基于觀測器的線性離散信息融合預(yù)見控制算法
2018-11-01 03:49:10高春雷
航天控制 2018年5期
高春雷 趙 賓,2 胡 洲
1.南京航空航天大學(xué)金城學(xué)院,南京211156 2. 南京航空航天大學(xué)自動化學(xué)院,南京211106 3. 四川航天系統(tǒng)工程研究所,成都 610100
最優(yōu)控制的二次型性能指標(biāo)函數(shù)中通常包含期望軌跡和控制能量的軟約束信息,信息融合預(yù)見控制算法通過融合這些軟約束信息以及系統(tǒng)狀態(tài)方程和輸出方程的硬約束信息,獲得協(xié)狀態(tài)和控制量的最優(yōu)估計。文獻[1~5]利用信息融合估計方法求解線性系統(tǒng)和非線性系統(tǒng)的最優(yōu)控制問題。文獻[6]針對期望軌跡和干擾可預(yù)見的最優(yōu)跟蹤問題,提出了一種基于誤差系統(tǒng)的信息融合最優(yōu)控制方法。文獻[7]設(shè)計了欠驅(qū)動垂直起降飛行器懸停模式下的非線性信息融合控制方法,具有良好的控制效果和解耦性能。
信息融合控制算法本質(zhì)上是一種基于狀態(tài)反饋的最優(yōu)控制方法,在利用該算法構(gòu)建控制系統(tǒng)時需要引入全狀態(tài)反饋。但在實際工程中,如吊車控制系統(tǒng)[8]、水面船舶控制系統(tǒng)[9]等的部分狀態(tài)變量無法直接測量得到,導(dǎo)致以上方法在實際應(yīng)用中都存在不同程度的局限性。針對這一問題,本文提出了基于觀測器的線性離散信息融合預(yù)見控制算法,證明了在該算法中運用觀測器設(shè)計狀態(tài)反饋仍然具有分離特性。
1 線性非時變離散系統(tǒng)的可控可觀性
線性非時變離散系統(tǒng)的狀態(tài)方程式為:
x(k+1)=Ax(k)+Bu(k)
(1)
y(k)=Cx(k)+Du(k)
(2)
考慮狀態(tài)反饋:u(k)=-Kx(k)+v(k),則在此反饋作用下,閉環(huán)系統(tǒng)為:
x(k+1)=(A-BK)x(k)+Bv(k)
(3)
針對系統(tǒng)(1)、(2)構(gòu)造系統(tǒng)的觀測器,即:

(4)
式中,x(k)是系統(tǒng)的n維狀態(tài);u(k)是m維輸入;y(k)是實際系統(tǒng)的p維輸出,k為離散時間;A,B,C,D為適當(dāng)維度的常數(shù)矩陣;x(0)為系統(tǒng)初始狀態(tài),x(0)=x0。
引理1 對于式(1)和(2)所組成的線性非時變離散系統(tǒng),若A為非奇異,則此系統(tǒng)用狀態(tài)反饋(3)時能任意配置極點的充要條件是(A,B)能控,即rankU=rank[B,AB,…,An-1B]=n。如果A為奇異,則此僅為能控的充分條件[10]。
引理2 對于系統(tǒng)(1)和(2),若A為非奇異,狀態(tài)觀測器(4)存在的充要條件是(A,C)能觀,即rankU=rank[C,ATCT,…,(An-1)TCT]T=n。如果A為奇異,則此僅為能觀的充分條件[10]。
2 線性離散信息融合預(yù)見控制算法
對于系統(tǒng)(1)和(2),假設(shè)y*(k)表示p維期望輸出向量。提出如下控制問題:求取某一控制律,使系統(tǒng)實際輸出y(k)跟蹤期望輸出y*(k),并使得性能指標(biāo)函數(shù)

(5)
取值最小。式中,信息權(quán)重矩陣Q(k+1)∈Rp×p,R(k)∈Rm×m為對稱正定陣[6]。控制量u(k)的最優(yōu)融合估計為:

(6)


(7)

(8)
帶觀測器的信息融合預(yù)見控制系統(tǒng)框圖如圖1。

圖1 帶觀測器的信息融合預(yù)見控制系統(tǒng)框圖
3 狀態(tài)觀測器設(shè)計
假設(shè)系統(tǒng)(1)和(2)可觀,構(gòu)造觀測器:
(9)
選擇“反饋增益矩陣”G,使(4)穩(wěn)定,即使A-GC的特征根全部在單位圓內(nèi)。由此可得:

(10)
由于A-GC的特征根全部在單位圓內(nèi),所以式(5)穩(wěn)定,即有:

(11)

(12)

