基于視覺信息的智能下肢假肢路況識別
2018-10-30 01:45:22喻貝貝孟青云喻洪流曹武警趙偉亮
中國康復(fù)理論與實(shí)踐 2018年10期
喻貝貝,孟青云,喻洪流,曹武警,趙偉亮
1.上海理工大學(xué)康復(fù)工程與技術(shù)研究所,上海市200093;2.上海健康醫(yī)學(xué)院,上海市201318;3.上海康復(fù)器械工程技術(shù)研究中心,上海市200093
人體下肢是人類移動步行的重要器官,具有很高的靈活性,可以協(xié)同其他器官完成多種動作[1-2]。由于先天性疾病、工傷或交通事故等原因,每年都有數(shù)以萬計的人失去下肢[3]。根據(jù)2006年國務(wù)院公布的第二次全國殘疾人抽樣調(diào)查數(shù)據(jù)顯示,我國肢體殘疾人數(shù)為2412萬人,占全國總?cè)丝诒壤?.34%[4]。由于當(dāng)前的醫(yī)療水平還不能使失去的肢體重新生長出來[5],所以大多數(shù)患者都是通過佩戴下肢假肢恢復(fù)行走能力[6]。膝上下肢假肢包括接受腔、膝關(guān)節(jié)、小腿腿管、假腳[7]。其中膝關(guān)節(jié)對膝上下肢假肢穿戴者的行走能力具有決定性的影響[8]。然而傳統(tǒng)膝關(guān)節(jié)假肢不能在水平行走、上下樓梯等多種運(yùn)動模式之間進(jìn)行切換,導(dǎo)致下肢假肢穿戴者的運(yùn)動范圍受到極大的限制[9-10],不能在復(fù)雜的環(huán)境下進(jìn)行有效的社會活動。因此,識別出下肢假肢穿戴者的行走路況,根據(jù)路況切換運(yùn)動模式,是智能膝關(guān)節(jié)研究的關(guān)鍵內(nèi)容[11-12]。
國內(nèi)外學(xué)者對智能膝關(guān)節(jié)的路況識別進(jìn)行了一定程度的研究。河北工業(yè)大學(xué)張燕等[13]通過在腰部安置傳感器采集距離信息和地形高度信息,提取特征值,并進(jìn)行簡單訓(xùn)練來識別不同的路況;北京大學(xué)王啟寧等[14]通過三軸陀螺儀、加速度計、力敏電阻和定時器等多傳感器融合的方式,采用實(shí)時模糊邏輯控制去識別不同的地形;美國的Afzal等[15]通過肌肉協(xié)同提取算法,用運(yùn)動模式分類的方式來實(shí)現(xiàn)對不同路況的識別;Shahmoradi等[16]提出通過讓患者佩戴慣性測量單元(inertial