船體后體形狀對船舶操縱性的影響研究
2018-11-01 02:16:28劉小健張晨亮夏召丹王大建范佘明
船舶 2018年5期
劉小健 張晨亮 夏召丹 王大建 范佘明
(1.中國船舶及海洋工程設計研究院 噴水推進技術重點實驗室 上海200011;2.中國船舶及海洋工程設計研究院 上海市船舶工程重點實驗室 上海200011)
引 言
船舶設計過程中,型線優化非常重要,良好的線型能使綜合性能優良,各項營運指標滿足IMO的要求,既保證船舶的航行安全,又能使EEDI和EEOI等降到最低[1-2]。
當前,船舶在設計過程中非常注重各營運剖面的性能,由于操縱和耐波等性能評估軟件非常耗時,難以在優化平臺中發揮作用,目前以阻力、自航為主的優化還是占絕大多數。本文利用本單位具有的船舶設計得天獨厚的優勢,采用優化過程中間模型在其拖曳水池中進行操縱等性能的試驗評估,為船舶型線優化提供支撐。
對于水面船舶,改善船舶操縱性的方法有增加舵面積、重心位置坐標前移、采用高效舵等。這些方法本質上沒有改善船舶的線型,只是對其操縱面進行了修改。國內采用懸臂水池試驗對單槳單舵和雙槳雙舵船的尾型進行了研究[3],國外則對U型尾和V型尾的操縱性進行了研究[4],但均未對船舶操縱性進行全面綜合考察。本文將探索一種改變船舶后體形狀提高船舶操縱性能的方法。
本文采用平面運動機構(PMM)進行某船F1A1以及F1A3兩線型(圖1)在設計吃水狀態下的直航、斜航運動和搖首運動等試驗,對兩型船的阻力進行了分析,回歸得到相關的水動力系數,分析尾型對船舶操縱水動力的影響,并通過數值模擬[5],分析兩船的自由自航模操縱性能。從試驗和計算結果來看,F1A3線型的阻力性能、航向糾偏能力稍差,但其回轉性和應舵性比F1A1更好。

圖1 F 1 A 1(黑線)和F 1 A 3(紅線)尾部線型
1 船體主要參數
船體主要參數如表1所示。

表1 船體主要參數表
2 操縱水動力分析
2.1 模型安裝與坐標定義
圖2為坐標系統和安裝示意圖。坐標原點O取在模型中縱剖面、靜水面及重心位置所在橫剖面的交點處,Ox軸指向船頭為正,Oy軸指向右舷為正,Oz軸指向船底為正。前后支桿均通過傳感器與模型相連并對稱于坐標原點O,傳感器的水平連線與Ox軸重合。下頁圖3為模型安裝情況。

圖2 模型安裝簡圖
2.2 F1A1與F1A3水動力比較
下頁圖4為模型阻力試驗結果,F1A3的阻力比F1A1大1%~2%。斜拖試驗等準靜態試驗所測力(Y)和力矩(N)均已無因次化,搖首運動試驗等動態試驗所測力和力矩在一個周期內的積分(Yin,Yout,Nin,Nout)也已無因次化。

圖3 大振幅水平面平面運動機構(LAHPMM)試驗
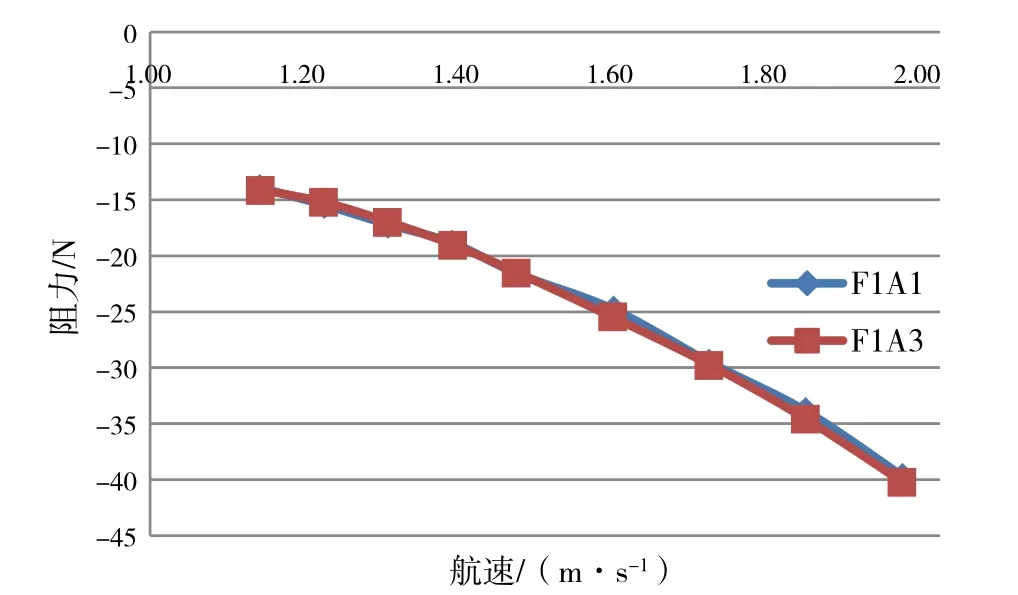
圖4 模型阻力試驗結果
圖5為斜航試驗無因次測試結果。