對于連續(xù)系統(tǒng)配置極點,極點越往左方遠(yuǎn)離虛軸,則系統(tǒng)越穩(wěn)定,回到平衡位置的速度也越快。而對于離散系統(tǒng),需要將極點配置在單位圓內(nèi),極點越靠近原點越穩(wěn)定。通常將離散系統(tǒng)的所有極點直接配置在原點,以使所有狀態(tài)估計值達(dá)到最快的收斂速度。

e(z)=zn+an-1zn-1+…+a1z+a0
(13)
由式(6)容易看出,該控制量的求取表達(dá)式是一個關(guān)于x(k)的全狀態(tài)閉環(huán)反饋控制系統(tǒng),由于本文所討論的是基于觀測器設(shè)計閉環(huán)反饋控制系統(tǒng),則式(6)可變?yōu)?/p>
(14)


(15)
其中,y(k)為系統(tǒng)的輸出信息,在實際系統(tǒng)中,即為傳感器的量測信息。
4 分離特性證明
定理1 對于形如式(1)和(2)所表示線性離散信息融合預(yù)見控制系統(tǒng),構(gòu)造如式(4)所示的觀測器,分離特性仍然成立。對于如式(6)所示的閉環(huán)狀態(tài)反饋控制系統(tǒng),其反饋狀態(tài)由觀測器估計狀態(tài)替代后,仍然保留系統(tǒng)原有的性質(zhì)。
證 由式(6)可表示為


可得:

(16)
又由
y(k)=Cx(k)
(17)
將式(16)和(17)代入式(15)中,可得:

(18)
將式(16)代入式(1)中,可得:

(19)
結(jié)合式(18)和(19),可得到增廣系統(tǒng)方程如下:

(20)

(21)
式(21)表明,整個系統(tǒng)的特征多項式分別由(A-BK)和(A-GC)的特征多項式的乘積構(gòu)成。因此,觀測器的引入不影響由信息融合預(yù)見控制算法所配置的狀態(tài)反饋系統(tǒng)的特征值λ(A-BK),而狀態(tài)反饋也不影響觀測器的特征值λ(A-GC)。由此可以得出,連續(xù)線性系統(tǒng)具有的分離特性,在線性離散信息融合預(yù)見控制系統(tǒng)中同樣成立。證畢。
5 仿真實驗
為了驗證在信息融合控制中運用觀測器的有效性,本小節(jié)通過吊車這一實際系統(tǒng)進行仿真實驗。為了避免被控對象過于復(fù)雜,下面考慮一個典型的一維吊車系統(tǒng)的“擺動抑制控制問題”。根據(jù)文獻[8,11],一維吊車系統(tǒng)的線性化動力學(xué)模型表示如下:



輸出方程中包含小車的運動位置和負(fù)載的擺角,構(gòu)造輸出方程如下:


假設(shè)觀測方程即為輸出方程,小車的運動位置和負(fù)載擺角可直接測量。系統(tǒng)完全可觀測,即:rankU=rank[C,ATCT,…,(A4-1)TCT]T=4,則存在:
使得A-GC的特征多項式(式13)為zn,代入A、C及相關(guān)的參數(shù)后求得:
為了清楚展現(xiàn)估計狀態(tài)的收斂過程,圖2~圖5的仿真時間取為2s。從上面的4個圖中可以看出,雖然仿真前僅假設(shè)了x2和x4的觀測值包含初始誤差,但在實際估計過程中,x1和x3的觀測值也包含了誤差。這是因為本文所采用的仿真模型是一個欠驅(qū)動系統(tǒng),系統(tǒng)的各個狀態(tài)間存在嚴(yán)重耦合,所以導(dǎo)致在估計的過程中x1和x3的觀測值與真實值也會有所偏差,不過,這4個狀態(tài)的觀測誤差在經(jīng)過4步估計后就收斂到0了。