measurement unit,IMU)和電阻式壓力傳感器(force sensing resistor,FSR)傳感器采集捕獲運(yùn)動數(shù)據(jù)和步態(tài)時間,用模糊序列的識別方法去識別不同的運(yùn)動模式。綜上可以看出,當(dāng)前路況識別研究大都是基于力學(xué)、運(yùn)動學(xué)和肌電信息進(jìn)行相應(yīng)的處理。運(yùn)動學(xué)和力學(xué)信息具有滯后性,不能及時反映最新的數(shù)據(jù)信息;肌電信號通常比較微弱,而且容易受到鄰近肌肉信號的干擾,其安全性無法保證[17];多傳感信息融合雖然可以提高精度,但是對算法的要求更高,處理過程更為復(fù)雜[18-19]。
視覺信息直觀、準(zhǔn)確,已在多領(lǐng)域得到了廣泛應(yīng)用[20],但是基于視覺信息的智能膝關(guān)節(jié)路況識別研究還處于空白。因此,本工作從視覺信息角度出發(fā),將機(jī)器視覺模塊嵌入智能膝關(guān)節(jié)的控制系統(tǒng)。通過視覺傳感器將采集到的路況圖像信息進(jìn)行實(shí)時處理,探索基于視覺信息的智能膝關(guān)節(jié)假肢路況識別的精度和實(shí)時性。
1 材料與方法
1.1 智能膝關(guān)節(jié)系統(tǒng)研究
該路況識別研究方案是在已經(jīng)研制的智能膝關(guān)節(jié)樣機(jī)的基礎(chǔ)上實(shí)現(xiàn)的[21]。執(zhí)行智能假肢膝關(guān)節(jié)具體功能的部分還是智能膝關(guān)節(jié)的結(jié)構(gòu),因此膝關(guān)節(jié)機(jī)械結(jié)構(gòu)的設(shè)計尤為重要。假肢膝關(guān)節(jié)的樣機(jī)結(jié)構(gòu)如圖1所示,整體結(jié)構(gòu)設(shè)計緊湊,縮減了裝配高度,并進(jìn)行相關(guān)的有限元分析、運(yùn)動學(xué)分析驗(yàn)證了機(jī)械結(jié)構(gòu)的合理性和可行性。
