ORB—SLAM算法在智能家庭清掃機器人中的應用
2018-10-30 05:53:16張汪洋孫偉偉肖琦鹿飛
電子產品世界
2018年9期
張汪洋 孫偉偉 肖琦 鹿飛
摘要:對于家庭智能清掃機器人而言,機器人自我定位與路徑規劃是其實現智能化、全自動化的理論基礎。實時的定位與構圖( simultaneous Iocalization and mapping,SLAM)技術可以很好的解決這個問題。該技術可以利用機器人自身所攜帶的各式傳感器對周圍環境進行采集,并利用采集結果遞增地創建環境地圖,同時使用該地圖實現機器人對自身的定位與導航功能。本文將通過討論ORB-SLAM算法系統的執行過程,并進行仿真實驗,驗證該算法在對家庭清掃機器人的自我定位與導航的實用性。
關鍵詞:ORB特征點檢測;ORB-SLAM;智能家庭清掃機器人
DOI:
10.3969/j.issn.1005-5517.2018.8.009
O 引言
近年來智能家居的發展使得我們的居家生活變得更加充滿樂趣與效率。然而對于像智能清掃機器人這類室內移動型機器人而言,機器人自行定位和對周邊環境的識別是其能否正常高效工作的根本。激光或相機進行實時的定位與構圖(simultaneous localization andmapping,SLAM)[1]一~種相對比較完善的移動機器人自主定位的方法,當機器人處于一個未知的環境中,通過其所攜帶的圖像采集模塊對機器人周邊的環境進行觀測,再遞增地構建環境地圖,并且通過構建的環境地圖對機器人實現實時的定位。
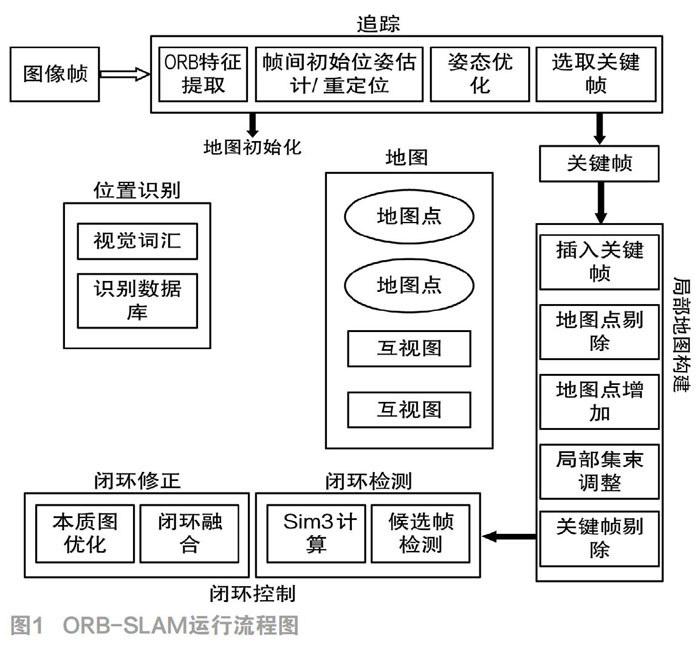
近年來SLAM算法取得了巨大的發展,進而產生了對單目攝像機支持度較高的ORB-SLAM算法。ORB-SLAM是由Raul Mur-Artal,J.M. M. Montiel和Juan D.Tardos于2015年發表在IEEE Transactions on Robotics上。該算法融合了PTAM算法的主要思想以及Strasdat提出的閉環修正方法…并采用ORB特征點進行跟蹤、構圖、重定位、閉環修正以及初始化,并且算法的環境適應力強,對劇烈運動也很魯棒。……
登錄APP查看全文