圖5 斜航試驗無因次測試結果
從圖5可以得出,F1A1與F1A3比較,隨漂角的增大,F1A1船體無因次化橫向力小1.0%-10.0%左右, 而繞重心的搖首力矩小5.0%~15.0%。圖6為純搖首試驗無因次測試結果。
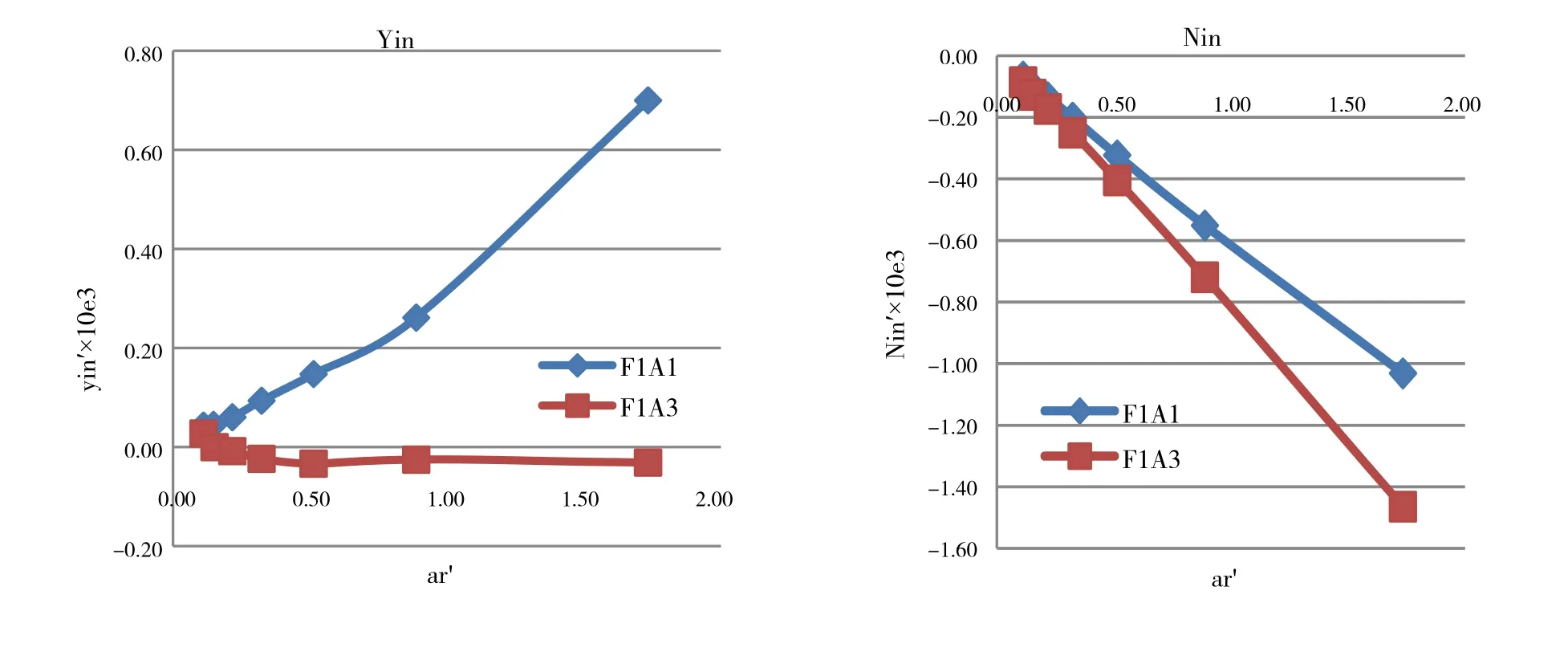
圖6 純搖首試驗無因次測試結果
從圖6可以得出:F1A1與F1A3比較,隨頻率的增大,F1A1船體橫向力(一個周期內的積分)小9.0%左右, 而繞重心的搖首力矩(一個周期內的積分)小8.0%~15.0%。
鎖相放大器的理論輸出信號為直流信號,則數字鎖相放大器中數字低通濾波器的截止頻率越低,系統的信噪比越高。對于普通IIR濾波器,需要根據MTALAB仿真得到收斂的量化系數來調整程序和寄存器的位數,調節過程繁瑣[6]。