基于前期的基礎(chǔ)理論研究和相關(guān)實(shí)驗(yàn),設(shè)計了智能液壓假肢膝關(guān)節(jié)的總體控制框圖。見圖2。

圖1 液壓假肢膝關(guān)節(jié)機(jī)械設(shè)計圖
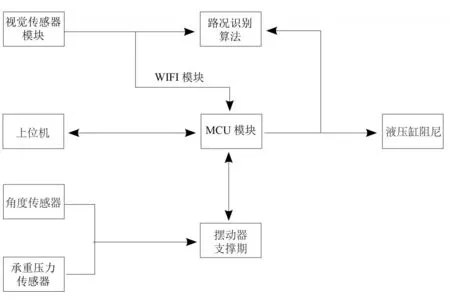
圖2 智能液壓仿生膝關(guān)節(jié)整體控制框圖
樣機(jī)采用兩個獨(dú)立液壓缸通過直線電機(jī)獨(dú)立調(diào)節(jié)閥門,分別控制屈曲和伸展過程中的行走阻尼,實(shí)現(xiàn)仿真步態(tài);在膝關(guān)節(jié)轉(zhuǎn)動軸處放置角度傳感器,采集膝關(guān)節(jié)的運(yùn)動信息;在樣機(jī)上搭載一塊單片機(jī)控制板,用JHBM-7-V(承重壓力傳感器)實(shí)時檢測假肢當(dāng)前承受的重力,識別膝關(guān)節(jié)在擺動過程中的支撐期和擺動期;將OpenMV模塊(機(jī)器視覺模塊)放在膝關(guān)節(jié)軸心處,實(shí)時拍攝假肢膝關(guān)節(jié)前方的外界路況。整個膝關(guān)節(jié)總體長度240 mm,總質(zhì)量1.2 kg,最大承受重量100 kg。
1.2 視覺模塊及特點(diǎn)
OpenMV是一個基于STM32F765VI ARM CortexM7處理器的單片機(jī)和OV7670圖像傳感器的開源微型機(jī)器視覺模塊。OpenMV模塊自帶python3解釋器,可以使用Python腳本編程,大大提高開發(fā)速度。OpenMV所有的引腳輸出3.3 V且兼容5 V,而且留出異步串口總線接口,可以方便地與單片機(jī)通信。同時留出高速SPI接口,可以把簡單的圖像數(shù)據(jù)流傳輸給其他控制器[22]。
OpenMV視覺模塊擁有豐富的硬件資源,引出UART、I2C、SPI、PWM及GPIO等接口,方便拓展外圍功能,其自帶的Python編程接口,為視覺處理開發(fā)帶來極大的方便[23]。視覺模塊體積小巧、功耗低的特點(diǎn),使其可以方便地集成在電路里面。
1.3 圖像處理算法
