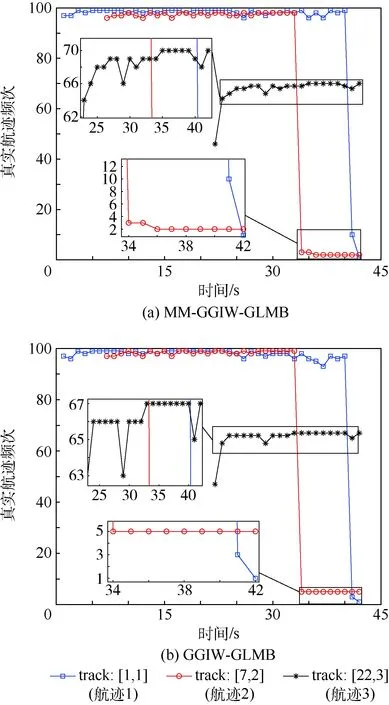
圖4 MM-GGIW-GLMB及GGIW-GLMB算法各時刻真實航跡頻次Fig.4 Frequency of real track at each moment in MM-GGIW-GLMB and GGIW-GLMB algorithms
圖4為100次蒙特卡羅仿真中,真實航跡在每個時刻出現的次數。圖中,track:[a,b]表示在a時刻新生的第b個目標,3條曲線對應仿真中的3條正確航跡。從圖4可以看出,2種算法對航跡1和航跡2的正確關聯概率(對航跡正確加標簽的次數除以蒙特卡羅仿真總次數)高,且航跡延遲的次數較少,MM-GGIW-GLMB算法對航跡3的正確關聯概率要高于GGIW-GLMB算法,但2種算法對航跡3的正確關聯概率相對都偏低,只有不到70%,其主要是航跡起始的延遲造成的,在錯誤關聯的情況中,大部分都是跟蹤了第23 s所新生的第3個目標,導致航跡標簽出錯,延遲了1 s起始,另有少數幾次延遲2~3 s,還有數次出現了航跡丟失。這是由于本文為了減小算法計算量,在采用截斷技術減少小權值的GLMB分量時,對存在GLMB分量和新生GLMB分量的權值進行了統一排序處理,而在目標3新生的時刻,表示群1和群2的GLMB權值較大,且分量數目較多,導致群3的新生分量在進行截斷近似過程中被刪除,這就導致了群3航跡起始的延遲和航跡的丟失;群2新生時刻,因為此時只存在表示群1狀態的大權值GLMB分量,數目相對較少,所以群2新生分量在截斷過程中被刪除的次數較少,航跡延遲和丟失現象不明顯。在此也可以看出,將存活和新生分量共同排序的方法適用于目標數目少的場景,當目標數目增多時,將會導致對晚出現目標的跟蹤延遲和漏跟,此時,需要對新生分量和存活分量分別進行截斷排序,但會造成算法計算量的增加。圖4中,在22~23 s航跡標簽正確率出現較大起伏,主要是由于相比于大權值的已存在分量,群3的新生分量在第22 s雖得以保留,但存在確認延遲(如:第22 s新生的目標在23 s時確認,但此種情況下的航跡標簽是正確的,注意與前文情況區分)。航跡確認的延遲導致在目標真實新生的后續時刻,航跡標簽的正確概率高于目標真實新生的時刻(第23 s,群3的正確航跡標簽次數為:第22 s,群3的正確航跡標簽次數加上第23 s,群3確認的正確航跡標簽次數,減去第22 s確認的正確航跡在第23 s發生丟失的次數)。在圖2和圖3中只能得到跟蹤的整體信息,而不能判斷各條航跡的標簽是否正確。通過對航跡標簽的分析(見圖4),可以了解算法對每一個目標航跡跟蹤的起始和終止情況,彌補了只采用OSPA距離評估方法對算法進行評估的不足。
5 結 論
1) 針對多機動群目標跟蹤的問題,提出了MM-GGIW-GLMB算法,利用隨機矩陣將群目標擴展外形建模為橢圓,用GGIW分量描述群目標狀態。GLMB分量通過加標簽方法產生加標簽的航跡估計,引入BFG和STF算法增強對目標機動的跟蹤能力。
2) BFG算法通過多模型融合,增強了算法對群目標機動模式的適應性,STF算法通過對預測協方差的修正,增強了算法對群目標機動跟蹤的魯棒性。將加標簽正確率作為補充的算法性能度量標準,彌補了僅利用OSPA距離評估GLMB算法性能的不足。
3) 仿真結果表明,MM-GGIW-GLMB算法跟蹤多機動群目標的精度、穩定性和航跡標簽正確率皆優于文獻[14]算法。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