截止頻率越低需要的濾波器階數越高,加之算法復雜,導致PFGA資源占用過多,在增加系統功耗的同時增加了調節的復雜程度,因此,為了充分利用FPGA內部資源,需要針對不同的噪聲帶寬對其階數進行調節。
根據上述曲線,回歸得到兩線型船的水動力系數如表2所示。
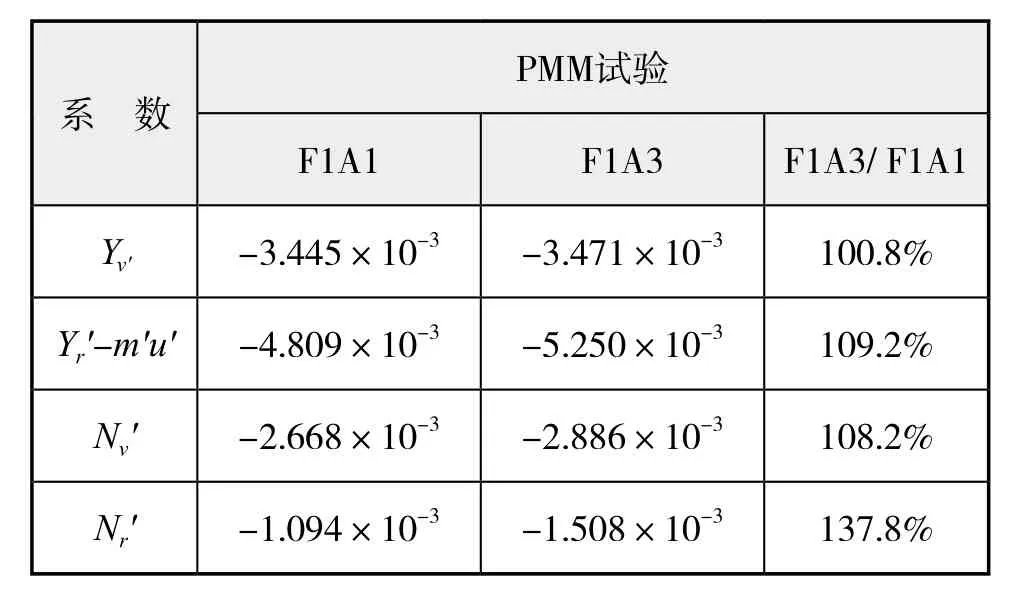
表2 斜航與搖首運動水動力系數
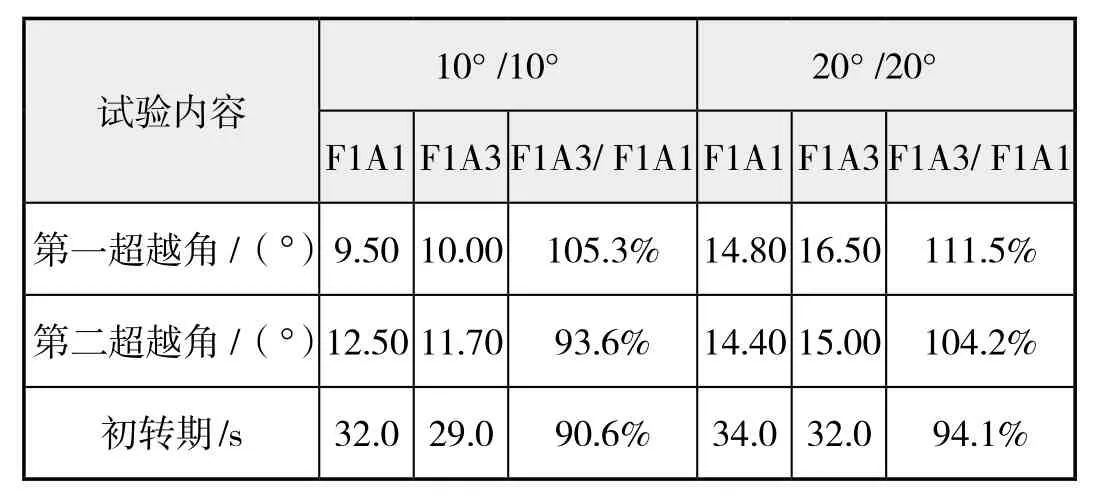
表4 z形試驗模擬結果
3 操縱運動模擬分析
基于上述模型試驗結果,模擬計算了該船30°回轉試驗、z形試驗和螺線試驗,得到如下結果,分別見表3、表4和表5,以及下頁圖7、圖8和圖9。