歸一化互相關(guān)(normalized cross correlation,NCC)算法用來比較兩幅圖像的相似程度,已經(jīng)是一個常見的圖像處理手段,在工業(yè)生產(chǎn)環(huán)節(jié)檢測、監(jiān)控領(lǐng)域?qū)ο髾z測與識別均有應(yīng)用。NCC算法可以有效降低光照對圖像比較結(jié)果的影響[24]。對于圖像來說,每個像素點(diǎn)都可以看成是RGB數(shù)值,這樣整幅圖像就可以看成是一個樣本數(shù)據(jù)的集合。如果它有一個子集與另外一個樣本數(shù)據(jù)相互匹配則它的NCC值為1,表示相關(guān)性很高;如果是-1,則表示完全不相關(guān)。基于這個原理,實(shí)現(xiàn)圖像基于模板匹配識別算法,其中第一步就是要?dú)w一化數(shù)據(jù),NCC相似性度量函數(shù)數(shù)學(xué)公式如下[25]。
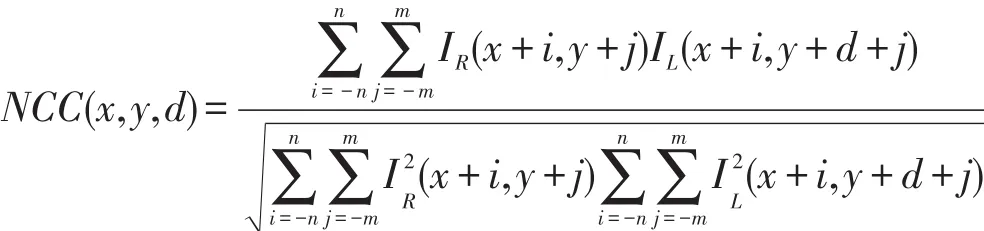
尋找點(diǎn)(x,y)在模板中的匹配過程就是在找最合適的d,使得NCC(x,y,d)最大,這樣對應(yīng)的數(shù)據(jù)樣本就與模板匹配。NCC算法具有很高的準(zhǔn)確性和適應(yīng)性,且所求的NCC值不受灰度值線性變換的影響。
1.4 實(shí)驗(yàn)過程
從上文公式推導(dǎo)可以看出,NCC的數(shù)據(jù)量比較大,但是其抗噪聲能力相對較強(qiáng),綜合考慮識別精度和識別時間,本設(shè)計中相似度閾值設(shè)為0.7。當(dāng)攝像頭采集所得的外界路況數(shù)據(jù)與模板圖片在閾值范圍內(nèi)匹配時,用白色矩形標(biāo)出識別的區(qū)域,并在上位機(jī)中顯示。在實(shí)際應(yīng)用時,若識別到上下樓梯、上下坡等不同的路況時,系統(tǒng)會根據(jù)識別的結(jié)果去控制液壓缸阻尼,切換到相應(yīng)的步態(tài),從而保證假肢識別路況的實(shí)時性。
將OpenMV模塊集成在假肢膝關(guān)節(jié)控制系統(tǒng),實(shí)際圖片如圖3。