圖2 吊車位置估計誤差

圖3 吊車速度估計誤差

圖4 負(fù)載擺動角度估計誤差

圖5 負(fù)載擺動角速度估計誤差
圖6為吊車系統(tǒng)的小車位置跟蹤和負(fù)載擺角跟蹤誤差曲線,由仿真結(jié)果可以看出在負(fù)載吊運過程中,吊車系統(tǒng)在5s左右同時實現(xiàn)了小車位置跟蹤和擺角抑制。本文所采用的仿真對象模型及參數(shù)與文獻[8]基本相同,文獻[8]采用了部分反饋線性化方法,最后的仿真結(jié)果是吊車系統(tǒng)在7s左右同時實現(xiàn)了小車位置的跟蹤和負(fù)載擺動的抑制。通過對比可以發(fā)現(xiàn),本文所采用的方法具有更好的控制效果。
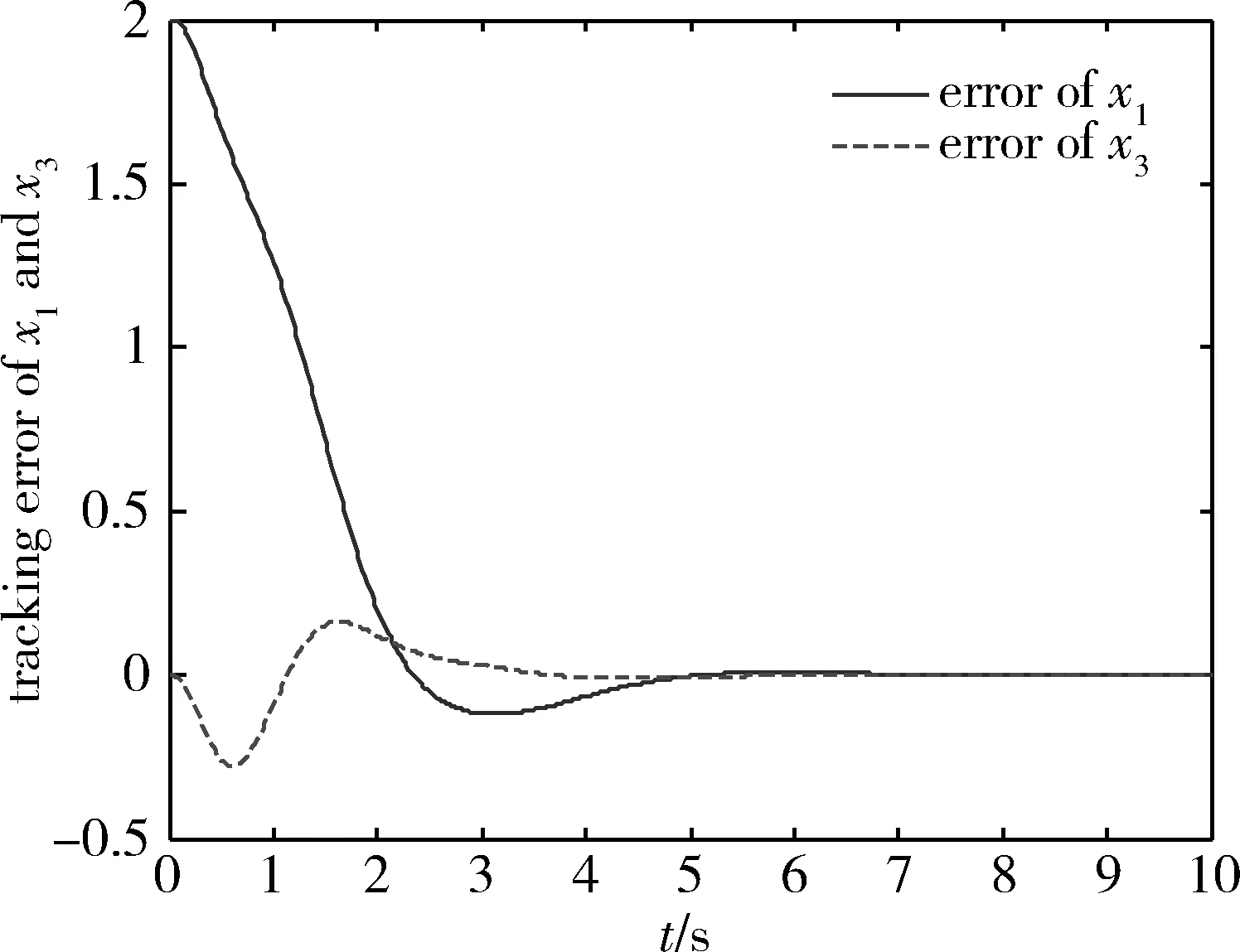
圖6 小車位置和負(fù)載擺角的跟蹤誤差
6 結(jié)論
針對線性離散信息融合預(yù)見控制算法在實際應(yīng)用中難以實現(xiàn)全狀態(tài)反饋的問題,提出了一種基于離散觀測器構(gòu)建其全狀態(tài)反饋的方法,并證明了對于利用觀測器設(shè)計的線性離散信息融合預(yù)見反饋控制系統(tǒng),分離特性仍然成立,在觀測器的估計初值有誤差的情況下,最多經(jīng)過n步估計(n為系統(tǒng)的狀態(tài)維數(shù)),觀測誤差就可以收斂到0。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年1期)2021-03-19 08:28:38
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46