表3 回轉試驗模擬結果

表5 螺線試驗模擬結果

圖7 30°回轉試驗模擬

圖8 z形試驗模擬
從表3和圖7可以看出:F1A3線型的縱距、橫距、戰術直徑和回轉直徑分別為F1A1的82.8%、74.1%、74.5%和78.2%,F1A3比F1A1的回轉性能更好。
從表4和圖8可以看出:F1A3線型的10° z形試驗的第一、第二超越角以及初轉期分別為F1A1的105.3%、93.6%和90.6%;F1A3線型的20° z形試驗的第一、第二超越角以及初轉期分別為F1A1的111.5%、104.2%和94.1%。F1A3比F1A1的航向糾偏能力稍差,但是應舵性要好。
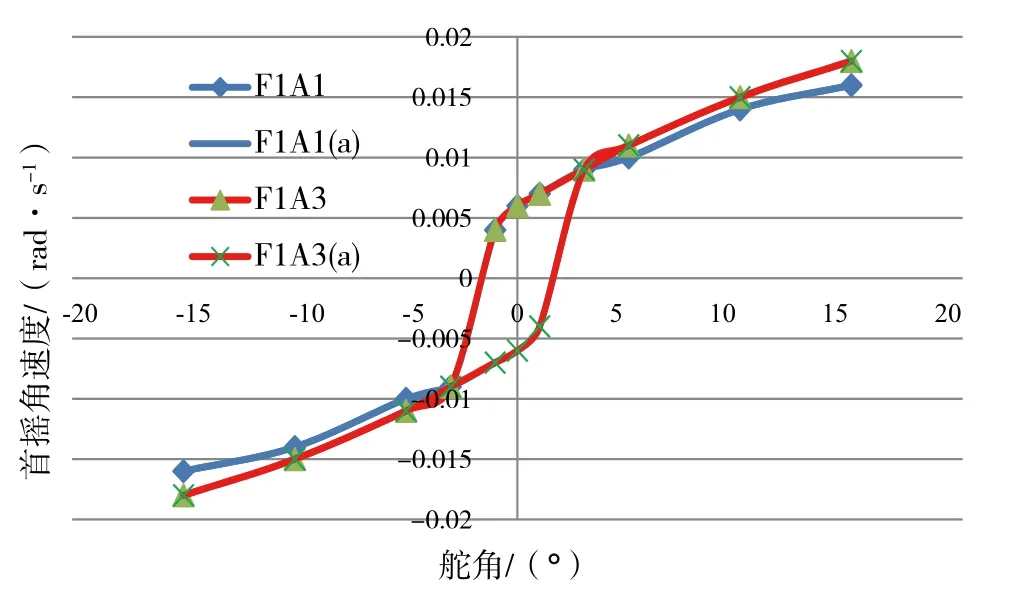
圖9 螺旋試驗模擬
從表5和圖9可以看出:F1A3線型的不穩定環高、不穩定環寬以及0°舵角首搖角速度與F1A1相同;F1A3與F1A1的航向穩定性差異不大,但是F1A3隨角度的增加,首搖角速度增加更快。
4 結 語
本文采用平面運動機構(PMM)進行某船F1A1以及F1A3兩線型在設計吃水狀態下的直航、斜航運動和搖首運動等試驗,對兩型船的阻力進行了分析,回歸得到相關的水動力系數,分析后體形狀對船舶操縱水動力的影響,并通過數值模擬,分析了兩船的回轉性和航向穩定性。從試驗和計算結果來看,F1A3線型的阻力性能、航向糾偏能力稍差,但其回轉性和應舵性比F1A1更好。F1A3類似隧道尾,民致壓力中心前移,使船趨于不穩定。對于F1A1回轉性本來就比較好的船型,將其后體形狀變成V字型或增加分水踵是提高其航向穩定性的有效方法。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學技術(2022年14期)2022-09-22 03:07:40
艦船科學技術(2022年2期)2022-03-29 01:12:44
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
中國船檢(2017年3期)2017-05-18 11:33:09
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03