本工作在前期采集圖像模板和后期實(shí)驗(yàn)的時候,均采用鹵素?zé)粽彰鳎沟迷O(shè)定的場景光源恒定[26],可最大程度減少因光源的變化而引起識別的誤差等問題。
讓正常人穿戴改裝好的假肢膝關(guān)節(jié),以較慢的速度上下樓梯,模擬患者穿戴假肢行走,在灰度模式下,從不同的角度分別去采集上下樓梯圖像數(shù)據(jù)、平地圖像數(shù)據(jù)、上下坡圖像數(shù)據(jù),并將拍攝所得的圖片保存至上位機(jī)。默認(rèn)保存的圖片是bmp格式的,需要用圖片處理工具將圖片轉(zhuǎn)化為PGM格式的圖片,將處理后的圖片作為模板保存到SD卡中。多角度采集模板圖像,這對后面識別時間和識別精度有很大影響,因此一定要做好采集的工作。
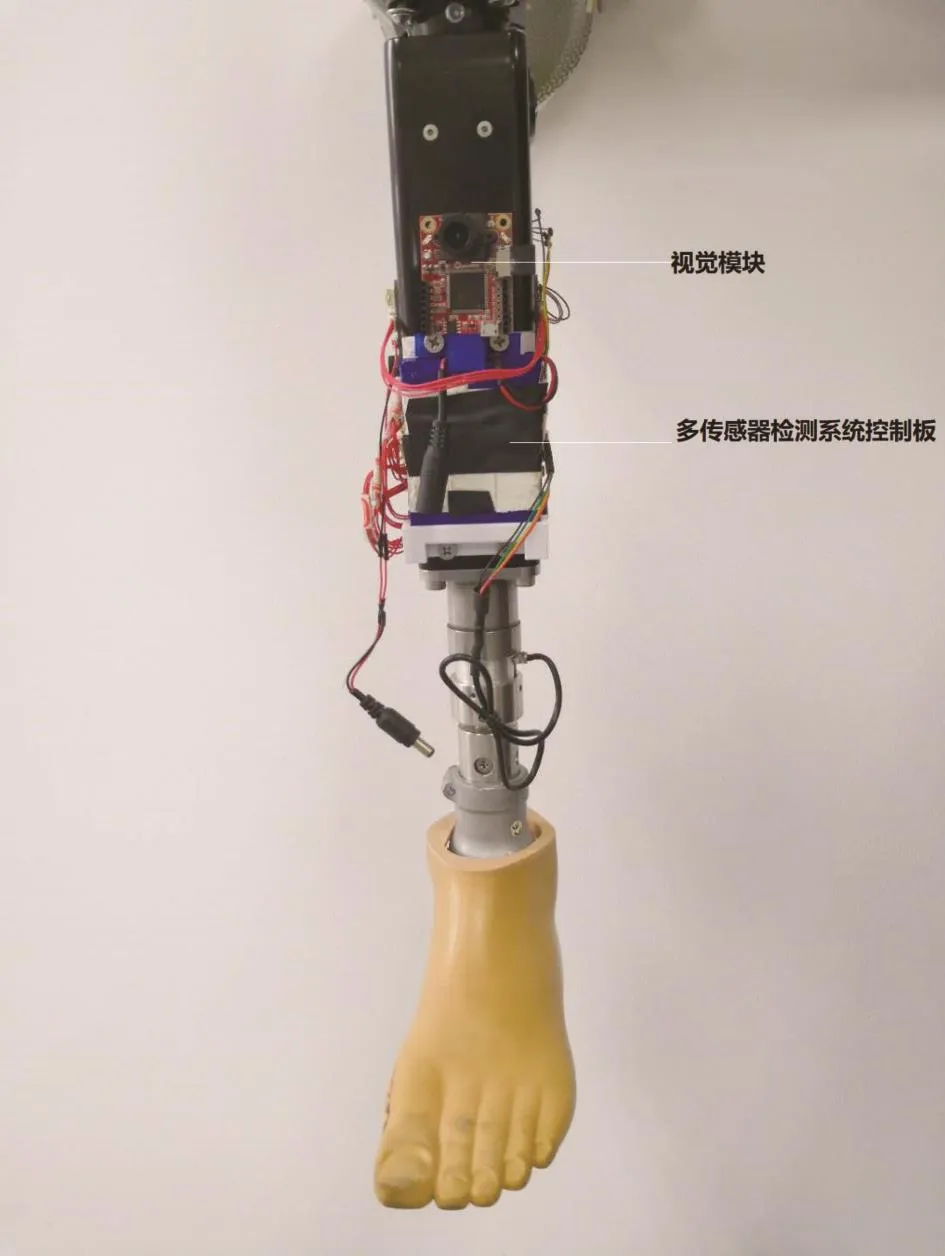
圖3 膝關(guān)節(jié)整體模塊圖片
穿戴測試的實(shí)驗(yàn)對象為上海假肢廠的一名下肢截肢患者,男性,58歲,體質(zhì)量65 kg,身高172 cm,左側(cè)截肢。讓患者穿戴裝配好的假肢,在設(shè)定的場景中行走,同時上位機(jī)通過接收藍(lán)牙模塊傳輸?shù)臄?shù)據(jù)實(shí)時顯示識別的時間和識別的結(jié)果,并記錄結(jié)果。
實(shí)驗(yàn)過程中,當(dāng)攝像頭識別到與當(dāng)前路況不一樣的路況時,若患者等待3 s以上,則執(zhí)行另一種路況的步態(tài);否則,執(zhí)行與當(dāng)前一樣的步態(tài)。由于本工作是純視覺信息去處理路況,后期可考慮加上慣性傳感器輔助處理達(dá)到更好的執(zhí)行效果。
2 結(jié)果
患者在設(shè)定的場景中接收測試,進(jìn)行多次實(shí)驗(yàn),記錄識別時間和識別次數(shù)。實(shí)驗(yàn)證明當(dāng)放置圖片模板過多時,會影響識別的速度;當(dāng)放置的圖片模板過少時,又無法達(dá)到識別的精度。在實(shí)驗(yàn)時,分別放置不同路況的圖片模板數(shù)據(jù),讓患者分別進(jìn)行測試并記錄數(shù)據(jù)。見表1。
綜合考慮識別的速度和精度,針對上/下樓梯、上/下坡、平地5種路況,實(shí)際應(yīng)用中選擇在TF卡中放置5張上樓梯圖片模板、4張下樓梯圖像模板、4張上坡圖片模板、3張下坡圖片模板、2張平地圖片模板共18張5種不同路況的圖片模板進(jìn)行匹配。識別平地、上/下坡、上/下樓梯5種路況的準(zhǔn)確率分別為88.6%、85.3%、78.4%、87.5%和77.9%。結(jié)果證明,視覺模塊可以有效識別不同的路況。
由于本工作目前處于實(shí)驗(yàn)室階段,故沒有考慮大腿假肢穿戴的時候褲子外衣等遮擋攝像頭的問題。在實(shí)驗(yàn)時,假肢是直接裸露的。后期準(zhǔn)備將攝像頭模塊單獨(dú)拿出來,綁在大腿殘肢。
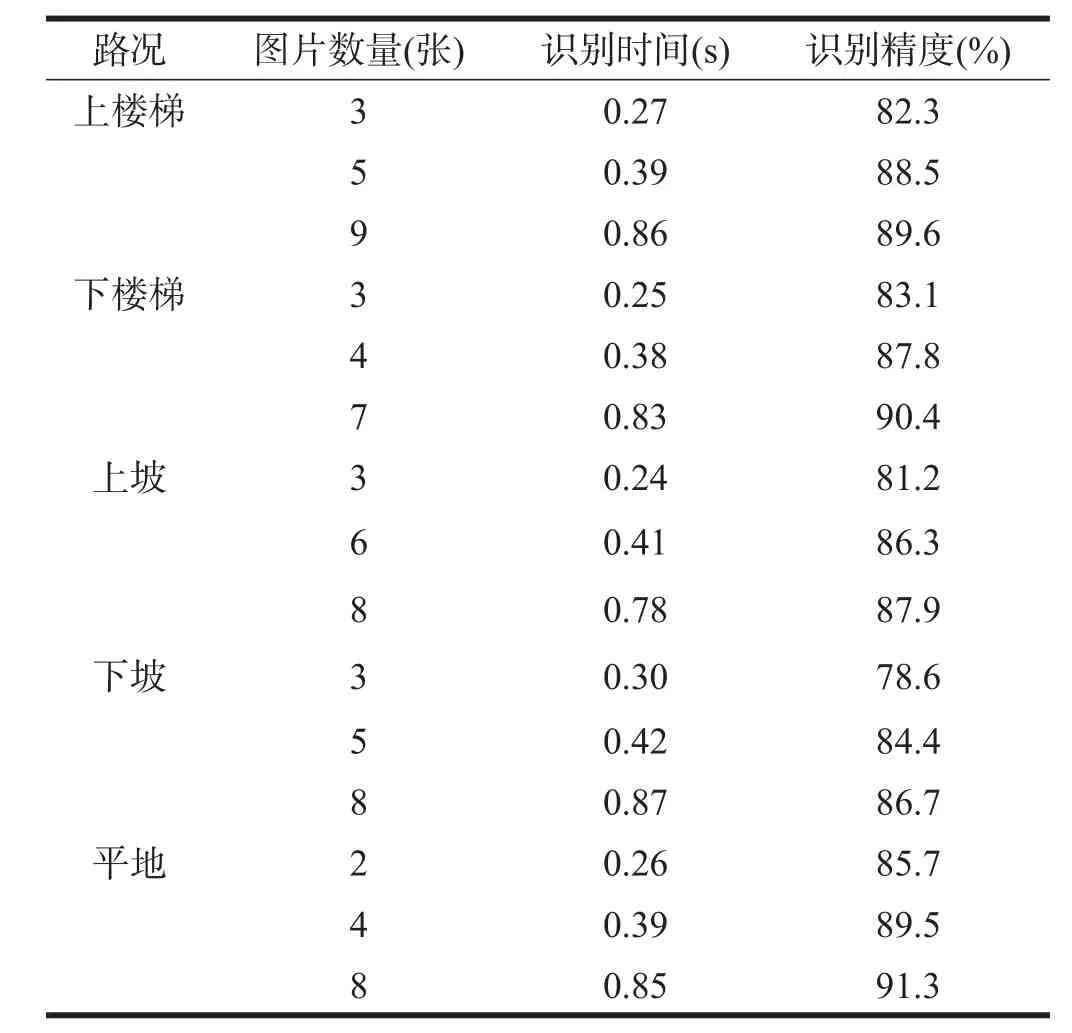
表1 不同數(shù)量不同路況的模板識別結(jié)果
3 結(jié)論
路況識別是假肢智能膝關(guān)節(jié)功能實(shí)現(xiàn)的重要組成部分。相對于傳統(tǒng)的肌電信號和運(yùn)動學(xué)力學(xué)等多傳感器融合的研究,本工作采用視覺信息的方式,通過處理實(shí)時采集的圖像去進(jìn)行路況識別,結(jié)果表明視覺信息可以在智能膝關(guān)節(jié)路況識別中起到良好的效果,提升識別精度以及速度。后續(xù)可考慮將視覺信息與其他信息結(jié)合,更深入地進(jìn)行智能膝關(guān)節(jié)路況及步態(tài)識別的研究。
猜你喜歡
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
- 中國康復(fù)理論與實(shí)踐的其它文章
- 以問題為基礎(chǔ)的學(xué)習(xí)法結(jié)合案例學(xué)習(xí)法在康復(fù)治療學(xué)骨科見習(xí)教學(xué)中的應(yīng)用①
- SWOT分析法在乳腺癌術(shù)后康復(fù)中的應(yīng)用①
- 近15年太極拳健康促進(jìn)的研究熱點(diǎn)
——基于PubMed數(shù)據(jù)庫分析① - 心理治療結(jié)合康復(fù)治療對腦損傷患者抑郁的效果①
- 剪切波彈性成像技術(shù)量化評估肌腱肌肉彈性模量的信度
- 兒童爬行促通訓(xùn)練機(jī)器人在痙攣型雙癱患兒康復(fù)中應(yīng)用的效果①